1. Introduction
Remote sensing satellites obtain information from the Earth’s surface through optical or microwave payloads [
1]. They are widely used in many fields, including agriculture, forestry, ocean, meteorology, and military [
2]. With the growing emphasis on space and the ongoing growth of science and technology, the number of remote sensing satellites has expanded significantly in recent years. Meanwhile, the temporal, spatial, and spectral resolutions of satellites have also been gradually enhanced [
3]. Satellite clusters, such as Planet Labs, Gaofen, and Jilin-1, are formed as a result of these advancements [
4,
5]. Remote sensing satellite clusters regularly consist of numerous wide-swath satellites and high-resolution satellites. They cooperate to complete census and detailed survey tasks for various targets. Nevertheless, constructing such satellite clusters is costly due to the several processes involved, including the design, manufacture, testing, launching, and management. Consequently, the effectiveness of satellite clusters has to be evaluated accurately for better decision making [
6]. With the emerging drawbacks of qualitative evaluation methods, quantitative evaluation methods have received considerable attention in recent years [
7,
8].
The four main branches of the current quantitative effectiveness evaluation methods are the analytical method, experimental statistical method, multi-index synthesis method, and simulation method [
9]. Although the analytical method is simple and efficient, it has difficulty in solving certain complex evaluation problems. Zhao [
10] studied the effectiveness equivalence algorithm of the weapon system and proposed an approximate analytical expression of the weight coefficient. Next, despite the high reliability of the experimental statistical method, it requires real data, which is normally scarce and difficult to obtain. Xiong [
11] used more than ten years of in-orbit data to evaluate NASA EOS Terra and Aqua MODIS on-orbit performance. The multi-index synthesis method has a good hierarchy and a wide range of applications. However, the weights of indices are usually affected by subjectiveness. Zheng [
12] evaluated three typical remote sensing tasks using the analytic hierarchical process (AHP). Chen [
13] constructed an evaluation indicator system to describe the target feature detection ability of satellites, where the weight parameters are obtained from the expert evaluation. Liu [
14] utilized the AHP and the availability dependability capability (ADC) model to evaluate the comprehensive effectiveness of the earth observation satellite cluster. While the simulation method can consider more factors of complex systems and environments, it also requires the model to be highly accurate. Zhang [
4] built a satellite observation effectiveness evaluation model based on the availability capacity profitability (ACP) framework. Tang [
15] used the Satellite Tool Kit (STK) and C++ to build a nanosatellite constellation model and evaluated its military effectiveness. As one of the four branches mentioned above, the simulation method can compute the evaluation results presented in various conditions, solving the evaluation problem of the complex remote sensing satellite cluster effectiveness with good applicability [
9].
The main challenge of using the simulation method to evaluate the remote sensing satellite cluster is the lack of model accuracy [
9]. The satellite cluster is a complex and highly comprehensive system. Multiple physical fields, including mechanics, electricity, thermodynamics, optical, and magnetism, are coupled [
16,
17]. The remote sensing satellite clusters are usually used to observe three typical targets, which are point targets, regional targets, and moving targets [
18]. Establishing the observation scene of the moving targets is more complex than the others, since additional aspects must be considered. Moving targets have time sensitivity and position uncertainty, requiring multi-satellite cooperation to discover, identify, confirm, and track them sequentially. The uncertainty of the observation results is mostly driven by factors, including resolution, light, cloud, and climate [
18]. The traditional simulation evaluation modeling only considers a few factors, which are the satellite orbit, attitude, and optical payload visible model [
4,
9]. Nonetheless, apart from lacking resource constraint models, such as the power and computer storage, it also does not consider the impact of imaging quality on the mission status. Hence, to describe the complex coupling relationships of a remote sensing satellite cluster, a high-fidelity simulation model must be established [
19].
Regarding the construction of indicator systems, most remote sensing satellite evaluation indicators only consider the time resolution (e.g., the revisit time and coverage time) and spatial resolution (e.g., the Ground Sampling Distance (GSD) and percentage of area coverage) [
9,
12]. Even though the aforementioned indicators can reflect the satellite’s availability to observe the target under ideal conditions, they are not capable of reflecting the effectiveness of the satellite’s actual mission process. Moreover, the establishment of an indicator system is generally proposed by experts, where each indicator in distinct systems might be inevitably correlated, thereby defying the principle of hierarchy and independence [
20].
Furthermore, a high-fidelity simulation evaluation model requires heavy computation, especially when the cluster contains numerous satellites [
21]. As a consequence, the time-consuming simulation limits the iteration speed of the design stage and the decision-making speed of the use stage [
22]. A common approach to overcoming this problem is to establish a machine learning model. Machine learning technology has lately been applied to the theoretical studies of aerospace missions [
23], including aircraft design [
20,
22], mission planning [
1,
24], and attitude control [
25,
26]. In those cases, machine learning has demonstrated its capability of learning complicated functions and responding quickly.
In this paper, by applying machine learning to the effectiveness evaluation of remote sensing satellite clusters on moving targets, a real-time evaluation model architecture is proposed. Firstly, we establish a multi-physical field coupling simulation model of the satellite cluster, which considers the repercussions of multiple satellite resource constraints and the uncertainty of imaging quality on the observation results. Secondly, we develop an indicator system to evaluate the effectiveness of satellite cluster observations on moving targets. A set of independent indicators is then filtered out through correlation analysis. Thirdly, neural networks are trained with high-fidelity simulation evaluation data. Neural networks of different hidden layers, neurons, and activation functions are trained to determine the optimized model, which can output effectiveness evaluation results in real time.
The remainder of the paper is organized as follows. In
Section 2, the architecture of the real-time effectiveness evaluation model is presented. In
Section 3, the high-fidelity model construction method is explained. In
Section 4, the construction and screening process of the evaluation indicator system is provided. In
Section 5, the neural network training method is presented. In
Section 6, the experiments and results are described. In
Section 7, we discuss the validity of the method proposed and conclude the paper.
2. Architecture of the Real-Time Satellite Cluster Effectiveness Evaluation Model
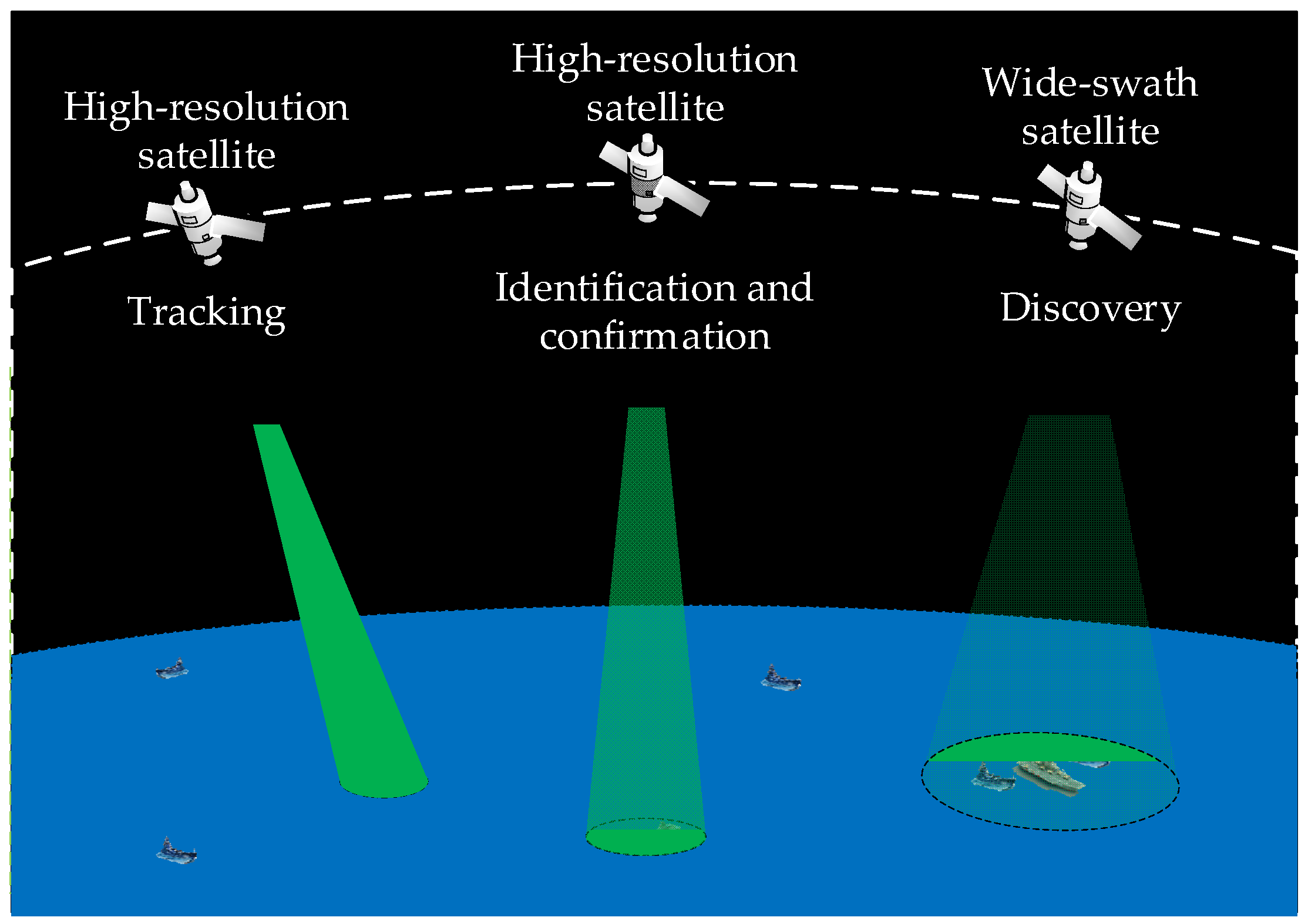
The scene of the satellite cluster observing the moving targets is illustrated in
Figure 1. A satellite cluster may include different satellites, such as wide-swath satellites and high-resolution satellites. A variety of satellites in the satellite cluster collaborate to conduct the census and comprehensive investigation of the target. Wide-swath satellites are utilized to search for and discover targets in a specified area. High-resolution satellites are intended for identification, confirmation, and status tracking of discovered targets.
To evaluate the moving target’s observation effectiveness of the remote sensing satellite cluster, a real-time evaluation model architecture is designed, as shown in
Figure 2.
The multi-physical field coupling simulation model of remote sensing satellite clusters is described in
Section 3. The model is defined as
where
is the simulation result data and
is the simulation time.
consists of simulation condition parameters, which can be expressed as
The simulation condition parameters mainly consist of six parts, which are attitude determination and control subsystem (ADCS) parameters , the power subsystem (POWER) parameters , the telemetry/telecommand and data transmission subsystem (TTC&DT) parameters , the payload subsystem parameters , the task environmental parameters , and the target parameters , respectively.
The moving target observation effectiveness indicator system of the satellite cluster is established in
Section 4, which can be expressed as
The effectiveness evaluation model based on the simulation result data can be expressed as
In
Section 5, the neural network evaluation model is trained, which can be expressed as
where
contains the factors with which the
th stakeholder is concerned.
is the corresponding neural network evaluation model. For different stakeholders, such as the designers, manufacturers, and users,
contains different elements. On the one hand, the primary concern of the designers and manufacturers is the composition and structure of the remote sensing satellite cluster. On the other hand, the fundamental interest of the users is to what extent different task environments and target parameters impact the overall system efficiency.
With the rapid forward propagation process of the neural network, the calculation of the satellite cluster effectiveness indicators can be greatly accelerated. The neural network model error of the
th indicator can be expressed as
3. Establishing the Multi-Physical Field Coupling Model of the Remote Sensing Satellite Cluster
In this section, the function
of calculating
according to
and
is established. The function is realized via a numerical simulation based on the high-fidelity model, which should be the multi-physical field coupled. The multi-physical coupling relationship is illustrated in
Figure 3.
The forces and moments of celestial bodies, such as Earth, the Sun, and the Moon, are coupled with the satellites’ orbits and attitudes. The ADCS controls the satellite’s position and attitude. They have coupling relationships with the solar array attitude of the POWER, the communication link of the TTC&DT, and the range of the payload’s field of view. Sunlight and the solar array within the POWER are coupled. The remaining battery capacity of POWER is mutually coupled with the power consumed by other subsystems. TTC&DT is coupled with other subsystems by sending and receiving commands and data. The payload’s coverage capability is coupled with the satellite’s orbit and attitude. At the same time, it is also bound by resources, such as power, storage, and data transmission. The payload imaging quality is affected by factors, such as resolution, climate environment, cloudiness level, and lighting conditions, which in turn affect the target detection probability.
The typical simulation evaluation modeling only considers a few factors, which are the satellite orbit, attitude, and optical payload visible model. Nonetheless, apart from lacking resource constraint models, such as the power and computer storage, it also does not consider the impact of imaging quality on the mission status. On the basis of the existing models, this paper established three supplement models, which are (1) the power subsystem model, (2) the optical payload’s target detection probability model, and (3) the satellite cluster mission allocation model that considers the entire satellite’s resource constraints.
3.1. The Power Subsystem Model
The power subsystem model includes the device power consumption model, the solar array power supply model, and the battery charge and discharge model.
(1) The device power consumption model.
The total power consumption
is calculated as follows:
where
is the
th device,
, and
.
is denoted as the total number of devices. The state variable
is set to 1 when the device consumes electrical energy, or else it is set to 0.
is the power that the
th device consumes.
The on–off state of the devices on board are defined as
, and it can be obtained by
where
is the power management command from the Earth station, and
is the management command from the on-board computer.
Denote
as the current time and
as the simulation time step. The power management command of
can be obtained from
The power consumption
of each device is coupled with other subsystems, and it can be expressed as
where
is the state parameter of the
th device itself and
represents the state parameter affected by other subsystems, including the temperature, data transmission load, and data processing load.
(2) The solar array power-supply model.
The output power of the solar array is calculated as follows:
where
represents whether the satellite is in the Earth’s shadow,
is the comprehensive coefficient of the solar array,
is the solar constant,
is the area of the solar array,
is the photoelectric conversion efficiency of the solar array,
is the angle between the normal direction of the solar panel and the direction of sunlight,
is the solar array power temperature coefficient, and
is the difference between the standard temperature and the current working temperature of the solar array.
is calculated according to the sun vector
, the satellite position vector
, and the angle
between the two vectors; the formulas are as follows:
can be obtained from the solar vector
and the normal vector
of the solar panel, which can be expressed as
The temperature difference
is
where
is the current working temperature and
is the standard temperature of the solar array.
(3) The battery charge and discharge model.
When the output power of the solar array exceeds the sum of total device power consumption and battery charge power, the regulator consumes the surplus power. The surplus power can be calculated by
where
is the maximum charging power of the battery and
is the power consumed by the regulator.
The battery is charged only if the output power of the solar array is greater than that of the on-board devices and the current battery capacity is below its maximum value, in which case
. On the contrary, the battery is discharged if the electric power of the solar array is less than that of the on-board devices and the current battery capacity is above its minimum value, in which case
. The battery power is defined as
where
is the minimum capacity of the battery and
is the maximum capacity.
The battery capacity of
can be expressed as
where
is the battery charging coefficient and
is the battery discharge coefficient.
3.2. The Optical Payload Model
The optical payload model consists of two parts: the optical coverage model and the target detection probability model. The coverage state
can be obtained from the optical coverage model [
9], where
is the target number and
is the task number of the
th target. The target detection probability is affected by factors, including the satellite imaging resolution, target size, light condition, cloud level, and visibility level. The detailed model is described as follows:
The resolution of the satellite optical payload is
where
is the pixel size,
is the focal length, and
is the vector of position difference from satellite to the target in the inertial frame.
The 2-D criterion (number cycles)
is generated by
where
is the feature size of the target,
is the length of the target, and
is the width of the target.
The target static detection probability is defined as [
27]
where
is the number of cycles corresponding to a 50% detection probability. The
is set to 0.75, 3, 6, 1.5 for the discovery, identification, confirmation, and tracking tasks, respectively.
The solar altitude angle is calculated as
The light factor is defined as
The cloud factor is generated by [
28]
where
is the cloud level,
,
.
The visibility factor is generated by [
28]
where
is the visibility level,
,
.
The target discovery probability can be derived from the product of static detection probability and the other three factors; it can be expressed as
where
is the target number and
is the task number of the
th target.
According to the target detection probability, it is possible to succeed and fail in a single observation mission. Thus, the simulation results may be different, given the same simulation condition. The task status is defined as follows:
Finally, the status and the end time of each task are recorded, including the following items:
(1) The time series of discovery tasks is recorded as , where . is the total discovery task number of the th target.
(2) The time series of identification and confirmation tasks is recorded as , where . is the total confirmation task number of the th target.
(3) The time series of successful tracking tasks is recorded as , where . is the total tracking task number of the th target.
(4) The time series of losing the targets is recorded as , where . is the total lost counts of the th target. The is recorded when the simulation starts or the tasks of the target fail twice in a row.
3.3. The Satellite Cluster Mission Allocation Model
The moving target observation mission can be divided into four tasks, which are discovery, identification, confirmation, and tracking. The discovery task refers to the scanning and discovery of regional targets when the potential area of the target is known, but the specific location is not. The identification and confirmation tasks refer to the identification of the target type and model when the approximate target location has been found. The tracking task refers to the continuous tracking of the target when the specific model of the target has been confirmed. The discovery task is generally completed by satellites with a low resolution and a wide field of view. As for the identification, confirmation, and tracking tasks, they are typically accomplished by satellites with a high resolution but a narrow field of view.
(1) High-resolution satellites mission allocation model.
The mission allocation steps for the identification, confirmation, and tracking tasks are designed as
Figure 4, where
is the target index and
,
is the total number of the targets.
is the satellite index and
,
is the total number of satellites.
Step 1: obtain the planning current time
and planning period
, then catalog the discovered targets.
where
represents the set of the
th target’s state information, which comprises the target index; the latest observation state; the latest observation time; the latest identified type and model; and the latest positioning longitude, latitude, speed, and course angle.
Step 2: within a planning cycle , the positions of the targets are determined by their latest observed position and speed.
Step 3: the observation time window of all satellites for all targets during the planning period
is calculated. The observation time window of satellite
on target
is defined as [
,
] [
1].
Step 4: the mission profit for each target is presented as
where
is the current time,
is the last observed time of the
th target, and
is the time coefficient. The value of
is set to 0.001.
Step 5: the total observation cost of each satellite to the observable target is calculated, including the time cost, power consumption cost, and storage consumption cost.
The power consumption cost is
where
,
,
are the average powers of the whole satellite during the imaging process, the data transmission process, and the attitude maneuver process, respectively.
is the comprehensive coefficient denoting the ratio of remote sensing payload data rate to the data transmission rate.
and
are the start and end times of the attitude maneuver, respectively, which can be achieved according to the start time of the time window, the expected angle of the attitude maneuver, the maximum angular velocity and angular acceleration of the satellite attitude maneuver, and the stabilization time of the attitude maneuver [
1].
The storage consumption cost is defined as
where
is the remote sensing payload data rate.
The total observation cost is the product of the above three costs, which is expressed as
Step 6: allocate the missions to the satellites. The most profitable mission among the remaining missions is chosen and allocated to the satellite that has the lowest cost to fulfill that mission while satisfying the constraints of attitude maneuver, fixed storage, or power supply. The mission’s allocation process loops until all the missions are completed.
(2) Wide-swath satellites mission allocation model.
The allocation process of the discovery stage is similar to that of the identification, confirmation, and tracking stages mentioned above, with two main differences.
The first difference is the target cataloging. As shown in
Figure 5, the potential emergence area of the target is meshed by a 1° × 1° grid of longitude and latitude, and the center of each grid is regarded as a “target”. The square boundaries of the potential area are determined by the following method. The target is located at the left boundary of the potential area at time
. Meanwhile, the right boundary of the potential area can be calculated according to the maximum speed of 30 knots (15.43 m/s) away from the area’s left boundary.
The second difference is the observation profit of the grid target. The profit is calculated as follows:
where
is the current time and
is the last observed time of the
th grid.
4. The Effectiveness Evaluation Indicator System
In this section, we propose an evaluation indicator system of moving target observation performance to judge the effectiveness of satellite cluster observation tasks. The evaluation indicator system is screened through correlation analysis to form an independent indicator set. The following describes the methods for developing and filtering the effectiveness evaluation indicator system.
4.1. The Construction of the Evaluation Indicator System
The moving target observation effectiveness indicator system considers three abilities: search and discovery, identification and confirmation, and continuous tracking. The details of the effectiveness evaluation indicator system are shown in
Figure 6.
The concept definition and mathematical description of the effectiveness indicators are as follows:
Denote as the target index and , as the total number of targets, as the total simulation time, and as the orbit period of the satellite cluster.
The target discovery probability is defined as the average probability that the targets are rediscovered within a single orbit period from the moment they are lost. The discovery response time is defined as the average time taken to rediscover a lost target. The calculation procedures are as follows:
Search and obtain the time
immediately after
. The time combination is recorded as
. The total number of discovery tasks
found within a single orbit period is generated by
where
is the
th loss of the
th target.
is the total lost number of the
th target and
.
is computed by
is computed by
- 2.
The identification and confirmation ability.
The target identification probability is defined as the average probability of identifying and confirming targets within a single orbit period since targets are discovered. The identification response time is defined as the average time taken from target discovery to identification. The calculation procedures are as follows:
Search and obtain the time
immediately after the time
. The time combination is recorded as
. The total number of successful confirmation tasks within a single orbit period since targets are detected is produced by
where
means the
th discovery of the
th target.
is the total discovery number of the
th target and
.
is computed by
is computed by
- 3.
The continuous tracking ability.
The tracking time percentage
is defined as the average ratio of total target tracking time to the total runtime.
where
means the
th tracking tasks of the
th target.
is the total tracking number of the
th target and
.
The average tracking interval
is defined as the average interval between two consecutive tracking tasks.
4.2. Evaluation Indicator Screening
The correlation of the indicator system is analyzed, and the indicators with strong correlations are then screened and eliminated. This results in an indicator system that satisfies the principles of hierarchy and independence. The steps for evaluation indicator screening are as follows:
Step 1: calculate the correlation coefficients between the parameters and build the coefficient matrix as
where
is the correlation coefficient of the indicators
and
, note that the value of the main diagonal is 1.
Step 2: screen out the highly correlated indicators. If , then indicators and are considered as highly correlated.
Step 3: calculate the sum of the linear correlation coefficients of indicators
and
with the other indicators.
Step 4: compare the values of and . Remove the indicator with the larger value and keep the indicator with the smaller value.
Step 5: continue Steps 2 to 4, until the indicator system is screened and formed.
5. Neural Network Evaluation Model Training
The refining of simulation model granularity enhances the simulation accuracy, but diminishes the simulation efficiency. Hence, it is challenging to meet the efficiency requirement of both the iterative optimization at the designer end and the real-time decision making at the user end. To provide a solution to this problem, a backpropagation (BP) neural network model is designed and trained for user stakeholders to realize the rapid evaluation of satellite cluster effectiveness. This section introduces sample generation and neural network training in detail.
5.1. Sample Creation
Each sample has an input and an output. The sample input is defined as
where
is the task start time,
and
are the longitude and latitude for the center of the initial area,
is the cloud level,
is the visibility level, and
is the total target number.
The sample output is the effectiveness indicator, which can be expressed as follows
A single-time simulation has high uncertainty resulting from the uncertainty of the random target initial parameters and the existence of the detection probability. Therefore, in order to generate reliable samples, each simulation case is performed multiple times to obtain the statistical value of the effectiveness indicators.
Denote as the total sample number and as the designated simulation times of a single sample. The complete sample set is generated after times of simulation. is the matrix corresponding to the th effectiveness indicator of the sample set, which has rows and seven columns.
5.2. Network Training
The neural network training process is divided into three different stages, which are the sample set division, network training, and performance testing, as shown in
Figure 7.
To begin, the sample sets are first normalized to and then split into a training set and a test set . Denote as the fraction of the sample training set. has rows whilst has rows.
Next, deep neural networks are trained in two steps, starting with the search for the best activation function, followed by the selection of the optimal network parameters. In the first step, a single hidden layer neural network traverses a set of activation functions to find several optimal activation functions. Those activation functions are softmax, tansig, logsig, elliotsig, poslin, purelin, radbas, satlin, satlins, and tribas. In the second step, a multi-hidden-layer neural network is implemented to determine the best combination of network structures and parameters. The neural network traverses the various combinations of network structures and parameters, including the number of hidden layers, the number of neurons in each layer, and the activation functions found in the first step.
Finally, the neural networks are tested on the training set and test set. Denote
and
as the outputs of the neural network in the training and test set, respectively. The mean squared error (MSE) of the
th effectiveness indicator can be expressed as
The average error of the training and test sets is defined as
7. Discussion and Conclusions
Remote sensing satellite clusters are usually comprised of wide-swath satellites and high-resolution satellites. They are playing an increasingly important role in the remote sensing field owing to their ability to complete census and detailed survey tasks for various targets. Due to the high cost of development and operation, remote sensing satellite clusters require quantitative effectiveness evaluation to support decision making in their entire life cycle. The effectiveness evaluation is usually based on simulation, but there is a conflict between accuracy and speed. Thus, the main goal of this paper was to present an architecture to achieve real-time high-quality effectiveness evaluation of remote sensing satellite clusters. The significant advantages of the architecture are as follows:
The simulation model in the architecture is a multi-physical field coupled. Apart from considering the repercussion of on-board resource constraints, it also considers the consequence of imaging’s uncertainty on the observation results. As compared with our proposed model granularity, the traditional coarse-grained model has a maximum error of more than 60%, which proves the effectiveness of the proposed model’s granularity.
A moving target observation effectiveness indicator system of the satellite clusters is established. In comparison with the current indicator system that contains accessibility indicators, such as coverage and resolutions, our proposed indicators can better reflect the effectiveness of the operation process. Moreover, we screened the indicator system through model-based quantitative analysis. This not only reduces the redundancy of the indicator system developed by the domain experts, but also increases the indicator system’s hierarchy and independence.
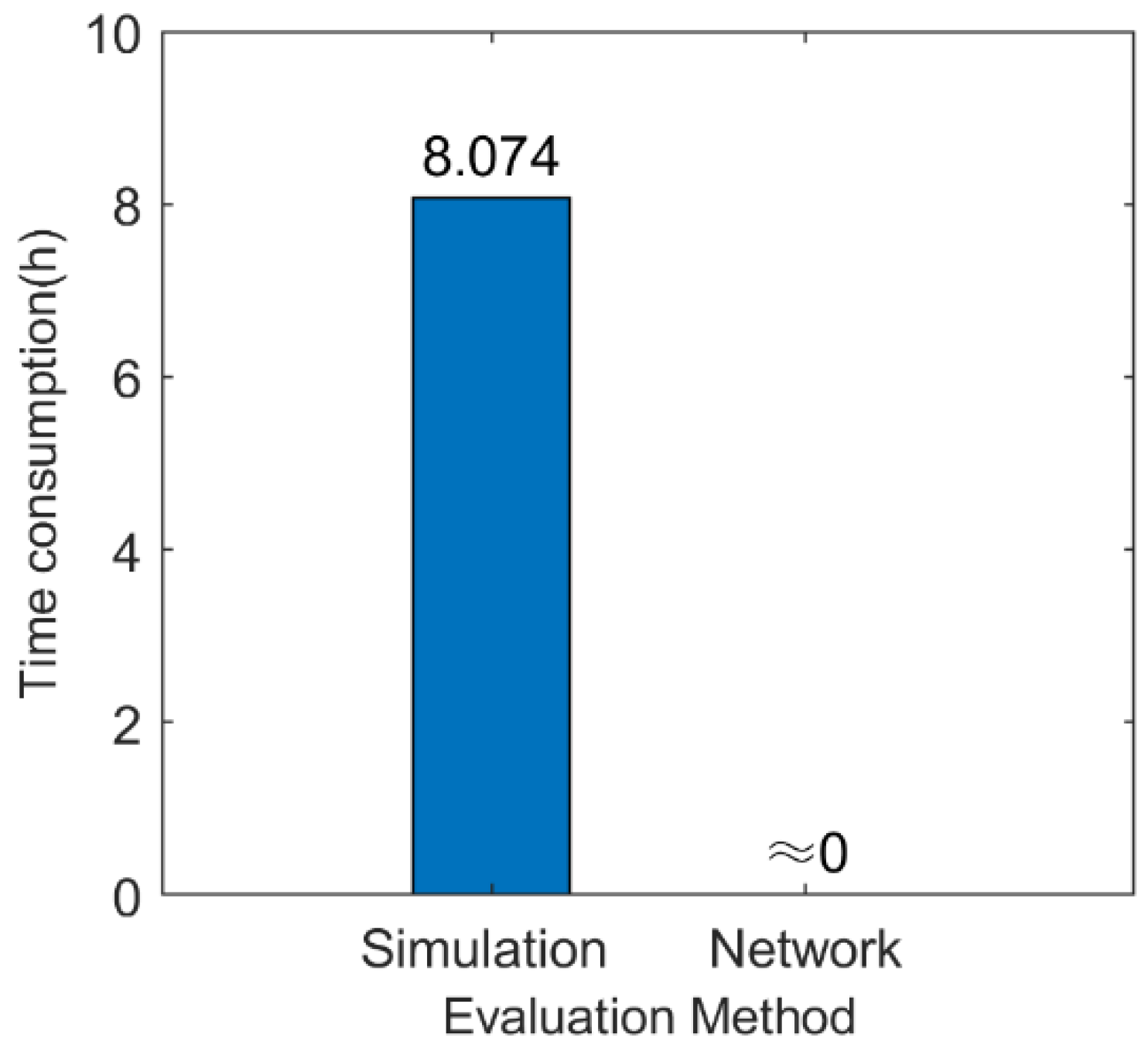
The neural network model can be trained in the architecture to evaluate the effectiveness with real-time computation. The architecture supports the finding of the best network structure and parameters, including the number of hidden layers, as well as the number of neurons and activation function in each layer. The result indicates that the neural network model not only achieves high accuracy on the training set, but also generalizes well on the test set. The conflict between the accuracy and speed is therefore resolved.
Our suggested method is not merely applicable to the effectiveness evaluation of remote sensing satellite clusters, but also single satellites and other types of satellites. Yet, our method has no obvious advantage over the coarse-grained model when only low accuracy is required. A coarse-grained model is more advantageous as it already has high computational efficiency. On the contrary, the sample creation method that we mentioned demands high computational resources.
Future research will be undertaken in two aspects, which are increasing the sample size and sample quality. This could be useful in reducing the computational resources needed in neural network training and enhancing the accuracy of the neural network. Regarding the sample size issue, due to the limitation of computing resources, only 1000 samples are created to be applied in our network training process. The error of networks might be reduced if more training samples are generated. In the future, the simulation model can be further optimized to acquire as many samples as possible with the same computational resources. For example, the relationship between effectiveness and model granularity can be thoroughly investigated, so as to refine the granularity of the important parts and reduce the granularity of the less important ones. In terms of sample quality, the noise in the samples will cause errors in the network evaluation results. It is a worthwhile research direction in the future to improve the training effect by preprocessing the samples.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}