
iArm: Design an Educational Robotic Arm Kit for Inspiring Students’ Computational Thinking

Abstract
:1. Introduction
1.1. Background
1.2. Purpose and Target of This Study
1.3. Contribution
- We designed a low-cost, open-source robotic arm and ancillary tools including a vacuum pump and conveyor belt for inspiring students’ computational thinking.
- We developed a three-stage iArm-based curriculum for students.
- We detailed three experiments in the curriculum to show how to cultivate students’ computational thinking by using this kit.
- We verified that the students computational thinking was improved during the curriculum in five dimensions including creative thinking, critical thinking, algorithmic thinking, problem-solving thinking, and cooperative thinking.
1.4. Paper Organization
2. Related Work
2.1. Educational Robotic Arm
2.2. Educational Applications of Robotic Arm
2.3. Computational Thinking
3. iArm Design
3.1. Overview of iArm
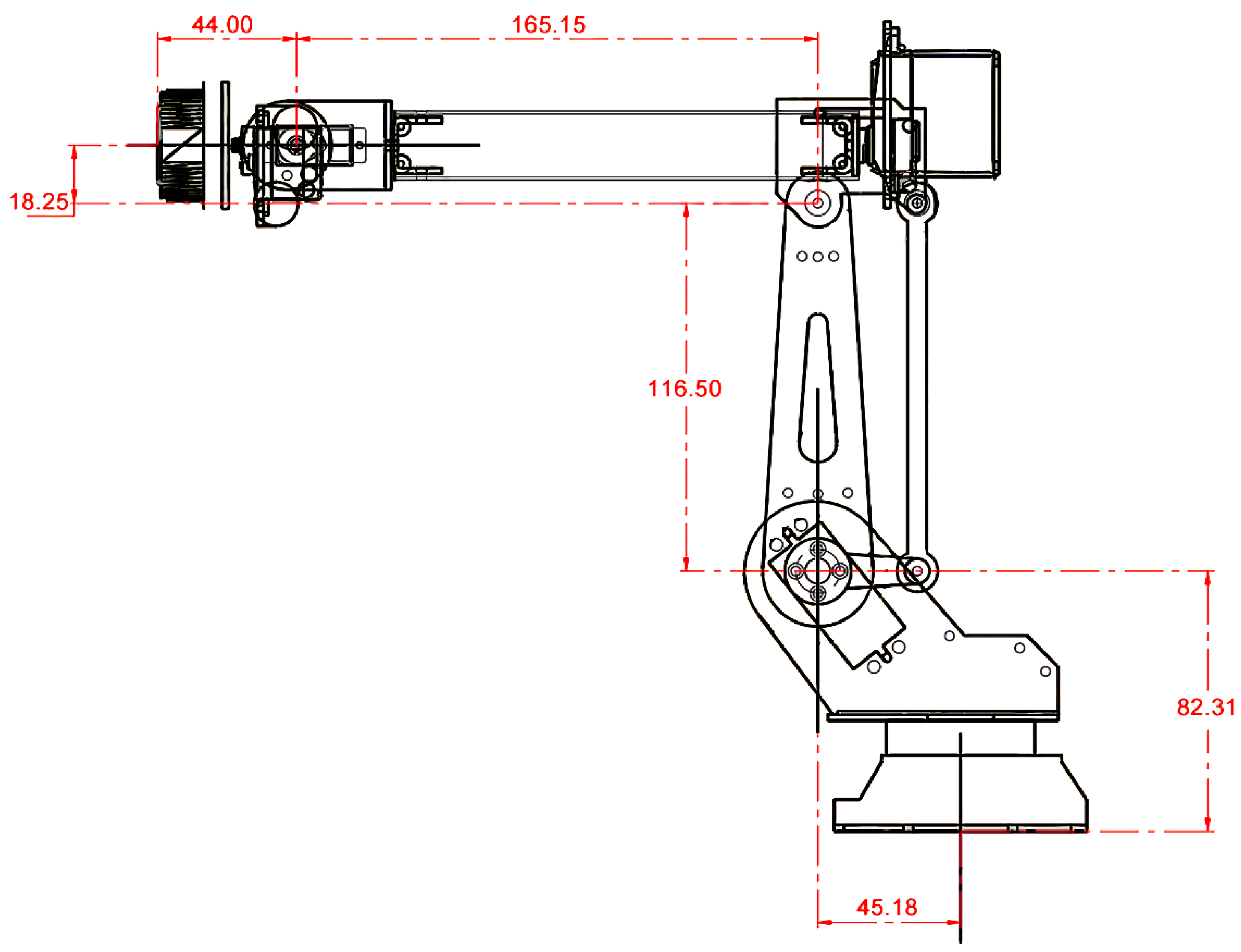
3.2. iArm Hardware
3.2.1. Drive Chassis
3.2.2. How iArm Works
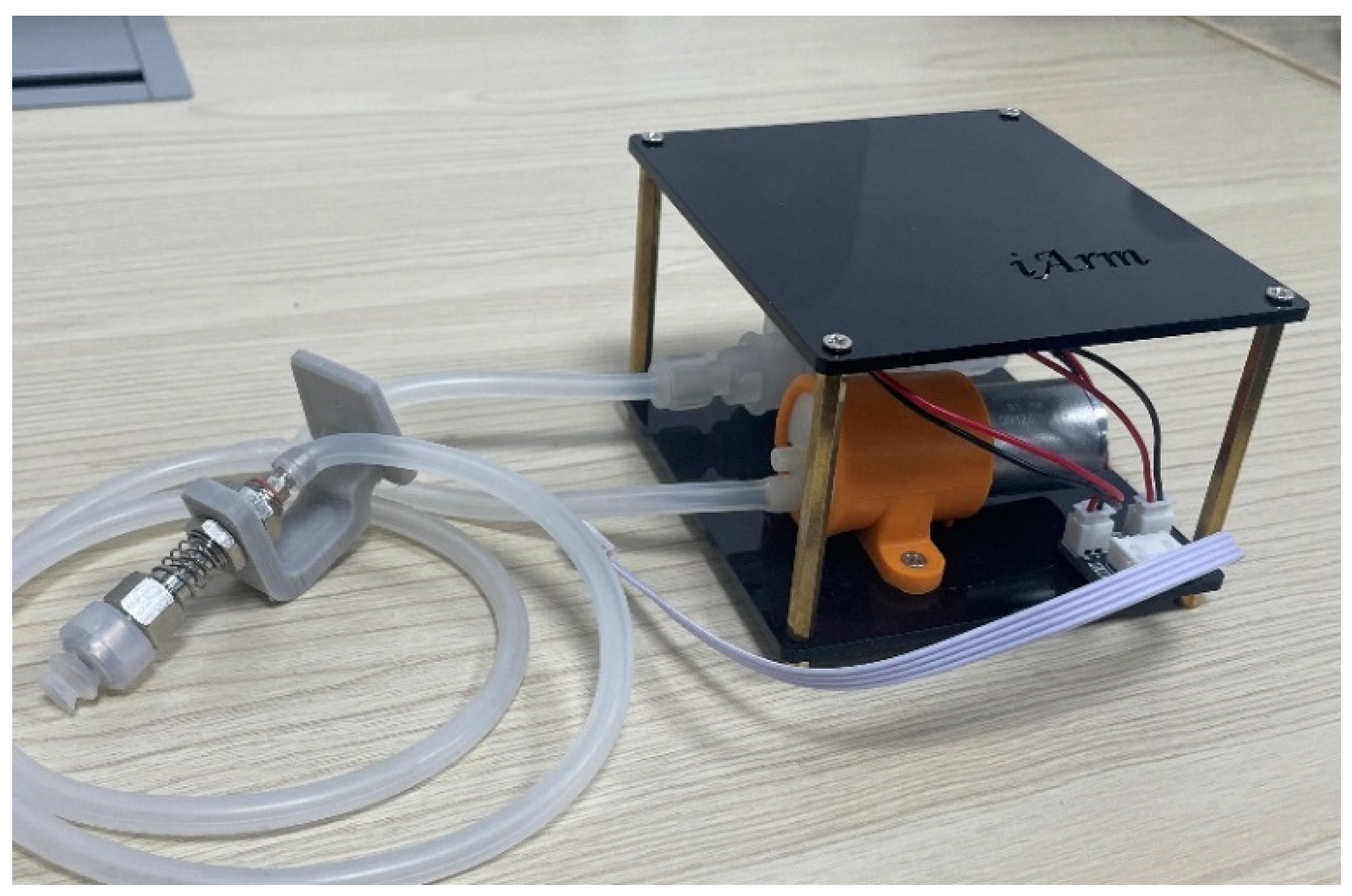
3.2.3. Vacuum Pump
3.2.4. Conveyor Belt
3.3. iArm Software
4. Results and Discussion: iArm in Education
4.1. Curriculum Schedule
4.1.1. Curriculum Objectives
4.1.2. Curriculum Content
- (a)
- The development and application of robotic arms
- (b)
- The concept of robotic arm degrees of freedom.
- (c)
- The hardware and client of iArm.
- (a)
- The status information of iArm
- (b)
- Coordinates of joints and end tools.
- (c)
- Learning mode and graphical programming
- (a)
- Perform linear motion through the endpoint system.
- (b)
- Perform oblique motion, making iArm write “7” or “Z” on the desktop.
- (a)
- Python programming
- (b)
- iArm Control in Linux
- (a)
- move_pose (x, y, z, roll, pitch, yaw)
- (b)
- shift_pose (axis, values)
- (a)
- Sequential structure
- (b)
- Loop structure
- (a)
- Industrial applications of palletizing robots
- (b)
- Analysis of iArm palletizing process
- (c)
- Function call: pick/place from the current position
- (a)
- How to move the block from place 1 to place 4?
- (b)
- How to move the blocks at places 1, 2, and 3 to place 4?
- (c)
- How to derive the coordinates at places 2, 3, and 4 from the coordinate at place 1?
- (d)
- Analyze the process of palletizing (pick and place).
- (a)
- pick_from_pose (x, y, z, roll, pitch, yaw)
- (b)
- place_from_pose (x, y, z, roll, pitch, yaw)
- (a)
- Sequential structure
- (b)
- Loop structure
- (a)
- Applications of writing robots
- (b)
- Analysis of iArm writing
- (c)
- Function call: pose/axis move
- (a)
- How to draw on the XY plane?
- (b)
- How to draw a line?
- (c)
- How to increase the “start” and “drop” actions?
- (d)
- How to draw two lines?
- (e)
- Thinking: How to make iArm dip ink automatically?
- (a)
- move_pose (x, y, z, roll, pitch, yaw)
- (b)
- shift_pose (axis, values)
- (a)
- Sequential structure
- (b)
- Loop structure
- (a)
- Computer color system
- (b)
- iArm vision pick
- (a)
- Machine learning
- (b)
- iArm candy pick principle
- (a)
- Robot Operating System (ROS)
- (b)
- Application mode of Industry 4.0
- (c)
- Sensor-related knowledge
- (a)
- Matlab modeling and simulation
- (b)
- D-H parameter of a 6-DOF robotic arm
- (a)
- Historical development of man-machine chess
- (b)
- iArm chess principle
- (a)
- How do robotic arms distinguish wood blocks with different colors?
- (b)
- How do robotic arms distinguish different types of candy?
- (c)
- How do robotic arms cooperate with intelligent cars?
- (d)
- How do robotic arms play chess with humans?
- (a)
- Sequential structure
- (b)
- Loop structure
- (c)
- Selection structure
4.2. Experiments of iArm
4.2.1. Experiment I: Vision Pick
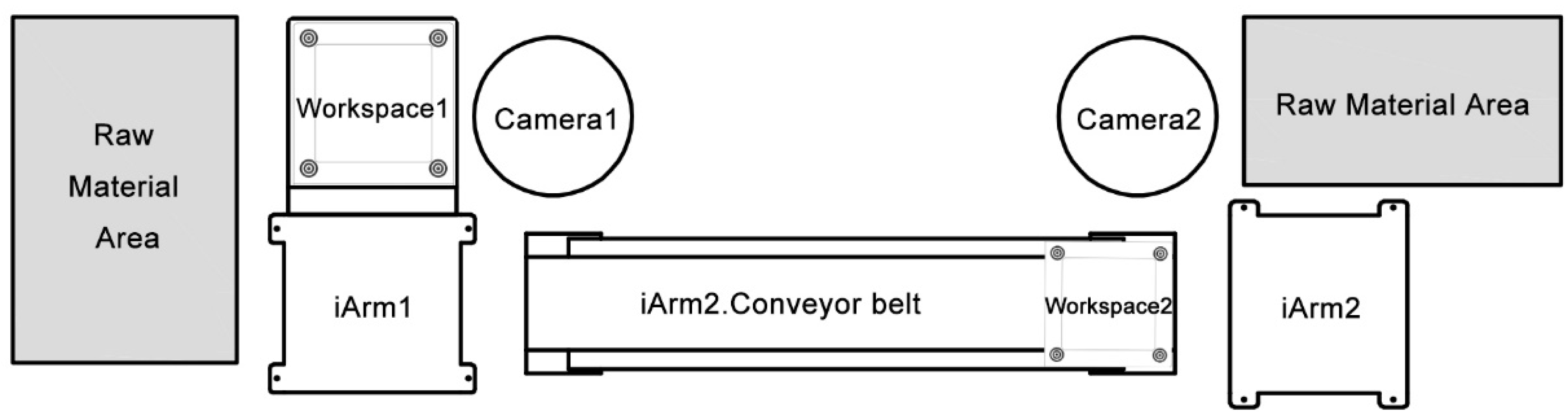
4.2.2. Experiment II: Multi-Arm Collaboration
4.2.3. Integrated Experiment: Industry 4.0 Simulation
4.3. Assessment of iArm in Education
4.3.1. Assessment of Students’ Work
4.3.2. Assessment of Computational Thinking Questionnaire
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Frangou, S.; Papanikolaou, K.; Aravecchia, L.; Montel, L.; Ionita, S.; Arlegui, J.; Pina, A.; Menegatti, E.; Moro, M.; Fava, N. Representative Examples of Implementing Educational Robotics in School Based on the Constructivist Approach. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots (Simpar 2008), Venice, Italy, 3–6 November 2008; pp. 54–65. [Google Scholar]
- Mondada, F.; Bonnet, E.; Davrajh, S.; Johal, W.; Stopforth, R. R2T2: Robotics to Integrate Educational Efforts in South Africa and Europe. Int. J. Adv. Robot. Syst. 2016, 13, 172988141665816. [Google Scholar] [CrossRef] [Green Version]
- Amsters, R.; Slaets, P. Turtlebot 3 as a robotics education platform. In International Conference on Robotics in Education (RiE); Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 170–181. [Google Scholar]
- Karalekas, G.; Vologiannidis, S.; Kalomiros, J. EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot. Sensors 2020, 20, 2469. [Google Scholar] [CrossRef]
- Danahy, E.; Wang, E.; Brockman, J.; Carberry, A.; Shapiro, B.; Rogers, C.B. LEGO-Based Robotics in Higher Education: 15 Years of Student Creativity. Int. J. Adv. Robot. Syst. 2014, 11, 27. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms: Children, Computers and Powerful Ideas; Basic Books: New York, NY, USA, 1993; ISBN 978-0-465-04674-4. [Google Scholar]
- Benitti, F.B.V. Exploring the Educational Potential of Robotics in Schools: A Systematic Review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Sophokleous, A.; Christodoulou, P.; Doitsidis, L.; Chatzichristofis, S.A. Computer Vision Meets Educational Robotics. Electronics 2021, 10, 730. [Google Scholar] [CrossRef]
- Nugent, G.; Barker, B.; Grandgenett, N.; Adamchuk, V.I. Impact of Robotics and Geospatial Technology Interventions on Youth STEM Learning and Attitudes. J. Res. Technol. Educ. 2010, 42, 391–408. [Google Scholar] [CrossRef]
- Chen, G.; Shen, J.; Barth-Cohen, L.; Jiang, S.; Huang, X.; Eltoukhy, M. Assessing Elementary Students’ Computational Thinking in Everyday Reasoning and Robotics Programming. Comput. Educ. 2017, 109, 162–175. [Google Scholar] [CrossRef] [Green Version]
- Doran, M.V.; Shelley-Tremblay, J.; Coleman, R.L.; McLaughlin, B. Enhanced Creativity and Problem Solving: An Interdisciplinary Approach. In Proceedings of the 16th World Multi-Conference on Systemics, Cybernetics and Informatics (WMSCI 2012), Orlando, FL, USA, 17–20 July 2012. [Google Scholar]
- Cañas, J.M.; Perdices, E.; García-Pérez, L.; Fernández-Conde, J. A ROS-Based Open Tool for Intelligent Robotics Education. Appl. Sci. 2020, 10, 7419. [Google Scholar] [CrossRef]
- Pedre, S.; De Cristóforis, P.; Caccavelli, J.; Stoliar, A. A Mobile Mini-Robot Architecture for Research, Education and Popularization of Science. J. Appl. Comput. Sci. Methods 2010, 2, 41–59. [Google Scholar]
- Nagai, K. Learning While Doing: Practical Robotics Education. IEEE Robot. Autom. Mag. 2001, 8, 39–43. [Google Scholar] [CrossRef]
- Nourbakhsh, I.R.; Crowley, K.; Bhave, A.; Hamner, E.; Hsiu, T.; Perez-Bergquist, A.; Richards, S.; Wilkinson, K. The Robotic Autonomy Mobile Robotics Course: Robot Design, Curriculum Design and Educational Assessment. Auton. Robots 2005, 18, 103–127. [Google Scholar] [CrossRef] [Green Version]
- Evripidou, S.; Georgiou, K.; Doitsidis, L.; Amanatiadis, A.A.; Zinonos, Z.; Chatzichristofis, S.A. Educational Robotics: Platforms, Competitions and Expected Learning Outcomes. IEEE Access 2020, 8, 219534–219562. [Google Scholar] [CrossRef]
- Cocota, J.A.N.; Fujita, H.S.; da Silva, I.J. A Low-Cost Robot Manipulator for Education. In Proceedings of the 2012 Technologies Applied to Electronics Teaching (TAEE), Vigo, Spain, 13–15 June 2012; pp. 164–169. [Google Scholar]
- Adinandra, S.; Marsiano, A.F.D. WayBotDu: A Low Cost Articulated Arm Platform for Education. In Proceedings of the 2016 International Conference on Computational Intelligence and Cybernetics, Makassar, Indonesia, 22–24 November 2016; pp. 91–96. [Google Scholar]
- Krasňanský, P.; Tóth, F.; Huertas, V.V.; Rohal’-Ilkiv, B. Basic Laboratory Experiments with an Educational Robotic Arm. In Proceedings of the 2013 International Conference on Process Control (PC), Strbske Pleso, Slovakia, 18–21 June 2013; pp. 510–515. [Google Scholar]
- Naves Cocota, J.A.; D’Angelo, T.; de Barros Monteiro, P.M.; Magalhães, P.H.V. Design and Implementation of an Educational Robot Manipulator. In Proceedings of the 2014 XI Tecnologias Aplicadas a la Ensenanza de la Electronica (Technologies Applied to Electronics Teaching) (TAEE), Bilbao, Spain, 11–13 June 2014; pp. 1–6. [Google Scholar]
- Neto, M.B.d.S.; de Mendonça, J.M.C.; de Sena, A.P.C. Development and Control of a Prototype Manipulator SCARA Type as Teaching Tool. IFAC-PapersOnLine 2015, 48, 209–213. [Google Scholar] [CrossRef]
- Hudy, W.; Lobur, M.; Pytel, K.; Gumula, S.; Kalwar, A.; Rusin, A. Proposal of a Five Degrees-of-Freedom Manipulator as an Example of Engineering Education. In Proceedings of the 2021 IEEE XVII International Conference on the Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 12–16 May 2021; pp. 153–156. [Google Scholar]
- Manzoor, S.; Ul Islam, R.; Khalid, A.; Samad, A.; Iqbal, J. An Open-Source Multi-DOF Articulated Robotic Educational Platform for Autonomous Object Manipulation. Robot. Comput.-Integr. Manuf. 2014, 30, 351–362. [Google Scholar] [CrossRef]
- Souza, M.R.S.B.; Tavares, J.J.P.Z.; Ribeiro, J.F.; Rocha, R.R. Design, Manufacture and Construction of a Wireless Robotic Arm for Educational Purposes. In Proceedings of the IEEE 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29–31 October 2015; pp. 376–380. [Google Scholar]
- Trehan, M.; Gupta, A.; Jung, S. Implementation of Joint Control of a 6-DOF Manipulator in ROS: KOBOKER for Robotics Education. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Seogwipo-si, Korea, 15–18 October 2019; pp. 1120–1123. [Google Scholar]
- DOBOT Magician Lite Robotic Arm-Programming Robot, Educational Robot. Available online: https://store.dobot.cc/products/dobot-magician-lite-robotic-arm (accessed on 26 March 2022).
- Qi, B.; Dong, Y.; Chen, L.; Qi, W.; Okawa, Y. The Impact of Robot Instruction to Education Informatization. In Proceedings of the 2009 1st International Conference on Information Science and Engineering, Nanjing, China, 26–28 December 2009; pp. 3497–3500. [Google Scholar]
- Wood, R.J. Robotic Manipulation Using an Open-Architecture Industrial Arm: A Pedagogical Overview [Education]. IEEE Robot. Autom. Mag. 2008, 15, 17–18. [Google Scholar] [CrossRef]
- Cappelleri, D.J.; Vitoroulis, N. The Robotic Decathlon: Project-Based Learning Labs and Curriculum Design for an Introductory Robotics Course. IEEE Trans. Educ. 2013, 56, 73–81. [Google Scholar] [CrossRef]
- Hernandez, J.L.; Roman, G.; Saldaña, C.K.; Rios, C.A. Application of the Challenge-Based Learning Methodology, as a Trigger for Motivation and Learning in Robotics. In Proceedings of the 2020 X International Conference on Virtual Campus (JICV), Tetouan, Morocco, 3–5 December 2020; pp. 1–4. [Google Scholar]
- Jaanus, M.; Udal, A.; Kukk, V.; Umbleja, K. Implementation of the Robot Arm in the Interactive Learning Environment. In Proceedings of the 2014 International Conference on Signals and Electronic Systems (ICSES), Poznan, Poland, 11–13 September 2014; pp. 1–4. [Google Scholar]
- Posadas, H.; Fernández, V.; Ugarte, I. Affordable, Easy-to-Use Robotic Arm Used in Hardware Description Languages Teaching. In Proceedings of the 2015 International Symposium on Computers in Education (SIIE), Setubal, Portugal, 25–27 November 2015; pp. 161–166. [Google Scholar]
- Pei, Z.; Nie, Y. Educational Robots: Classification, Characteristics, Application Areas and Problems. In Proceedings of the 2018 Seventh International Conference of Educational Innovation through Technology (EITT), Auckland, New Zealand, 12–14 December 2018; pp. 57–62. [Google Scholar]
- Chu, L.; Ting, Y.-L.; Tai, Y. Building STEM capability in a robotic arm educational competition. In Learning and Collaboration Technologies. Human and Technology Ecosystems, Proceedings of the 22nd HCI International Conference (HCII 2020), Copenhagen, Denmark, 19–24 July 2020; Zaphiris, P., Ioannou, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 408–421. [Google Scholar]
- Verner, I.; Cuperman, D.; Romm, T.; Reitman, M.; Chong, S.K.; Gong, Z. Intelligent Robotics in High School: An Educational Paradigm for the Industry 4.0 Era. In The Challenges of the Digital Transformation in Education, Proceedings of the 21st International Conference on Interactive Collaborative Learning (ICL2018), Kos Island, Greece, 25–28 September 2018; Auer, M.E., Tsiatsos, T., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 824–832. [Google Scholar]
- Miller, B.; Kirn, A.; Anderson, M.; Major, J.C.; Feil-Seifer, D.; Jurkiewicz, M. Unplugged Robotics to Increase K-12 Students’ Engineering Interest and Attitudes. In Proceedings of the 2018 IEEE Frontiers in Education Conference (FIE), San Jose, CA, USA, 3–6 October 2018; pp. 1–5. [Google Scholar]
- Cook, A.M.; Bentz, B.; Harbottle, N.; Lynch, C.; Miller, B. School-Based Use of a Robotic Arm System by Children with Disabilities. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 452–460. [Google Scholar] [CrossRef]
- Wing, J.M. Computational Thinking. Commun. ACM 2006, 49, 33–35. [Google Scholar] [CrossRef]
- ISTE CT Leadership Toolkit Booklet. Available online: https://cdn.iste.org/www-root/2020-10/ISTE_CT_Leadership_Toolkit_booklet.pdf (accessed on 26 March 2022).
- Information Technology Curriculum Standards for Senior High Schools. Available online: http://www.jwc.ecnu.edu.cn/_upload/article/files/f7/28/dc6ae6dc46faa43b343da2b24d7a/48a5042c-e998-4c17-beeb-8334e7853cd1.pdf (accessed on 26 March 2022).
- Lye, S.Y.; Koh, J.H.L. Review on Teaching and Learning of Computational Thinking through Programming: What Is next for K-12? Comput. Hum. Behav. 2014, 41, 51–61. [Google Scholar] [CrossRef]
- Montiel, H.; Gomez-Zermeño, M.G. Educational Challenges for Computational Thinking in K-12 Education: A Systematic Literature Review of “Scratch” as an Innovative Programming Tool. Computers 2021, 10, 69. [Google Scholar] [CrossRef]
- Huang, W.; Looi, C.-K. A Critical Review of Literature on “Unplugged” Pedagogies in K-12 Computer Science and Computational Thinking Education. Comput. Sci. Educ. 2021, 31, 83–111. [Google Scholar] [CrossRef]
- Ioannou, A.; Makridou, E. Exploring the Potentials of Educational Robotics in the Development of Computational Thinking: A Summary of Current Research and Practical Proposal for Future Work. Educ. Inf. Technol. 2018, 23, 2531–2544. [Google Scholar] [CrossRef]
- Garber, L. Robot OS: A New Day for Robot Design. Computer 2013, 46, 16–20. [Google Scholar] [CrossRef]
- Kang, Y.; Kim, D.; Kim, K. URDF Generator for Manipulator Robot. In Proceedings of the 2019 3rd IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 483–487. [Google Scholar]
- TB6600 Stepper Motor Driver SKU DRI0043-DFRobot. Available online: https://wiki.dfrobot.com/TB6600_Stepper_Motor_Driver_SKU__DRI0043 (accessed on 13 January 2022).
- Niryo One ROS Stack. Niryo Robotics. 2022. Available online: https://github.com/NiryoRobotics/niryo_one_ros (accessed on 12 February 2022).
- Eteokleous, N.; Nisiforou, E.; Christodoulou, C. Creativity thinking skills promoted through educational robotics. In Educational Robotics in the Context of the Maker Movement; Moro, M., Alimisis, D., Iocchi, L., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 57–68. [Google Scholar]
- Sadykova, O.V.; Il’bahtin, G.G. The Definition of Algorithmic Thinking. In Proceedings of the International Session on Factors of Regional Extensive Development (FRED 2019), Irkutsk, Russia, 27 May–1 June 2019. [Google Scholar]
- Liu, H.; Spector, J.M.; Ikle, M. Computer Technologies for Model-Based Collaborative Learning: A Research-Based Approach with Initial Findings. Comput. Appl. Eng. Educ. 2018, 26, 1383–1392. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | αi | ai | di | θi | Offset |
|---|---|---|---|---|---|
| L1 | pi/2 | 0.0452 | 0.082 | θ1 | 0 |
| L2 | 0 | 0.1165 | 0 | θ2 | pi/2 |
| L3 | pi/2 | 0.01825 | 0 | θ4 | 0 |
| L4 | pi/2 | 0 | 0.165 | θ4 | 0 |
| L5 | −pi/2 | 0 | 0 | θ5 | 0 |
| L6 | 0 | 0 | 0.044 | θ6 | 0 |
| Development Dimensions | Objectives Content |
|---|---|
| Problem Abstraction | Be able to specify the objectives and conditions of a problem for a given task; be able to abstract the problem, decompose it into some executable operational steps, and give concrete processes and methods for solving the problem. |
| Algorithm Design | Analyze and extract data, design an algorithm based on needs, describe the algorithm using a flowchart, and program with the appropriate algorithm. |
| Iteration Optimization | Use iterative thinking to analyze solutions to problems with some degree of optimization and be able to evaluate its rationality and completeness, and analyze the possibilities for optimization or improvement of the solution. |
| Test and Correction | Find bugs in the process of trying, verifying, and modifying, and then fix them by debugging the code. |
| Generalization and Application | Generate solutions to problems and apply them to other relevant problems in real life. |
| Stage | Aspect | Details |
|---|---|---|
| Preliminary stage (25 marks) | Abstraction (5 marks) | Control variables to realize the basic motion of the robotic arm (linear/ oblique motion). |
| Algorithm (5 marks) | Algorithm implementation:
| |
| Optimization (5 marks) | Loop structure “repeat … times, do …” | |
| Test (5 marks) | Run the program, observe the movement of iArm, and modify the code according to the actual error. | |
| Generalization (5 marks) | Summarize three algorithms and two programming methods for controlling manipulator motion. | |
| Intermediate stage (25 marks) | Abstraction (5 marks) | Plan the path to realize simple applications of robotic arms (palletizing, writing) |
| Algorithm (5 marks) | Algorithm implementation:
| |
| Optimization (5 marks) | Create variables and assign values; loop structure (while) | |
| Test (5 marks) | Run the program, observe the painting and palletizing, and modify the code according to the actual error. | |
| Generalization (5 marks) | Summarize methods of multiple path planning and be able to plan different movements according to the task requirements. | |
| Advanced stage (25 marks) | Abstraction (5 marks) | Introduce a vision module to realize the artificial intelligence application of robotic arms (Color-based pick) |
| Algorithm (5 marks) | Algorithm implementation:
| |
| Optimization (5 marks) | Selection structure “if …” | |
| Test (5 marks) | Run the program, observe the effects of vision pick, and modify the code according to the actual error. | |
| Generalization (5 marks) | Summarize the method of picking different color blocks and be able to plan different paths according to task requirements. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, C.; Zhou, H.; Ye, W.; Gu, X. iArm: Design an Educational Robotic Arm Kit for Inspiring Students’ Computational Thinking. Sensors 2022, 22, 2957. https://doi.org/10.3390/s22082957
Zeng C, Zhou H, Ye W, Gu X. iArm: Design an Educational Robotic Arm Kit for Inspiring Students’ Computational Thinking. Sensors. 2022; 22(8):2957. https://doi.org/10.3390/s22082957
Chicago/Turabian StyleZeng, Chengze, Hong Zhou, Weiwei Ye, and Xiaoqing Gu. 2022. "iArm: Design an Educational Robotic Arm Kit for Inspiring Students’ Computational Thinking" Sensors 22, no. 8: 2957. https://doi.org/10.3390/s22082957