
Adaptive Pedestrian Stride Estimation for Localization: From Multi-Gait Perspective




Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Foundation
2.2. Adaptive Stride Segmentation Technique
2.3. Stride Gait Division Method
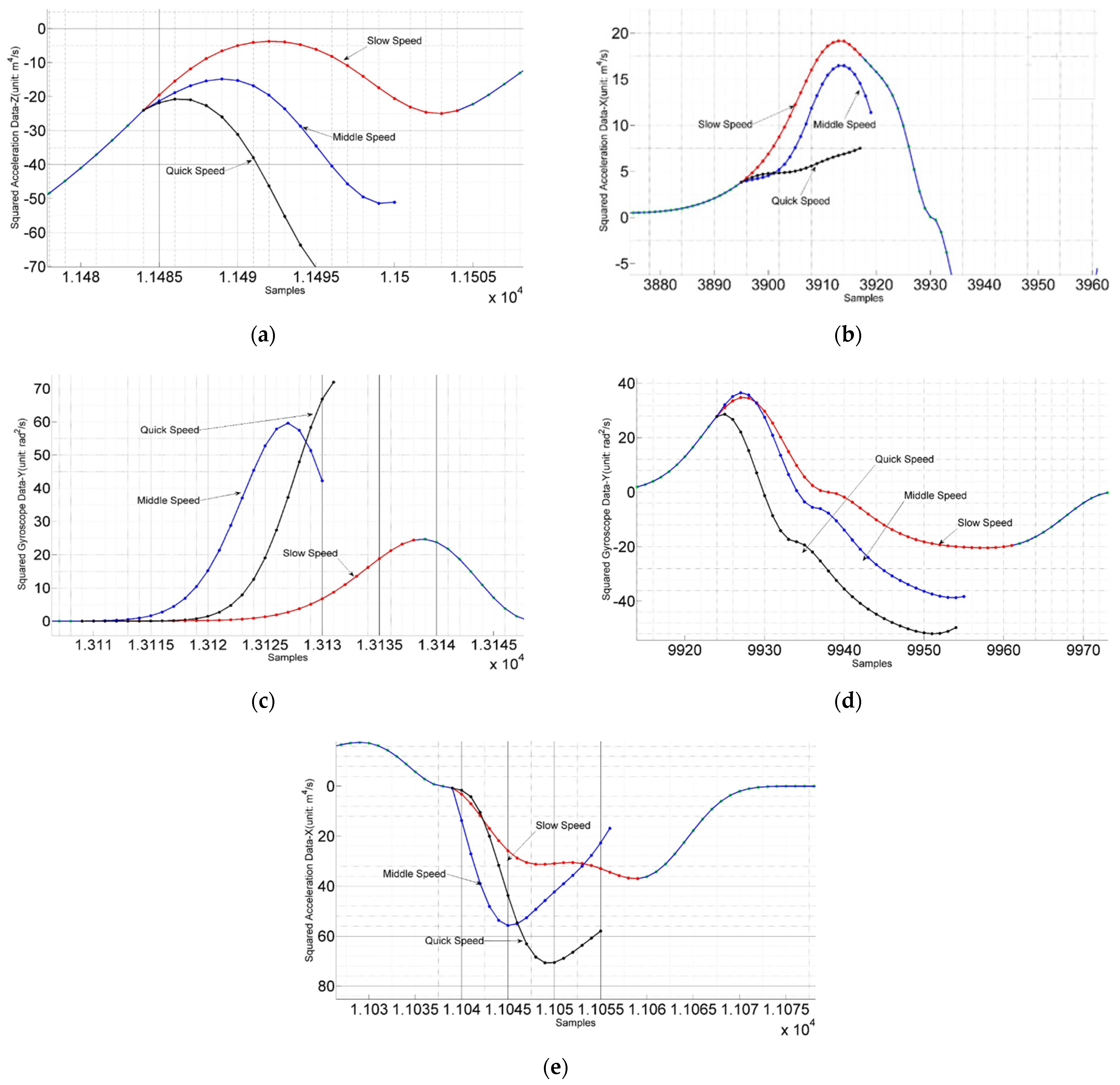
2.3.1. The Understanding of Gait Modes
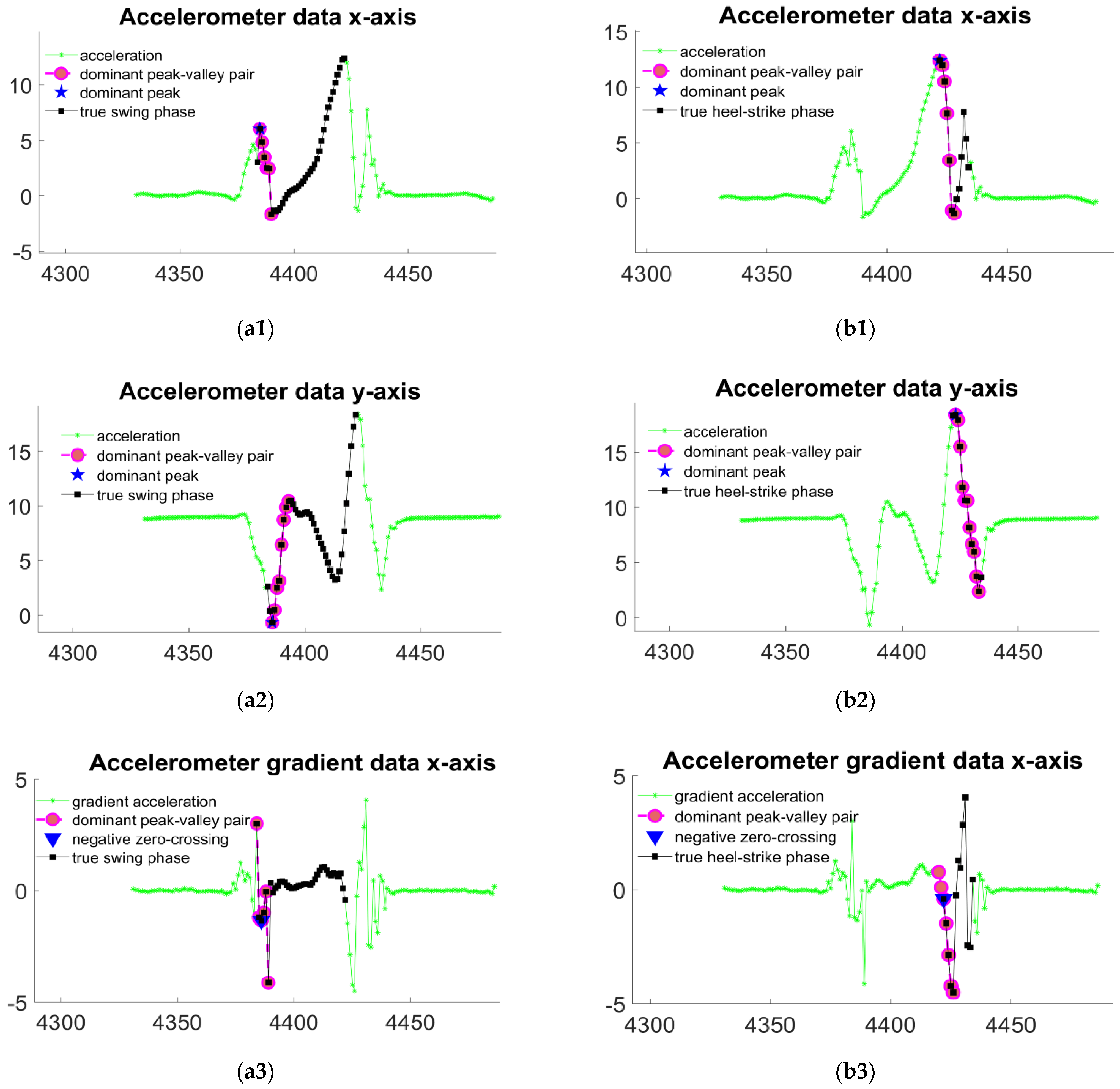
2.3.2. Recognizing Gait Boundaries Using Peak-Valley-Pairs
| Algorithm 1: Peak-points clustering pseudo code | |
| Input: [n_ last_stance_end, n_current_stance_beginning, ary_peaks] | |
| Output: [left_peaks, right_peaks} | |
| Initialize: center_0 = n_ last_stance_end, center_1 = n_current_stance_beginning, center_0_old = inf, center_1_old = inf, iter_num = 0; | |
| 1 | while iter_num < 50 do |
| 2 | iter_num++; |
| 3 | for point in ary_peaks do |
| 4 | if |
| 5 | left_peaks = [left_peaks; ]; |
| 6 | else |
| 7 | right_peaks = [right_peaks; ]; |
| 8 | end |
| 9 | center_0_old = center_0, center_1_old = center_1; |
| 10 | center_0 = mean(left_peaks), center_1 = mean(right_peaks); |
| 11 | if and |
| 12 | break; |
| 13 | else |
| 14 | continue; |
| 15 | end |
| 16 | return [left_peaks, right_peaks] |
2.4. Adaptive Stride Length Estimation
2.4.1. Dataset for Training Stride Length Estimation Models
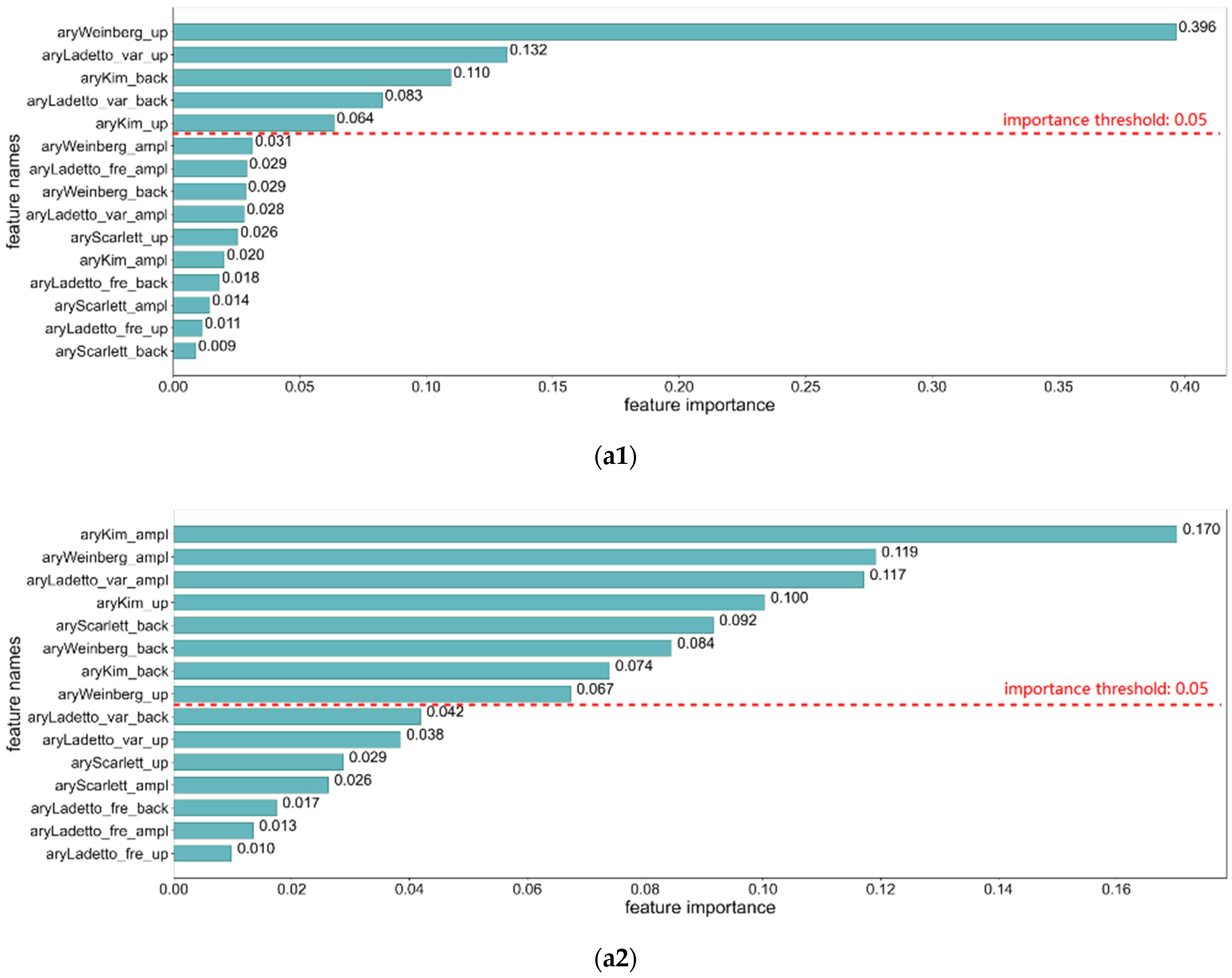
2.4.2. Data Preprocessing and Feature Selection
2.4.3. Stride Length Estimation Models
2.5. Metrics for Gait Phases Division and Step Length Estimation
3. Experiments and Results
3.1. Performance of Stride Segmentation Algorithm Based on SDATW
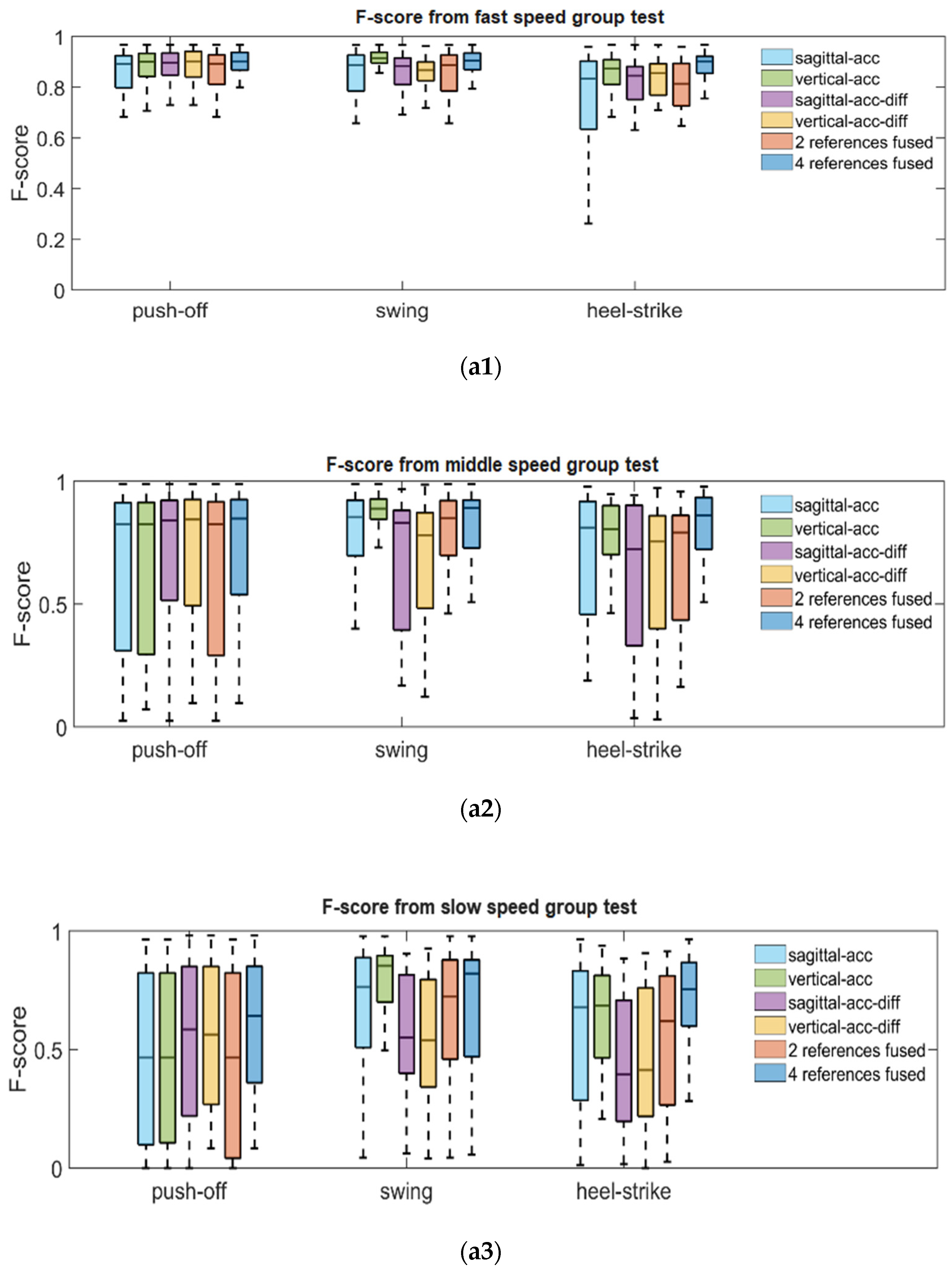
3.2. Separate Performance of Gait Segmentation Algorithms Using Different Reference Schemes
3.3. Performance Comparison with Existing Methods for Gati Segmentation Based on Foot Movement Data
3.4. Performance of Adaptive Stride Length Estimation Algorithms
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Xu, L.; Xiong, Z.; Zhao, R. An Indoor Pedestrian Navigation Algorithm Based on Smartphone Mode Recognition. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 831–835. [Google Scholar]
- Gang, H.-S.; Pyun, J.-Y. A Smartphone Indoor Positioning System Using Hybrid Localization Technology. Energies 2019, 12, 3702. [Google Scholar] [CrossRef] [Green Version]
- Abdelbar, M.; Buehrer, R.M. Pedestrian GraphSLAM Using Smartphone-Based PDR in Indoor Environments. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Angrisano, A.; Vultaggio, M.; Gaglione, S.; Crocetto, N. Pedestrian Localization with PDR Supplemented by GNSS. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–6. [Google Scholar]
- Ashraf, I.; Hur, S.; Shafiq, M.; Kumari, S.; Park, Y. GUIDE: Smartphone Sensors-Based Pedestrian Indoor Localization with Heterogeneous Devices. Int. J. Commun. Syst. 2019, 32, e4062. [Google Scholar] [CrossRef]
- Ciabattoni, L.; Foresi, G.; Monteriù, A.; Pepa, L.; Pagnotta, D.P.; Spalazzi, L.; Verdini, F. Real Time Indoor Localization Integrating a Model Based Pedestrian Dead Reckoning on Smartphone and BLE Beacons. J. Ambient Intell. Humaniz. Comput. 2019, 10, 1–12. [Google Scholar] [CrossRef]
- Huang, H.-Y.; Hsieh, C.-Y.; Liu, K.-C.; Cheng, H.-C.; Hsu, S.J.; Chan, C.-T. Multimodal Sensors Data Fusion for Improving Indoor Pedestrian Localization. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 283–286. [Google Scholar]
- Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schülein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef] [PubMed]
- Mao, Y.; Ogata, T.; Ora, H.; Tanaka, N.; Miyake, Y. Estimation of Stride-by-Stride Spatial Gait Parameters Using Inertial Measurement Unit Attached to the Shank with Inverted Pendulum Model. Sci. Rep. 2021, 11, 1391. [Google Scholar] [CrossRef]
- Rampp, A.; Barth, J.; Schülein, S.; Gaßmann, K.-G.; Klucken, J.; Eskofier, B.M. Inertial Sensor-Based Stride Parameter Calculation from Gait Sequences in Geriatric Patients. IEEE Trans. Biomed. Eng. 2015, 62, 1089–1097. [Google Scholar] [CrossRef]
- Kang, X.; Huang, B.; Qi, G. A Novel Walking Detection and Step Counting Algorithm Using Unconstrained Smartphones. Sensors 2018, 18, 297. [Google Scholar] [CrossRef] [Green Version]
- Kang, X.; Huang, B.; Yang, R.; Qi, G. Accurately Counting Steps of the Pedestrian with Varying Walking Speeds. In Proceedings of the 2018 IEEE SmartWorld, Ubiquitous Intelligence Computing, Advanced Trusted Computing, Scalable Computing Communications, Cloud Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 679–686. [Google Scholar]
- Wang, Y.; Chernyshoff, A.; Shkel, A.M. Error Analysis of ZUPT-Aided Pedestrian Inertial Navigation. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar]
- Wang, Y.; Shkel, A.M. Adaptive Threshold for Zero-Velocity Detector in ZUPT-Aided Pedestrian Inertial Navigation. IEEE Sens. Lett. 2019, 3, 7002304. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, S.; Ni, Z.; Qian, W.; Gu, C.; Cao, Z. Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance. Sensors 2020, 20, 1530. [Google Scholar] [CrossRef] [Green Version]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Nilsson, J.-O.; Skog, I.; Händel, P.; Hari, K.V.S. Foot-Mounted INS for Everybody—An Open-Source Embedded Implementation. In Proceedings of the Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 140–145. [Google Scholar]
- Fan, Q.; Zhang, H.; Sun, Y.; Zhu, Y.; Zhuang, X.; Jia, J.; Zhang, P. An Optimal Enhanced Kalman Filter for a ZUPT-Aided Pedestrian Positioning Coupling Model. Sensors 2018, 18, 1404. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Wang, Z.; Qiu, S.; Shen, Y.; Zhang, L.; Tang, K.; Fortino, G. Heading Drift Reduction for Foot-Mounted Inertial Navigation System via Multi-Sensor Fusion and Dual-Gait Analysis. IEEE Sens. J. 2019, 19, 8514–8521. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, Q.; Gao, M. Study on Application of Zero-Velocity Update Technology to Tracked Vehicle Inertial Navigation. In Proceedings of the 2020 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), Zhangjiajie, China, 18–19 July 2020; pp. 147–150. [Google Scholar]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications. Analog Devices AN-602 Appl. Note 2002, 2, 1–6. [Google Scholar]
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A Step, Stride and Heading Determination for the Pedestrian Navigation System. J. GPS 2004, 3, 273–279. [Google Scholar] [CrossRef] [Green Version]
- Ladetto, Q. On Foot Navigation: Continuous Step Calibration Using Both Complementary Recursive Prediction and Adaptive Kalman Filtering. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 22 September 2000; pp. 1735–1740. [Google Scholar]
- Enhancing the Performance of Pedometers Using a Single Accelerometer|Analog Devices. Available online: https://www.analog.com/en/analog-dialogue/articles/enhancing-pedometers-using-single-accelerometer.html (accessed on 7 January 2022).
- A Reliable and Accurate Indoor Localization Method Using Phone Inertial Sensors|Proceedings of the 2012 ACM Conference on Ubiquitous Computing. Available online: https://dl.acm.org/doi/abs/10.1145/2370216.2370280 (accessed on 26 December 2021).
- Kim, H. Wearable Sensor Data-Driven Walkability Assessment for Elderly People. Sustainability 2020, 12, 4041. [Google Scholar] [CrossRef]
- Xing, H.; Li, J.; Hou, B.; Zhang, Y.; Guo, M. Pedestrian Stride Length Estimation from IMU Measurements and ANN Based Algorithm. J. Sens. 2017, 2017, e6091261. [Google Scholar] [CrossRef] [Green Version]
- Hannink, J.; Kautz, T.; Pasluosta, C.F.; Barth, J.; Schülein, S.; Gaßmann, K.-G.; Klucken, J.; Eskofier, B.M. Mobile Stride Length Estimation with Deep Convolutional Neural Networks. IEEE J. Biomed. Health Inform. 2018, 22, 354–362. [Google Scholar] [CrossRef] [Green Version]
- Continuous Home Monitoring of Parkinson’s Disease Using Inertial Sensors: A Systematic Review. Available online: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0246528 (accessed on 7 December 2021).
- Mikos, V.; Yen, S.-C.; Tay, A.; Heng, C.-H.; Chung, C.L.H.; Liew, S.H.X.; Tan, D.M.L.; Au, W.L. Regression Analysis of Gait Parameters and Mobility Measures in a Healthy Cohort for Subject-Specific Normative Values. PLoS ONE 2018, 13, e0199215. [Google Scholar] [CrossRef] [Green Version]
- Lencioni, T.; Carpinella, I.; Rabuffetti, M.; Cattaneo, D.; Ferrarin, M. Measures of Dynamic Balance during Level Walking in Healthy Adult Subjects: Relationship with Age, Anthropometry and Spatio-Temporal Gait Parameters. Proc. Inst. Mech. Eng. H 2020, 234, 131–140. [Google Scholar] [CrossRef]
- Montes-Alguacil, J.; Páez-Moguer, J.; Jiménez Cebrián, A.M.; Muñoz, B.Á.; Gijón-Noguerón, G.; Morales-Asencio, J.M. The Influence of Childhood Obesity on Spatio-Temporal Gait Parameters. Gait Posture 2019, 71, 69–73. [Google Scholar] [CrossRef]
- Williams, D.S.; Martin, A.E. Gait Modification When Decreasing Double Support Percentage. J. Biomech. 2019, 92, 76–83. [Google Scholar] [CrossRef] [PubMed]
- McGrath, R.L.; Ziegler, M.L.; Pires-Fernandes, M.; Knarr, B.A.; Higginson, J.S.; Sergi, F. The Effect of Stride Length on Lower Extremity Joint Kinetics at Various Gait Speeds. PLoS ONE 2019, 14, e0200862. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tiwari, A.; Bajpai, R.; Khatavkar, R.; Gupta, M.; Garg, B.; Joshi, D. Exploring the Center of Pressure Shift Feedback at Heel Strike to Modulate the Step Length. In Proceedings of the 2022 International Conference for Advancement in Technology (ICONAT), Goa, India, 21–22 January 2022; pp. 1–5. [Google Scholar]
- Zhao, H.; Zhang, L.; Qiu, S.; Wang, Z.; Yang, N.; Xu, J. Pedestrian Dead Reckoning Using Pocket-Worn Smartphone. IEEE Access 2019, 7, 91063–91073. [Google Scholar] [CrossRef]
- Yu, T.; Jin, H.; Nahrstedt, K. ShoesLoc: In-Shoe Force Sensor-Based Indoor Walking Path Tracking. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3, 31:1–31:23. [Google Scholar] [CrossRef]
- Dynamic Time Warping. Information Retrieval for Music and Motion; Müller, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 69–84. ISBN 978-3-540-74048-3. [Google Scholar]
- Berndt, D.J.; Clifford, J. Using Dynamic Time Warping to Find Patterns in Time Series. KDD Workshop. 1994, pp. 359–370. Available online: https://www.aaai.org/Papers/Workshops/1994/WS-94-03/WS94-03-031.pdf (accessed on 21 February 2022).
- Huang, C.; Zhang, F.; Xu, Z.; Wei, J. The Diverse Gait Dataset: Gait Segmentation Using Inertial Sensors for Pedestrian Localization with Different Genders, Heights and Walking Speeds. Sensors 2022, 22, 1678. [Google Scholar] [CrossRef] [PubMed]
- Lu, W.; Wu, F.; Zhu, H.; Zhang, Y. A Step Length Estimation Model of Coefficient Self-Determined Based on Peak-Valley Detection. J. Sens. 2020, 2020, e8818130. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely Randomized Trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Zien, A.; Krämer, N.; Sonnenburg, S.; Rätsch, G. The Feature Importance Ranking Measure. In Machine Learning and Knowledge Discovery in Databases; Buntine, W., Grobelnik, M., Mladenić, D., Shawe-Taylor, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 694–709. [Google Scholar]
- Casalicchio, G.; Molnar, C.; Bischl, B. Visualizing the Feature Importance for Black Box Models. In Machine Learning and Knowledge Discovery in Databases; Berlingerio, M., Bonchi, F., Gärtner, T., Hurley, N., Ifrim, G., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 655–670. [Google Scholar]
- Du, P.; Bai, X.; Tan, K.; Xue, Z.; Samat, A.; Xia, J.; Li, E.; Su, H.; Liu, W. Advances of Four Machine Learning Methods for Spatial Data Handling: A Review. J. Geovis. Spat. Anal. 2020, 4, 13. [Google Scholar] [CrossRef]
- Wang, F.; Li, Z.; He, F.; Wang, R.; Yu, W.; Nie, F. Feature Learning Viewpoint of Adaboost and a New Algorithm. IEEE Access 2019, 7, 149890–149899. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2019, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Wang, W.; Lu, Y. Analysis of the Mean Absolute Error (MAE) and the Root Mean Square Error (RMSE) in Assessing Rounding Model. IOP Conf. Ser. Mater. Sci. Eng. 2018, 324, 012049. [Google Scholar] [CrossRef]
- Røislien, J.; Skare, Ø.; Gustavsen, M.; Broch, N.L.; Rennie, L.; Opheim, A. Simultaneous Estimation of Effects of Gender, Age and Walking Speed on Kinematic Gait Data. Gait Posture 2009, 30, 441–445. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height Range (cm) | Males | Females | Number of Strides (Speed Type) | Number of Gait Phases | ||
|---|---|---|---|---|---|---|
| 155~160 | - | 2 | fast | 142 | stance | 487 |
| middle | 159 | pushoff | 478 | |||
| slow | 171 | swing | 474 | |||
| full speed range | 472 | heel-strike | 474 | |||
| 160~165 | 2 | 3 | fast | 261 | stance | 1121 |
| middle | 337 | pushoff | 1100 | |||
| slow | 475 | swing | 1113 | |||
| full speed range | 1073 | heel-strike | 1110 | |||
| 165~170 | 2 | 2 | fast | 298 | stance | 1022 |
| middle | 324 | pushoff | 1013 | |||
| slow | 367 | swing | 1113 | |||
| full speed range | 989 | heel-strike | 998 | |||
| 170~176 | 4 | 1 | fast | 406 | stance | 1358 |
| middle | 440 | pushoff | 1353 | |||
| slow | 459 | swing | 1006 | |||
| full speed range | 1305 | heel-strike | 1378 | |||
| 176~180 | 2 | 1 | fast | 123 | stance | 408 |
| middle | 121 | pushoff | 399 | |||
| slow | 146 | swing | 400 | |||
| full speed range | 390 | heel-strike | 393 | |||
| 180~185 | 3 | - | fast | 150 | stance | 480 |
| middle | 114 | pushoff | 470 | |||
| slow | 197 | swing | 470 | |||
| full speed range | 461 | heel-strike | 465 | |||
| Model | Formulas (‘Step Length’ Has Been Simplified as ‘SL’) | |
|---|---|---|
| Weinberg | (1) | |
| Kim | (2) | |
| Ladetto | (3) | |
| Scarlett | (4) |
| Group Name (Walking Speed) | Group Volume (Strides) | msDTW | Zero-Velocity Based Method | SDATW |
|---|---|---|---|---|
| fast | 1380 | 0.813 | 0.8128 | 0.9337 |
| mid | 1495 | 0.818 | 0.8756 | 0.928 |
| slow | 1815 | 0.829 | 0.8849 | 0.9328 |
| all | 4690 | 0.822 | 0.8592 | 0.9304 |
| Gait Segmentation Method | Stance | Push-Off | Swing | Heel-Strike |
|---|---|---|---|---|
| FAU | 0.754 ± 0.022 | 0.786 ± 0.048 | 0.84 ± 0.029 | 0.761 ± 0.047 |
| WAVELET | 0.897 ± 0.018 | 0.729 ± 0.132 | 0.735 ± 0.128 | 0.717 ± 0.134 |
| PEAK-VALLEY PAIR (proposed) | 0.811 ± 0.018 | 0.748 ± 0.056 | 0.805 ± 0.037 | 0.819 ± 0.02 |
| Gait Segmentation Method | Stance | Push-Off | Swing | Heel-Strike |
|---|---|---|---|---|
| FAU | 0.601 ± 0.014 | 0.457 ± 0.03 | 0.679 ± 0.026 | 0.345 ± 0.012 |
| WAVELET | 0.706 ± 0.019 | 0.445 ± 0.078 | 0.686 ± 0.075 | 0.341 ± 0.031 |
| PEAK-VALLEY PAIR (proposed) | 0.638 ± 0.012 | 0.487 ± 0.017 | 0.697 ± 0.076 | 0.514 ± 0.01 |
| Estimation Model | RMSE | Distance | Distance Estimation Error | |||
|---|---|---|---|---|---|---|
| Reference (m) | Estimated (m) | Absolute (m) | Relative (%) | |||
| Whole Stride | SVR | 159.199 | 527.464 | 520.218 | 7.246 | 1.37 |
| SVR-Adaboost | 173.922 | 500.011 | 27.453 | 5.2 | ||
| Gait Predictions Fusion | SVR | 137.917 | 520.137 | 7.327 | 1.39 | |
| SVR-Adaboost | 151.933 | 517.453 | 10.011 | 1.9 | ||
| Estimation Model | Distance | Distance Estimation Error | |||
|---|---|---|---|---|---|
| Reference (m) | Estimated (m) | Absolute (m) | Relative (%) | ||
| Whole Stride | SVR | 501.2 | 473.882 | 27.318 | 5.45 |
| SVR-Adaboost | 456.749 | 44.451 | 8.87 | ||
| Gait Predictions Fusion | SVR | 524.671 | 23.471 | 4.68 | |
| SVR-Adaboost | 509.825 | 8.625 | 1.72 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Zhang, F.; Xu, Z.; Wei, J. Adaptive Pedestrian Stride Estimation for Localization: From Multi-Gait Perspective. Sensors 2022, 22, 2840. https://doi.org/10.3390/s22082840
Huang C, Zhang F, Xu Z, Wei J. Adaptive Pedestrian Stride Estimation for Localization: From Multi-Gait Perspective. Sensors. 2022; 22(8):2840. https://doi.org/10.3390/s22082840
Chicago/Turabian StyleHuang, Chao, Fuping Zhang, Zhengyi Xu, and Jianming Wei. 2022. "Adaptive Pedestrian Stride Estimation for Localization: From Multi-Gait Perspective" Sensors 22, no. 8: 2840. https://doi.org/10.3390/s22082840