1. Introduction
Over the past few years, global satellite navigation systems have undergone considerable development, both in the space segment and the user segment [
1]. For the completion of the BeiDou-3 positioning system, no fewer than 30 satellites were put into orbit within 2.5 years between 2017 and 2020 [
2]. To date, 110 satellites are operational in the four navigation systems, of which 99 are currently operational in MEO orbit for worldwide coverage: GPS (29), GLONASS (24), GALILEO (22) and BeiDou (24). The possibility to obtain the satellite positioning using dozens of visible satellites has, therefore, become a reality very quickly. On the user segment side, several classes of users have been created, which need to be distinguished as follows: high volume devices for the consumer market, safety and liability critical devices, high precision devices, timing devices. GNSS receivers are continually evolving to offer improved performances tailored to each class but, as reported in [
3], there is a trend towards using high-volume devices for professional applications. Indeed, dual frequency has not only become a strategic choice for high-end devices but is also entering the mid-range smartphone market.
To the best of our knowledge, at the time of writing, there are only three OEM receivers on the low-cost market, multi-frequency and multi-constellation: Septentrio SimpleRTK3B Pro (about 550 €), Bynav C1-8S (about 225 €) and u-blox ZED-F9P (approximately 175 €). All three can be used for absolute and relative RTK (Real-Time Kinematic) and NRTK (Network Real-Time Kinematic) positioning and may replace high-precision devices in typical land-surveying or geodetic applications, e.g., cadastral surveying, establishment of control points or even in research applications. Studies have been carried out during the last two years to evaluate the accuracy of the u-blox ZED-F9P, performing tests, usually devoted to hi-grade GNSS receivers and infrastructures [
4,
5,
6], in order to assess their limitations.
Tests were addressed to investigate the performances of the low-cost dual-frequency for the estimation of atmospheric parameters. Krietemeyer et al. in [
7], investigated the potential of the u-blox ZED-F9P in combination with a range of different quality antennas for the estimation of Zenith Tropospheric Delays (ZTDs). They showed that the receiver itself is very capable of achieving high-quality ZTD estimations.
Okoh et al. in [
8] and Dan et al. in [
9], found that the u-blox is a good candidate for TEC (Total Electron Content) studies, just like the high-cost receivers.
Some papers investigated ZED-F9P for landslide monitoring [
10,
11,
12] and displacement detection. Hamza et al. [
13] showed that on a basis of 30-min sessions the instruments can detect displacements from 10 mm upwards with a high level of reliability. In [
14], Tunini et al. matched, in parallel, the ZED-F9P receiver with two high-price geodetic instruments, all connected to the same geodetic antenna. They processed the data, together with the observations coming from a network of GNSS permanent stations operating in that region. The results show that mm-order precision can be achieved by cost-effective GNSS receivers, and the results in terms of time series are largely comparable to those obtained using high-price geodetic receivers.
Some other tests were carried out to evaluate the performances of ZED-F9P, connected to a u-blox ANN-MB-00-00, as a land-survey receiver. Wielgocka et al. [
15] investigated the performance of a u-blox ZED-F9P receiver, connected to a u-blox ANN-MB-00-00 antenna, during multiple field experiments. In static tests, the centimeter-level accuracy was achieved both for the horizontal and vertical components. In kinematic tests, the RMSE for the vertical component was 56.7 mm. For 46% of epochs, the positioning error for the height determination exceeded 5 cm, including 11% of epochs with errors exceeding 10 cm. In [
16], with the same configuration, thirty-six monuments in four piedmont counties of South Carolina were surveyed in RTK FIX mode. The 95% confidence level accuracies for the horizontal and height dimensions were 3.7-cm and 4.2-cm (95%), respectively. Hamza et al. [
17] compared the positioning quality from different types of low-cost antennas and analyzed the positioning differences between low-cost and geodetic instruments, demonstrating the excellent performance of the receiver, sufficiently appropriate for various geodetic applications. Krietemeyer et al. [
18] presented an antenna field calibration method to improve the performance of the low-cost ANN-MB-00-00. After calibration, the ambiguity-fixed phase residuals maintain a Median Absolute Deviation (MAD) of 3.5 mm on L1 and 4.4 mm on L2, bringing its behaviour closer to that of geodetic antennas. Moreover, Janos and Kuras [
19] evaluated the position accuracy using the u-blox ZED-F9P receiver, with the satellite signal supplied by both the dedicated low-cost u-blox ANN-MB-00-00 patch antenna and the Leica AS10 high-precision geodetic one. As a result, it was concluded that the ZED-F9P receiver equipped with a patch antenna is only suitable for precision measurements in conditions of wide-open sky areas. However, the configuration of this receiver with a geodetic-grade antenna significantly improves the quality of the results. In [
20], Broekman and Gräbe demonstrated that a low-cost, mobile, real-time kinematic (RTK) geolocation service, fabricated with components readily available from commercial suppliers, provides centimeter-accuracy performance up to a distance of 15 km from the base station.
Starting from these results, the present study aims to assess the possibility that these receivers can work as spare units or even upgrade a real infrastructure of a network of permanent GPS stations to make it a multi-constellation network. In this case, the u-blox base or master [
21,
22] station would take advantage of the geodetic-grade antennas already present in the reference stations of the network. It is clear that it is necessary not only for the availability of the hardware but also of a very complete and well-organized software package that allows us to configure and evaluate all the possible performances of the receiver.
The performances can be evaluated from many different characteristics, for example, the possibility to operate as a base, the ability to power up the antenna and the ability to generate and process the RTK mode with the RTCM correction data. On the rover side, the Time To First Fix (TTFF) with a given number of satellites in view, the ability to set every possible configuration, for example the parameters of the antennas and so on.
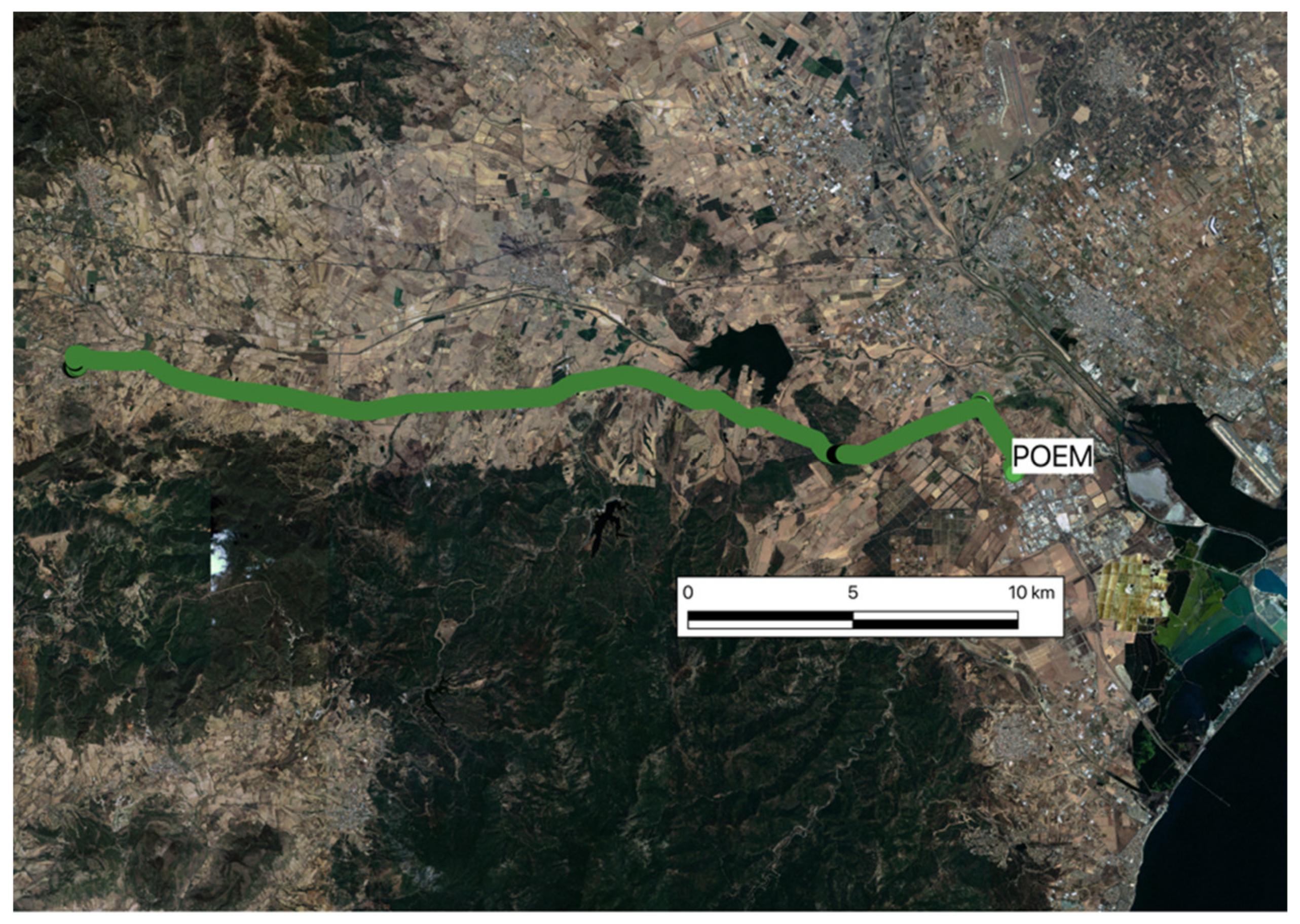
In order to test the u-blox ZED-F9P receiver, we recreated the base-rover configuration similar to the one present in the network to be updated. The experimentation took place in the south of Sardinia, in an area covered by a network of NRTK (SARNET) permanent stations used for more than 15 years, in geodetic and topographic applications, both scientifically [
23] concerning atmospheric parameter estimation and professionally for real-time precise positioning. The network is a GPS only infrastructure and needs to be expanded and upgraded. Two new reference stations were established, and two car tests were carried out in two different routes along suburban roads and in a city environment.
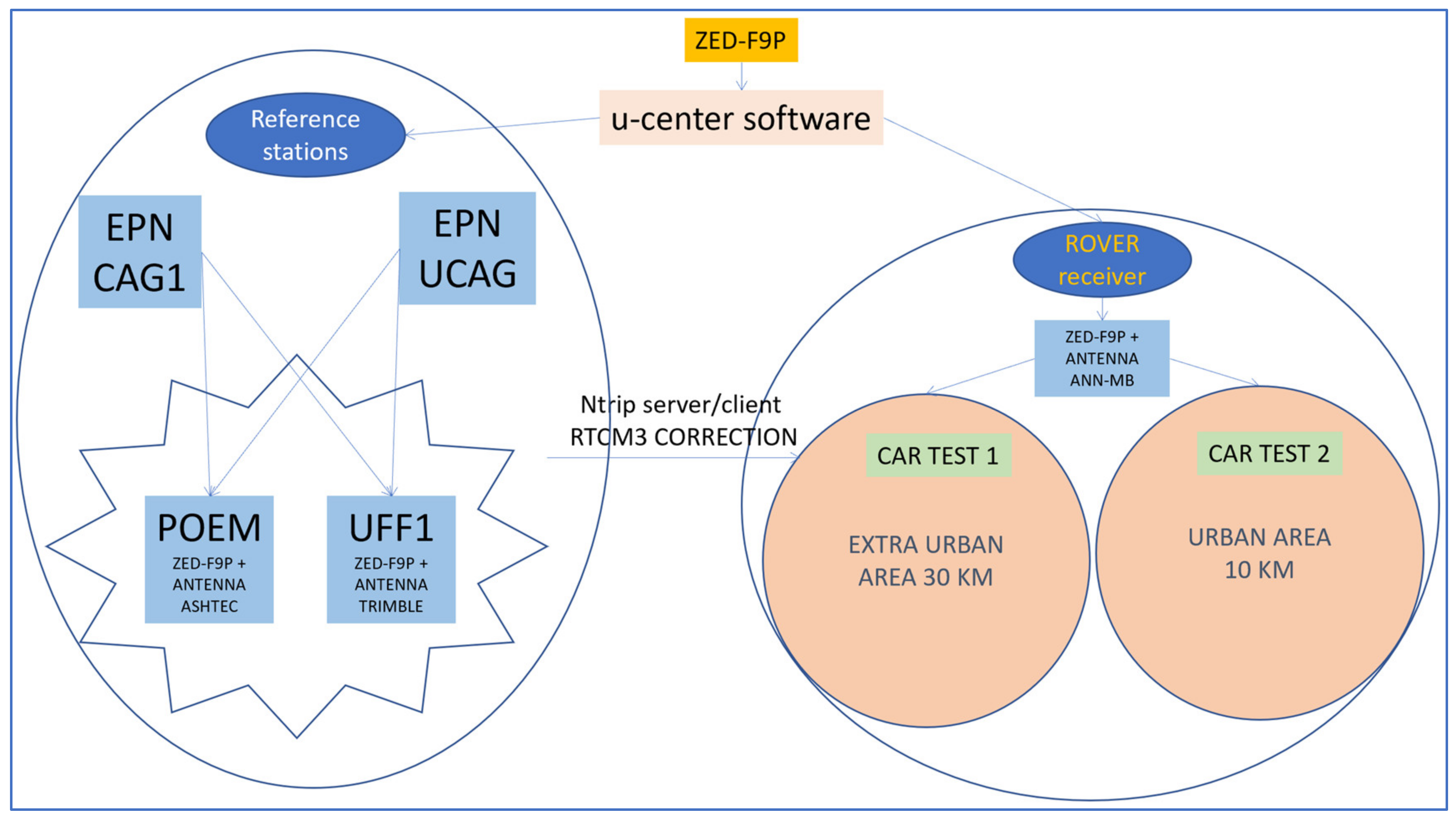
We created a small GNSS network and carried out tests according to the flow chart in
Figure 1. First, we studied the ZED-F9P receiver to set the parameters and make it work as a base or as a rover in real-time. We set up two permanent stations, with geodetic-grade-antennas, and performed static surveys to determine their coordinates. During the static surveys we alternated the u-blox receiver with a professional one to compare the results. To evaluate the characteristics of the receiver as a rover, we performed two kinematic tests and compared the results obtained in real-time with those post-processed with the RTKLib software, widely tested and used by the scientific community. In the following,
Section 2 describes the ZED-F9P receiver used to create the network infrastructure and
Section 3 describes methods used to obtain the reference stations coordinates, the car test tracks and the quality assessment. In
Section 4, the results and discussion of the experimentation are described in detail, while
Section 5 reports the conclusions.
2. Materials
2.1. ZED-F9P Receiver
In our test, we used the SparkFun GPS-RTK2 Board, which houses the u-blox ZED-F9P [
24] low-cost chip that can receive satellite signals in the lower and upper L-band (L1C/A, L1OF, E1, B1L, L2C, L2OF, E5b, B2l) from all available satellite constellations (GPS, GLONASS, Galileo, BeiDou, QZSS). The manufacturer states a positioning accuracy of 1 cm + 1 ppm in RTK mode, with a baseline limited to 20 km [
25].
It offers RTK and RTN (Real-Time Network) operation with a high frequency measurement rate (up to 20 Hz) and accuracy (1 cm + 1 ppm). In conditions of good satellite visibility, the receiver quickly resolves its position (cold start < 24 s, reacquisition < 2 s).
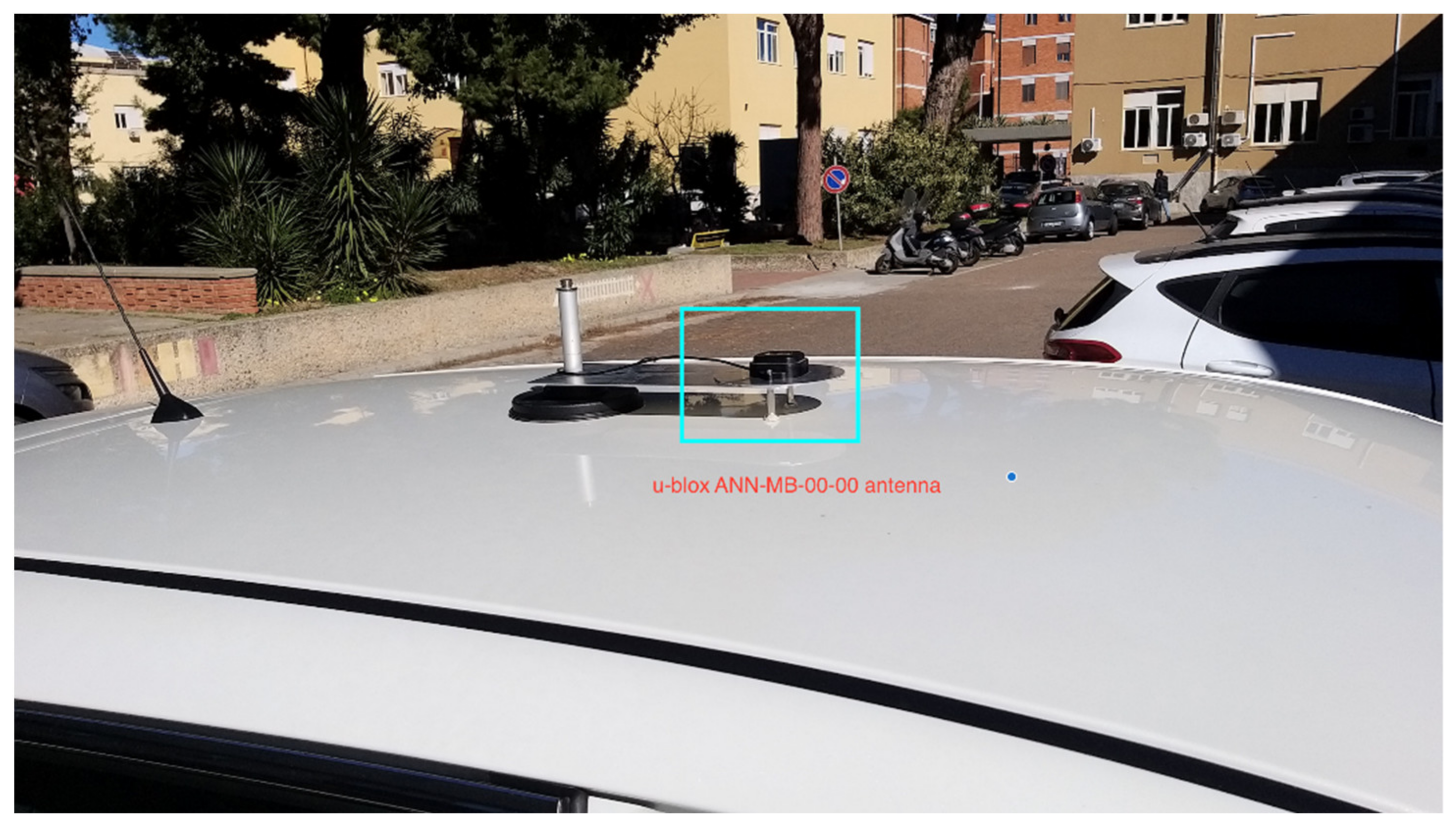
Additionally, anti-jamming and anti-spoofing algorithms are implemented into the receiver, allowing the assumption that it can discard unwanted signals. It has a wide operating temperature range, low power consumption, light weight and a large number of physical inputs/outputs and communication capabilities. In the rover configuration, the receiver was connected to a standard u-blox ANN-MB-00-00 active patch antenna, having a circular ground plane (as recommended by the manufacturer). It was a Right-Hand Circular Polarized (RHCP) dual-band antenna (L1 and L2/E5b/B2I).
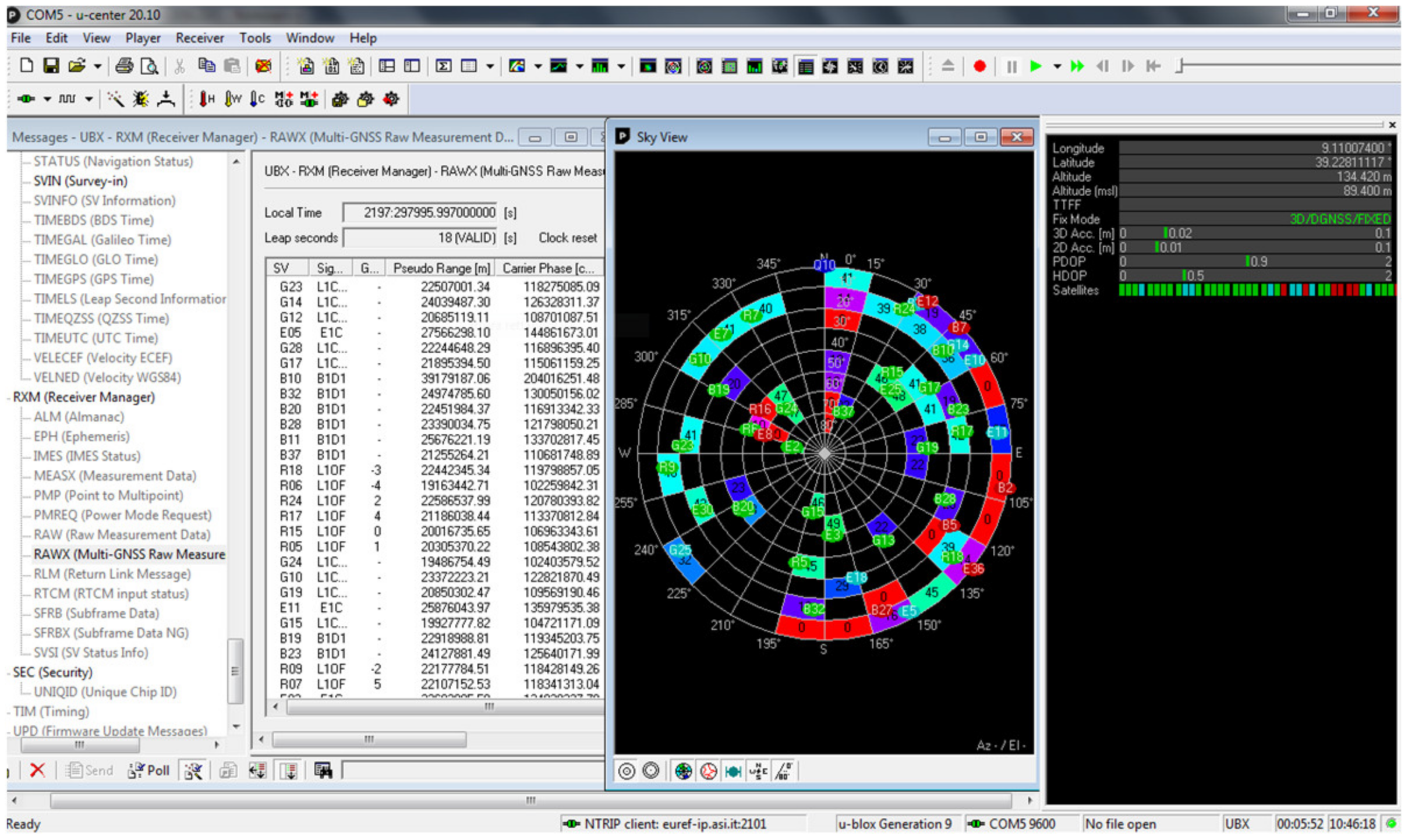
The u-blox has developed the u-center GNSS evaluation software for Windows [
26], which allow to set and acquire many configurations, parameters and raw data to evaluate the receiver performances in real-time or to be used in post processing analysis. U-center has a clear and complete graphical user interface (
Figure 2) where you can easily set and visualize many different parameters. The ZED-F9P can be set up with a great number of variables, such as those for the management of NMEA messages, those that make the receiver operate as a base or as a rover and those for the management of the RTCM3 protocol.
The ZED-F9P receiver can be set up to operate as a base/rover through the TMODE parameter. When it operates as a rover, the TMODE = 0 (disabled), to operate as a base, you set TMODE = 1 (survey-in), which means that the base must first estimate the antenna reference coordinates. You set TMODE = 2 (fixed) if the coordinates of the reference station are already known. When the receiver operates as a base, it only estimates the clock offset from the GPS time. We set the TMODE variable to the value of 2 because we already estimated the coordinates of the permanent stations.
Regarding the RTCM3, when operating as a rover, the receiver interprets the RTCM3 messages from 1001 to 4072, including 1007 antenna descriptor message. Operating as a base, however, the messages that the receiver can generate are far fewer and do not include antenna descriptors (
Table 1). The antenna descriptors include two types of data: the PCO (phase center offset with respect to the ARP) on both L1 and L2, and the PCV (i.e., the phase center variations with respect to the signal arrival direction, mapped in elevation or azimuth and elevation). The ZED-F9P does not correct for PCO, but rover coordinates can be still corrected by referring the base antenna coordinates to the phase center and not to the ARP. The PCV correction instead, enters directly into the Double Differences equations [
27] when using different antennas between base and rover and, therefore, cannot be corrected. The PCV values are usually very small:
Table 2 shows the PCV values for the u-blox ANN-MB-00-00 antenna, always less than 5 mm for L1 and always less than 10 mm for L2 (
Table 2).
In real-time activity, a server and a client of the Ntrip protocol for the transmission of the RTCM messages via the Internet are implemented in the u-center software. For post-processing activity, the software allows the creation of a log file, which contains all the information related to the configuration of the receiver and the raw data measurements. Afterwards, it is possible to obtain a RINEX file of the observations to post-process the phase and code observations with the commonly used GNSS processing software. However, all settings transmitted to the receiver can be sent outside the u-center software with simple scripts.
2.2. Reference Stations Setup
The only two permanent stations of the EPN network in Sardinia are located within the same area, housed on the terrace above our research laboratory, in Cagliari. The first one, UCAG00ITA (UCAG), is operated by ASI (Italian Space Agency) and has been included in the EPN network since August 2015. The second one, CAG100ITA (CAG1), is operated by our research group at the DICAAR of the University of Cagliari and has been included in the EPN network since January 2016. The two stations, which are separated by a few meters, are classified as a class A station, which means that can be used as a fiducial station for the EUREF densification.
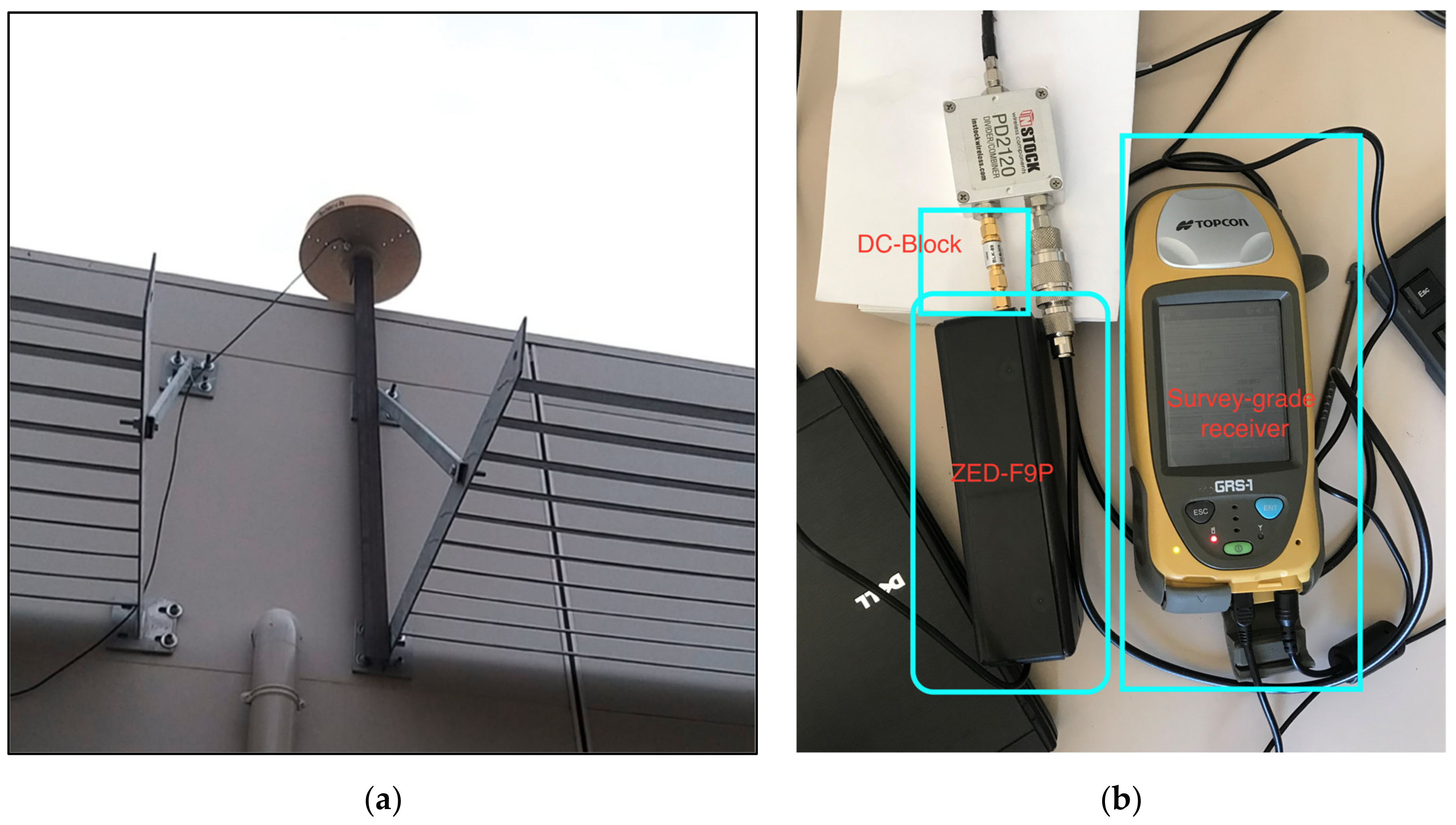
We set up two new reference stations, estimating their position with a static survey from the permanent stations UCAG and CAG1. The first one, named POEM, was based in a lowland area approximately 12 km away from the EPN stations, at the “Sardegna Ricerche” research center site. POEM was equipped with a geodetic choke ring antenna ASH701945C_M from Ashtech, see
Figure 3a. This antenna requires a 5 V power supply, which the ZED-F9P cannot provide. Therefore, we connected a Topcon GRS-1 survey-grade receiver in parallel, which provided the power supply. An antenna splitter, PD2120, was inserted together with a DC-Block to prevent the ZED-F9P from being powered by the voltage supplied from the Topcon receiver.
Figure 3b shows the connections made between the antenna and the receivers. The second receiver allowed us to carry out independent data processing to determine the POEM coordinates.
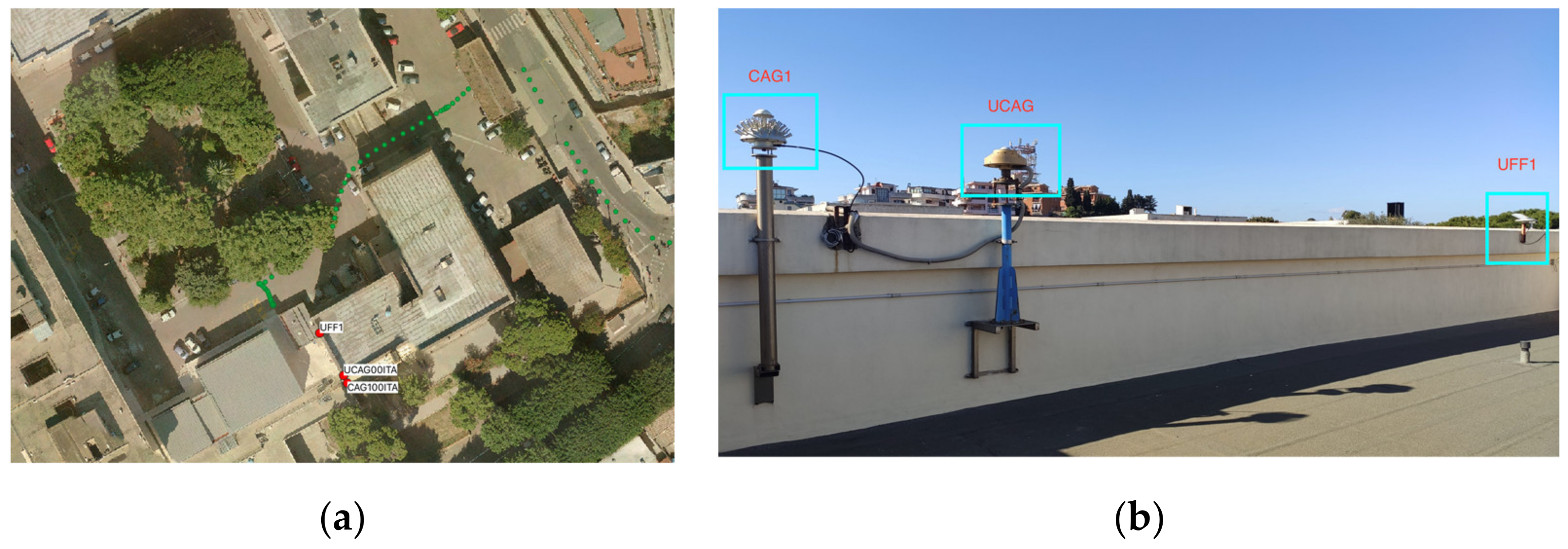
The second reference station, named UFF1, was set up roughly twelve meters away from the CAG1 EPN station. UFF1 was equipped with a Trimble’s Zephir Geodetic 2 antenna [
28], the same as those present in the network of GPS permanent stations. The antenna supports all bands (L1/L2/L5/G1/G2/G3/E1/E5ab/E6/B1/B2/B3) to which the receiver under investigation is connected. In this case, the ZED-F9P receiver was able to power up the antenna, which required a voltage of at least 3.5 V. The ZED-F9P receiver, in turn, was powered by the PC where the u-center resides.
Figure 4 shows the position of the UFF1 reference station on the terrace of the building (a) and in relation to the EPN reference stations (b).
5. Conclusions
We set ourselves the goal of evaluating the behavior of the u-blox ZED-F9P receiver for use in geodetic and topographic applications and assessing its behavior both as a base and as a rover. In base mode, the RTCM messages enabled on ZED-F9P do not allow the sending of the full description of the antenna to the rover, so it is essential for the rover to know the model of the antenna connected to the base in advance. As an alternative, it is necessary to send in the RTCM 1005 message the coordinates referred to the phase center of the antenna and not to the ARP. It is not unlikely that a firmware upgrade will fix the problem. Regardless of the RTCM problem, the results on the base side will allow us to proceed with the experimentation and, thus, to place the ZED-F9P receiver within the network of permanent geodetic stations.
On the rover side, the situation is more complex. The ZED-F9P receiver, as already highlighted in [
19], does not currently handle the PCV antenna calibration information. Hence, it will be difficult to go below the claimed accuracy in real-time applications without the constraint of using the same model of antenna for both the base and the rover. In our opinion, this limits the use of this receiver and antenna in deformation study applications or in tropospheric parameter estimation as underlined in [
18]. RTKLib, widely used by the scientific community, could be used to solve this limit. RTKLib accepts streams of data from both the base and the rover and calculates the rover’s position in real-time, using its own RTK engine instead of the receiver engine. RTKLib is capable of correcting PCV, provided that the antennas are present in the antenna database.
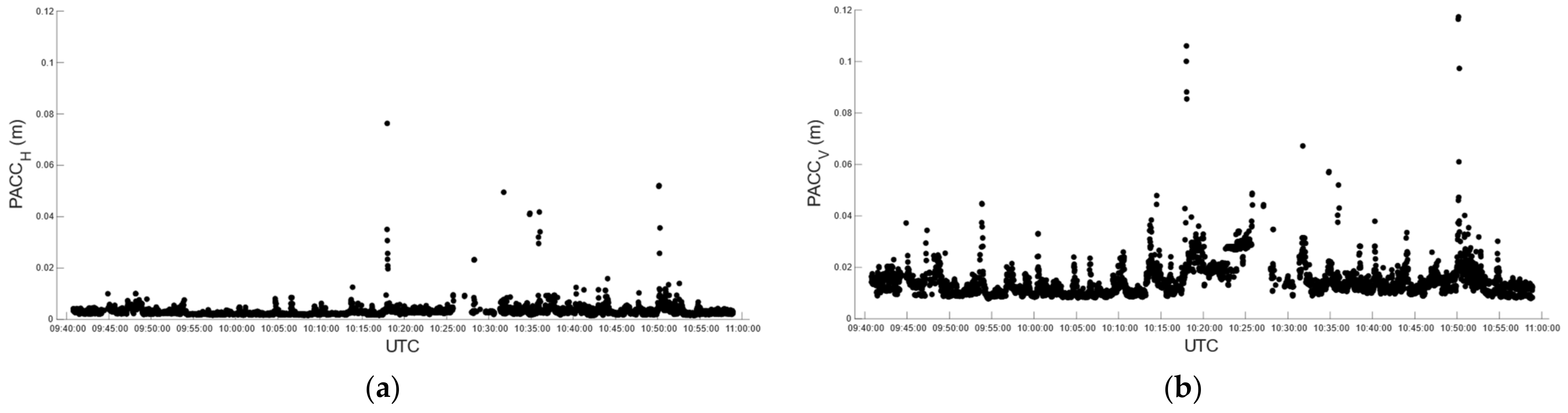
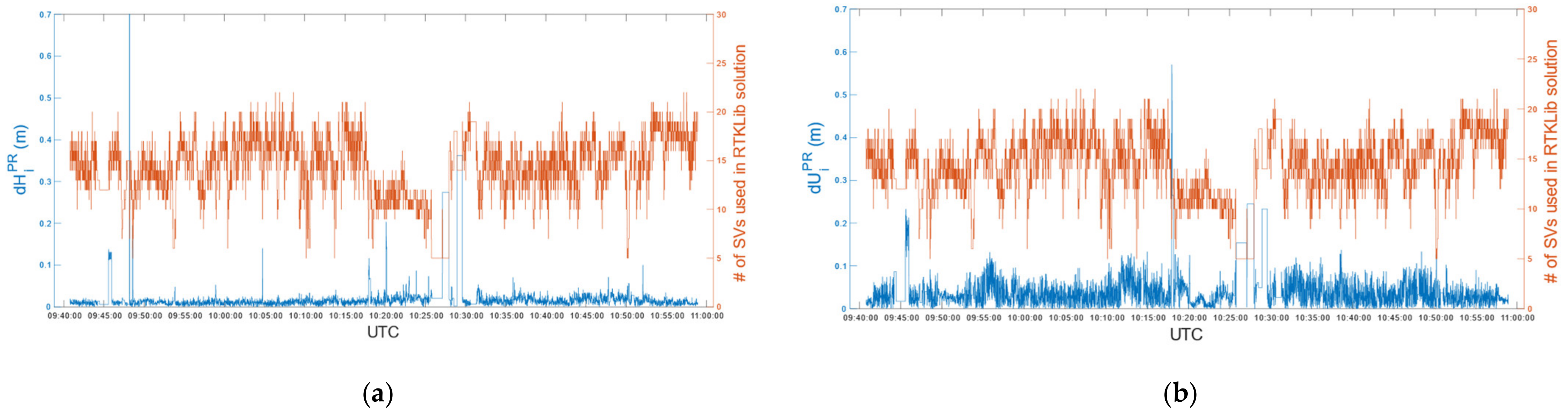
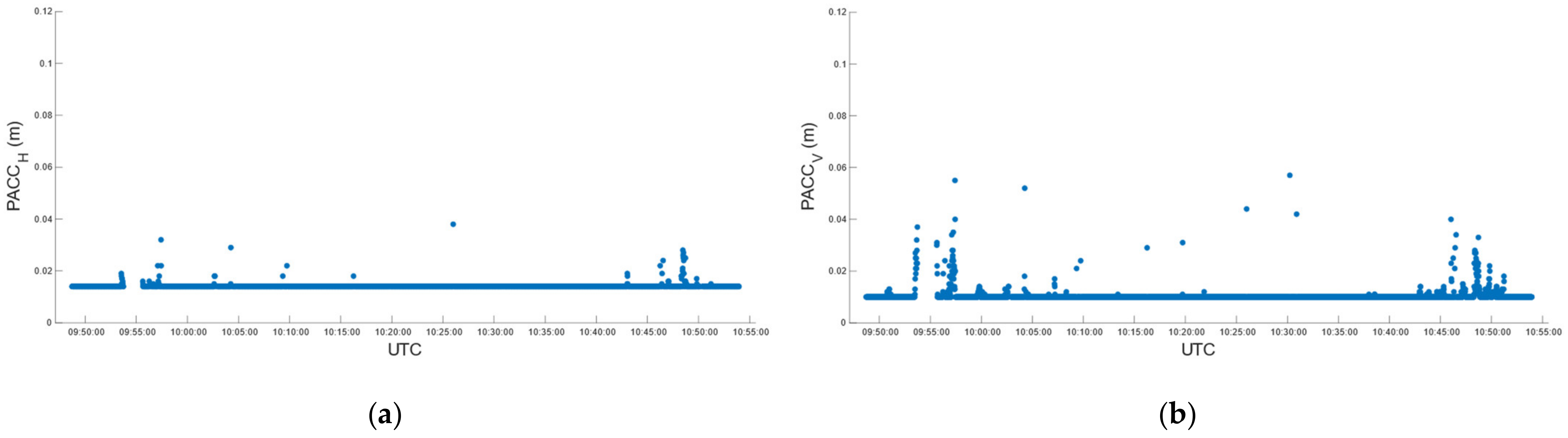
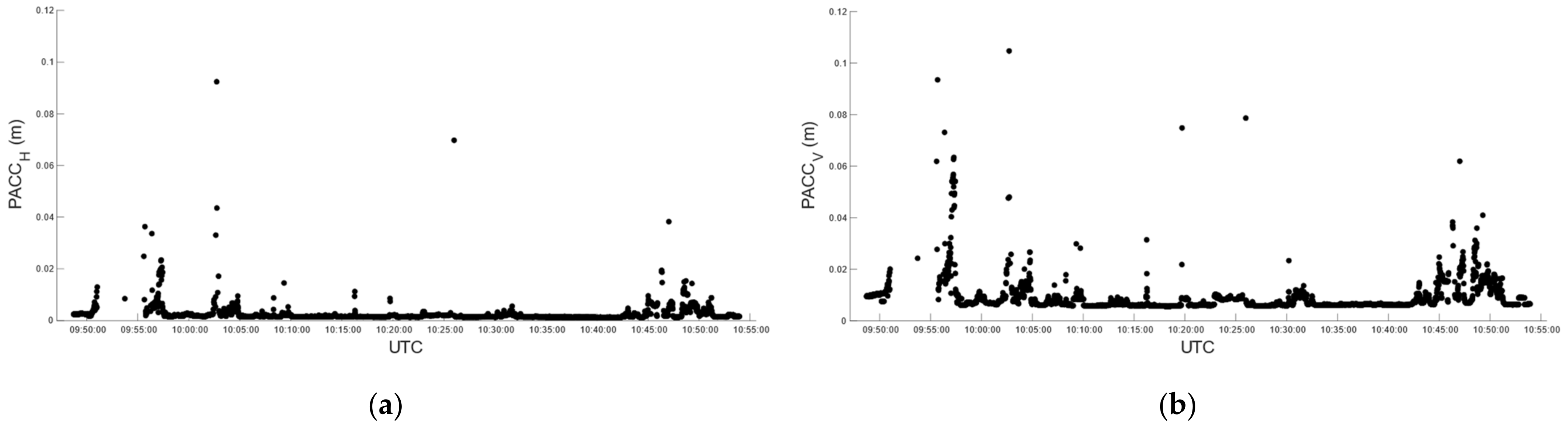
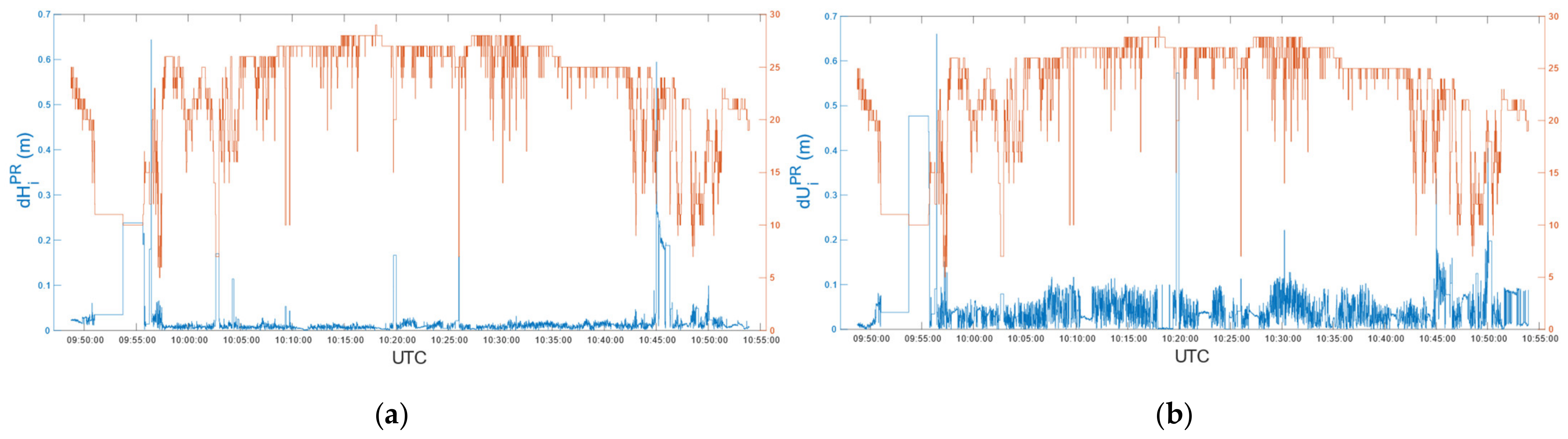
The comparison between the real-time and the post-processed solutions allowed us to evaluate the efficiency of the RTK engine of the ZED-F9P, which was higher than that of RTKLib. The RTKLib solutions were given with a higher precision, but real-time solutions were in good agreement with the post-processed ones, showing that less than 5% of differences were above 30 mm in the horizontal component and 100 mm in the vertical component. In conclusion, comparing the RTKLib and the u-blox RTK engines, the u-blox RTK proved to be reliable and more efficient and, therefore, difficult to leave.
The study carried out so far is the starting point for performing other tests to answer the many questions still pending. For example, the comparison with professional rover receivers, the use of a survey-grade antenna on the rover side and the evaluation of the receiver range both in terms of accuracy and reliability at long distances. In the future, the tests indicated above, as well as a more complete analysis of the daily solutions of the permanent stations, will allow us to more fully exploit the potential of the receivers of this low-cost market segment.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}