
Propulsion Calculated by Force and Displacement of Center of Mass in Treadmill Cross-Country Skiing

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Protocol
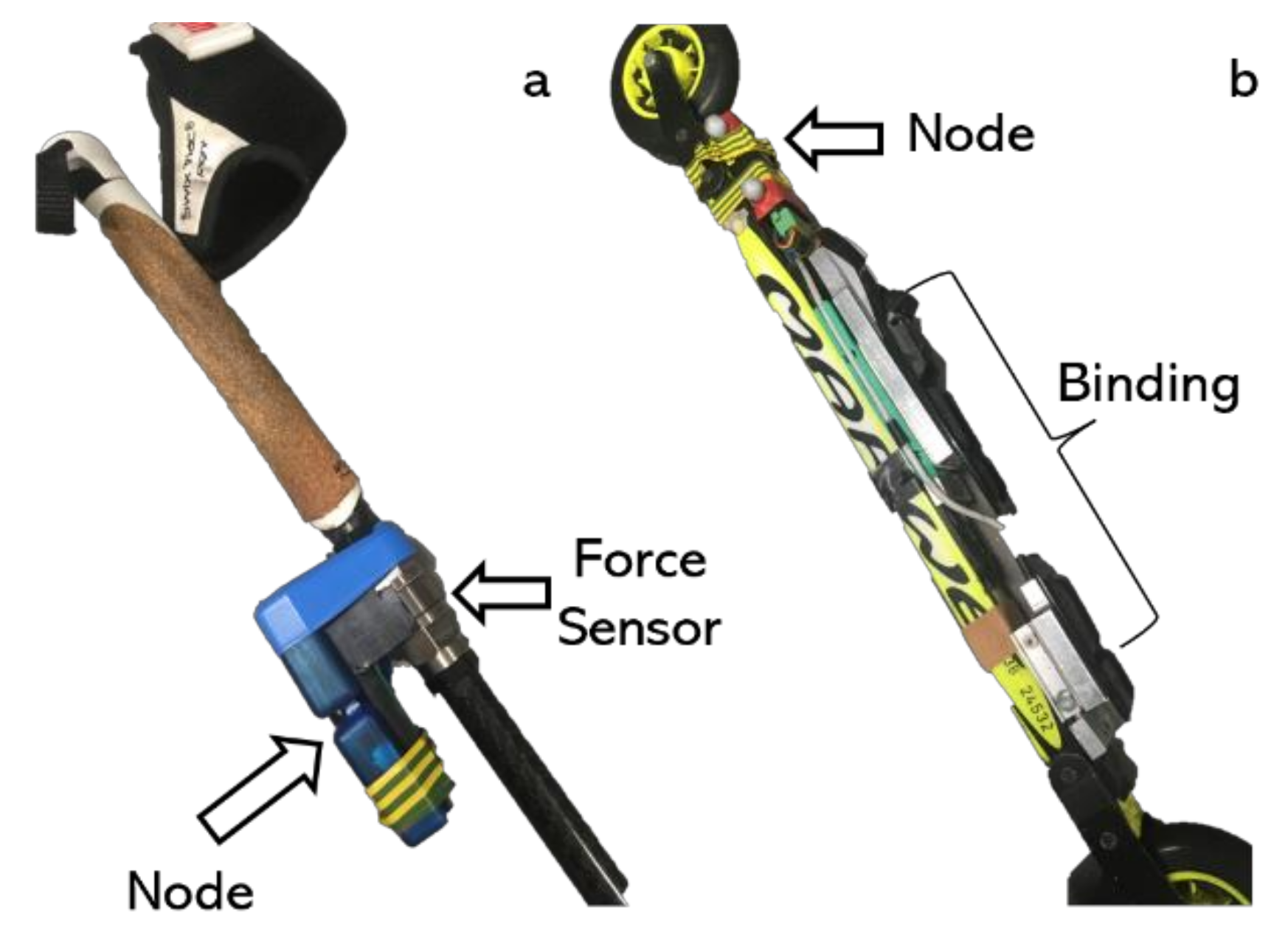
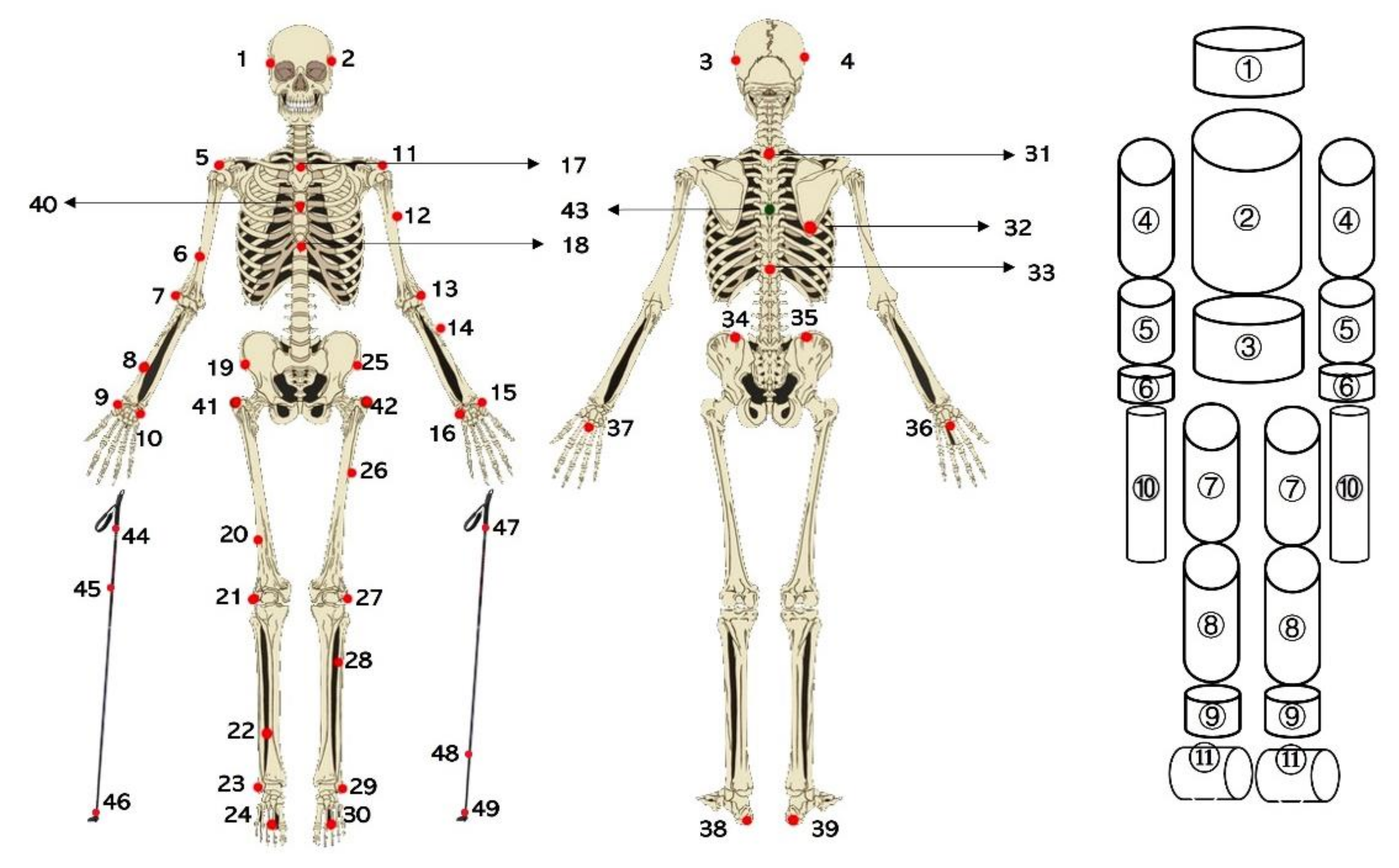
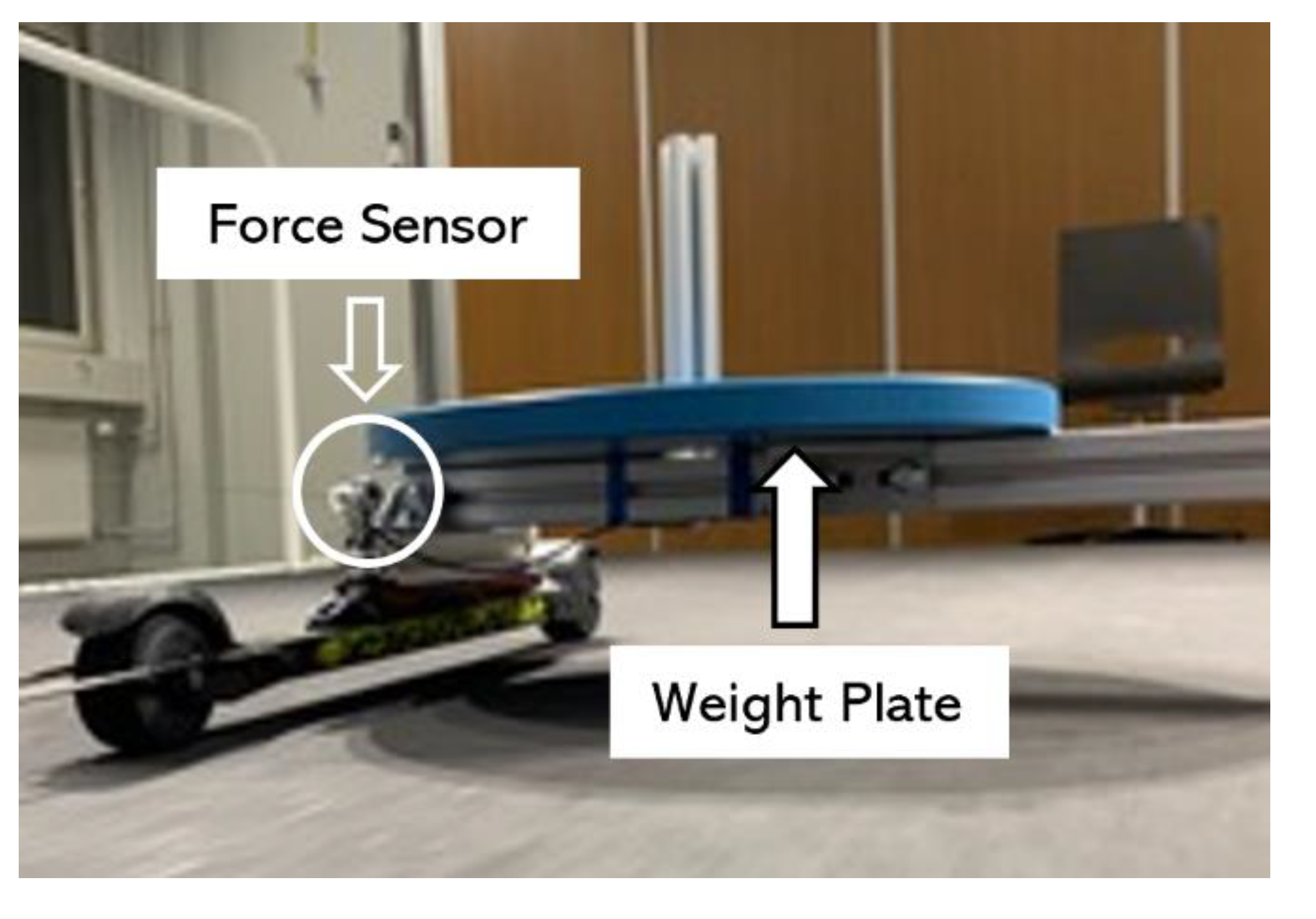
2.3. Data Collection
2.4. Data Reduction
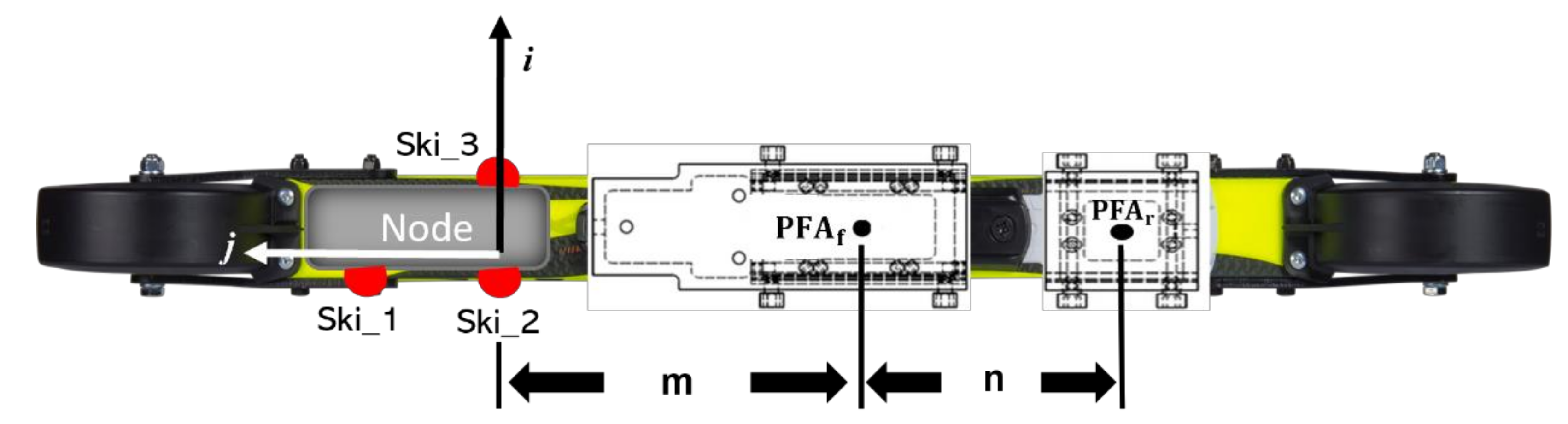
2.4.1. Transforming the Forces Measured from the Force Sensor into the GCS and the PFA
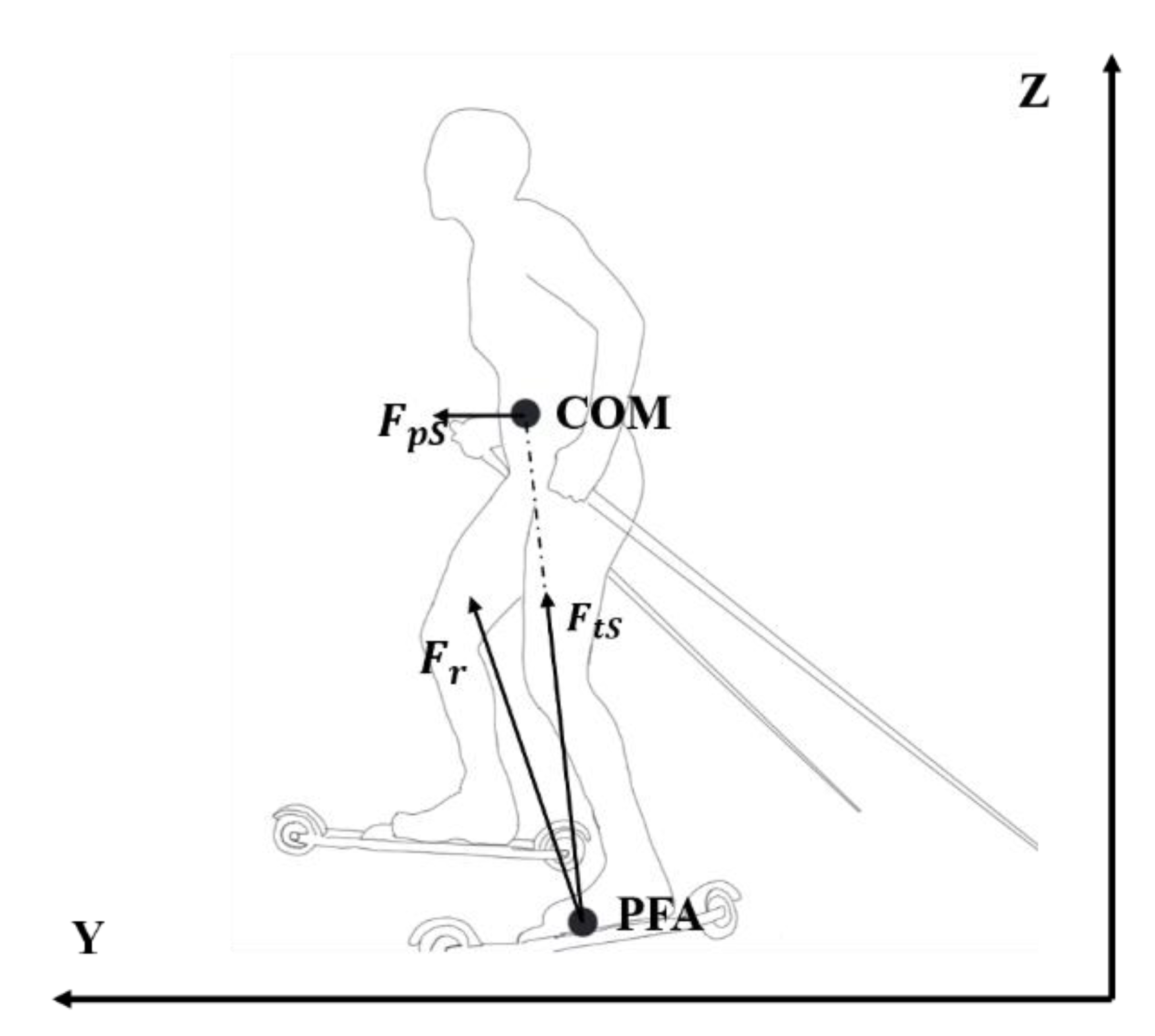
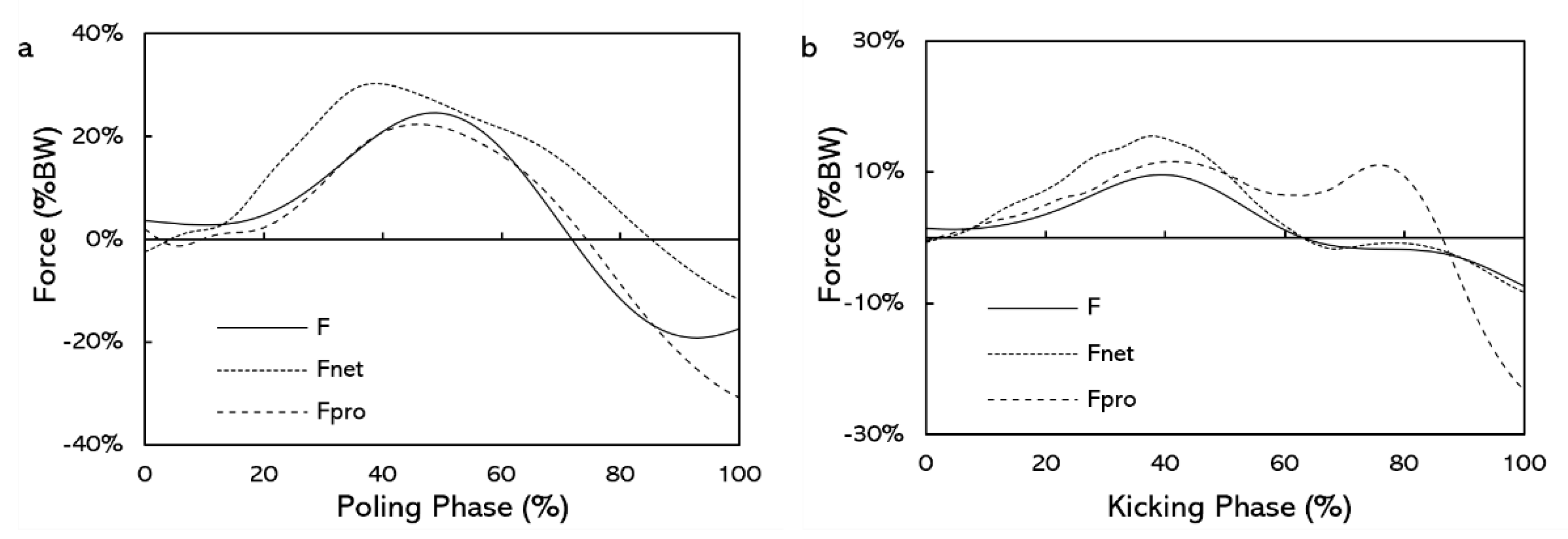
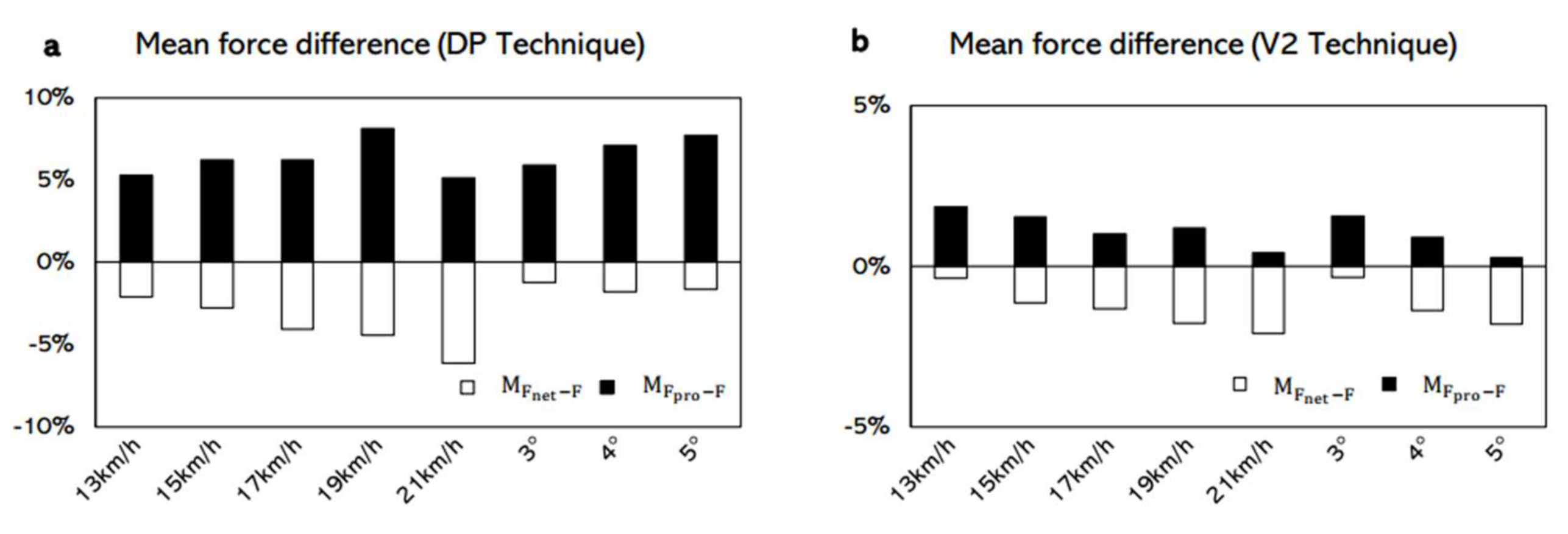
2.4.2. The Reference Force, the Total Resultant Force, and the Translational Force
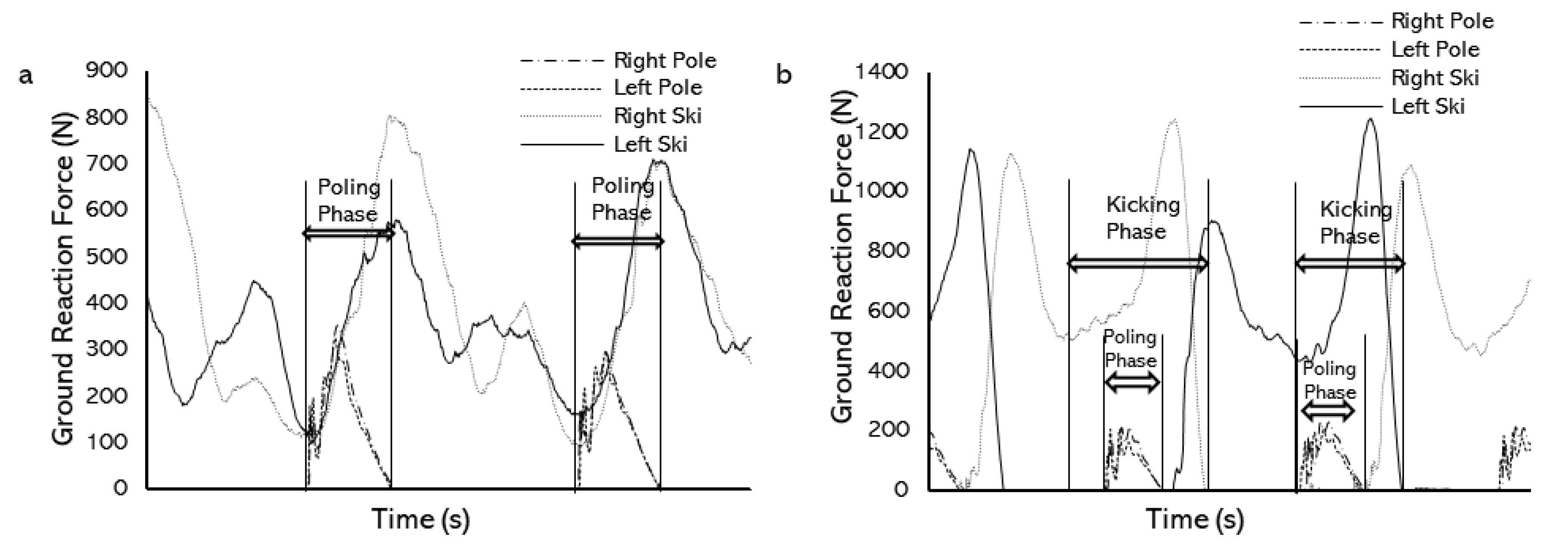
2.4.3. Cycle Definition and Analyzed Parameters
2.5. Statistical Analyses
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Measurement and Calculation of Resistance Friction Coefficient of Roller Ski

Appendix B. Mechanical Principle of Translational Force


References
- Smith, G.A. Biomechanics of cross country skiing. In Cross Country Skiing. Handbook of Sports Medicine; Rusko, H., Ed.; Wiley: New York, NY, USA, 2003; pp. 32–61. [Google Scholar]
- Mapelli, A.; Zago, M.; Fusini, L.; Galante, D.; Colombo, A.; Sforza, C. Validation of a protocol for the estimation of three-dimensional body center of mass kinematics in sport. Gait Posture 2014, 39, 460–465. [Google Scholar] [CrossRef] [PubMed]
- Stoggl, T.; Holmberg, H.C. Three-dimensional Force and Kinematic Interactions in V1 Skating at High Speeds. Med. Sci. Sports Exerc. 2015, 47, 1232–1242. [Google Scholar] [CrossRef] [PubMed]
- Smith, G.; Kvamme, B.; Jakobsen, V. Ski skating technique choice: Mechanical and physiological factors affecting performance. In Proceedings of the ISBS-Conference Proceedings Archive, Ouro Preto, Brazil, 23–27 August 2007. [Google Scholar]
- Hoset, M.; Rognstad, A.; Rølvåg, T.; Ettema, G.; Sandbakk, Ø. Construction of an instrumented roller ski and validation of three-dimensional forces in the skating technique. Sports Eng. 2014, 17, 23–32. [Google Scholar] [CrossRef]
- Göpfert, C.; Pohjola, M.V.; Linnamo, V.; Ohtonen, O.; Rapp, W.; Lindinger, S.J. Forward acceleration of the centre of mass during ski skating calculated from force and motion capture data. Sports Eng. 2017, 20, 141–153. [Google Scholar] [CrossRef] [Green Version]
- Ohtonen, O.; Lindinger, S.J.; Gopfert, C.; Rapp, W.; Linnamo, V. Changes in biomechanics of skiing at maximal velocity caused by simulated 20-km skiing race using V2 skating technique. Scand. J. Med. Sci. Sports 2018, 28, 479–486. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smith, G.A. Biomechanical analysis of cross-country skiing techniques. Med. Sci. Sports Exerc. 1992, 24, 1015–1022. [Google Scholar] [CrossRef] [PubMed]
- Holmberg, H.C.; Lindinger, S.; Stöggl, T.; Björklund, G.; Müller, E. Contribution of the legs to double-poling performance in elite cross-country skiers. Med. Sci. Sports Exerc. 2006, 38, 1853–1860. [Google Scholar] [CrossRef] [PubMed]
- Andersson, E.; Stoggl, T.; Pellegrini, B.; Sandbakk, O.; Ettema, G.; Holmberg, H.C. Biomechanical analysis of the herringbone technique as employed by elite cross-country skiers. Scand. J. Med. Sci. Sports 2014, 24, 542–552. [Google Scholar] [CrossRef] [PubMed]
- Stoggl, T.; Muller, E.; Lindinger, S. Biomechanical comparison of the double-push technique and the conventional skate skiing technique in cross-country sprint skiing. J. Sports Sci. 2008, 26, 1225–1233. [Google Scholar] [CrossRef] [PubMed]
- Stoggl, T.L.; Holmberg, H.C. Double-Poling Biomechanics of Elite Cross-country Skiers: Flat versus Uphill Terrain. Med. Sci. Sports Exerc. 2016, 48, 1580–1589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sandbakk, O.; Holmberg, H.C. A reappraisal of success factors for Olympic cross-country skiing. Int. J. Sports Physiol. Perform. 2014, 9, 117–121. [Google Scholar] [CrossRef] [PubMed]
- Stöggl, T.; Stöggl, J.; Müller, E. Competition analysis of the last decade (1996–2008) in crosscountry skiing. In Science and Skiing IV; Erich Müller, S.L., Thomas, S., Eds.; Meyer & Meyer Sport: Berkshire, UK, 2008; pp. 657–677. [Google Scholar]
- Ohtonen, O.; Lindinger, S.; Lemmettylä, T.; Seppälä, S.; Linnamo, V. Validation of portable 2D force binding systems for cross-country skiing. Sports Eng. 2013, 16, 281–296. [Google Scholar] [CrossRef]
- Ohtonen, O.; Ruotsalainen, K.; Mikkonen, P.; Heikkinen, T.; Hakkarainen, A.; Leppävuori, A.; Linnamo, V. Online feedback system for athletes and coaches. In Proceedings of the 3rd International Congress on Science and Nordic Skiing, Vuokatti, Finland, 5–8 June 2015; p. 35. [Google Scholar]
- Yu, B.; Gabriel, D.; Noble, L.; An, K.-N. Estimate of the optimum cutoff frequency for the Butterworth low-pass digital filter. J. Appl. Biomech. 1999, 15, 318–329. [Google Scholar] [CrossRef]
- Selbie, W.S.; Hamill, J.; Kepple, M.T. Three-Dimentional Kinetics. In Research Methods in Biomechanics, 2nd ed.; Robertson, G.E., Caldwell, G.E., Hamill, J., Kamen, G., Whittlesey, S., Eds.; Human Kinetics: Champaign, IL, USA, 2013; pp. 159–160. [Google Scholar]
- Danielsen, J.; Sandbakk, Ø.; McGhie, D.; Ettema, G. Mechanical energetics and dynamics of uphill double-poling on roller-skis at different incline-speed combinations. PLoS ONE 2019, 14, e0212500. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Winter, D.A. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Kadaba, M.; Ramakrishnan, H.; Wootten, M.; Gainey, J.; Gorton, G.; Cochran, G. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. J. Orthop. Res. 1989, 7, 849–860. [Google Scholar] [CrossRef] [PubMed]
- Yu, B.; Kienbacher, T.; Growney, E.S.; Johnson, M.E.; An, K.N. Reproducibility of the kinematics and kinetics of the lower extremity during normal stair-climbing. J. Orthop. Res. 1997, 15, 348–352. [Google Scholar] [CrossRef] [PubMed]
- Malek, M.H.; Coburn, J.W.; Marelich, W.D. Advanced Statistics for Kinesiology and Exercise Science: A Practical Guide to ANOVA and Regression Analyses; Routledge: Oxfordshire, UK, 2018. [Google Scholar]
- Robertson, G.E. Engergy, Work, and Power. In Research Methods in Biomechanics, 2nd ed.; Robertson, G.E., Caldwell, G.E., Hamill, J., Kamen, G., Whittlesey, S., Eds.; Human Kinetics: Champaign, IL, USA, 2013; p. 132. [Google Scholar]
- Schwameder, H. Biomechanics research in ski jumping, 1991–2006. Sports Biomech. 2008, 7, 114–136. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DP Technique | V2 Technique | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| CMCnet | CMCpro | p-Value | Pη2 | CMCnet | CMCpro | p-Value | Pη2 | ||
| Speeds | 13 km/h | 0.935 ± 0.022 | 0.910 ± 0.038 | 0.106 b | 0.155 | 0.901 ± 0.048 | 0.853 ± 0.043 | ||
| 15 km/h | 0.933 ± 0.023 | 0.916 ± 0.034 | 0.230 b | 0.089 | 0.908 ± 0.047 | 0.862 ± 0.050 | |||
| 17 km/h | 0.920 ± 0.030 | 0.919 ± 0.030 | 0.951 b | 0.001 | 0.905 ± 0.040 | 0.861 ± 0.035 | 0.011 a | 0.309 | |
| 19 km/h | 0.901 ± 0.045 | 0.908 ± 0.046 | 0.778 b | 0.005 | 0.885 ± 0.045 | 0.837 ± 0.047 | |||
| 21 km/h | 0.883 ± 0.058 1,2,3 | 0.907 ± 0.042 | 0.330 b | 0.059 | 0.879 ± 0.044 | 0.832 ± 0.041 | |||
| p-value | 0.043 d | 0.371 d | 0.008 c | ||||||
| Pη2 | 0.509 | 0.264 | 0.216 | ||||||
| Inclines | 3° | 0.933 ± 0.024 | 0.914 ± 0.046 | 0.911 ± 0.032 | 0.856 ± 0.073 | 0.042 b | 0.210 | ||
| 4° | 0.946 ± 0.016 | 0.932 ± 0.033 | 0.218 a | 0.093 | 0.922 ± 0.041 | 0.896 ± 0.044 * | 0.179 b | 0.098 | |
| 5° | 0.955 ± 0.015 | 0.936 ± 0.037 | 0.912 ± 0.047 | 0.900 ± 0.055 * | 0.617 b | 0.014 | |||
| p-value | 0.001 e | 0.479 f | 0.007 f | ||||||
| Pη2 | 0.464 | 0.083 | 0.446 | ||||||
| DP Technique | V2 Technique | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| p-Value | Pη2 | p-Value | Pη2 | ||||||
| Speed | 13 km/h | 6.1 ± 1.1 | 8.1 ± 2.9 | 0.058 b | 0.207 | 2.9 ± 0.4 | 4.4 ± 0.8 | ||
| 15 km/h | 6.9 ± 1.1 | 9.1 ± 2.6 4 | 0.028 b | 0.268 | 3.1 ± 0.5 | 4.7 ± 0.4 | |||
| 17 km/h | 8.5 ± 1.5 1,2,5 | 10.2 ± 3.3 1,4 | 0.166 b | 0.116 | 3.6 ± 0.6 | 4.8 ± 0.5 | 0.001 a | 0.633 | |
| 19 km/h | 9.0 ± 1.3 1,2 | 11.6 ± 3.6 1,2,3 | 0.057 b | 0.209 | 4.0 ± 0.9 | 5.4 ± 0.8 | |||
| 21 km/h | 10.8 ± 2.2 1,2,3 | 10.9 ± 2.4 1 | 0.992 b | 0.001 | 4.4 ± 0.9 | 5.3 ± 0.5 | |||
| p-value | 0.001 d | 0.001 d | 0.001 c | ||||||
| Pη2 | 0.856 | 0.857 | 0.588 | ||||||
| Inclines | 3° | 6.2 ± 0.9 | 8.7 ± 3.0 | 2.9 ± 0.5 | 4.5 ± 0.8 | 0.001 b | 0.617 | ||
| 4° | 7.1 ± 1.1 | 9.6 ± 2.7 | 0.015 a | 0.315 | 3.4 ± 1.1 | 4.5 ± 0.6 | 0.013 b | 0.295 | |
| 5° | 7.6 ± 1.3 | 10.7 ± 2.9 | 3.7 ± 0.7 * | 4.3 ± 0.9 | 0.115 b | 0.132 | |||
| p-value | 0.001 e | 0.014 f | 0.577 f | ||||||
| Pη2 | 0.615 | 0.394 | 0.063 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Ohtonen, O.; Ruotsalainen, K.; Kettunen, L.; Lindinger, S.; Göpfert, C.; Linnamo, V. Propulsion Calculated by Force and Displacement of Center of Mass in Treadmill Cross-Country Skiing. Sensors 2022, 22, 2777. https://doi.org/10.3390/s22072777
Zhao S, Ohtonen O, Ruotsalainen K, Kettunen L, Lindinger S, Göpfert C, Linnamo V. Propulsion Calculated by Force and Displacement of Center of Mass in Treadmill Cross-Country Skiing. Sensors. 2022; 22(7):2777. https://doi.org/10.3390/s22072777
Chicago/Turabian StyleZhao, Shuang, Olli Ohtonen, Keijo Ruotsalainen, Lauri Kettunen, Stefan Lindinger, Caroline Göpfert, and Vesa Linnamo. 2022. "Propulsion Calculated by Force and Displacement of Center of Mass in Treadmill Cross-Country Skiing" Sensors 22, no. 7: 2777. https://doi.org/10.3390/s22072777