1. Introduction
The objective of increasing the throughput at a competitive price in broadband satellite communication systems has triggered investigations of terrestrial solutions in the satellite context. Based on the results of Dirty Paper Coding (DPC) [
1], and the vast exploitation of multiuser multiple-input multiple-output (MIMO) terrestrial systems, a promising technique consists in adopting precoding to cancel the interference, allowing more aggressive frequency reuse schemes for the satellite forward link. The extended version of the digital video broadcasting (DVB-S2X) standard, with its novel superframe structure, supports the implementation of satellite-based precoding [
2]. Research has addressed the application of this technique in single feed per beam (SFPB) antennas [
3,
4,
5]. Many drawbacks of such systems have been highlighted. Due to a limited payload processing capability, precoding has to be implemented at the gateways (GWs); if the GWs are not interconnected, inter-cluster interference arises since each GW can only process a subset of beams, limiting the benefits of precoding [
6]. Precoding relies on the knowledge of the channel matrix; typically, users have to estimate and report the channel state information (CSI) via a return link, which, however, can contain errors and be outdated. Another issue is the non-linearity introduced by the on-board high power amplifiers (HPAs) [
7]; typically, HPAs need to be operated as close as possible to the amplifier compression point to optimize power efficiency [
8]. The application of precoding may change the power assigned to each antenna feed depending on the channel characteristics, making the back-off requirement harder to satisfy. Recently, the concept of massive MIMO employing active antennas is also being analyzed for applicability in satellite communications [
9,
10] and, in general, in non-terrestrial networks (NTNs) [
11]. The difficulties that have been summarized are even more challenging for massive MIMO systems; for example, the CSI should be estimated at the receiver and signaled back to the GW individually for each feed of the large-scale antenna array. In [
12], a pragmatic approach for exploiting massive MIMO with much lower complexity than precoding has been introduced; CSI is estimated by modeling the antenna pattern and the downlink channel for a fixed set of beams. The precoding/beamforming coefficients are computed based on these fixed pointing directions. By properly scheduling the users to be served in a time division multiplexing (TDM) scheme, it is demonstrated that such a pragmatic solution can achieve a performance close to traditional precoding techniques. In a similar manner, in this paper, we are interested in pragmatic applications of precoding to satellite MIMO systems and we consider ideal, previously estimated CSI characteristics to assess the proposed power normalization techniques in a reference scenario employing open-loop precoding strategies.
The active antenna considered in this paper is based on an array fed reflector (AFR) configuration with distributed amplification. Such antenna architecture provides high directivity and flexibility at a moderate complexity and cost [
13], and is the preferred solution for next-generation software-defined satellites in geosynchronous orbit (GEO). Despite these advantages, the optics inevitably lead to higher scan losses [
14,
15]. This is particularly evident in the hybrid optics described in [
16,
17], with higher scan losses in the imaging plane compared to the focusing plane. The directivity degradation at increased pointing angles is predominantly due to spill-over losses and optical aberrations. Possible methods to mitigate this issue are based on shaping the AFR geometry to obtain an isoflux-like performance, and are described in patent [
18]. System performances are driven by the power flux density achieved across the service area, which is a combination of antenna gain and payload power distribution. Thus, the correction proposed at the antenna level in [
18] could equally be considered at the payload level.
In this paper, we explore the possibility of recovering scan losses at the payload level by computing suitable precoding/beamforming weights that will assign more power to users located in beams with higher depointing angles, thereby equalizing the received signal-to-noise ratio (SNR). Combined with a user scheduling protocol, the proposed techniques consistently reduce signal-to-noise plus interference (SNIR) variability, hence providing a similar quality of service among users. The proposed methods also consider free space losses (FSL), that, like scan losses, are greater towards the edge of coverage. Zero forcing (ZF), minimum mean squared error (MMSE), and matched filtering (MF) are considered for obtaining the precoding/beamforming matrix prior to normalization. It has to be highlighted that ZF and MMSE performance are not achievable in practice due to the aforementioned drawbacks; however, these precoding techniques are common in MIMO systems and they are evaluated to provide reference upper bounds. MF can be adopted in actual satellite MIMO systems following the pragmatic approach in [
12].
In [
19], a power normalization after precoding, referred to as CTTC, is introduced to satisfy the power per feed constraint and to exploit all available power at the cost of some co-channel interference. Whilst the performance in terms of sum rate is favorable, with this approach, the SNIR towards the edge of coverage is consistently compromised. Here, we propose three pragmatic normalization techniques that maintain a uniform power per feed whilst providing similar sum rates and, together, a more fair SNR and SNIR distribution across the full earth coverage. A first approach, in the remaining referred to as Loss Mitigation, makes use of the known antenna characteristics, in this case the designed AFR, to manipulate the precoding matrix. The second approach, SNR Equalization, targets an equal received power per user. Similarly, the last approach, Strict SNR Equalization, relaxes the power per feed constraint to provide exactly the same SNR per user; in this case, the constraint per feed is not satisfied. However, we will show in
Section 4 that the variability of the power per feed is drastically reduced. Typically, the joint power per feed and equal SNIR constraint is treated introducing an optimization problem that requires iterative algorithms to be solved [
20]. In [
21], the general non-convex optimization problem to maximize the minimum SNIR, max-min SNIR, under equal power per feed constraint is expressed and is reformulated as a convex one that can be solved via iterative algorithms. In [
22,
23], optimization problems targeting desired performance are investigated under a sum power constraint. We demonstrate that by employing the proposed closed-form techniques, with proper user scheduling, fairness can be increased without significant additional complexity. In [
24], pragmatic solutions to power normalization problems are analyzed for various precoding techniques. However, the effect of the user scheduling on SNIR variability has not been treated and the system assumptions refer to terrestrial MIMO applications.
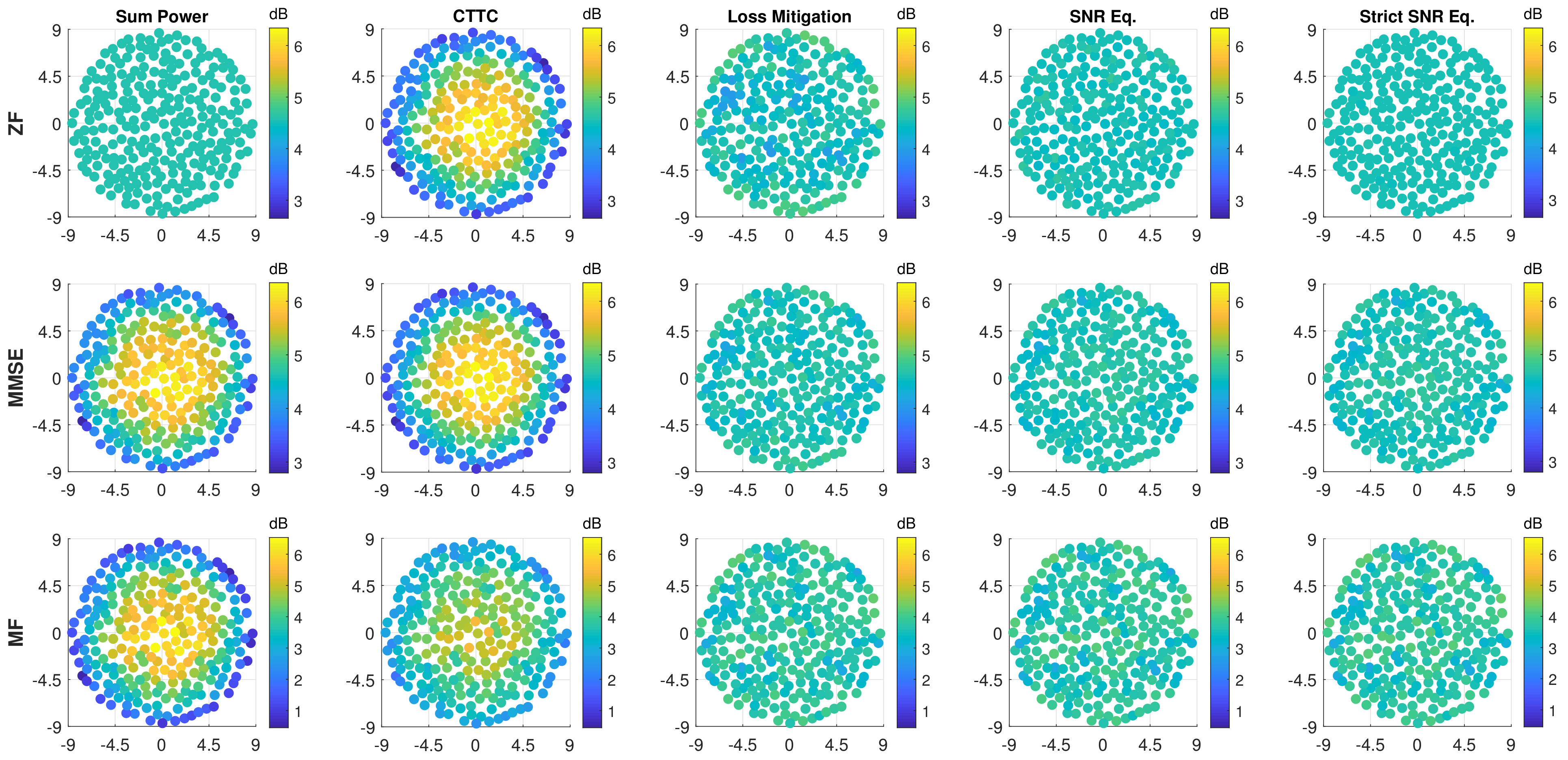
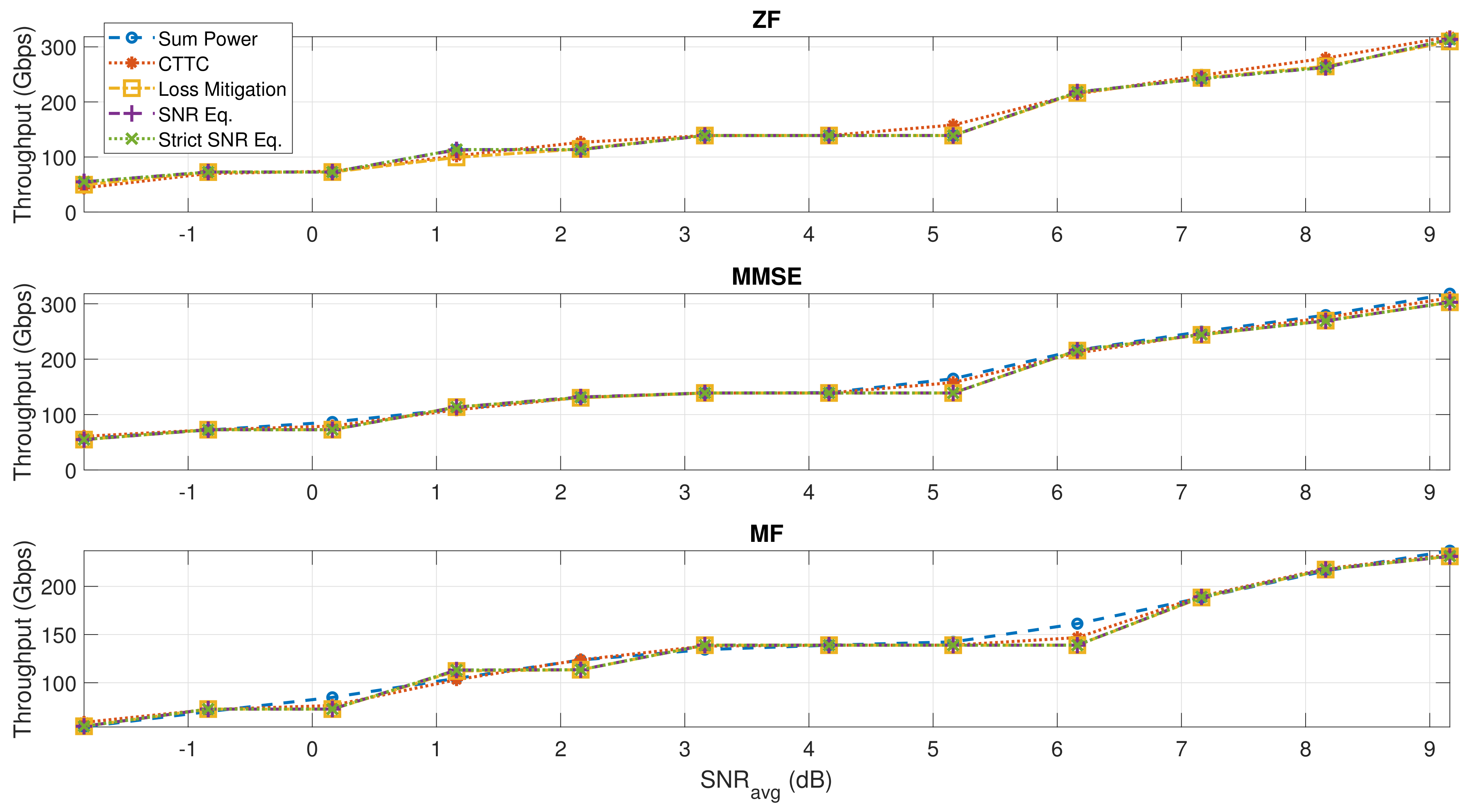
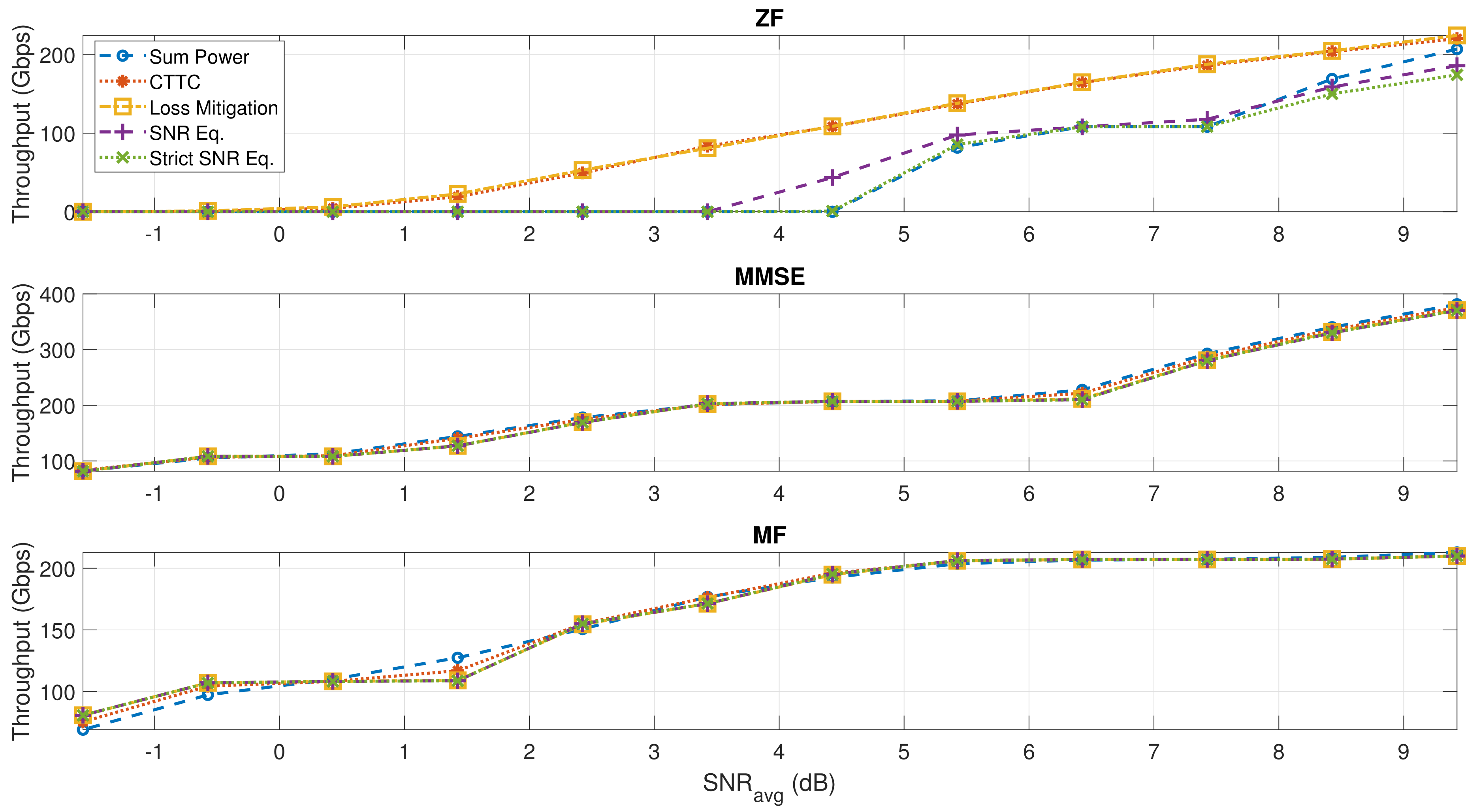
The impact of the normalization techniques on system performance, combined with the different precoding schemes, are analyzed in terms of received SNR and SNIR per user; it is shown that by using Sum Power and CTTC, the performance is highly correlated with the geographical location of users and can be drastically equalized by adopting the proposed methods. At different noise levels, the total throughput, SNR, and SNIR variability among users are evaluated using a Monte Carlo approach. It is shown that the iso-flux-like characteristic and a more uniform SNIR among users are obtained in all the analyzed scenarios, while the total throughput is not compromised. The main contributions of this work can be summarized as follows:
Application of precoding to AFR antennas in a broadband satellite MIMO system;
Introduction of three novel power normalization methods accounting for the signal attenuation towards the edge of the coverage due to the considered satellite communication characteristics;
Demonstration of reduced SNR and SNIR variability among users when combining user scheduling with the proposed power normalization methods;
Analysis of different power normalization methods applied to various linear precoding/beamforming techniques (ZF, MMSE and MF).
The paper is organized as follows. In
Section 2, the system model, user scheduling, and precoding techniques are detailed, together with system assumptions. The normalization methods are described in
Section 3. In
Section 4, the simulation results are presented, and in
Section 5, the conclusions are drawn.
2. System Model
In order to benchmark the proposed methodologies based on precoding matrix normalization, we consider the forward link of a broadband satellite system operating in GEO. The satellite is equipped with an AFR having distributed amplification (here, assumed to be one amplifier per feed) and an On-Board Processor (OBP) to drive the beamforming network and produce the multibeam coverage. The focus is on the downlink path of the system. TDM is considered, such that at each time epoch, a subset of users is served, thus adopting a full frequency reuse (FFR) scheme. We assume, for simplicity, a number of users equal to
K and one user per beam. Furthermore, all users are equipped with a single antenna; the transmitting AFR instead possesses
N feed elements, which are used to produce the beams. The antenna geometry is an imaging configuration in which all feeds contribute to each beam. The communication system can be modeled by introducing a MIMO channel model. Denoting
as the
unit energy signal vector intended to users and
as the
precoding/beamforming matrix, the
vector containing the complex signal transmitted by the
N radiating elements is
where
P is the total payload RF power. The received signal vector of
K elements is then
with
being the
channel matrix and
being the
Gaussian noise vector representing receiver noise. We assume, without loss of generality, that each user experiences the same noise power.
2.1. Channel Model
The channel matrix, representing the overall complex transfer function, can be evaluated by taking into account the satellite propagation characteristics. The downlink channel operating under line-of-sight (LOS) is modeled by characterizing the transfer function of each feed element to the desired directions and by including the propagation fading. FSL represents an important fading effect that, like the scan loss, adds another source of gain imbalance, reaching the maximum for users that are located near the edge of coverage. We neglect other sources of perturbation, such as rain fading, and focus on the stationary condition as assumed in [
12].
The characterization of the total field received by the
K users depends on the AFR configuration and is detailed as follows. The AFR considered in this paper has been optimized to provide full earth coverage from GEO and to possess the following characteristics: no feed blockage, reduced size, maximization of directivity, reduced scan loss, and grating lobes. The reflector is illuminated with an array of 511 circularly polarized feeds placed in a hexagonal lattice. The antenna geometry is depicted in
Figure 1 and the design parameters are reported in
Table 1.
This antenna design results in a 3 dB beamwidth of 0.8 degrees, with a peak directivity of 46.5 dB and a maximum scan loss of 2.4 dB.
An in-house tool developed in Heriot-Watt University is used to characterize the AFR antenna [
25]. This tool uses Physical Optics (PO) to obtain the far field of every feed in the required directions and implements acceleration methods to reduce the computational effort [
25,
26]. In this paper, the far field of every feed is computed for a fixed set of points. Next, interpolation is performed to estimate the complex copolar component in every user direction. This method accelerates the estimation of the channel matrix, which is required in every simulation.
Let
K be the number of users to be simultaneously served in a time slot, represented as
K points in a
satellite coordinate system. The corresponding component of the far field for the point
is computed for each of the
N feeds. These computed values can be disposed to form a
matrix
, with
and
, where [
12]:
represents the transfer function from antenna feeds to users in the far field without any channel fading. In order to include the FSL, let
be the vector with
K elements, representing the FSL for each user, computed as [
27]:
with
being the wavelength and
being the distance satellite-user. The overall channel matrix from feeds to user can then be modeled as
where the
operator applied to a vector returns a square matrix having the vector elements in the diagonal, and the square root of
indicates the element-wise operation. The set of
K users, defining the user distribution and, hence, the channel matrix that is used in each Monte Carlo iteration is based on the results of [
12], where it is found that separating the users by a minimum distance, the Poisson disk radius, brings substantial benefits in terms of system performance. While the Poisson disk distribution is impossible to achieve in practice, a similar performance can be achieved with appropriate RRM techniques as shown in [
28]. In this paper, to avoid the need of performing an RRM optimization at each simulation, we generated an approximate Poisson disk distribution by sampling a larger set of points uniformly distributed in the region of interest (ROI), corresponding to the satellite coverage region. The algorithm to perform the sampling that ensures a minimum distance between users is detailed in [
29].
2.2. Precoding
To compute the precoding/beamforming matrix from the modeled channel matrix, we focus on linear techniques that, even if sub-optimal, provide significant capacity improvement without requiring the processing complexity of non-linear techniques [
30] and constitute a practical choice for satellite systems [
31]. In the following, three linear precoding methods are described; the resulting
matrix is denoted
and the techniques are identified by related subscript. The following precoding methods do not account for payload power limitations, so a further step is required to obtain the precoding matrix
of Equation (
1).
ZF precoding is an effective way of canceling the interference between users. By inverting the channel, the received signal is forced to be as close as possible to the desired transmitted signal
. The effect is that nulls are placed in the interference directions. If the channel matrix is full rank, the ZF precoding weights can be obtained by [
32]:
where
denotes the Hermitian transpose of
. In general, it can be derived as the Moore–Penrose pseudo inverse
. ZF precoding allows the users to recover their intended signals without interference from other beams. However, in [
33], it was proved that ZF can cause a major degradation of system performance, especially in scenarios with a high number of users and noise. Another practical choice is to relax the condition of having zero interference for all the receivers by regularizing the inverse, adding a scaled identity matrix before inverting. The regularized inversion was introduced in [
33] and can also be obtained from Minimum Mean Square Error (MMSE) optimization problems [
34,
35]. The MMSE precoder is computed as
where
is the regularization factor. An optimization problem can be formulated based on various criteria; in [
33], the optimal factor to maximize the SNIR at the receivers was derived as
, where
is the noise variance.
The last precoding/beamforming technique considered is MF; this beamforming technique maximizes the gain of the array towards the users, and can be interpreted as steering the beams in the user directions [
36]. However, it does not take into account any interference mitigation. The beamforming matrix is computed as [
37]:
Even if it does not take into account interference or noise, it is a very low complexity practical choice and can represent the basis for a pragmatic implementation of Massive MIMO in the satellite context [
12].
The precoding/beamforming matrix needs to be normalized to account for payload limitations, such as total available RF power. Another important aspect is the power variation across the feed array that can be very large when linear precoding is used, resulting in some HPAs operating at high backoff. This reduces the efficiency of the DC to RF power conversion and constitutes an important draw-back of precoding application [
7]. In the following, we focus on power normalization criteria that assign uniform power among antenna feeds at the expense of some co-channel interference. In [
19], a matrix normalization satisfying this requirement, named CTTC, was introduced and in [
12], it was shown to provide excellent performance compared to other normalization techniques in various scenarios. In this paper, we also include Sum Power normalization as a benchmark, corresponding to the simple normalization of the precoding matrix to satisfy the sum power constraint. The normalized precoding/beamforming matrix will be denoted by
, in accordance with Equation (
1).
Given the total satellite power, P, the effective power allocated to users and antenna feeds can be derived from
and represented as vectors of
K and
N elements, respectively, as
where
for
and
.
represents the
k-th column vector of matrix
,
the
n-th row, and
the Euclidean norm operator. All normalization methods require that
so the total power constraint is satisfied. The power per feed constraint has the simple form
, for each
n, where
is the power constraint on the
n-th feed; we consider the case where each feed has the same constraint, hence
. The normalization can follow different strategies that are detailed in the next section. Given a normalized matrix
, we can express the formulation of signal-to-noise, interference-to-noise, and signal-to-noise plus interference ratio experienced by user
k as [
4,
12]
where
is the noise power density and
the total bandwidth. Once the
for each user is obtained, the throughput is derived from the spectral efficiency table of the DVB-S2X standard [
31]; hence, the total throughput is
In
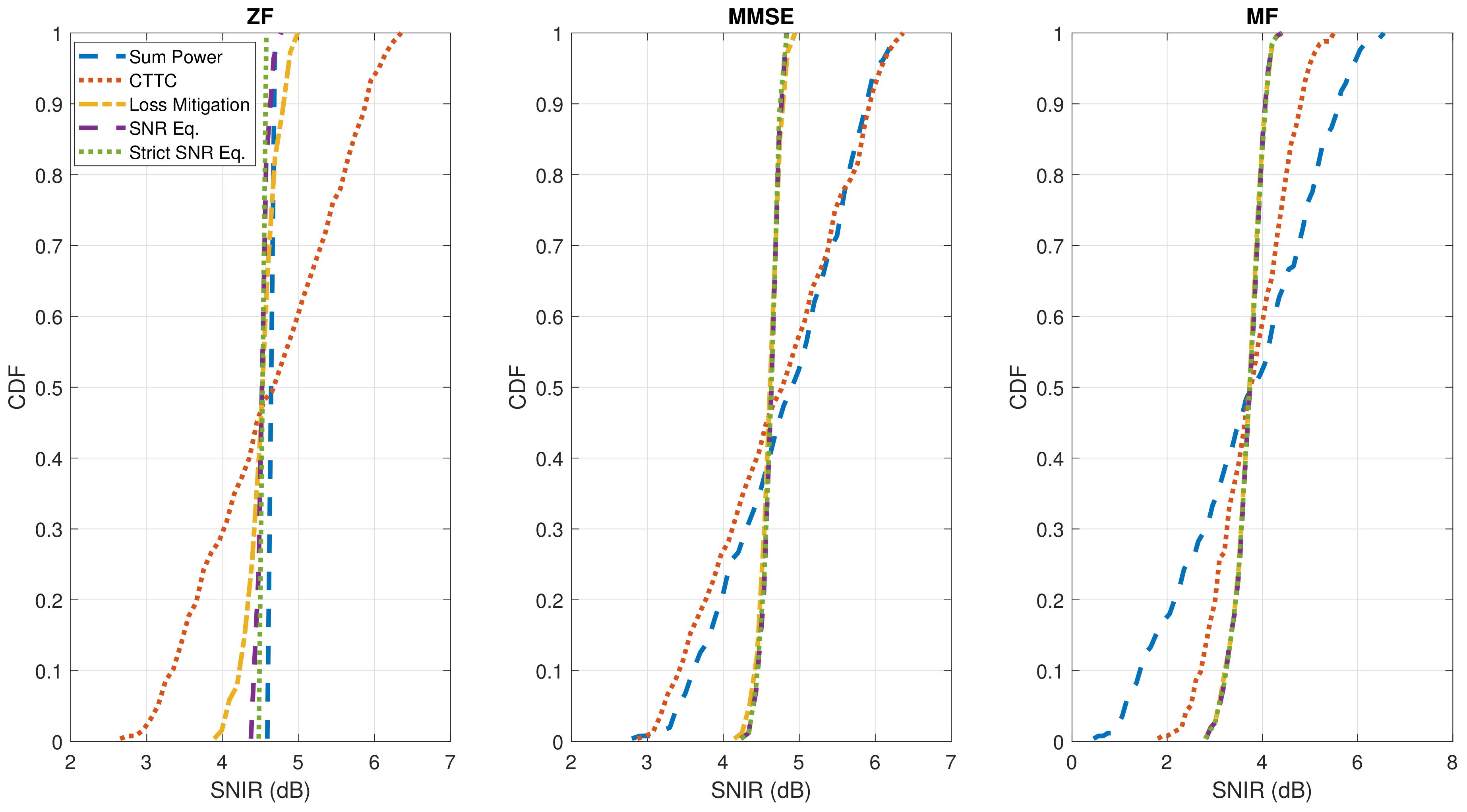
Section 4, the performance of the proposed methods will be evaluated in various interference and noise scenarios. In order to demonstrate the reduced SNR and SNIR variability, obtained by the precoding and matrix normalization methods in the simulated scenarios, we will present their Cumulative Density Function (CDF) and dynamic ranges, i.e.,
and
, respectively. The steps to produce these results are summarized in Algorithm 1. The number of feeds (
) is fixed by the chosen antenna configuration, as well as the parameters reported in
Table 1.
| Algorithm 1 Iterative evaluation of performance results. |
- Input:
K, P, , - 1:
for all Monte Carlo iterations do - 2:
Generate a large set () of uniformly distributed [u,v] points in the ROI. - 3:
Sample the uniform set to obtain the approximated Poisson distribution of K points, as described in [ 29]. - 4:
Compute the far field related to feed n and point for all and , as described in [ 26]. - 5:
Compute the free space loss using Equation ( 4) for all . - 6:
Obtain the channel matrix , Equation ( 5). - 7:
Compute precoding matrices , and , Equations ( 6)–( 8). - 8:
Compute normalized precoding matrices , and for each normalization method detailed in Section 3. - 9:
Compute , , , and for all precoding/normalization combinations, Equations ( 10), ( 11), ( 13), ( 15) and ( 16). - 10:
end for - 11:
Compute the average of the metrics over the number of Monte Carlo iterations. - Output:
average , , , and for all precoding/normalization combinations.
|
5. Discussion
Low complexity normalization techniques that enhance performance fairness, thus reducing SNIR variability by providing an iso-flux-like characteristic, have been introduced. Simulations show that the techniques can be applied to ZF, MMSE, and MF precoding/beamforming methods, and can successfully equalize scan and free space losses induced by the reflector antenna and propagation characteristics.
Combined with the proposed normalization techniques, the performance of ZF and MMSE precoding, given their wide application in MIMO systems, have been assessed to provide reference capabilities; however, such precoding schemes are considered unpractical solutions for satellite systems based on active antennas. In fact, system complexity is highly increased under various aspects and performance advantages are limited, as demonstrated in [
12]; in the same paper, a pragmatic approach based on MF, namely fixed multi-beam (MB), is presented to exploit satellite MIMO systems. The proposed normalization techniques can also be applied to the MB approach, including in satellite communication systems based on Direct Radiating Array (DRA) that can experience non-negligible scan losses [
39]. More broadly, the proposed techniques are applicable to multibeam communication systems relying on line of sight links and typically in mm-wave frequencies. In principle, the methods also apply for non-geostationary orbit (NGSO); nevertheless, the more dynamic channel conditions make the implementation of precoding even more challenging, and pragmatic approaches that do not require channel state information are investigated [
10].
The SNR Equalization and Strict SNR Equalization add another matrix multiplication in the normalization process since the channel matrix is considered to equalize the received power, while the Loss Mitigation method is only based on fixed antenna and propagation characteristics, and, thus, adds no extra processing complexity. However, all three methods, being based on closed-form expressions, are affordable in combination with the mentioned pragmatic MB approach, where fixed sets of beams are considered.
The presented results confirm the equalized signal strength performance experienced by users all over the coverage. In particular, Loss Mitigation adopted after MF provides a good trade-off between performance and complexity: the SNR dynamic range is reduced by more than 3 dB compared to CTTC, and almost 7 dB with respect to ZF, for all noise scenarios (
Table 7). The SNIR distribution obtained with MF-Loss Mitigation also matches the performance when applying SNR Equalization and Strict SNR Equalization for the considered satellite system, resulting in a reference SNR around 5 dB (
Figure 6) with a reduction of the SNIR dynamic range around 3 dB. The benefits of ZF and MMSE on SNIR variability are only visible for higher signal-to-noise levels, in more interference-limited scenarios evaluated (
Table 8).
The analyzed effect on SNIR variability of the proposed normalization techniques in various interference and noise scenarios greatly depends on user locations. As previously noted, a Poisson distribution can be a favorable scenario since it maximizes the minimum distance between users; a more realistic user distribution, while approaching the optimal RRM solution with affordable complexity, can be obtained by applying the heuristic RRM (H-RRM) presented in [
28]. Moreover, non-uniform traffic conditions should be assessed. The analysis of the proposed techniques, providing the iso-flux characteristic, on such scenarios implementing the pragmatic MB approach and the H-RRM constitutes an interesting research direction. Another idea for future work is to combine the proposed concept with more advanced antenna systems, including for instance reflector shaping [
18].


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}