
Identification Method for Internal Forces of Segmental Tunnel Linings via the Combination of Laser Scanning and Hybrid Structural Analysis

Abstract
:1. Introduction
2. Hybrid Structural Analysis
2.1. Assumptions
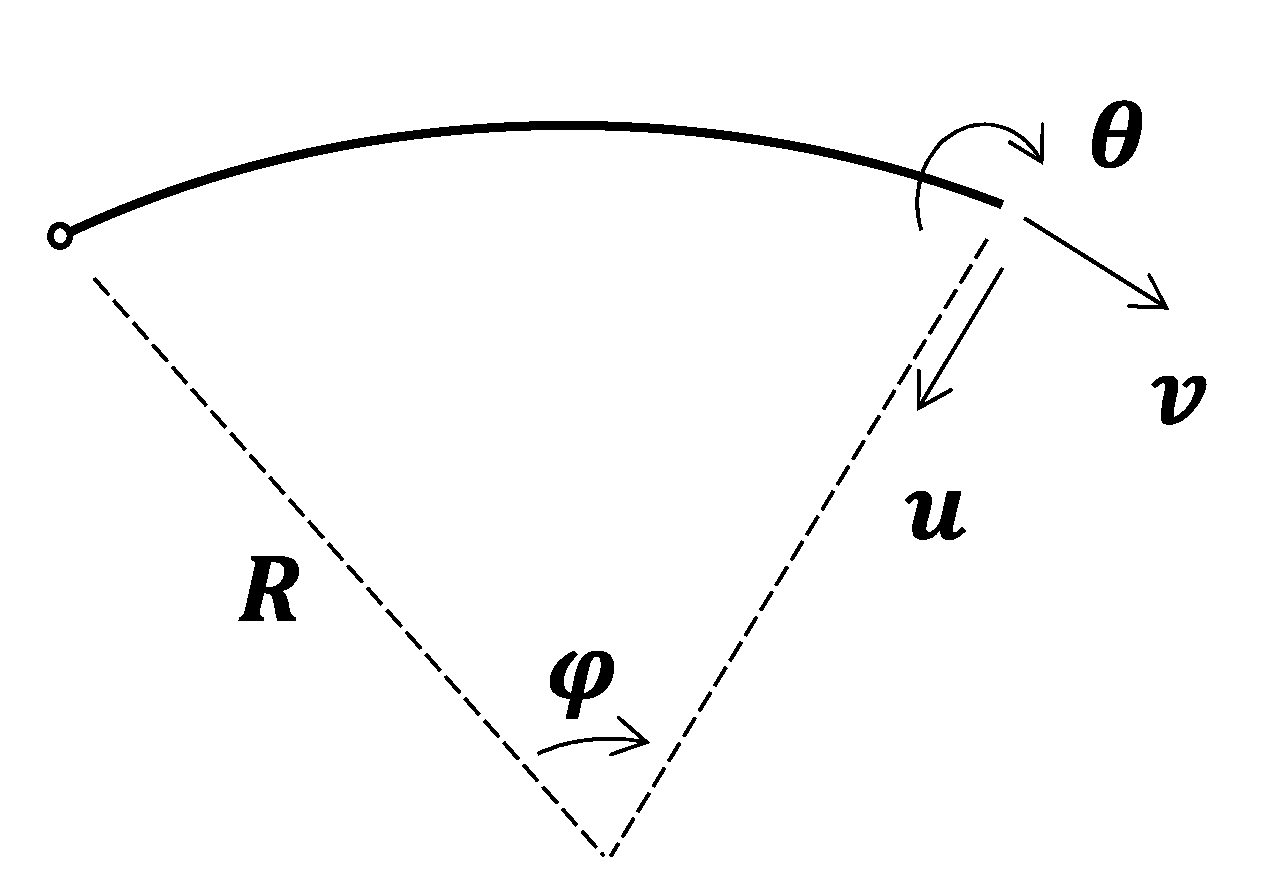
2.2. Procedure for Hybrid Structural Analysis
3. Combination of Laser Scanning and Hybrid Structural Analysis
3.1. Data Acquisition of Laser Scanning
- (1)
- Lack of displacement history
- (2)
- High precision requirement on displacement measurement
3.2. Remedial Solution I—Lack of Displacement History
3.2.1. Philosophy of Remedial Solution I
3.2.2. Additional Assumptions
3.2.3. Procedure for Remedial Solution I
3.3. Remedial Solution II—Poor Precision of Measurements
3.3.1. Philosophy of Remedial Solution II
3.3.2. Additional Assumptions
3.3.3. Procedure for Remedial Solution II
4. Numerical Validation
4.1. A Virtual FEM Test
4.2. Design of Validation
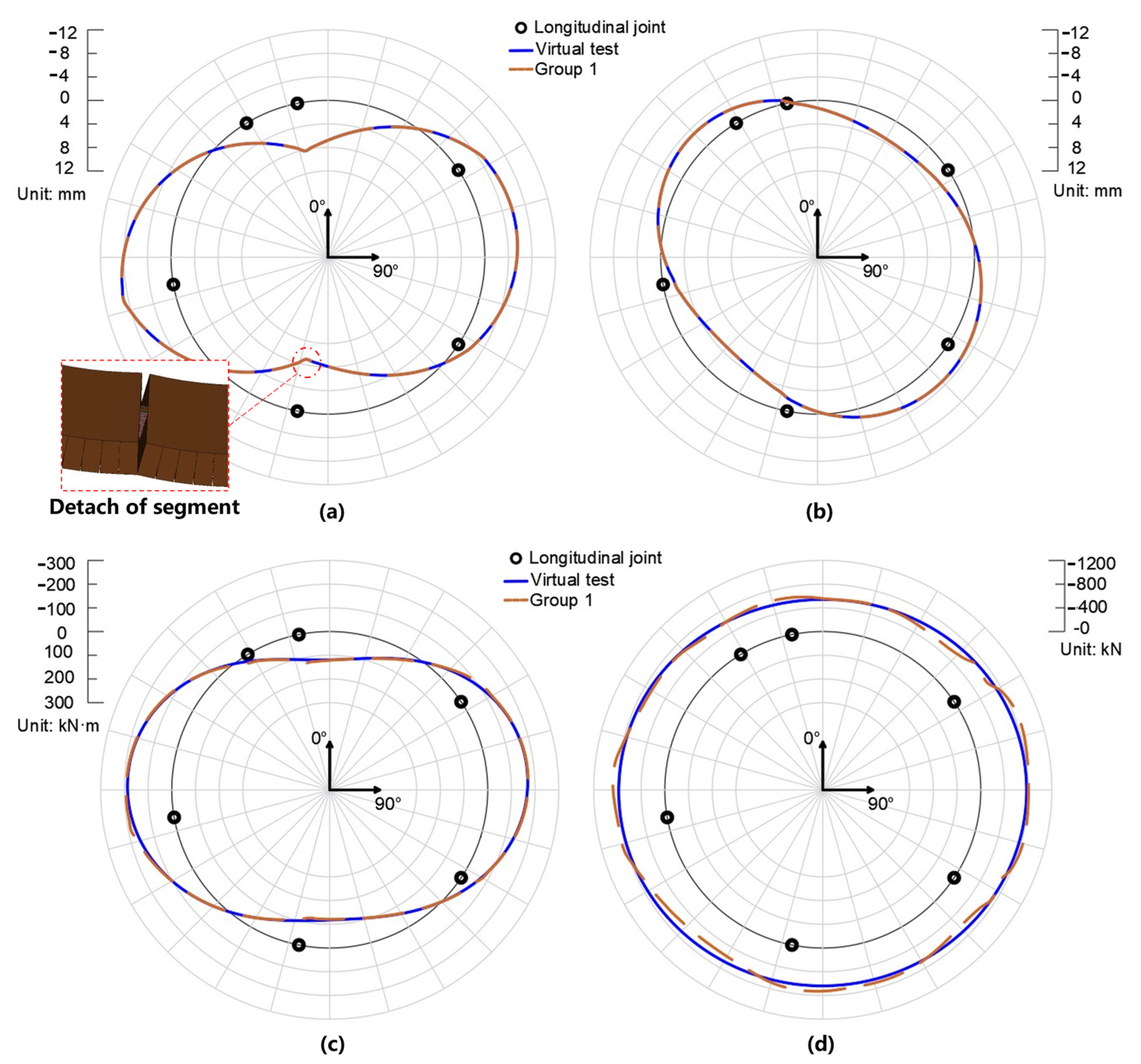
4.3. Validation of Original Hybrid Analysis
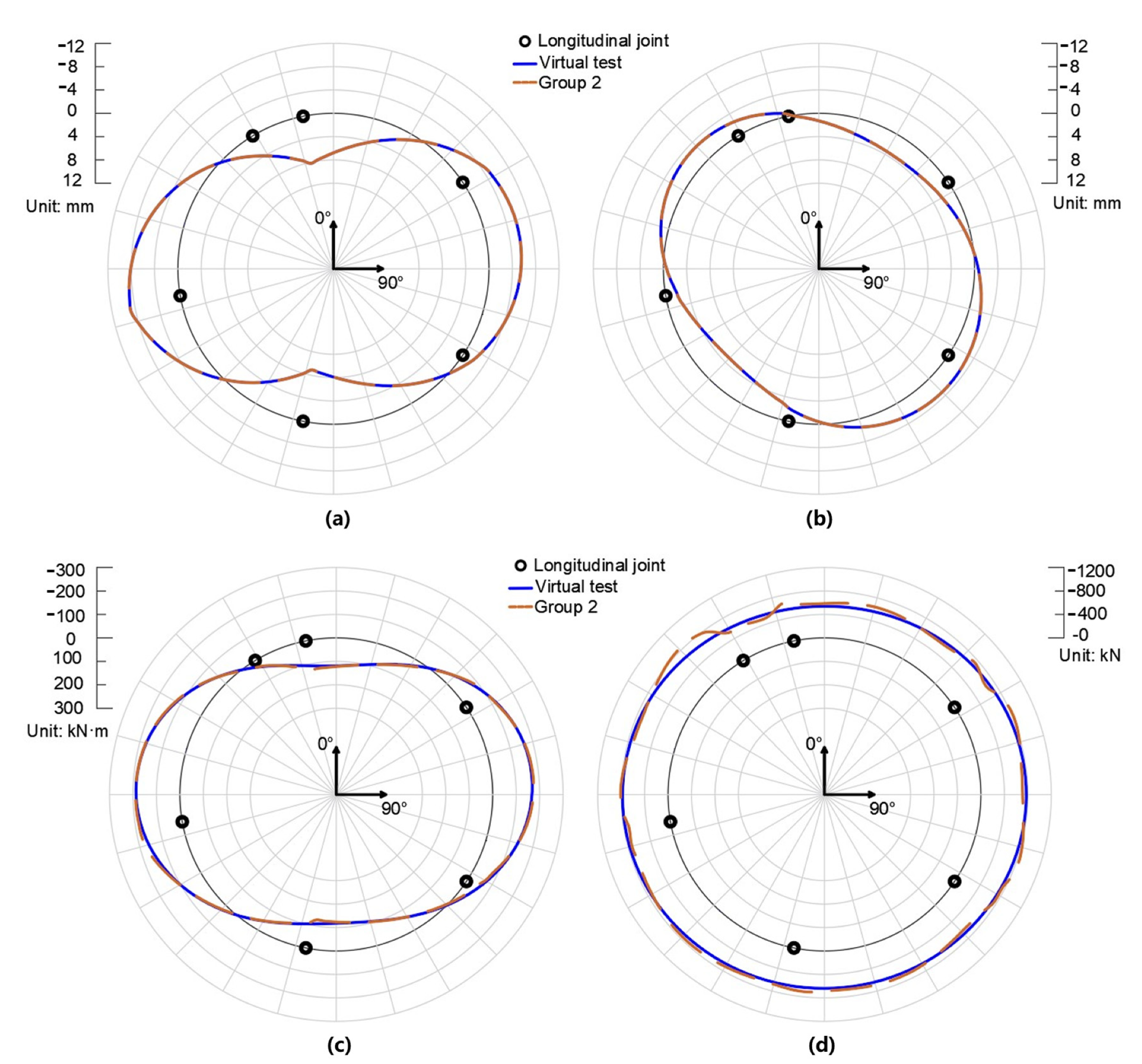
4.4. Validation of Remedial Solution I
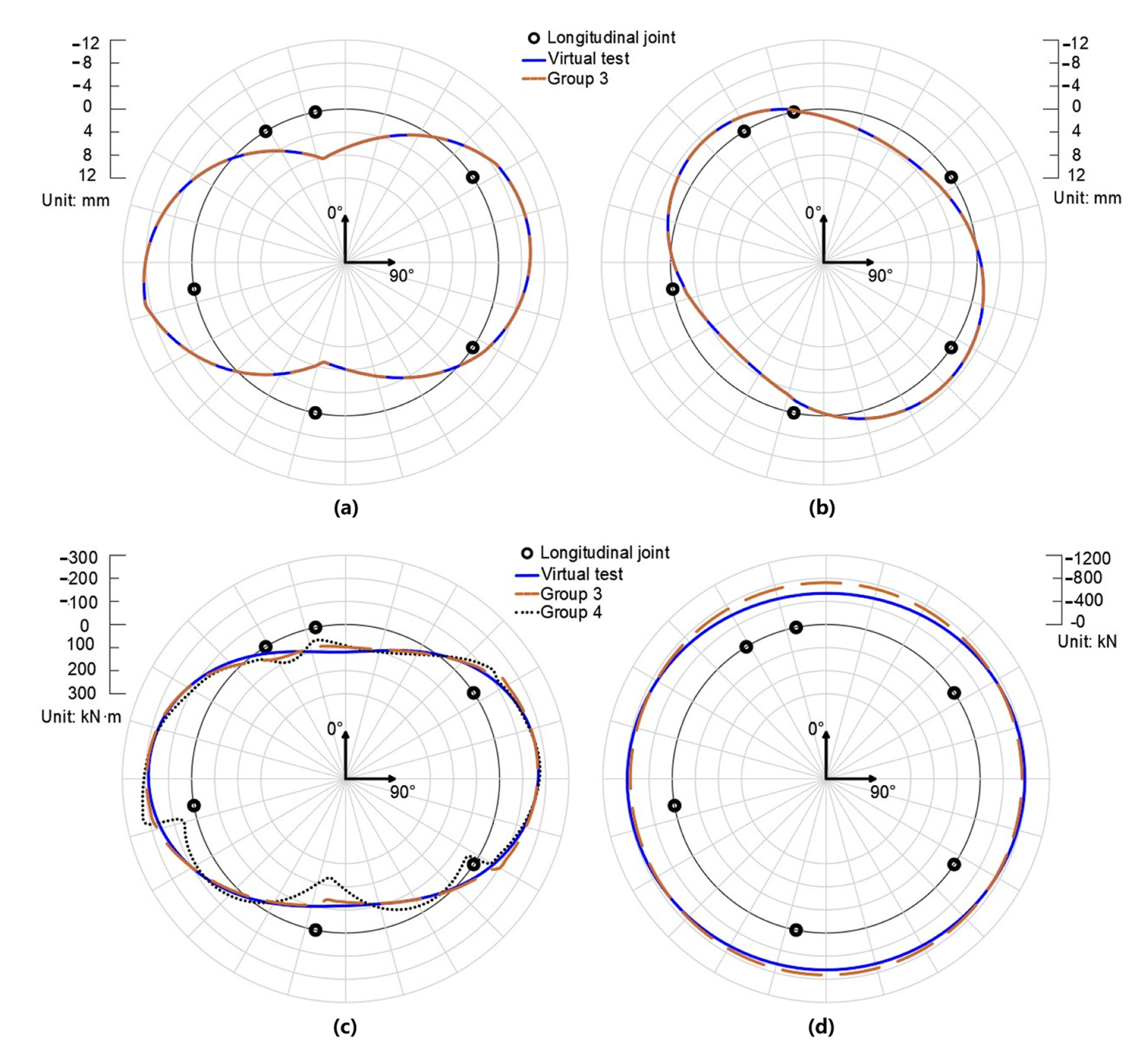
4.5. Validation of Remedial Solution II
5. Parameter Analysis of Measurement Accuracy
5.1. Explanation of Error Propagation
5.2. Definition of Indices
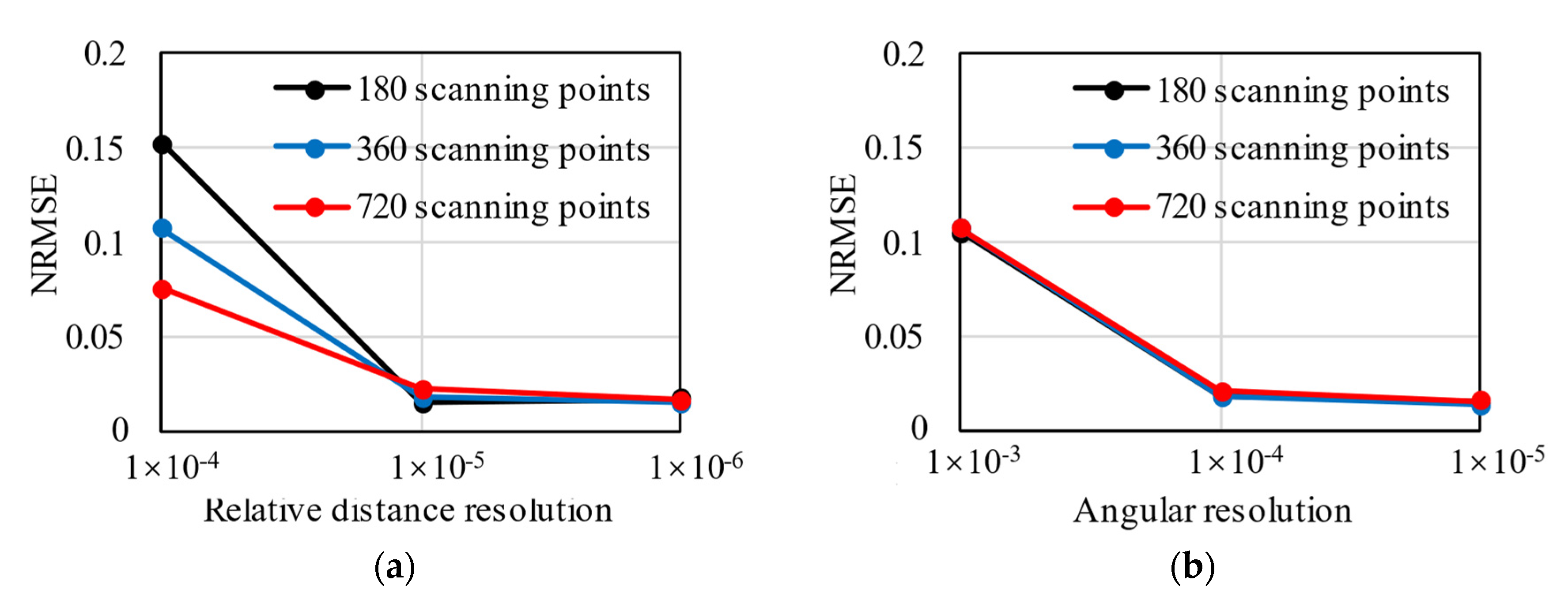
5.3. Resolution of Laser Scanner
5.4. Noise of Measurement
5.5. Advice on Adapting Hybrid Solution
- (1)
- Measurement
- (2)
- Data process
6. On-Site Application
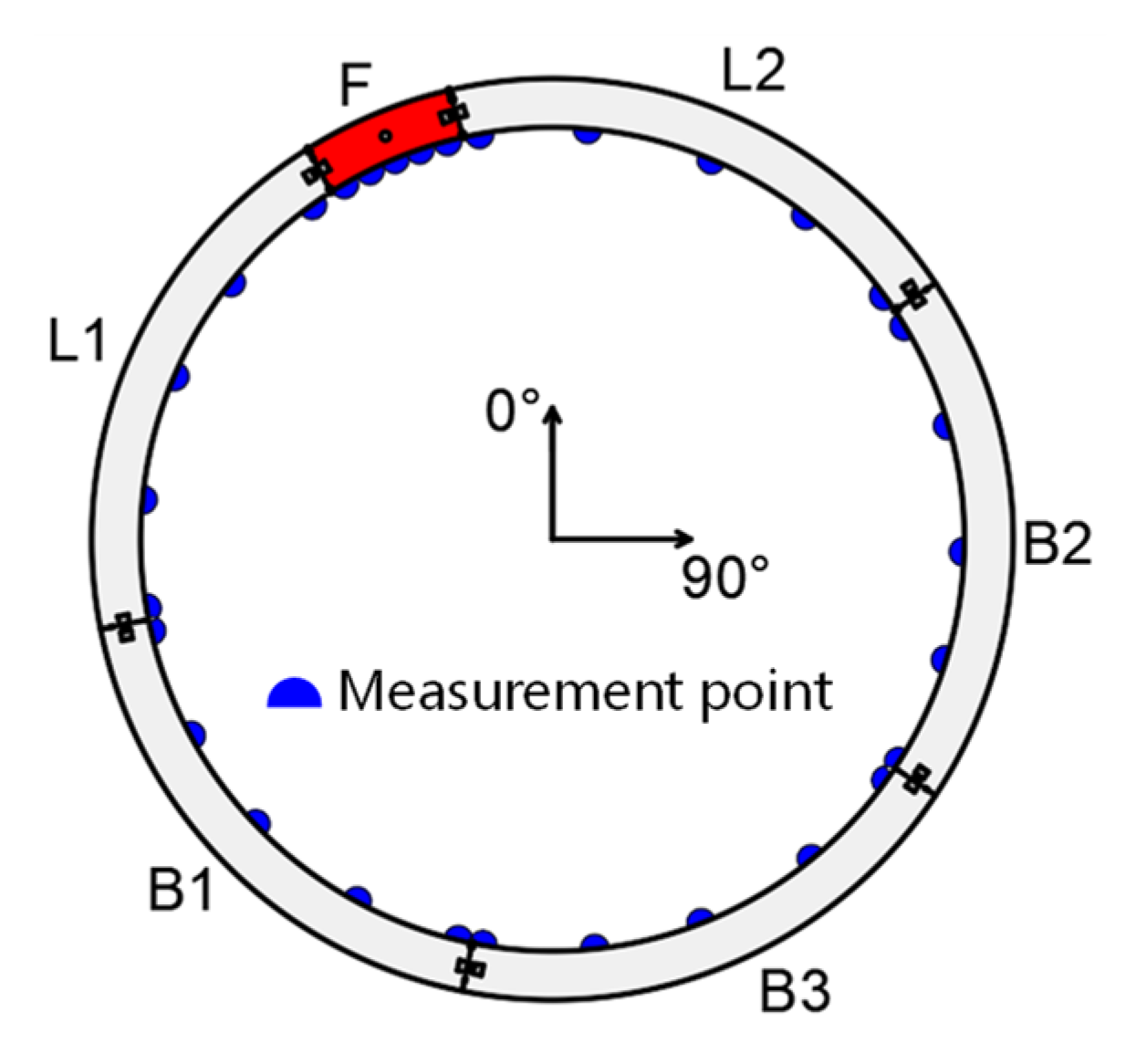
6.1. Introduction of On-Site Application
6.2. Processing of Scanned Data
6.3. Results and Discussion
- (1)
- Only the displacements caused by stress are considered, and the displacements caused by creep and the environment are ignored. Thus, the stress-caused displacement is overrated, which may result in a larger bending moment.
- (2)
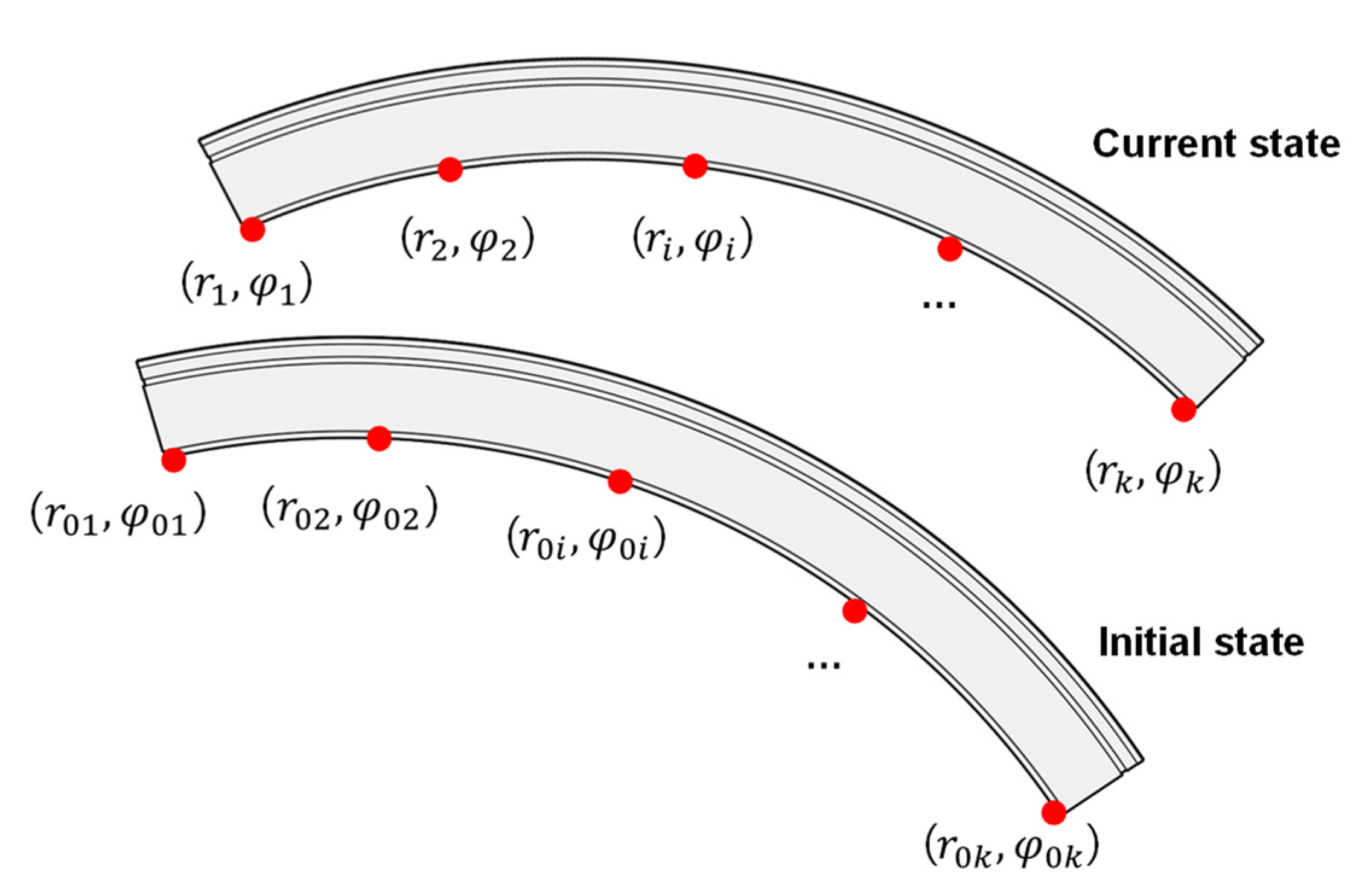
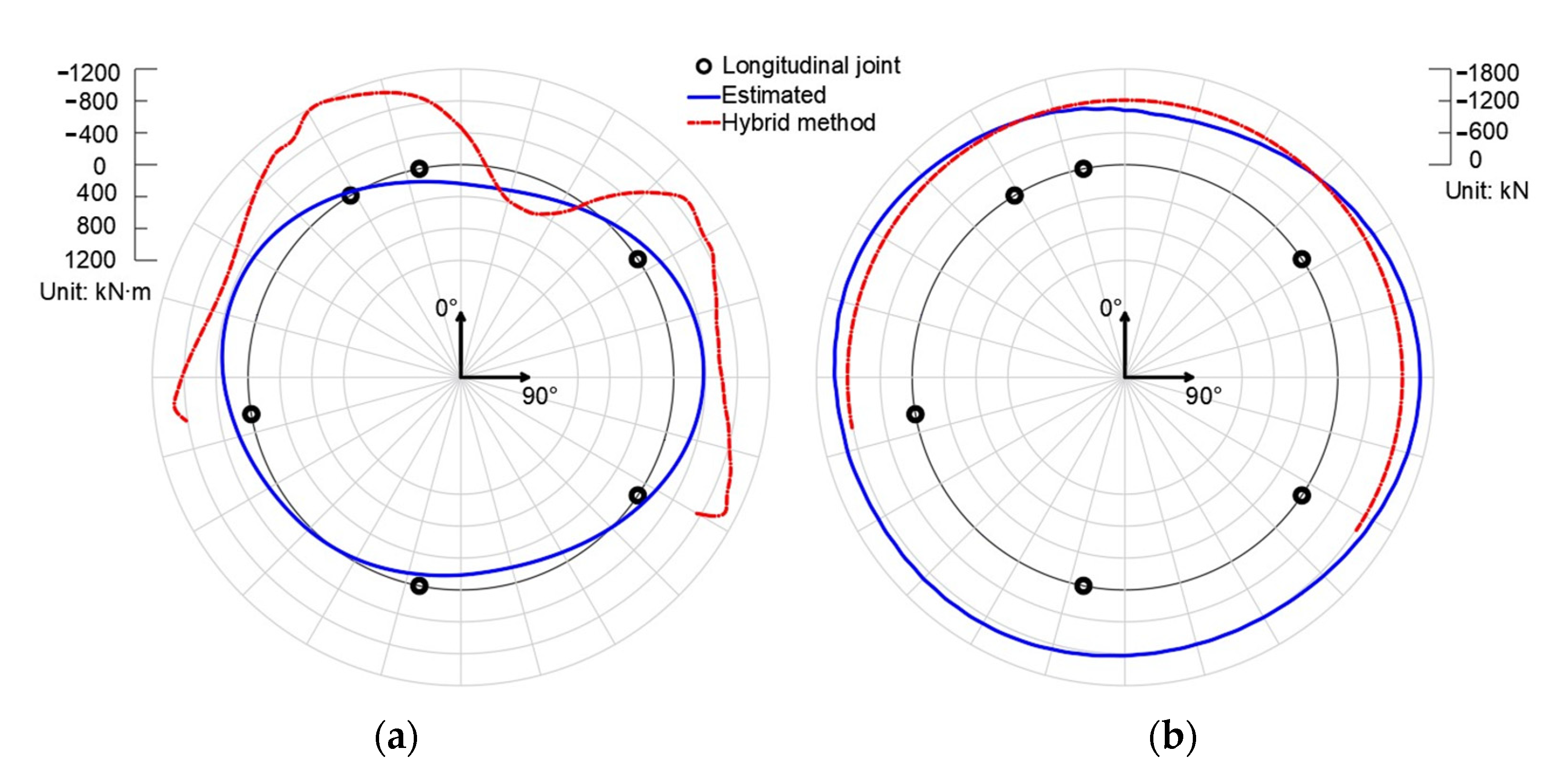
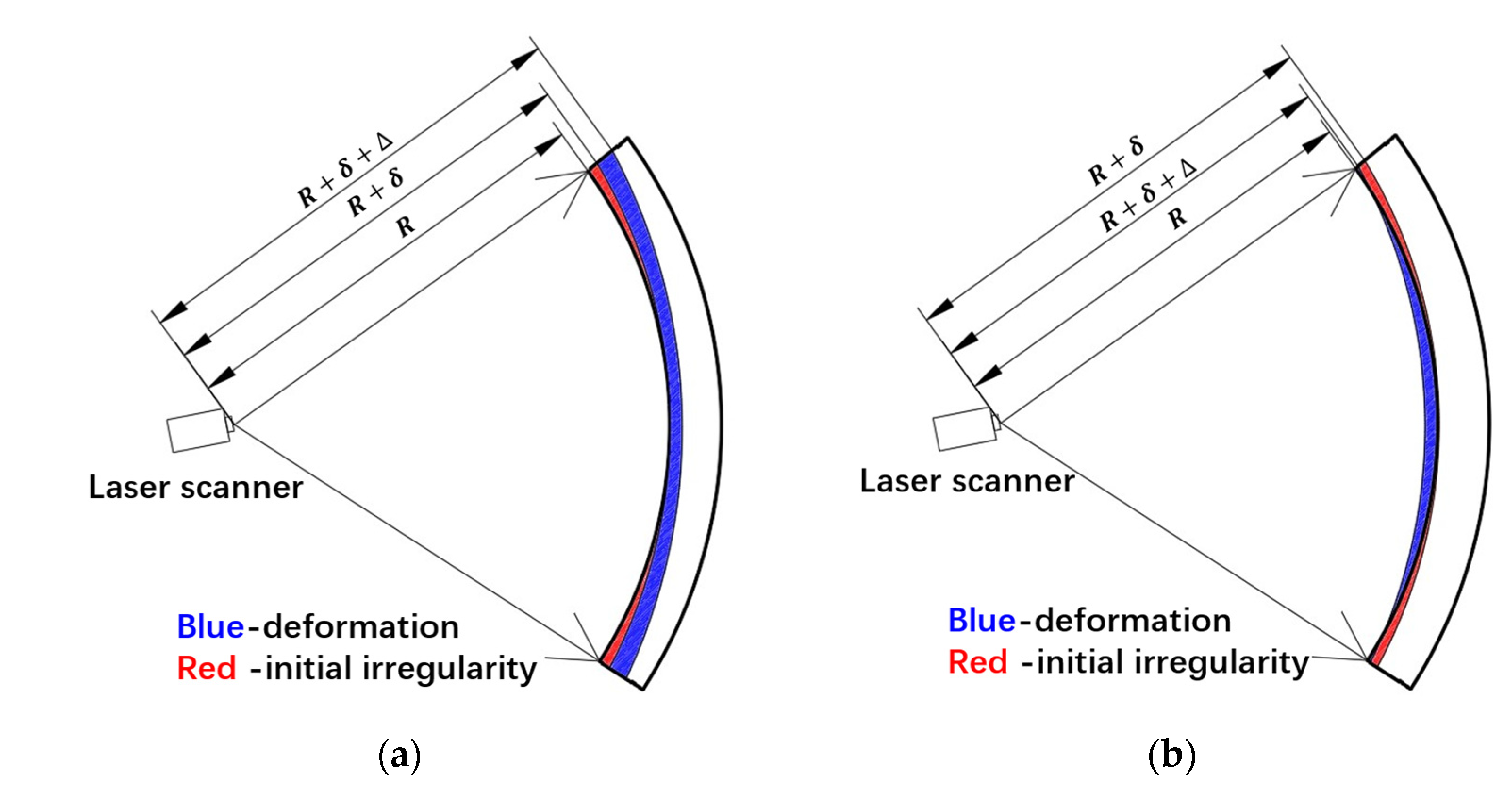
- In the hybrid analysis, the initial shape of the segmental tunnel lining is assumed to be a circular ring, which may differ from the real initial shape, leading to an error of bending moment calculation. As shown in Figure 14a, the bending moment distributions of segment L2, B2, and L1 are similar, where they all activate higher absolute values at two ends of the segment and lower absolute values in the middle. This may be caused by an initial irregularity shown in Figure 15, where the initial radius at the segment end is larger than the designed radius . Because the segments are prefabricated in the same kind of modulus, every segment has identical irregularities. In Figure 15, is defined as the initial irregularity and denotes the real deformation of the segment caused by internal forces. The initial segmental lining is assumed to be a circular ring with designed radius ; thus, the deformation is misrecognized as in the hybrid analysis. For segment B2 and L1, they are at the negative-bending area of the segmental linings, where the deformation is outward along the radial direction. Thus, the misrecognition of as induces a larger bending moment at two ends of the segment. For segment L2, it is at the positive-bending area of the segmental linings, where the deformation is inward along the radial direction. The misrecognition of as compensates for the deformation to some extent, causing a narrower positive-bending area.
7. Conclusions
- (1)
- The original hybrid analysis is built based on the displacement-controlled finite element method, where radial displacement, tangential displacement, and rotation are employed as input. A trigonometric function is recommended by the authors to predict the displacement of unmeasured nodes. The correctness of the original hybrid solution relies on high accuracy of displacement data acquisition.
- (2)
- The remedial solution I, designed for a lacking development process of deformed configuration, allows the backtracking of the displacement based on a deformed tunnel profile. Remedial solutions II are proposed for adopting the hybrid method at the condition of poor measurement precision. These two remedial solutions provide the feasibility to combine the hybrid method and laser scanning.
- (3)
- Both the original hybrid method and remedial solution I and II agree well with the results of the virtual test, except for the slight deviation of the bending moment in the vicinity of longitudinal joints, which is due to the natural discontinuity of the reconstructed displacement field. Even so, the rationality of the original hybrid method and remedial solution I and II is validated.
- (4)
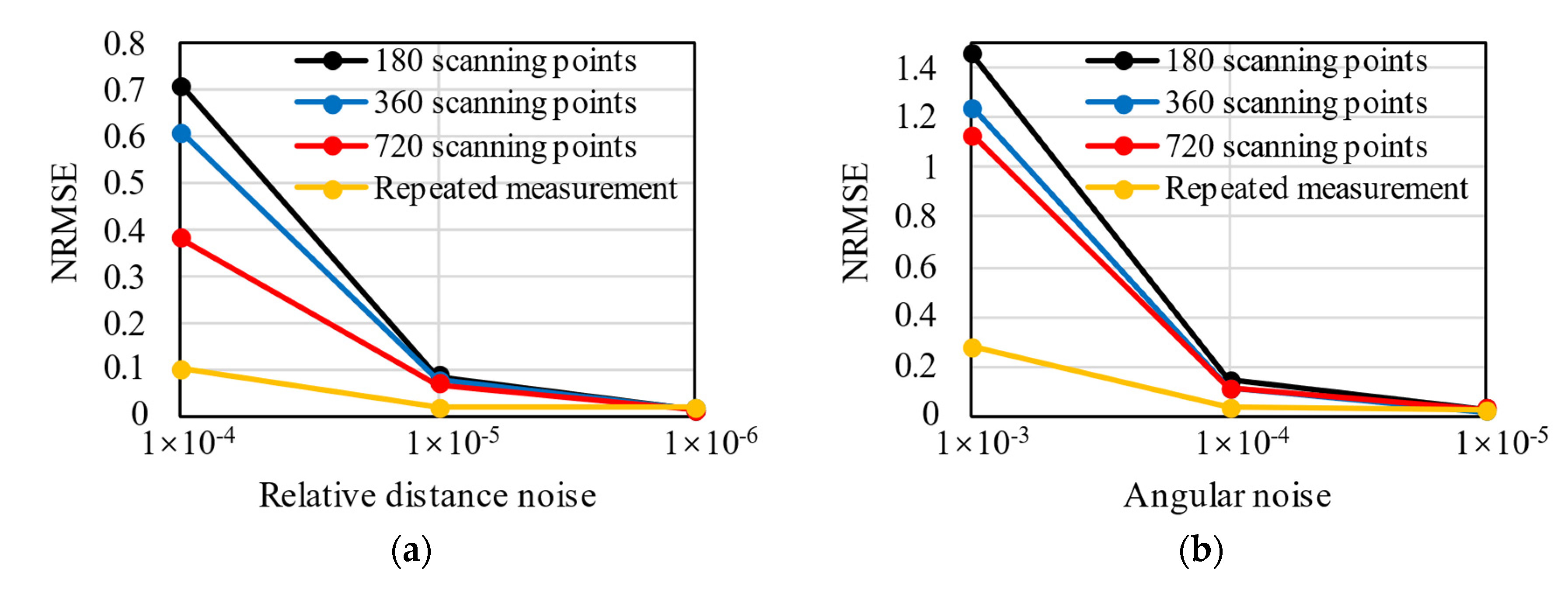
- Parametric analyses were conducted to study the error propagation from laser scanning to hybrid analysis. According to the results, a relative distance resolution less than 1 × 10−4 and an angular resolution less than 1 × 10−3 are preferable for adapting the hybrid analysis on-site with laser scanning. A larger density of scanning point clouds and repeated measurements are favored, since they contribute to more accurate results of the hybrid analysis.
- (5)
- Combination of hybrid analysis and laser scanning was conducted in a metro tunnel in China. The bending moment of the hybrid method is not as consistent with the estimated one as expected. It may be due to (1) ignoring the displacement caused by creep and the environment; (2) the imperfect manufacture of the segment. This will be further discussed in the authors’ future research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Proportionally Changing Arc Length between Measurement Points

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Arcs | Original Arc Length [mm] | Deformed Arc Length [mm] | % |
|---|---|---|---|
| 1 | 163.625 | 163.619 | −0.003% |
| 2 | 163.625 | 163.619 | −0.003% |
| 3 | 163.625 | 163.619 | −0.003% |
| 4 | 163.625 | 163.619 | −0.003% |
| 5 | 163.625 | 163.619 | −0.003% |
| 6 | 163.625 | 163.619 | −0.003% |
| 8 | 163.625 | 163.619 | −0.003% |
| 9 | 163.625 | 163.619 | −0.003% |
| 10 | 163.625 | 163.619 | −0.003% |
| 11 | 163.625 | 163.619 | −0.003% |
| 12 | 163.625 | 163.619 | −0.003% |
| 13 | 163.625 | 163.619 | −0.003% |
| 14 | 163.625 | 163.619 | −0.003% |
| 15 | 163.625 | 163.619 | −0.003% |
| 16 | 163.625 | 163.619 | −0.003% |
| 17 | 163.625 | 163.619 | −0.003% |
| 18 | 163.625 | 163.619 | −0.003% |
| 19 | 163.625 | 163.619 | −0.003% |
| 20 | 163.625 | 163.619 | −0.003% |
| 21 | 163.625 | 163.619 | −0.003% |
| 22 | 163.625 | 163.619 | −0.003% |

Appendix B. List of Symbols
| Abbr. | Meaning | Abbr. | Meaning |
|---|---|---|---|
| A1~A5 | Assumptions of hybrid analysis | S1~S4 | Steps of original hybrid analysis |
| Cross-sectional area of segment | Displacement vector | ||
| Width of segment | Displacement vector of element node | ||
| Undetermined constants for interpolation function | Radial component of | ||
| Undetermined constants for interpolation function | Radial component of | ||
| Undetermined constants for interpolation function | Radial displacement of measurement point | ||
| Elastic modulus of concrete | Errored radial displacement of measurement point | ||
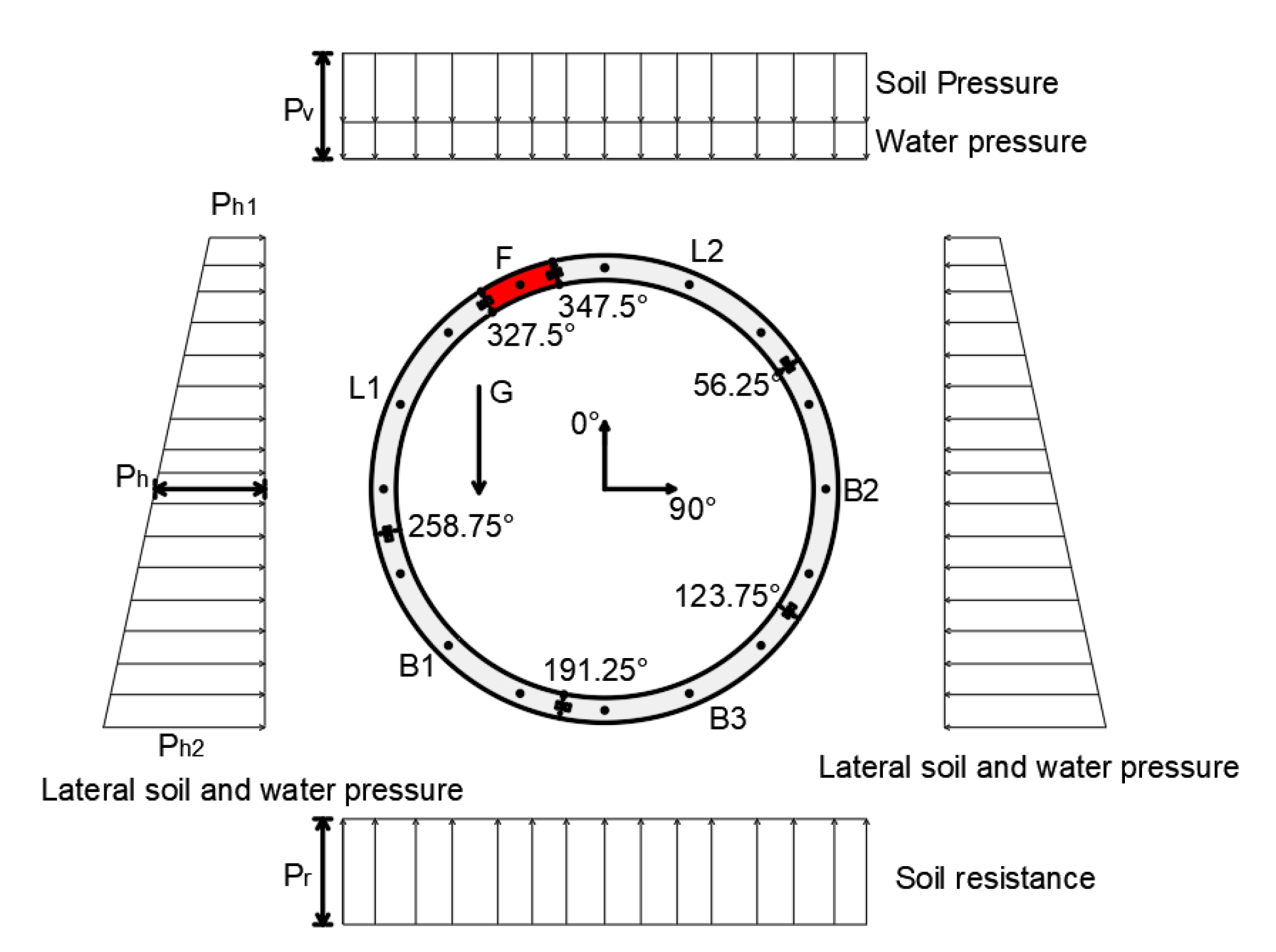
| G | Self-weight of the lining | Tangential component of | |
| Height of each stratum layer | Tangential component of | ||
| Axial force of lining ring | Tangential displacement of measurement point | ||
| Ph1 | Lateral load at crown | Errored tangential displacement of measurement point | |
| Ph2 | Lateral load at invert | Undetermined constants for interpolation function | |
| Pr | Soil resistance | Gravity density of stratum layer | |
| Pv | Vertical load | Cross-sectional rotation | |
| Configuration function of segment | Cross-sectional rotation of element node | ||
| Current radial coordinate of segment | Cross-sectional rotation of measurement point | ||
| Initial radial coordinate of measurement point | Distance noise of laser scanning | ||
| Current radial coordinate of measurement point | Relative distance noise of laser scanning | ||
| Average radius of the lining ring. | Angular coordinate of the polar coordinate system | ||
| Distance resolution of laser scanning | Angular coordinate of element node | ||
| Relative distance resolution of laser scanning | Initial angular coordinate of measurement point | ||
| RS1–RS3 | Steps of remedial solution I | Current angular coordinate of measurement point | |
| RS1’–RS4’ | Steps of remedial solution II |
References
- Yuan, Y.; Bai, Y.; Liu, J. Assessment service state of tunnel structure. Tunn. Undergr. Space Technol. 2012, 27, 72–85. [Google Scholar] [CrossRef]
- ITA. Guidelines for the design of shield tunnel lining. Tunn. Undergr. Space Technol. 2000, 15, 303–331. [Google Scholar] [CrossRef]
- MOHURD. GB50153, Unified Standard for Reliability Design of Engineering Structures; Ministry of Housing and Urban-Rural Construction of the People’s Republic of China, Haidian District: Beijing, China, 2008. [Google Scholar]
- Engen, M.; Hendriks, M.A.; Köhler, J.; Øverli, J.A.; Åldstedt, E. A quantification of the modelling uncertainty of non-linear finite element analyses of large concrete structures. Struct. Saf. 2017, 64, 1–8. [Google Scholar] [CrossRef]
- Tsompanakis, Y.; Lagaros, N.D.; Papadrakakis, M. Structural Design Optimization Considering Uncertainties: Structures & Infrastructures Book; Frangopol, D.M., Ed.; CRC Press: Boca Raton, FL, USA, 2008; Volume 1. [Google Scholar]
- Kong, Y.; Ruan, H.-N.; Huang, X.-F.; Zhu, Z.-D. Field testing of earth pressures in a large-scale natural loess slope. KSCE J. Civ. Eng. 2018, 22, 2266–2273. [Google Scholar] [CrossRef]
- Hellmich, C.; Mang, H.A.; Ulm, F.-J. Hybrid method for quantification of stress states in shotcrete tunnel shells: Combination of 3D in situ displacement measurements and thermochemoplastic material law. Comput. Struct. 2001, 79, 2103–2115. [Google Scholar] [CrossRef]
- Fuentes, R. Internal forces of underground structures from observed displacements. Tunn. Undergr. Space Technol. 2015, 49, 50–66. [Google Scholar] [CrossRef] [Green Version]
- Wenzheng, H.; Linsheng, X.; Lili, W. Theoretical Back Analysis of Internal Forces of Primary Support in Deep Tunnels. J. Eng. Sci. Technol. Rev. 2019, 12, 18–26. [Google Scholar] [CrossRef]
- Lackner, R.; Macht, J.; Hellmich, C.; Mang, H.A. Hybrid method for analysis of segmented shotcrete tunnel linings. J. Geotech. Geoenviron. Eng. 2002, 128, 298–308. [Google Scholar] [CrossRef]
- Zhang, J.-L.; Vida, C.; Yuan, Y.; Hellmich, C.; Mang, H.A.; Pichler, B. A hybrid analysis method for displacement-monitored segmented circular tunnel rings. Eng. Struct. 2017, 148, 839–856. [Google Scholar] [CrossRef]
- Zhang, J.L.; Mang, H.A.; Liu, X.; Yuan, Y.; Pichler, B. On a nonlinear hybrid method for multiscale analysis of a bearing-capacity test of a real-scale segmental tunnel ring. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 1343–1372. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Liu, X.; Schlappal, T.; Zhang, J.-L.; Mang, H.A.; Pichler, B.L. Asymmetric serviceability limit states of symmetrically loaded segmental tunnel rings: Hybrid analysis of real-scale tests. Tunn. Undergr. Space Technol. 2021, 113, 103832. [Google Scholar] [CrossRef]
- Ai, Q.; Yuan, Y. Rapid acquisition and identification of structural defects of metro tunnel. Sensors 2019, 19, 4278. [Google Scholar] [CrossRef] [Green Version]
- Pichler, B.; Hellmich, C. Hybrid methods for shotcrete and segmental linings tunnel shells–Combining displacement and rotation measurements with computational multiscale mechanics: Hybride Methoden für Spritzbeton-und Tübbingschalen–Kombination von Verschiebungs-und Verdrehungsmessungen mit Mehrskalen-Mechanik. Geomech. Tunn. 2018, 11, 226–235. [Google Scholar]
- Liu, X.; Zhang, Y.; Bao, Y.; Song, W. Investigation of the structural effect induced by stagger joints in segmental tunnel linings: Numerical explanation via macro-level structural modeling. Tunn. Undergr. Space Technol. 2022, 120, 104284. [Google Scholar] [CrossRef]
- Dym, C.L.; Williams, H.E. Stress and displacement estimates for arches. J. Struct. Eng. 2011, 137, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Tikoff, B.; Wojtal, S.F. Displacement control of geologic structures. J. Struct. Geol. 1999, 21, 959–967. [Google Scholar] [CrossRef]
- May, I.; Naji, J.; Ganaba, T. Displacement control for the non-linear analysis of reinforced concrete structures. Eng. Comput. 1988, 5, 266–273. [Google Scholar] [CrossRef]
- CJJ/T 164-2011; Standard for Quality Inspection of Shield Tunnel Segment. MOHURD: Beijing, China, 2011. (In Chinese)
- Liu, X.; Dong, Z.; Bai, Y.; Zhu, Y. Investigation of the structural effect induced by stagger joints in segmental tunnel linings: First results from full-scale ring tests. Tunn. Undergr. Space Technol. 2017, 66, 104284. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Bao, Y. Full-scale experimental investigation on stagger effect of segmental tunnel linings. Tunn. Undergr. Space Technol. 2020, 102, 103423. [Google Scholar] [CrossRef]
- Fröhlich, C.; Mettenleiter, M. Terrestrial laser scanning–new perspectives in 3D surveying. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, W2. [Google Scholar]
- Cuartero, A.; Armesto, J.; Rodríguez, P.G.; Arias, P. Error analysis of terrestrial laser scanning data by means of spherical statistics and 3D graphs. Sensors 2010, 10, 10128–10145. [Google Scholar] [CrossRef] [PubMed]
- Seo, H.; Zhao, Y.; Chen, C. Displacement Estimation Error in Laser Scanning Monitoring of Retaining Structures Considering Roughness. Sensors 2021, 21, 7370. [Google Scholar] [CrossRef] [PubMed]
- Iso, I.; OIML, B. Guide to the Expression of Uncertainty in Measurement; JCGM: Geneva, Switzerland, 1995; Volume 122, pp. 16–17. [Google Scholar]















| Parameter | Value | Note |
|---|---|---|
| Pv [kPa] | 193.7 | Vertical load |
| Ph1 [kPa] | 123.7 | Lateral load at crown |
| Ph2 [kPa] | 190.0 | Lateral load at invert |
| Pr [kPa] | 221.1 | Soil resistance |
| G [kN] | 171.9 | Self-weight of the lining (total) |
| Group | Method | Input | Sequence |
|---|---|---|---|
| 1 | Original hybrid analysis | ) | S1→S2→S3→S4 |
| 2 | Hybrid analysis with remedial solution I | ) | RS1→RS2→RS3→S1→S2→S3→S4 |
| 3 | Hybrid analysis with remedial solution II | RS1’→RS2’→RS3’→RS4’→S2→S3→S4 | |
| 4 | Original hybrid analysis | S1→S2→S3→S4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Karlovšek, J.; Liu, X. Identification Method for Internal Forces of Segmental Tunnel Linings via the Combination of Laser Scanning and Hybrid Structural Analysis. Sensors 2022, 22, 2421. https://doi.org/10.3390/s22062421
Zhang Y, Karlovšek J, Liu X. Identification Method for Internal Forces of Segmental Tunnel Linings via the Combination of Laser Scanning and Hybrid Structural Analysis. Sensors. 2022; 22(6):2421. https://doi.org/10.3390/s22062421
Chicago/Turabian StyleZhang, Yumeng, Jurij Karlovšek, and Xian Liu. 2022. "Identification Method for Internal Forces of Segmental Tunnel Linings via the Combination of Laser Scanning and Hybrid Structural Analysis" Sensors 22, no. 6: 2421. https://doi.org/10.3390/s22062421