
Investigation of the Temperature Compensation of Piezoelectric Weigh-In-Motion Sensors Using a Machine Learning Approach

 ,
,  , ,
, ,
Abstract
:1. Introduction
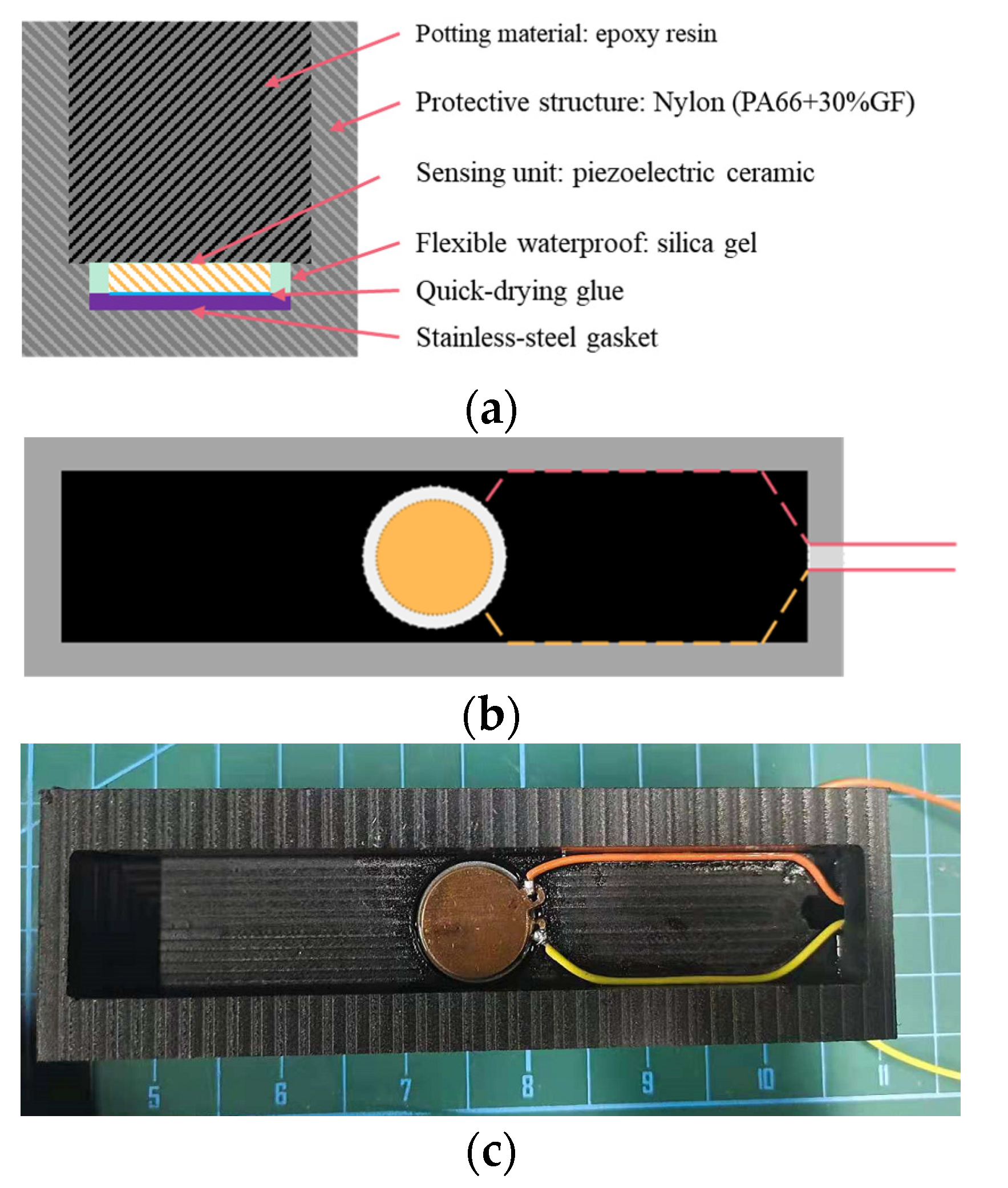
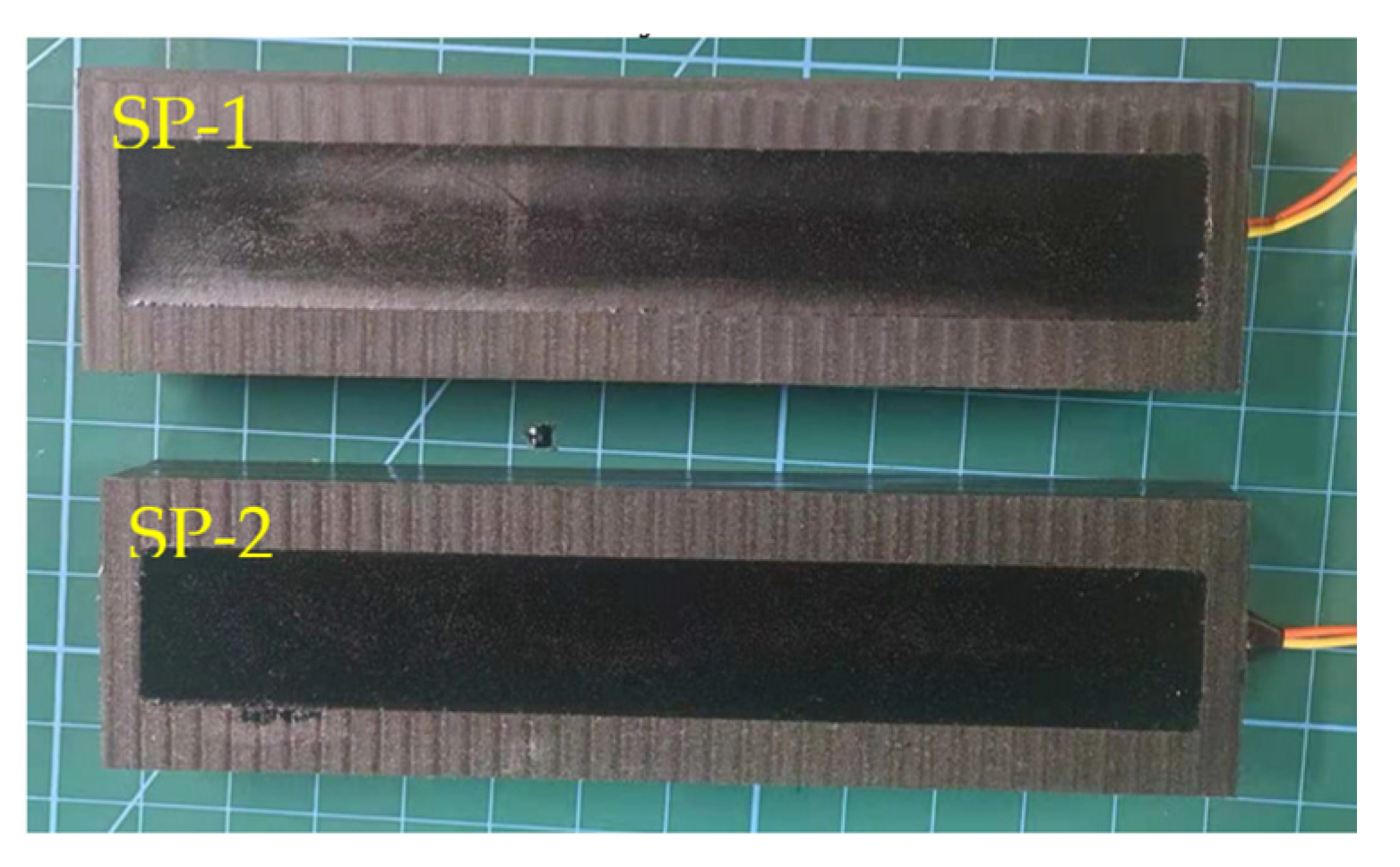
2. Design and Fabrication of Piezoelectric Ceramic Sensor
3. Temperature Characteristics Study of Piezoelectric Ceramics
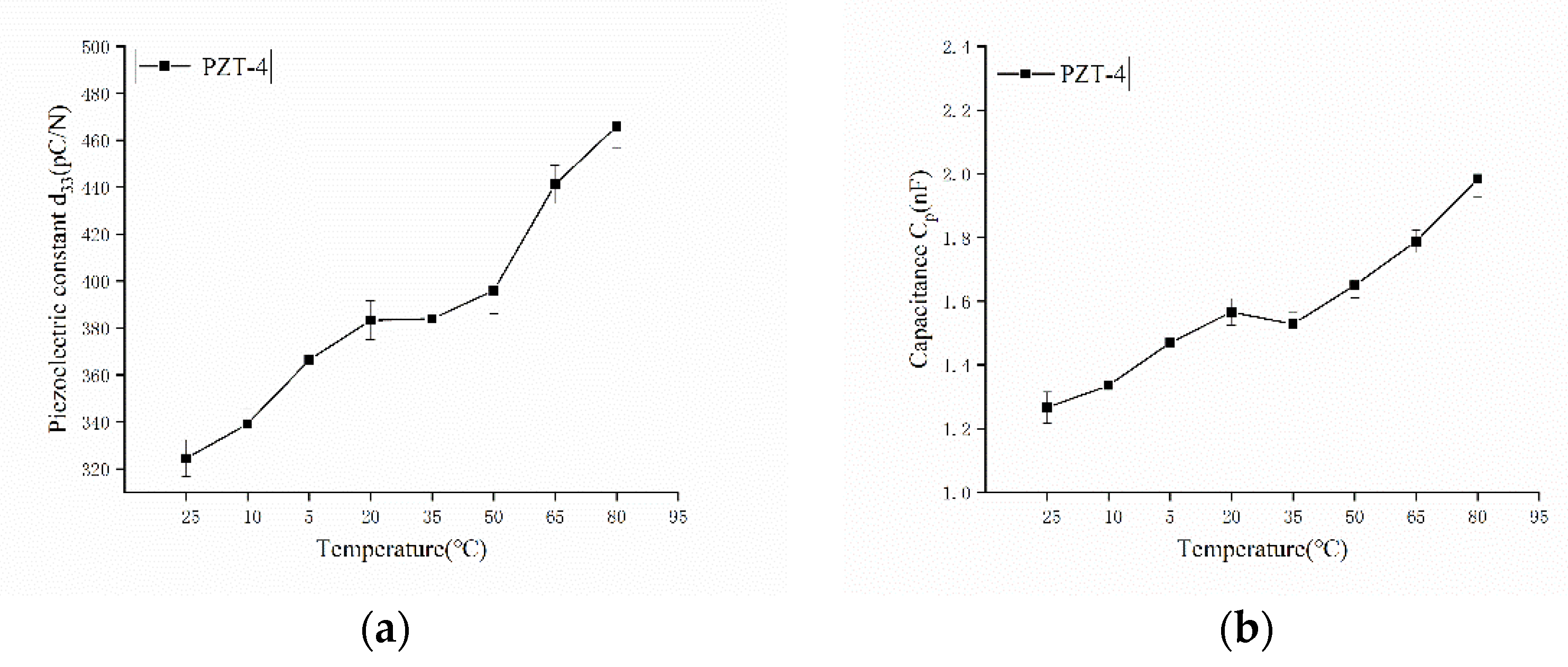
3.1. Temperature Characteristics of Piezoelectric Ceramics
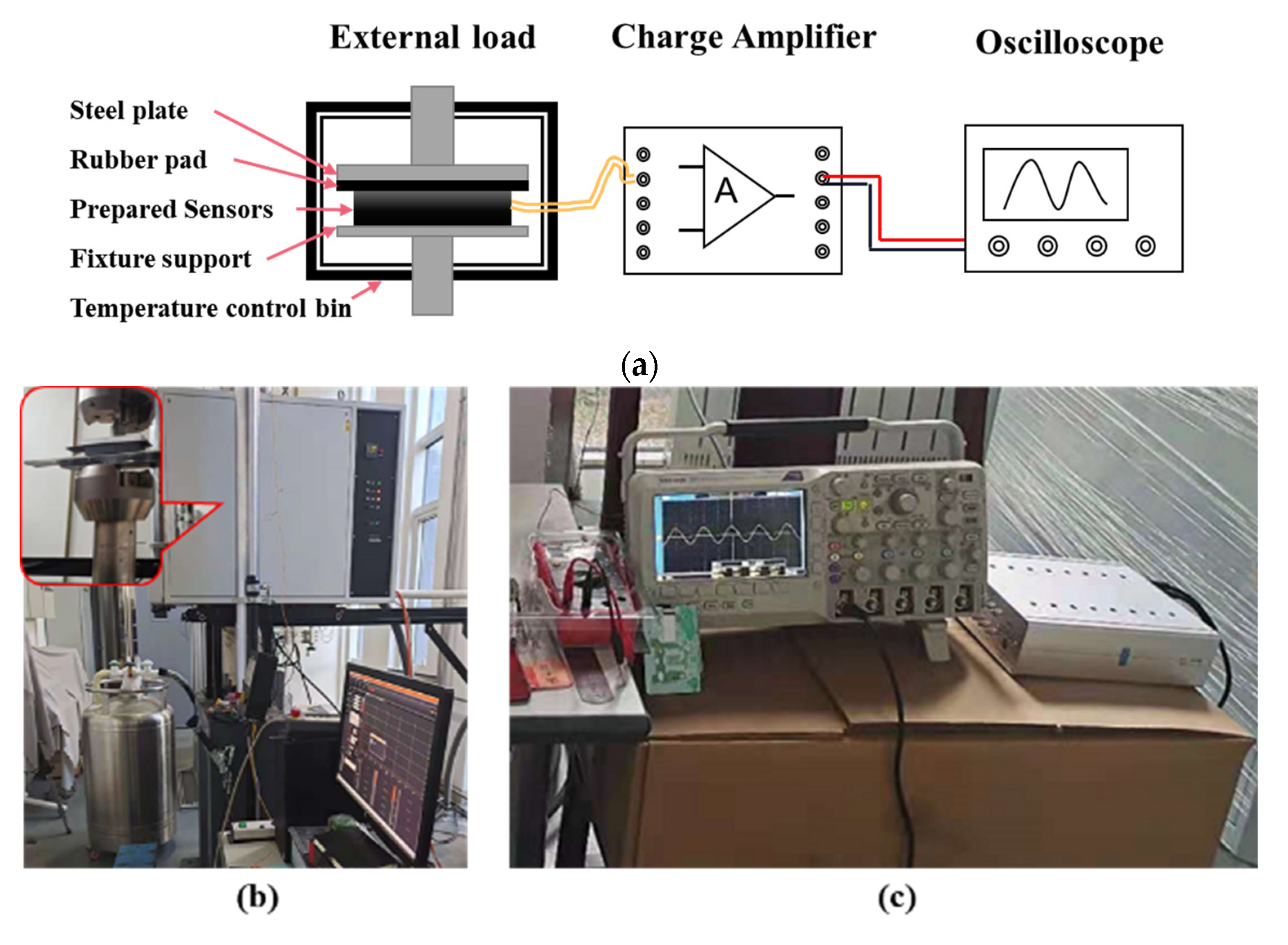
3.2. Test Design of Temperature Compensation
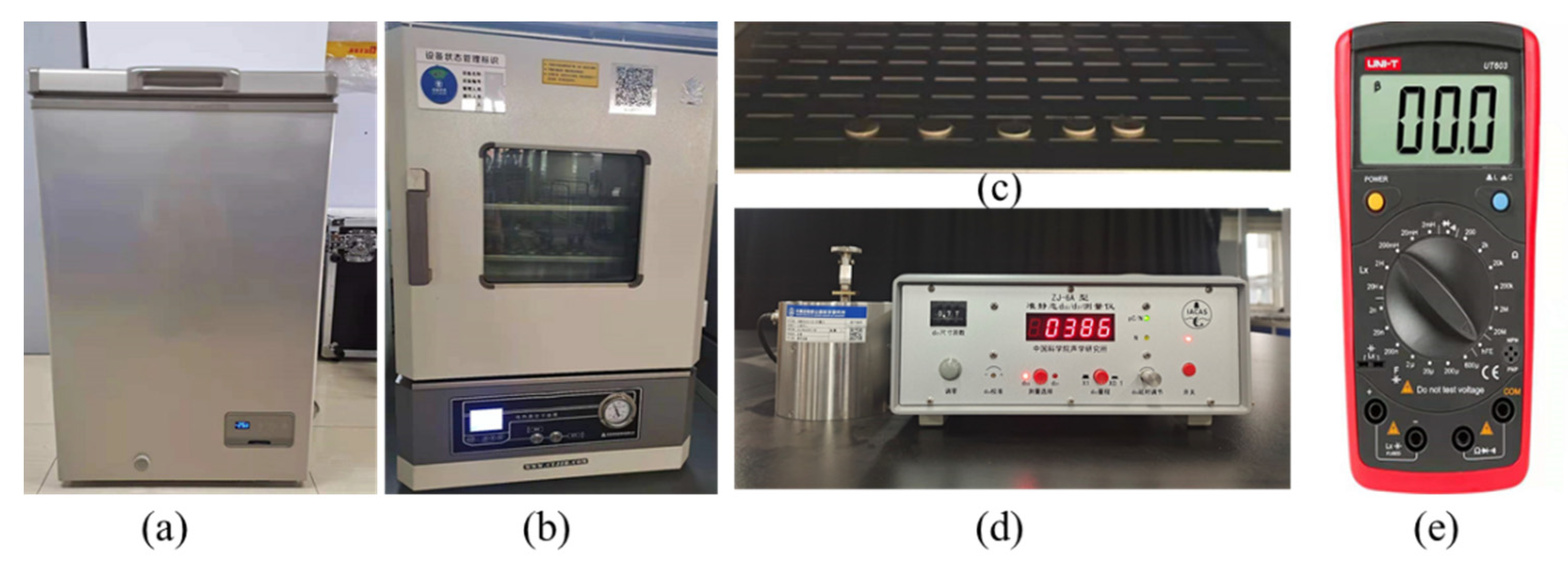
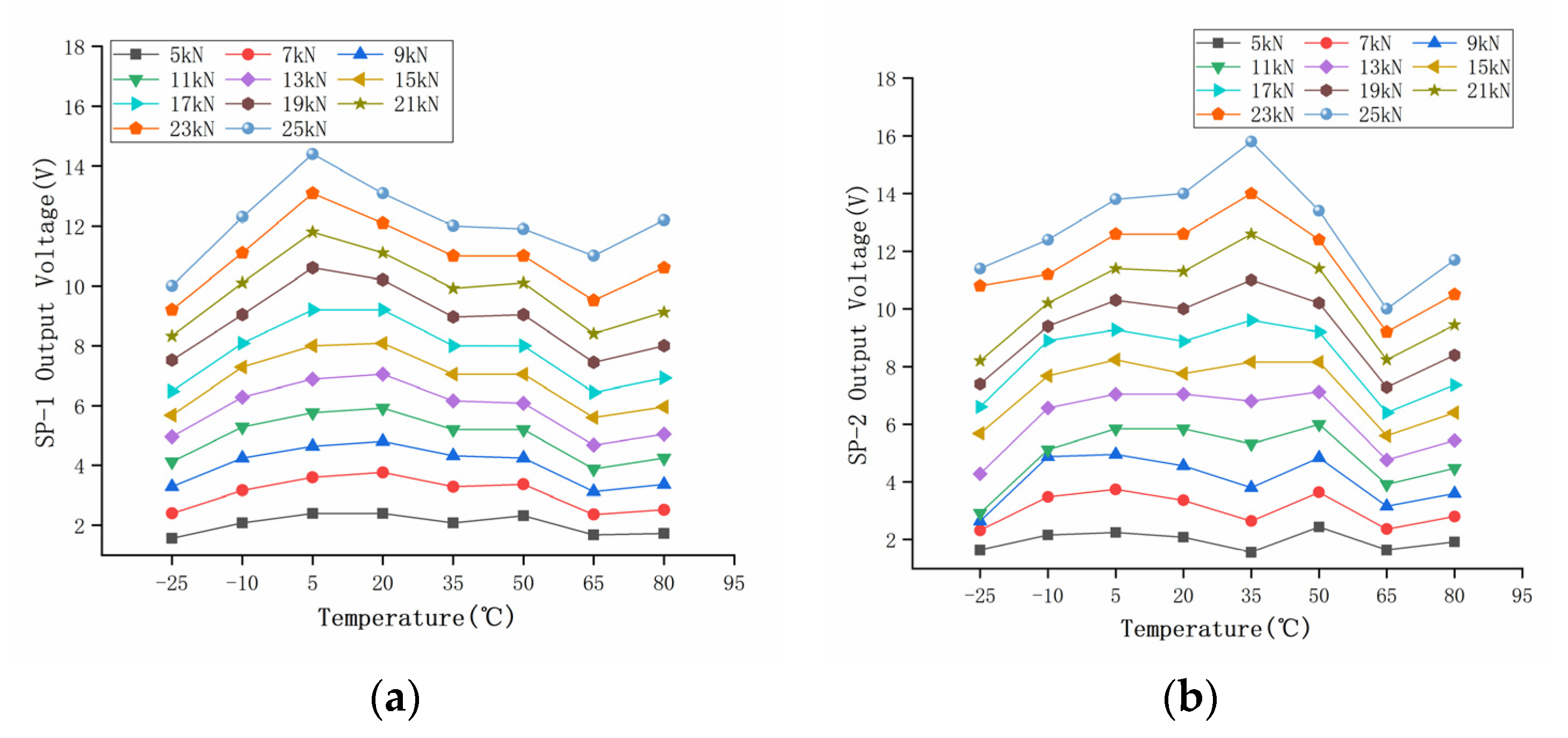
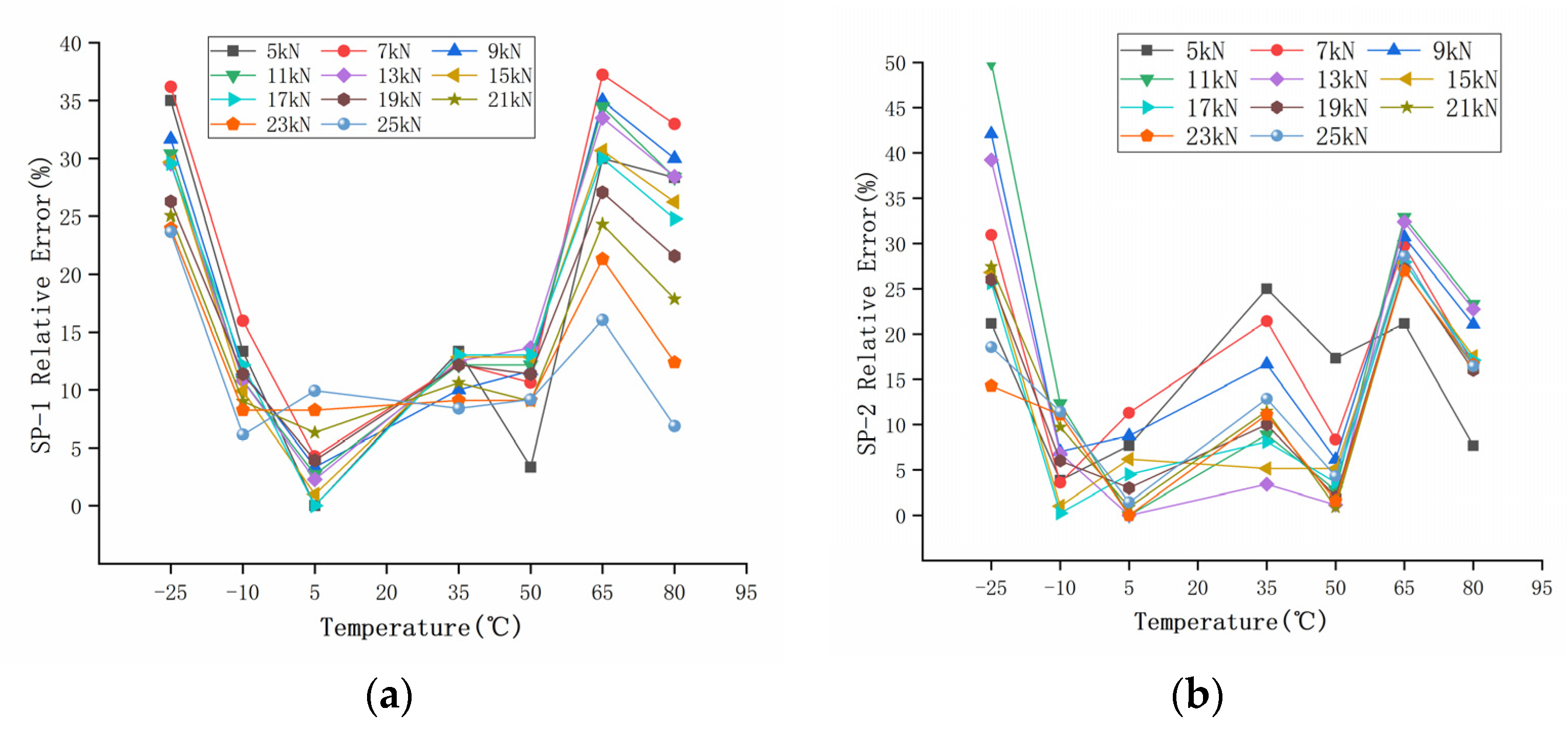
3.3. Data Acquisition
- is the is the absolute error;
- is the true value.
4. Temperature Compensation Data Processing
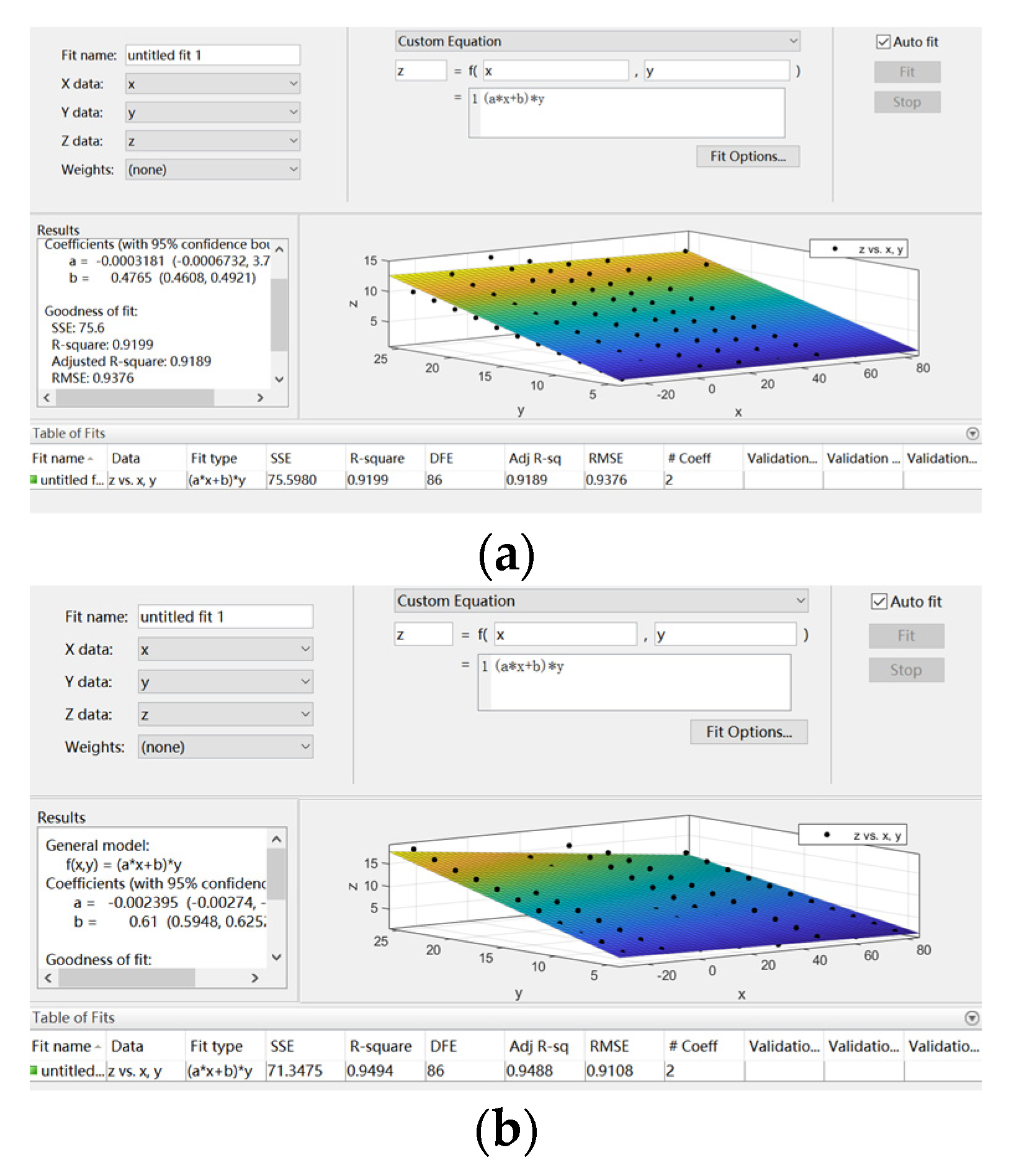
4.1. Mathematical Model of Temperature Characteristics of PZT Sensor
- is the sensitivity coefficient of the sensors, in V/N;
- is the force applied on the sensor, in N.
- is the PZT sensor sensitivity temperature coefficient;
- is the temperature;
- is the sensitivity of PZT sensor at 0 °C.
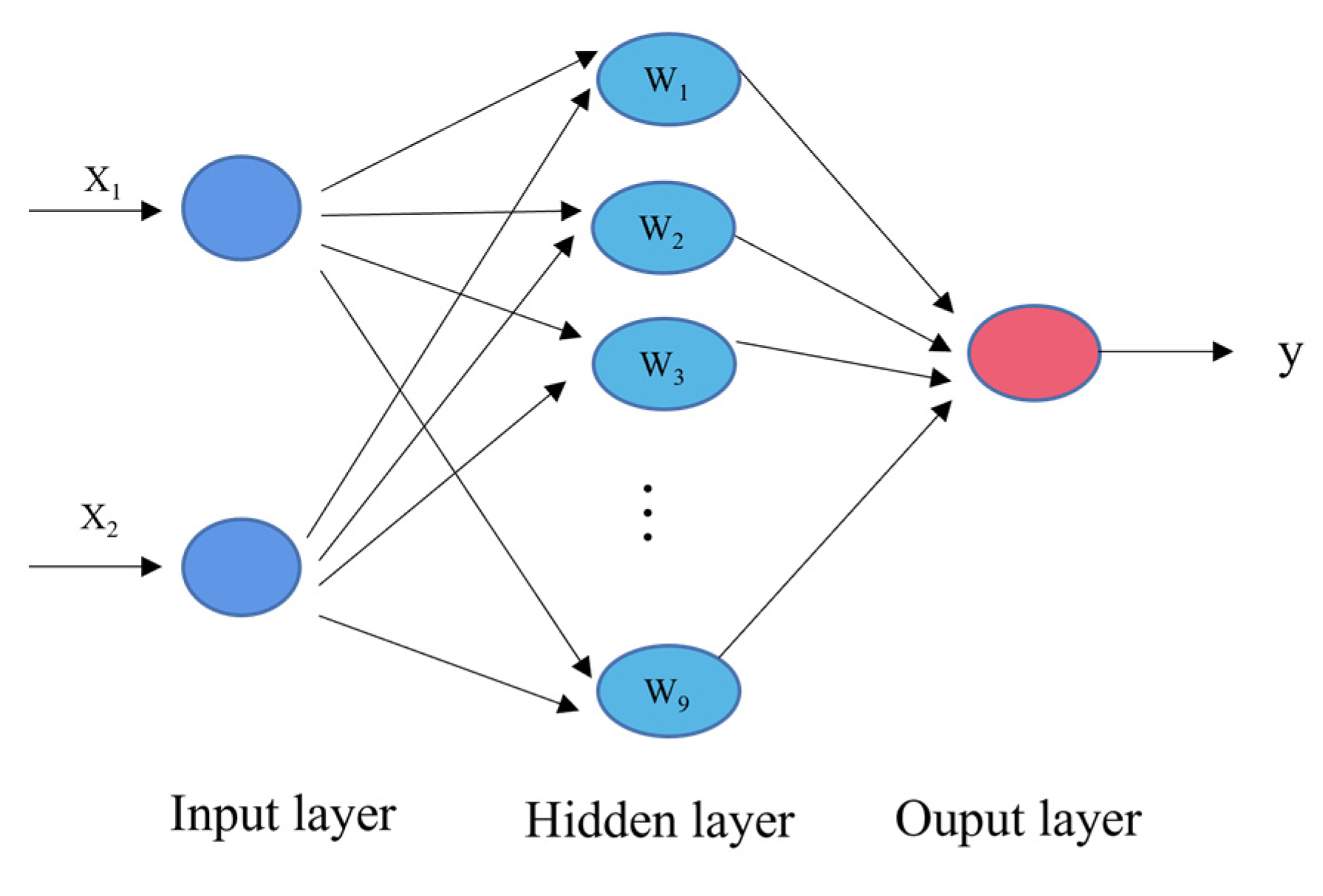
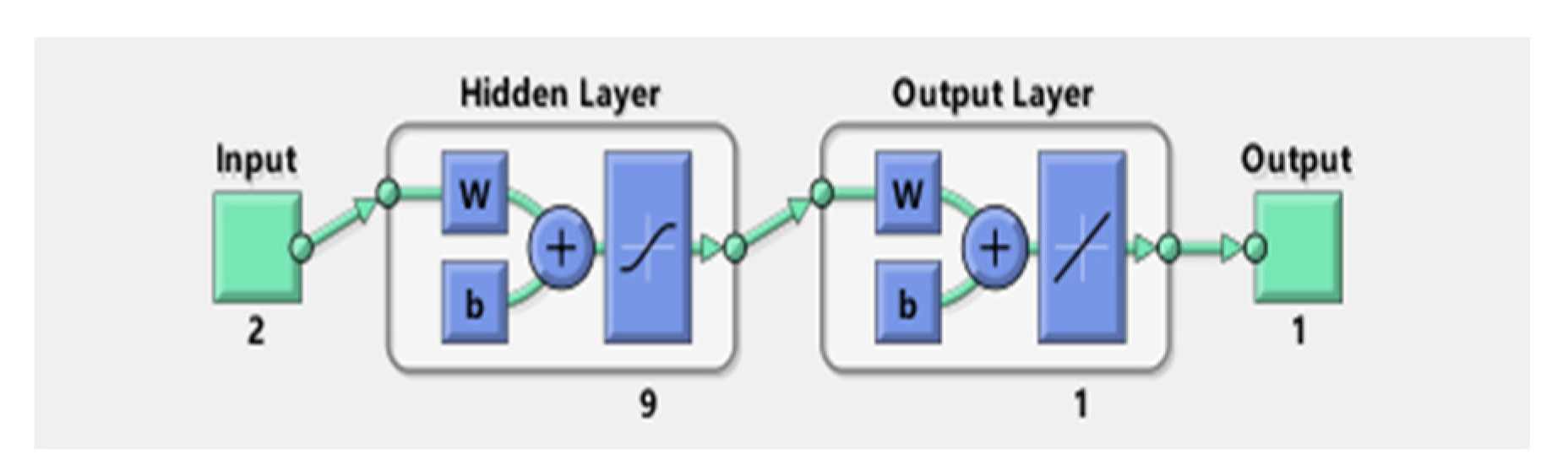
4.2. BP Neural Network of Temperature Compensation
- (1)
- Preparation of the dataset: In this paper, 88 groups of data, obtained from SP-1 in the above experiment, were used for model construction. All of the samples were randomly divided into two sets, of which 77 groups of data were used as the training set and 11 groups of data were used as the verification set. All the data were normalized to unify their values between [–1,1];
- (2)
- Number of implied layers: The number of hidden layer nodes and the number of iterations in the training process had a great impact on the accuracy and efficiency of network training. Empirical formulas were used to calculate the hidden layer nodes;
- is the input of the layer number;
- is the number of the output layer;
- is generally taken as an integer between 1 and 10.
- (3)
- Determination of the training parameters: The essence of the training process is to iteratively reduce the error between the predicted value and the target (actual) value. The learning rate may affect the training accuracy and training speed of the network. With the decrease in learning rate, the training accuracy is improved at the cost of increasing training time. However, too high a learning rate will lead to network instability and lead to failure to converge. The learning rate is usually set between 0.001 and 1. This time, the learning rate was set to 0.01. The target training error was set to 0.00001 and the number of iterations was set to 1000;
- (4)
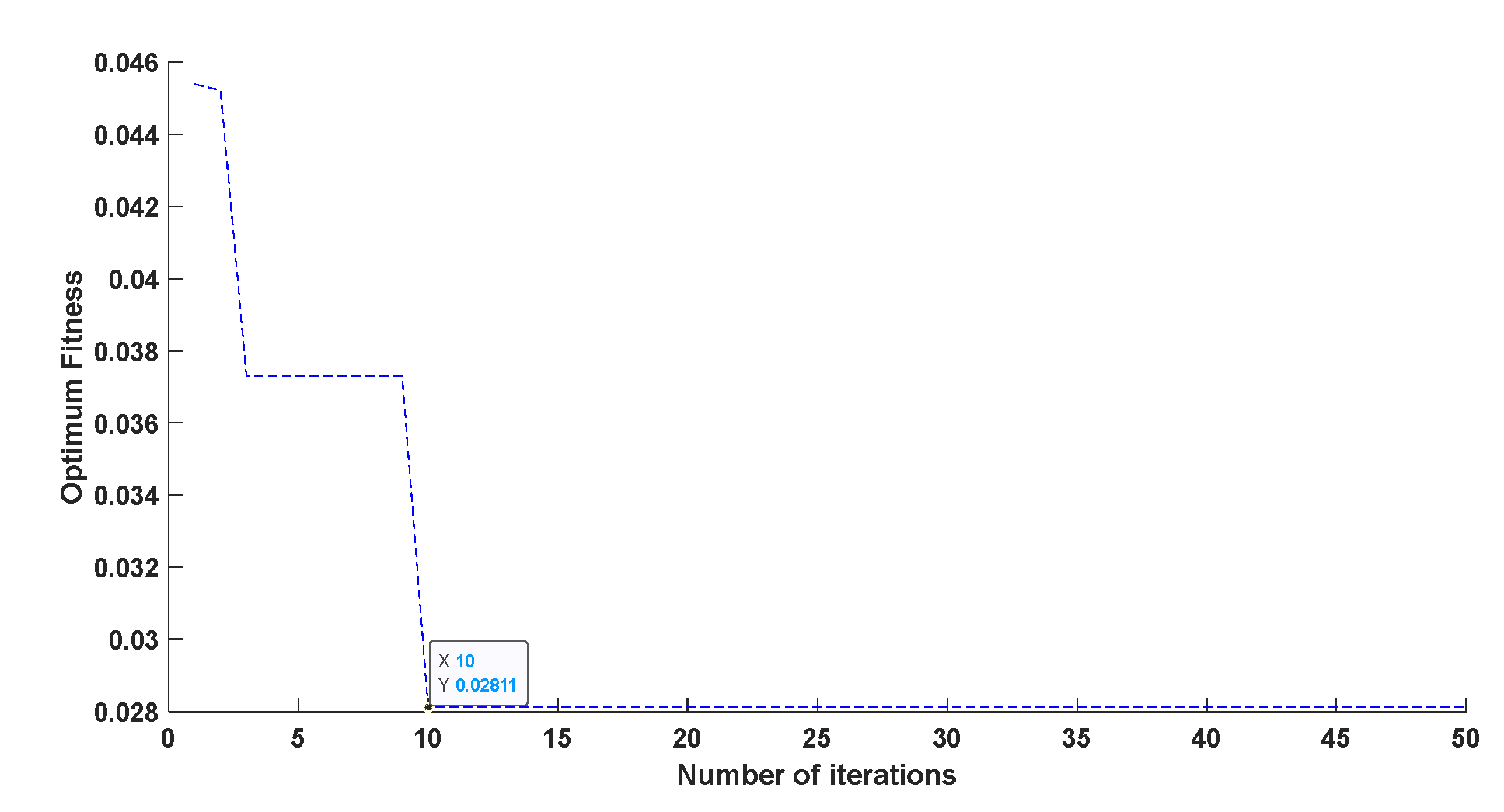
- Genetic algorithm solution: A population size of 30 was established by a genetic algorithm; the number of iterations was 50, the mutation probability was 0.2 and the crossover probability was 0.8.
5. Temperature Compensation Data Processing
5.1. Compensation Results of the Polynomial Regression Algorithm
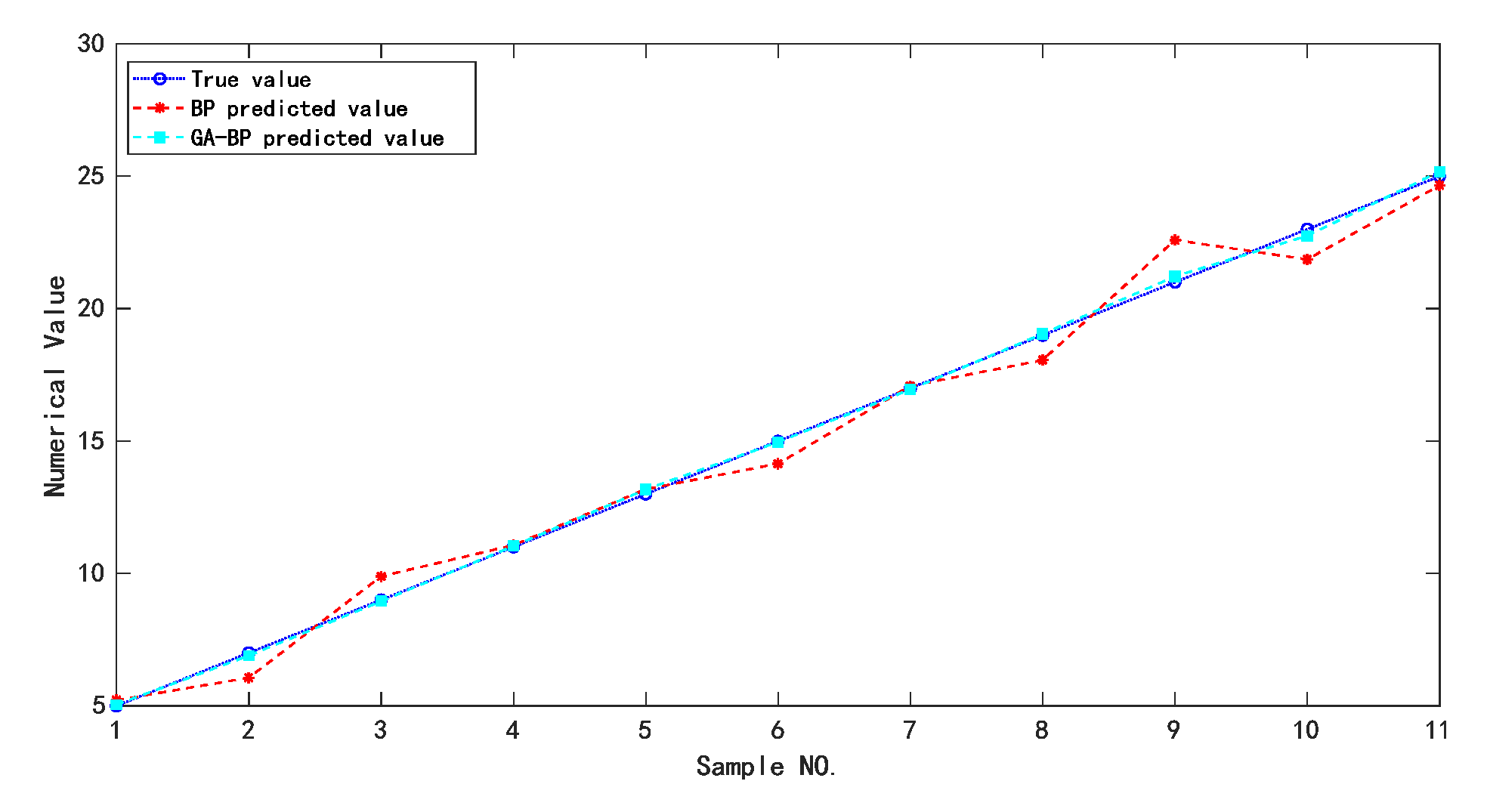
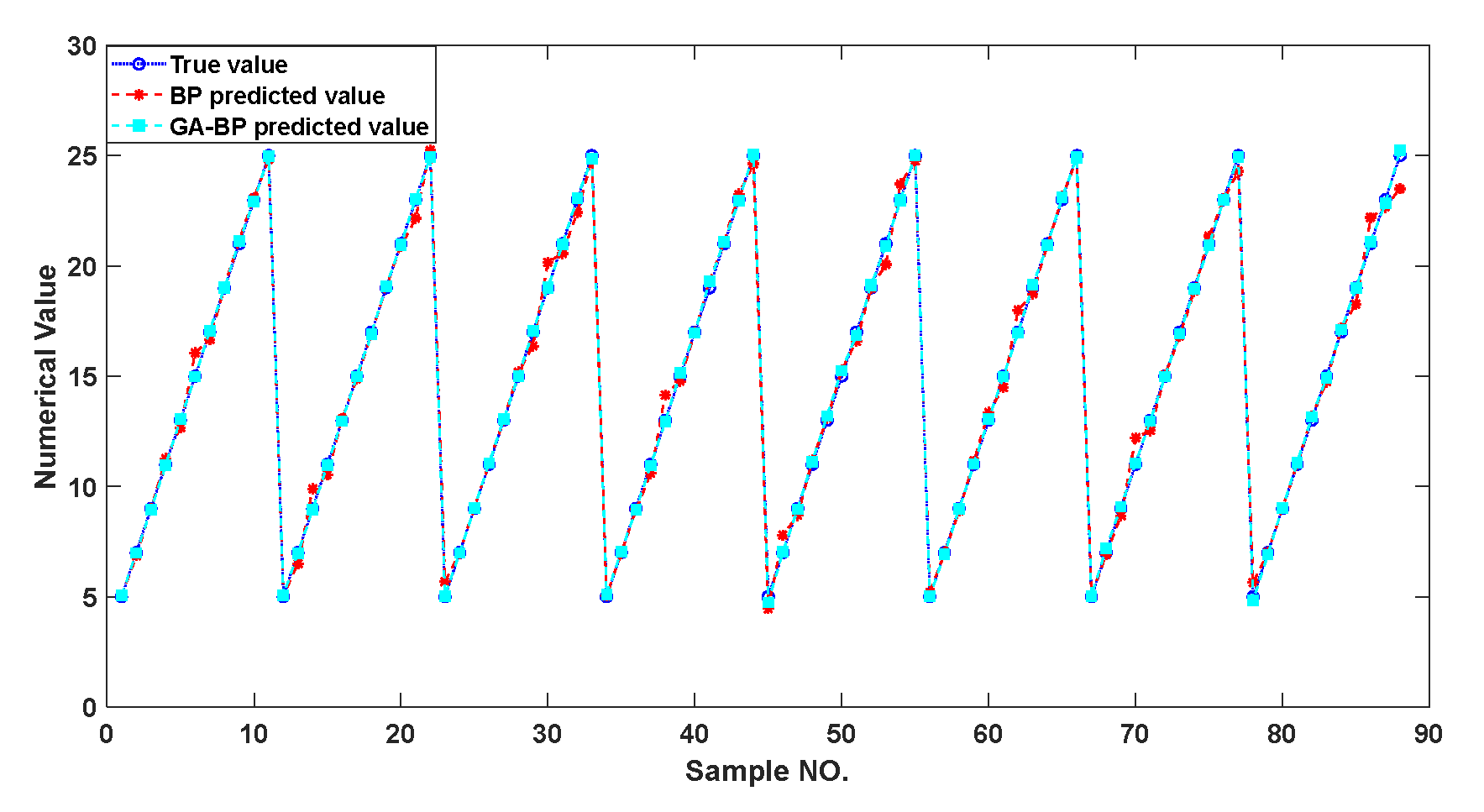
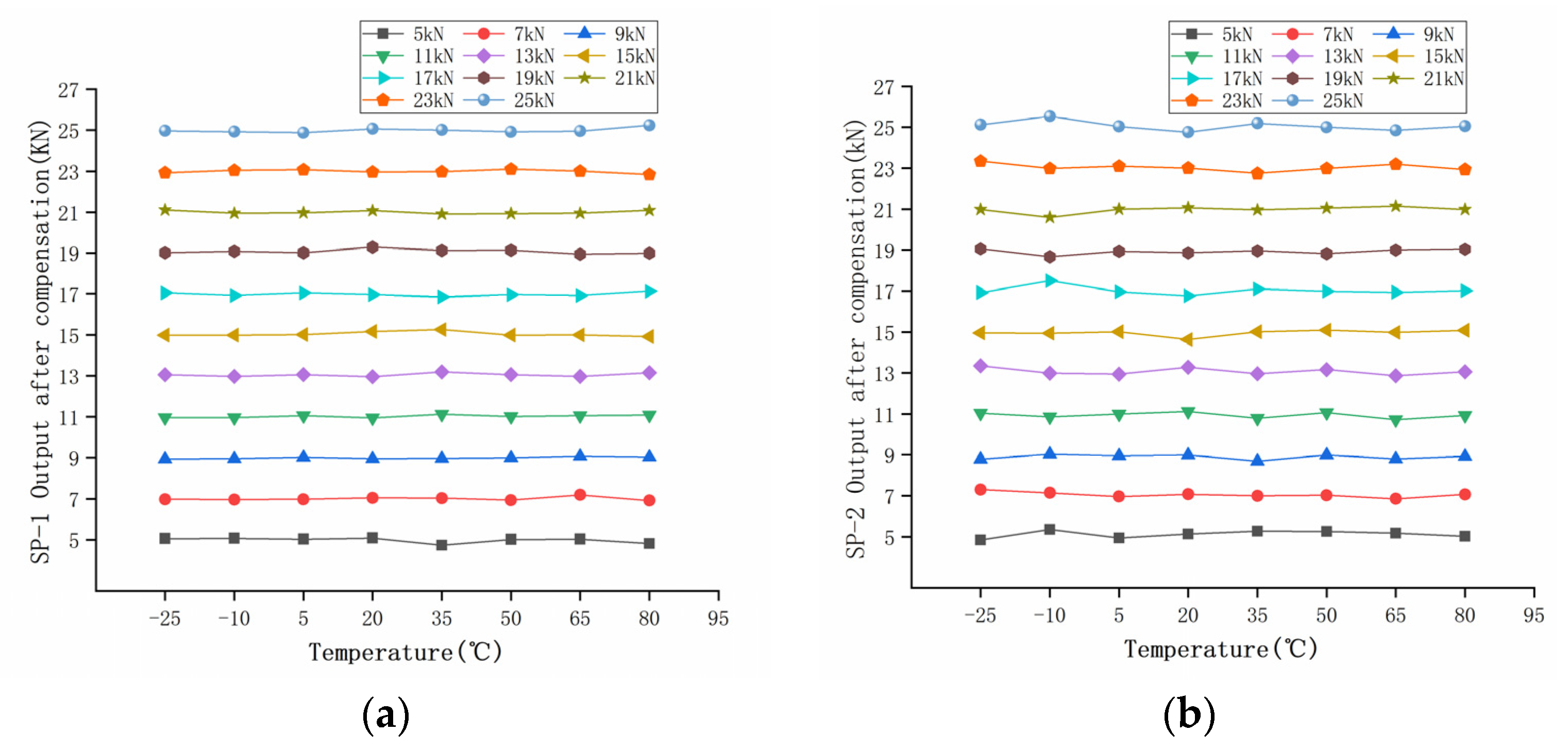
5.2. GA-BP Neural Network Compensation Results
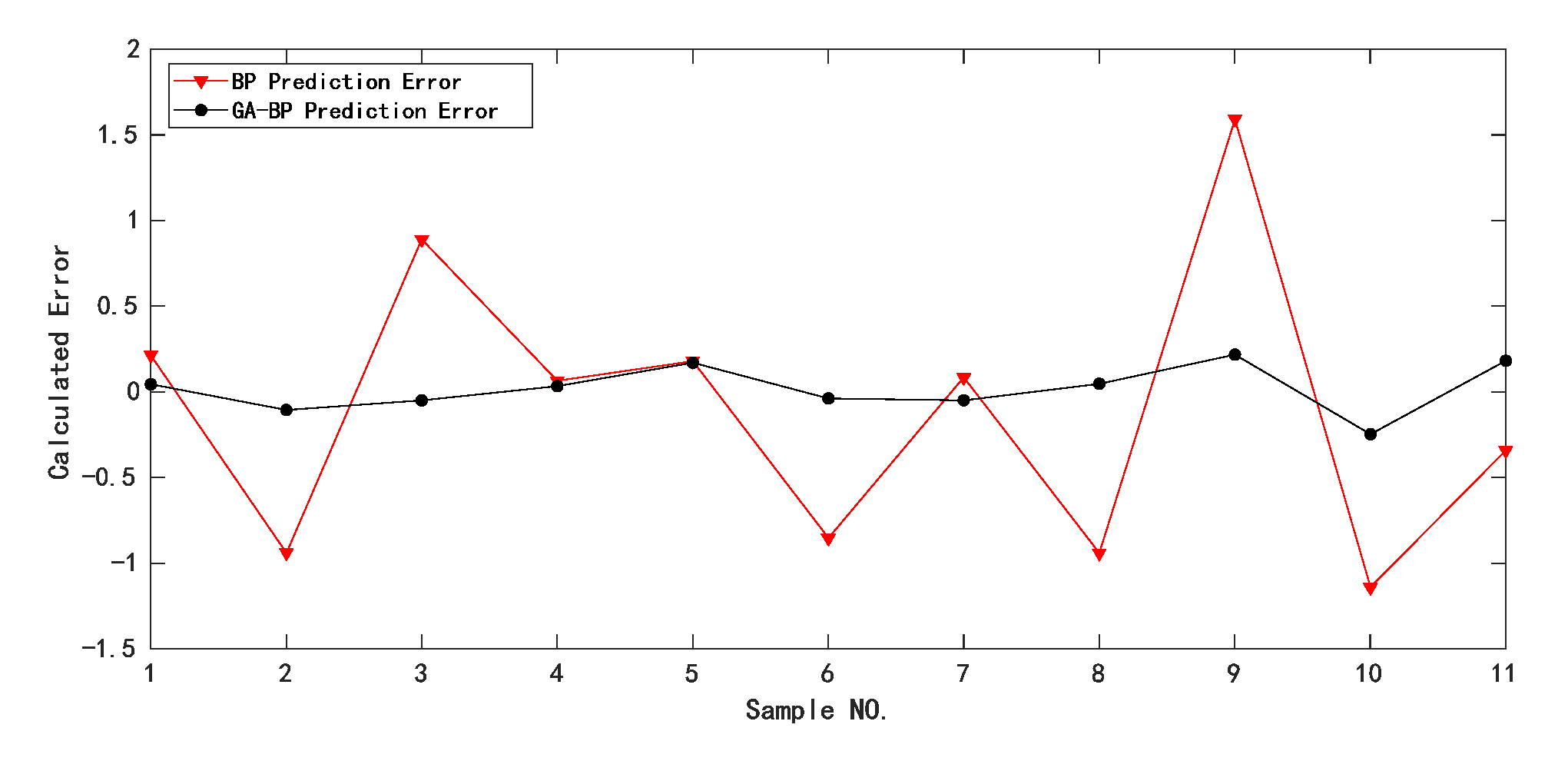
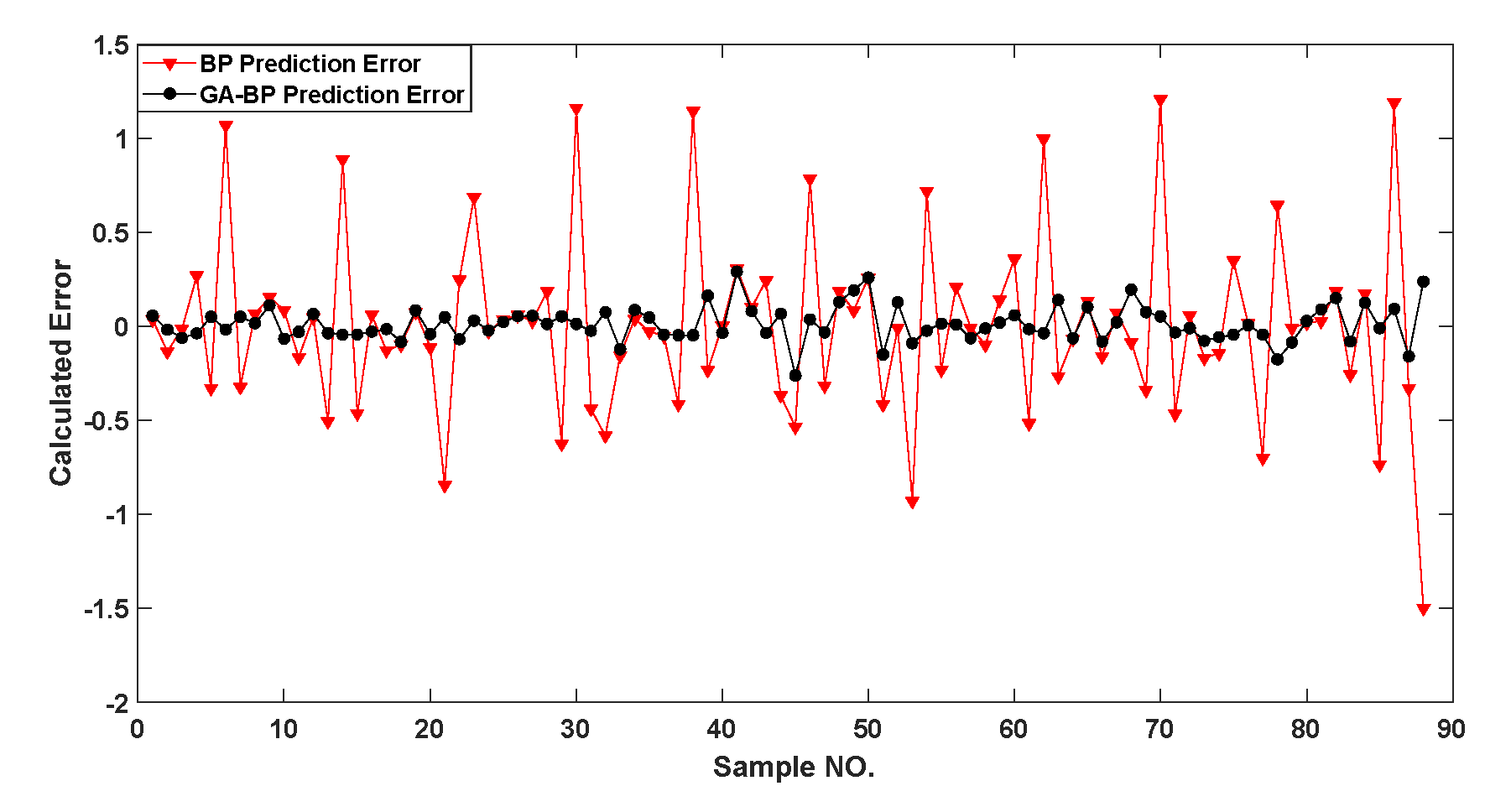
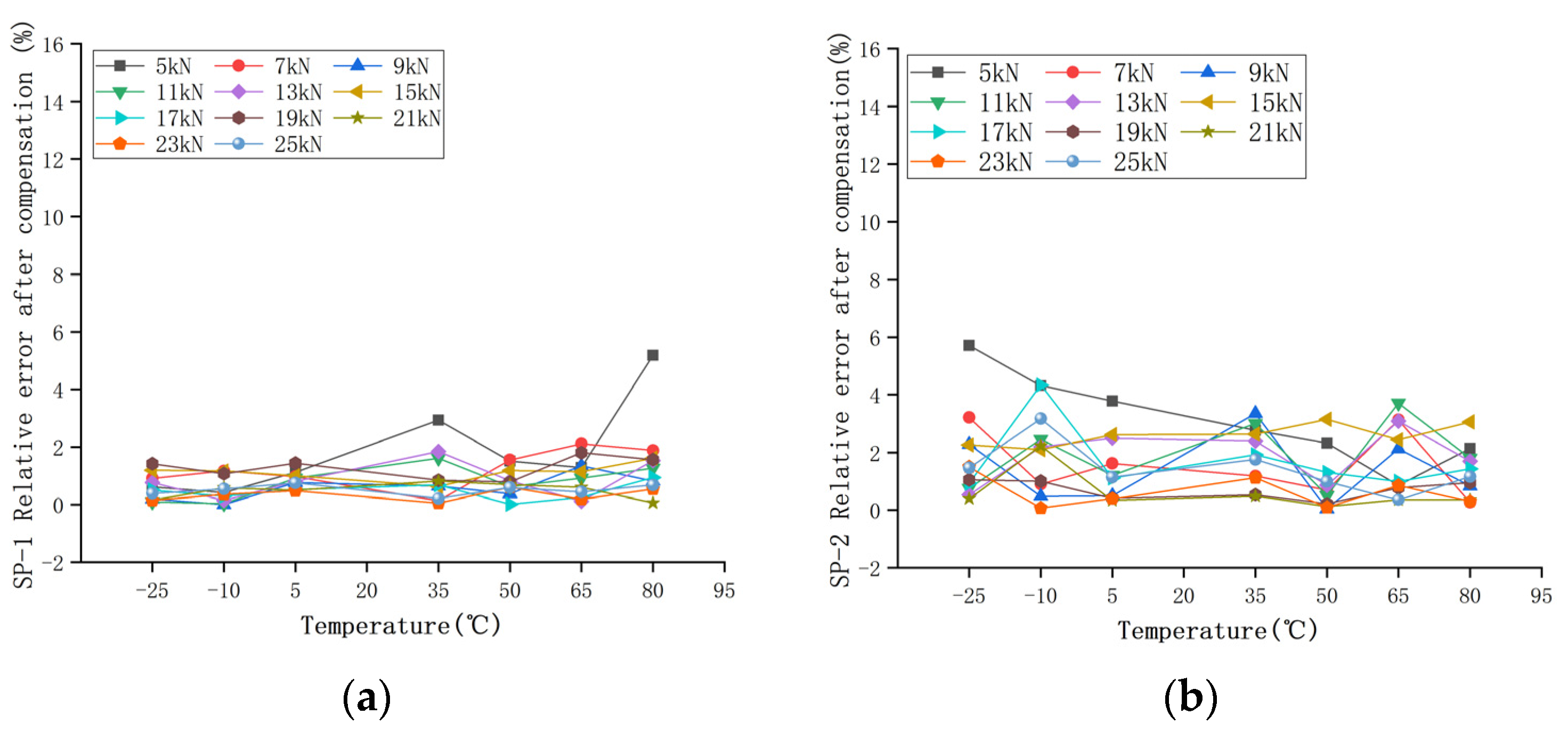
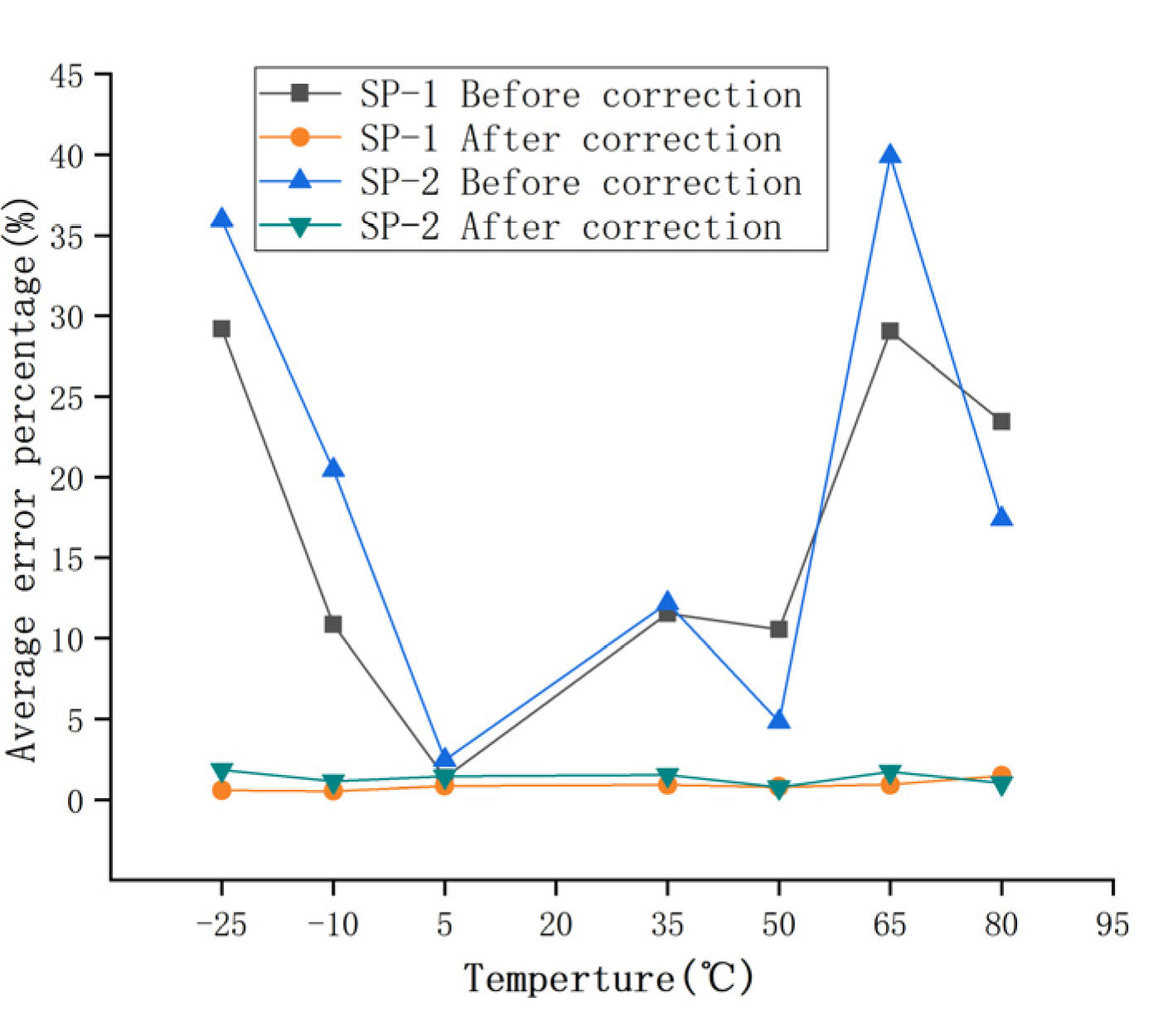
5.3. Comparison of Compensation Results and Error Analysis
- is the maximum values of different temperatures under the same calibration pressure;
- is the minimum value.
6. Conclusions
- (1)
- In this study, a piezoelectric sensor for a road Weigh-In-Motion (WIM) system was designed with piezoelectric ceramic as the core material. The sensor had the advantages of small volume, high reliability and easy construction;
- (2)
- In this paper, polynomial fitting and a GA-BP neural network were used to compensate for the output results. Compared with R2 and RMSE, the compensation effect of the GA-BP neural network was far better than that of polynomial linear fitting compensation, and the temperature compensation effect was obvious; this shows that the GA-BP temperature compensation model can better weaken the influence of temperature on sensor output;
- (3)
- In order to measure the performance index of the sensor after compensation, the temperature sensitivity drift of SP-1 was reduced from 1.0192 × 10−2 °C−1 to 1.896 × 10−4 °C−1, and the relative error at full scale was reduced from 30.5% to 1.42%, which was greatly improved. SP-2 also achieved the same effect. The measurement accuracy and sensitivity of piezoelectric ceramic sensor were improved.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vaziri, S.H.; Haas, C.T.; Rothenburg, L.; Haas, R.C. Investigation of the Effect of Weight Factor on Performance of Piezoelectric Weigh-in-Motion Sensors. J. Transp. Eng. 2013, 139, 913–922. [Google Scholar] [CrossRef]
- Sujon, M.; Dai, F. Application of weigh-in-motion technologies for pavement and bridge response monitoring: State-of-the-art review. Autom. Constr. 2021, 130, 103844. [Google Scholar] [CrossRef]
- Xu, W.; Feng, X.Y.; Xing, H.Y. Modeling and Analysis of Adaptive Temperature Compensation for Humidity Sensors. Electronics 2019, 8, 425. [Google Scholar] [CrossRef] [Green Version]
- Otto, G.G.; Simonin, J.M.; Piau, J.M.; Cottineau, L.M.; Chupin, O.; Momm, L.; Valente, A.M. Weigh-in-motion (WIM) sensor response model using pavement stress and deflection. Constr. Build. Mater. 2017, 156, 83–90. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.F.; Feng, Z.M.; Chen, Y.H.; Li, H.W. Multiple optimized support vector regression for multi-sensor data fusion of weigh-in-motion system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2807–2821. [Google Scholar] [CrossRef]
- Cao, Y.; Sha, A.; Liu, Z.; Li, J.; Jiang, W. Energy output of piezoelectric transducers and pavements under simulated traffic load. J. Clean. Prod. 2021, 279, 123508. [Google Scholar] [CrossRef]
- Znidaric, A.; Kalin, J.; Kreslin, M. Improved accuracy and robustness of bridge weigh-in-motion systems. Struct. Infrastruct. Eng. 2018, 14, 412–424. [Google Scholar] [CrossRef]
- Wang, L.; Yin, Y.; Zhou, W.; Wang, X.C. Study on Dynamic Weighing System of High Precision Array Piezoelectric Quartz. China J. Highw. Transp. 2016, 29, 137–143. [Google Scholar]
- Burnos, P.; Gajda, J.; Sroka, R.; Wasilewska, M.; Dolega, C. High Accuracy Weigh-In-Motion Systems for Direct Enforcement. Sensors 2021, 21, 8046. [Google Scholar] [CrossRef]
- Burnos, P.; Gajda, J. Optimised Autocalibration Algorithm of Weigh-In-Motion Systems for Direct Mass Enforcement. Sensors 2020, 20, 3049. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.H.; Kan, J.W.; Yu, X.C.; Wang, S.Y.; Ma, J.J.; Cao, Z.X. Sensitivity enhancement of piezoelectric force sensors by using multiple piezoelectric effects. Aip Adv. 2016, 6, 075320. [Google Scholar] [CrossRef] [Green Version]
- Jiao, P.C.; Egbe, K.J.I.; Xie, Y.W.; Nazar, A.M.; Alavi, A.H. Piezoelectric Sensing Techniques in Structural Health Monitoring: A State-of-the-Art Review. Sensors 2020, 20, 3730. [Google Scholar] [CrossRef] [PubMed]
- Xiong, H.C.; Zhang, Y.N. Feasibility Study for Using Piezoelectric-Based Weigh-In-Motion (WIM) System on Public Roadway. Appl. Sci. 2019, 9, 3098. [Google Scholar] [CrossRef] [Green Version]
- Hou, Y.; Li, Q.H.; Zhang, C.; Lu, G.Y.; Ye, Z.J.; Chen, Y.H.; Wang, L.B.; Cao, D.D. The State-of-the-Art Review on Applications of Intrusive Sensing, Image Processing Techniques, and Machine Learning Methods in Pavement Monitoring and Analysis. Engineering 2021, 7, 845–856. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, L.; Liao, Q.; Xie, S.; Kang, B.; Cao, H. Temperature characteristics testing and modifying of piezoelectric composites. Microelectron. Eng. 2021, 242, 111533. [Google Scholar] [CrossRef]
- Surbhi, S.; Sukesha, J.J. Response of piezoelectric materials to the external temperature, electric field and humidity. Mater. Today: Proc. 2020, 28, 1951–1954. [Google Scholar] [CrossRef]
- Ovechkina, E.; Dianov, S.; Glushkova, V. Improving the Measurement Accuracy of a Piezoelectric Pressure Sensor. In Proceedings of the 2019 Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 25–26 April 2019; pp. 455–457. [Google Scholar]
- Haider, S.W.; Harichandran, R.S.; Dwaikat, M.B. Impact of Systematic Axle Load Measurement Error on Pavement Design Using Mechanistic-Empirical Pavement Design Guide. J. Transp. Eng. Asce 2012, 138, 381–386. [Google Scholar] [CrossRef]
- Prozzi, J.A.; Hong, F. Effect of weigh-in-motion system measurement errors on load-pavement impact estimation. J. Transp. Eng. 2007, 133, 1–10. [Google Scholar] [CrossRef]
- Burnos, P.; Gajda, J. Thermal Property Analysis of Axle Load Sensors for Weighing Vehicles in Weigh-in-Motion System. Sensors 2016, 16, 2143. [Google Scholar] [CrossRef]
- Mo, S.; Wei, R.; Zeng, Z.; He, M. A multiple-sensitivity Hall sensor featuring a low-cost temperature compensation circuit. Microelectron. J. 2021, 113, 105067. [Google Scholar] [CrossRef]
- Zhang, R.; Duan, Y.; Zhao, Y.; He, X. Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors 2018, 18, 2176. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators A Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Liu, Y.S.; Miao, E.M.; Liu, H.; Chen, Y.Y. Robust machine tool thermal error compensation modelling based on temperature-sensitive interval segmentation modelling technology. Int. J. Adv. Manuf. Technol. 2020, 106, 655–669. [Google Scholar] [CrossRef]
- Gianesini, B.M.; Cortez, N.E.; Antunes, R.A.; Vieira, J. Method for removing temperature effect in impedance-based structural health monitoring systems using polynomial regression. Struct. Health Monit. Int. J. 2021, 20, 202–218. [Google Scholar] [CrossRef]
- Pieniazek, J.; Ciecinski, P. Temperature and Nonlinearity Compensation of Pressure Sensor With Common Sensors Response. Ieee Trans. Instrum. Meas. 2020, 69, 1284–1293. [Google Scholar] [CrossRef]
- Ma, C.; Zhao, L.; Mei, X.; Shi, H.; Yang, J. Thermal error compensation of high-speed spindle system based on a modified BP neural network. Int. J. Adv. Manuf. Technol. 2016, 89, 3071–3085. [Google Scholar] [CrossRef]
- Lu, X.H.; Wang, Y.Q.; Li, J.; Zhou, Y.; Ren, Z.J.; Liang, S.Y. Three-dimensional coordinate measurement algorithm by optimizing BP neural network based on GA. Eng. Comput. 2019, 36, 2066–2083. [Google Scholar] [CrossRef]
- Han, Z.; Hong, L.; Meng, J.; Li, Y.; Gao, Q. Temperature drift modeling and compensation of capacitive accelerometer based on AGA-BP neural network. Measurement 2020, 164, 108019. [Google Scholar] [CrossRef]
- Zheng, S.Q.; Liu, X.M.; Zhang, Y.M.; Han, B.C.; Shi, Y.Y.; Xie, J.J. Temperature Drift Compensation for Exponential Hysteresis Characteristics of High-Temperature Eddy Current Displacement Sensors. Ieee Sens. J. 2019, 19, 11041–11049. [Google Scholar] [CrossRef]
- Liu, P.F.; Zhang, W. A Fault Diagnosis Intelligent Algorithm Based on Improved BP Neural Network. Int. J. Pattern Recognit. Artif. Intell. 2019, 33, 1959028. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, F.L.; Sun, T.; Xu, B. A constrained optimization method based on BP neural network. Neural Comput. Appl. 2018, 29, 413–421. [Google Scholar] [CrossRef]
- Li, Y.Y.; Li, J.T.; Huang, J.; Zhou, H. Fitting analysis and research of measured data of SAW micro-pressure sensor based on BP neural network. Measurement 2020, 155, 107533. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Wang, L.B.; Zhao, K.; Yang, H.L. Development of a Novel Piezoelectric Sensing System for Pavement Dynamic Load Identification. Sensors 2019, 19, 4668. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, H.L.; Guo, M.; Wang, L.B.; Hou, Y.; Zhao, Q.; Cao, D.W.; Zhou, B.; Wang, D.W. Investigation on the factors influencing the performance of piezoelectric energy harvester. Road Mater. Pavement Des. 2017, 18, 180–189. [Google Scholar] [CrossRef]
- Song, S.L.; Hou, Y.; Guo, M.; Wang, L.B.; Tong, X.L.; Wu, J.F. An investigation on the aggregate-shape embedded piezoelectric sensor for civil infrastructure health monitoring. Constr. Build. Mater. 2017, 131, 57–65. [Google Scholar] [CrossRef]
- Yang, H.L.; Wei, Y.; Zhang, W.D.; Ai, Y.B.; Ye, Z.J.; Wang, L.B. Development of Piezoelectric Energy Harvester System through Optimizing Multiple Structural Parameters. Sensors 2021, 21, 2876. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.B.; Chen, H.F.; Lu, Y.J. Research on sensor error compensation of comprehensive logging unit based on machine learning. J. Intell. Fuzzy Syst. 2019, 37, 3113–3123. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values | Units |
|---|---|---|---|
| Piezoelectric constant | 220 | pC/N | |
| Relative dielectric constant | 1050 | - | |
| Curie temperature | 310 | °C | |
| Density | 7.45 | 103 kg/m3 | |
| Elastic modulus | E | 83.3 | GPa |
| Electromechanical coupling coefficient | Qm | >0.63 | - |
| Parameters | Test Standard | Mechanical Property |
|---|---|---|
| Density | ISO1183 | 1.48 g/cm−3 |
| Tensile strength | ISO527 | 145 MPa |
| Elongation at break | ISO527 | 2% |
| Bending strength | ISO178 | 200 MPa |
| Elastic modulus | ISO604 | 5900 MPa |
| Poisson’s ratio | ISO527 | 0.34 |
| Parameters * | Component A | Component B |
|---|---|---|
| Density | 1.45–1.80 g/cm3 | 1.08–1.15 g/cm3 |
| Dynamic viscosity | 3000–4000 cps | 100–250 cps |
| Hardness (Shore-D) | ≥80 | |
| Insulation strength | ≥1015 Ω·cm | |
| Volume resistivity | ≥15 V/mm | |
| Shear strength | ≥10 MPa | |
| Dielectric constant | 3.0 ± 0.1 | |
| Operating temperature | −30–120 °C | |
| Curing shrinkage | ≤0.5% | |
| Parameters | Units | Value |
|---|---|---|
| Measuring charge ranges | pC | ±107 |
| Output voltage ranges | mV | ±10,000 |
| Gain factor | 0.1, 0.2, 0.5, 1, 2, 5, 10 | |
| Sensitivity * | pC/mV | 100 |
| Measurement uncertainty | % | 0.5 |
| Frequency range | Hz | 0.1–200,000 |
| Load (kN) | U(V) T = −25 °C | U(V) T = −10 °C | U(V) T = 5 °C | U(V) T = 20 °C | U(V) T = 35 °C | U(V) T = 50 °C | U(V) T = 65 °C | U(V) T = 80 °C |
|---|---|---|---|---|---|---|---|---|
| 5 | 1.56 | 2.08 | 2.40 | 2.40 | 2.08 | 2.32 | 1.68 | 1.72 |
| 7 | 2.40 | 3.16 | 3.60 | 3.76 | 3.28 | 3.36 | 2.36 | 2.52 |
| 9 | 3.28 | 4.24 | 4.64 | 4.80 | 4.32 | 4.24 | 3.12 | 3.36 |
| 11 | 4.12 | 5.28 | 5.76 | 5.92 | 5.20 | 5.20 | 3.88 | 4.24 |
| 13 | 4.96 | 6.28 | 6.88 | 7.04 | 6.16 | 6.08 | 4.68 | 5.04 |
| 15 | 5.68 | 7.28 | 8.00 | 8.08 | 7.04 | 7.04 | 5.60 | 5.96 |
| 17 | 6.48 | 8.08 | 9.20 | 9.20 | 8.00 | 8.00 | 6.44 | 6.92 |
| 19 | 7.52 | 9.04 | 10.6 | 10.20 | 8.96 | 9.04 | 7.44 | 8.00 |
| 21 | 8.32 | 10.10 | 11.8 | 11.10 | 9.92 | 10.10 | 8.40 | 9.12 |
| 23 | 9.20 | 11.10 | 13.1 | 12.10 | 11.00 | 11.00 | 9.52 | 10.60 |
| 25 | 10.00 | 12.30 | 14.4 | 13.10 | 12.00 | 11.90 | 11.00 | 12.20 |
| Load (kN) | U(V) T = −25 °C | U(V) T = −10 °C | U(V) T = 5 °C | U(V) T = 20 °C | U(V) T = 35 °C | U(V) T = 50 °C | U(V) T = 65 °C | U(V) T = 80 °C |
|---|---|---|---|---|---|---|---|---|
| 5 | 1.64 | 2.16 | 2.24 | 2.08 | 1.56 | 2.44 | 1.64 | 1.92 |
| 7 | 2.32 | 3.48 | 3.74 | 3.36 | 2.64 | 3.64 | 2.36 | 2.80 |
| 9 | 2.64 | 4.88 | 4.96 | 4.56 | 3.80 | 4.84 | 3.16 | 3.60 |
| 11 | 2.92 | 5.12 | 5.84 | 5.84 | 5.32 | 6.00 | 3.92 | 4.48 |
| 13 | 4.28 | 6.56 | 7.04 | 7.04 | 6.80 | 7.12 | 4.76 | 5.44 |
| 15 | 5.68 | 7.68 | 8.24 | 7.76 | 8.16 | 8.16 | 5.60 | 6.40 |
| 17 | 6.60 | 8.90 | 9.28 | 8.88 | 9.60 | 9.20 | 6.40 | 7.36 |
| 19 | 7.40 | 9.40 | 10.30 | 10.00 | 11.00 | 10.20 | 7.28 | 8.40 |
| 21 | 8.20 | 10.20 | 11.40 | 11.30 | 12.60 | 11.40 | 8.24 | 9.44 |
| 23 | 10.80 | 11.20 | 12.60 | 12.60 | 14.00 | 12.40 | 9.20 | 10.50 |
| 25 | 11.40 | 12.40 | 13.80 | 14.00 | 15.8 | 13.40 | 10.00 | 11.70 |
| Number | Parameter Values | Fitting Equation | R2 | RMSE |
|---|---|---|---|---|
| SP-1 | a = −3.18 × 10−4 b = 0.4765 | U = (−3.18 × 10− 4T + 0.4765) × F | 0.9199 | 0.9376 |
| SP-2 | a = −2.93 × 10−3 b = 0.61 | U = (−2.93 × 10−3T + 0.61) × F | 0.9494 | 0.9108 |
| Number | Measured Value | BP Predicted Value | GA-BP Value | BP Error | GA-BP Error |
|---|---|---|---|---|---|
| 1 | 5.0000 | 5.2144 | 5.0446 | 0.2144 | 0.0446 |
| 2 | 7.0000 | 6.0610 | 6.8939 | −0.9390 | −0.1061 |
| 3 | 9.0000 | 9.8911 | 8.9507 | 0.8911 | −0.0493 |
| 4 | 11.0000 | 11.0654 | 11.0332 | 0.0654 | 0.0332 |
| 5 | 13.0000 | 13.1809 | 13.1708 | 0.1809 | 0.1708 |
| 6 | 15.0000 | 14.1470 | 14.9619 | −0.8530 | −0.0381 |
| 7 | 17.0000 | 17.0847 | 16.9517 | 0.0847 | −0.0483 |
| 8 | 19.0000 | 18.0599 | 19.0481 | −0.9401 | 0.0481 |
| 9 | 21.0000 | 22.5921 | 21.2169 | 1.5921 | 0.2169 |
| 10 | 23.0000 | 21.8608 | 22.7545 | −1.1392 | −0.2455 |
| 11 | 25.0000 | 24.6584 | 25.1824 | −0.3416 | 0.1824 |
| Number | Polynomial Linear Fitting Compensation | GA-BP Neural Network Compensation | ||
|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | |
| SP-1 | 0.9199 | 0.9376 | 0.9993 | 0.0936 |
| SP-2 | 0.9494 | 0.9108 | 0.9988 | 0.2251 |
| Input Load (kN) | F’ (kN) T = −25 °C | F’ (kN) T = −10 °C | F’ (kN) T = 5 °C | F’ (kN) T = 20 °C | F’ (kN) T = 35 °C | F’ (kN) T = 50 °C | F’ (kN) T = 65 °C | F’ (kN) T = 80 °C |
|---|---|---|---|---|---|---|---|---|
| 5 | 5.06 | 5.07 | 5.03 | 5.09 | 4.94 | 5.01 | 5.02 | 4.82 |
| 7 | 6.98 | 6.96 | 6.98 | 7.05 | 7.04 | 6.94 | 7.19 | 6.91 |
| 9 | 8.94 | 8.96 | 9.02 | 8.96 | 8.97 | 8.99 | 9.08 | 9.03 |
| 11 | 10.96 | 10.96 | 11.05 | 10.95 | 11.13 | 11.02 | 11.05 | 11.09 |
| 13 | 13.05 | 12.97 | 13.06 | 12.95 | 13.19 | 13.06 | 12.97 | 13.15 |
| 15 | 14.98 | 14.99 | 15.01 | 15.16 | 15.26 | 14.98 | 14.99 | 14.92 |
| 17 | 17.05 | 16.92 | 17.05 | 16.97 | 16.85 | 16.96 | 16.92 | 17.12 |
| 19 | 19.02 | 19.08 | 19.01 | 19.29 | 19.13 | 19.14 | 18.94 | 18.99 |
| 21 | 21.11 | 20.96 | 20.98 | 21.08 | 20.91 | 20.94 | 20.95 | 21.09 |
| 23 | 22.93 | 23.05 | 23.07 | 22.96 | 22.98 | 23.10 | 23.01 | 22.84 |
| 25 | 24.97 | 24.93 | 24.88 | 25.07 | 25.01 | 24.92 | 24.96 | 25.24 |
| Input Load (kN) | F’ (kN) T = −25 °C | F’ (kN) T = −10 °C | F’ (kN) T = 5 °C | F’ (kN) T = 20 °C | F’ (kN) T = 35 °C | F’ (kN) T = 50 °C | F’ (kN) T = 65 °C | F’ (kN) T = 80 °C |
|---|---|---|---|---|---|---|---|---|
| 5 | 4.84 | 5.36 | 4.94 | 5.14 | 5.28 | 5.26 | 5.18 | 5.03 |
| 7 | 7.30 | 7.14 | 6.96 | 7.07 | 6.99 | 7.02 | 6.85 | 7.06 |
| 9 | 8.79 | 9.04 | 8.95 | 8.99 | 8.69 | 8.99 | 8.80 | 8.92 |
| 11 | 11.05 | 10.86 | 11.00 | 11.13 | 10.80 | 11.07 | 10.72 | 10.93 |
| 13 | 13.35 | 12.98 | 12.94 | 13.27 | 12.96 | 13.16 | 12.86 | 13.05 |
| 15 | 14.96 | 14.94 | 15.01 | 14.63 | 15.01 | 15.09 | 14.98 | 15.08 |
| 17 | 16.93 | 17.50 | 16.96 | 16.77 | 17.10 | 16.99 | 16.94 | 17.02 |
| 19 | 19.06 | 18.67 | 18.94 | 18.86 | 18.96 | 18.82 | 19.00 | 19.04 |
| 21 | 20.99 | 20.60 | 21.00 | 21.07 | 20.97 | 21.05 | 21.15 | 20.99 |
| 23 | 23.34 | 22.98 | 23.09 | 23.00 | 22.74 | 22.98 | 23.19 | 22.93 |
| 25 | 25.12 | 25.54 | 25.04 | 24.76 | 25.19 | 25.00 | 24.85 | 25.05 |
| SP-1 | Before compensation | °C−1 | |
| After compensation | °C−1 | ||
| SP-2 | Before compensation | °C−1 | |
| After compensation | °C−1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Yang, Y.; Hou, Y.; Liu, Y.; Liu, P.; Wang, L.; Ma, Y. Investigation of the Temperature Compensation of Piezoelectric Weigh-In-Motion Sensors Using a Machine Learning Approach. Sensors 2022, 22, 2396. https://doi.org/10.3390/s22062396
Yang H, Yang Y, Hou Y, Liu Y, Liu P, Wang L, Ma Y. Investigation of the Temperature Compensation of Piezoelectric Weigh-In-Motion Sensors Using a Machine Learning Approach. Sensors. 2022; 22(6):2396. https://doi.org/10.3390/s22062396
Chicago/Turabian StyleYang, Hailu, Yue Yang, Yue Hou, Yue Liu, Pengfei Liu, Linbing Wang, and Yuedong Ma. 2022. "Investigation of the Temperature Compensation of Piezoelectric Weigh-In-Motion Sensors Using a Machine Learning Approach" Sensors 22, no. 6: 2396. https://doi.org/10.3390/s22062396