
Phase Optimization for Multipoint Haptic Feedback Based on Ultrasound Array

Abstract
:1. Introduction
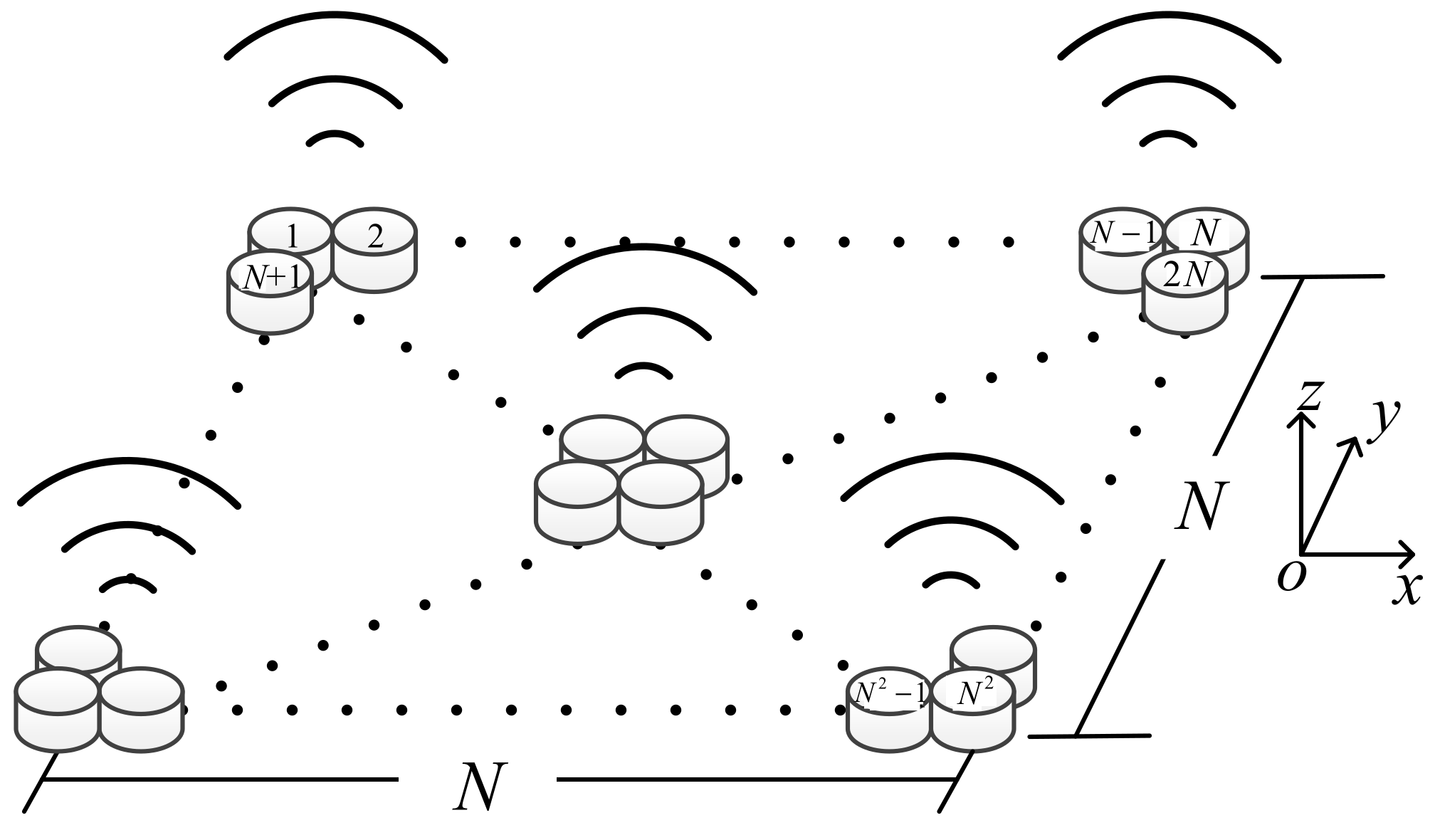
2. Acoustic Radiation Force Model
3. Optimization Model for Multipoint Focusing
3.1. Optimization Model Based Pseudo-Inverse (PINV)
3.2. Calculations of Multipoint Focusing
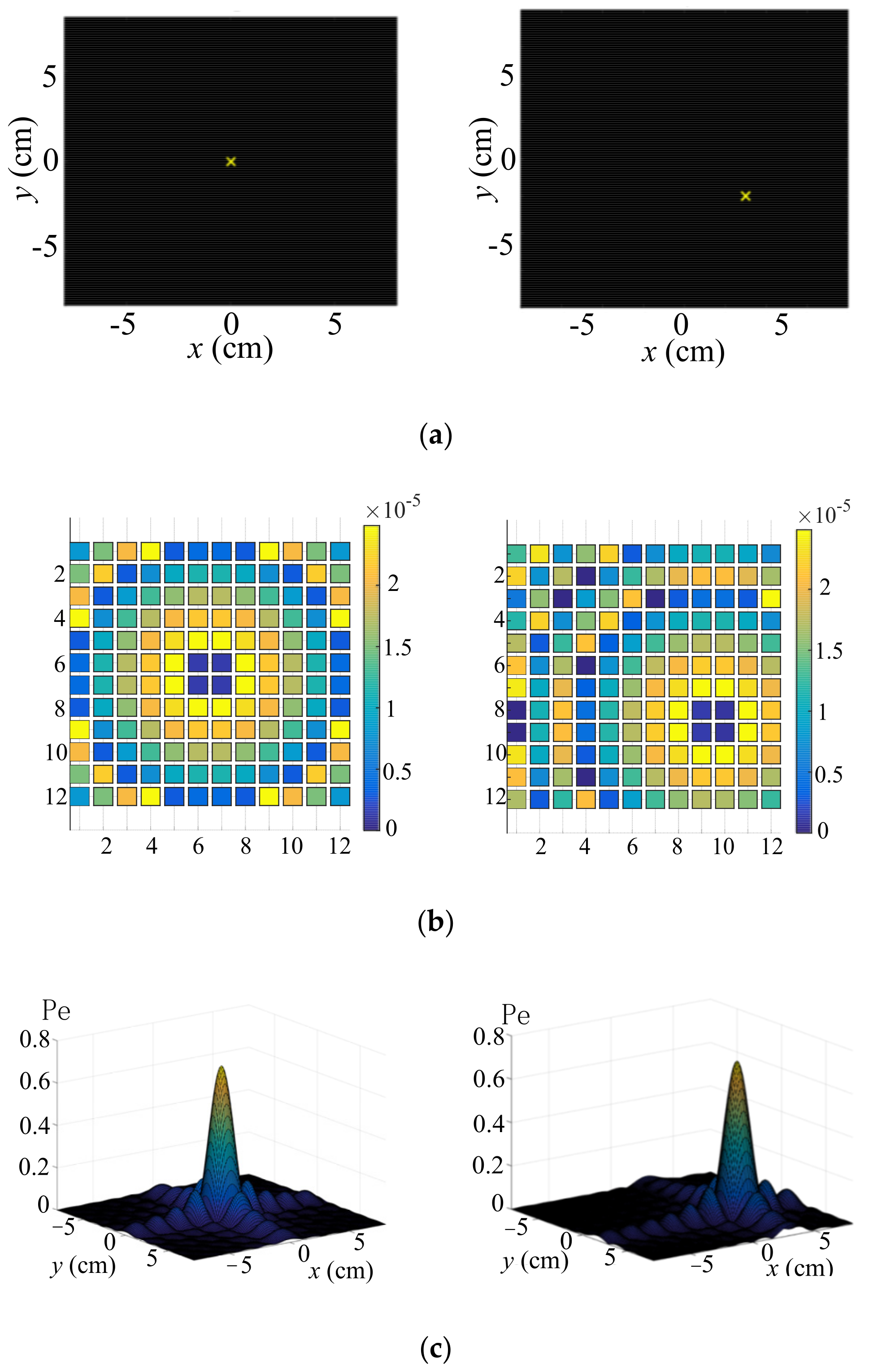
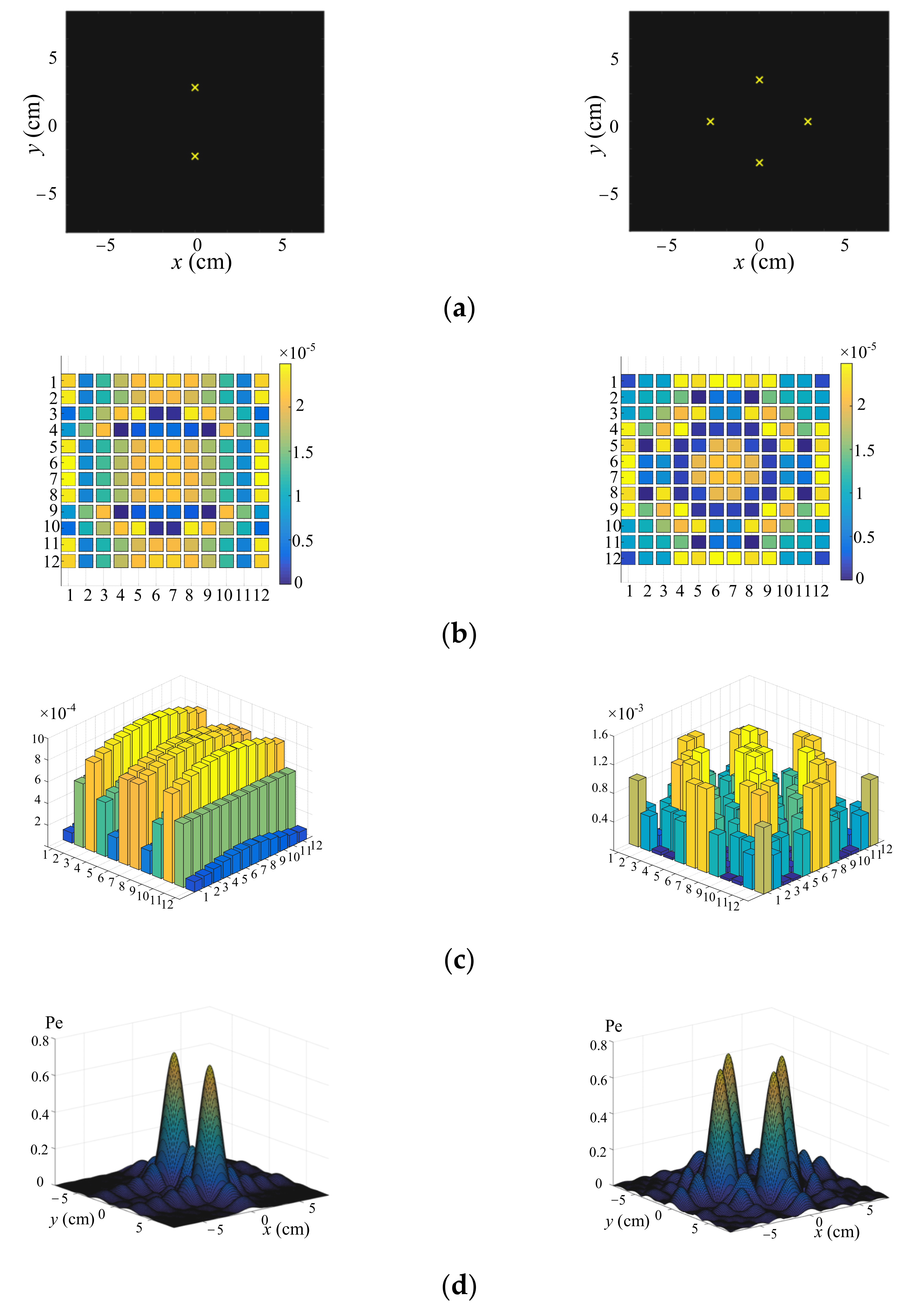
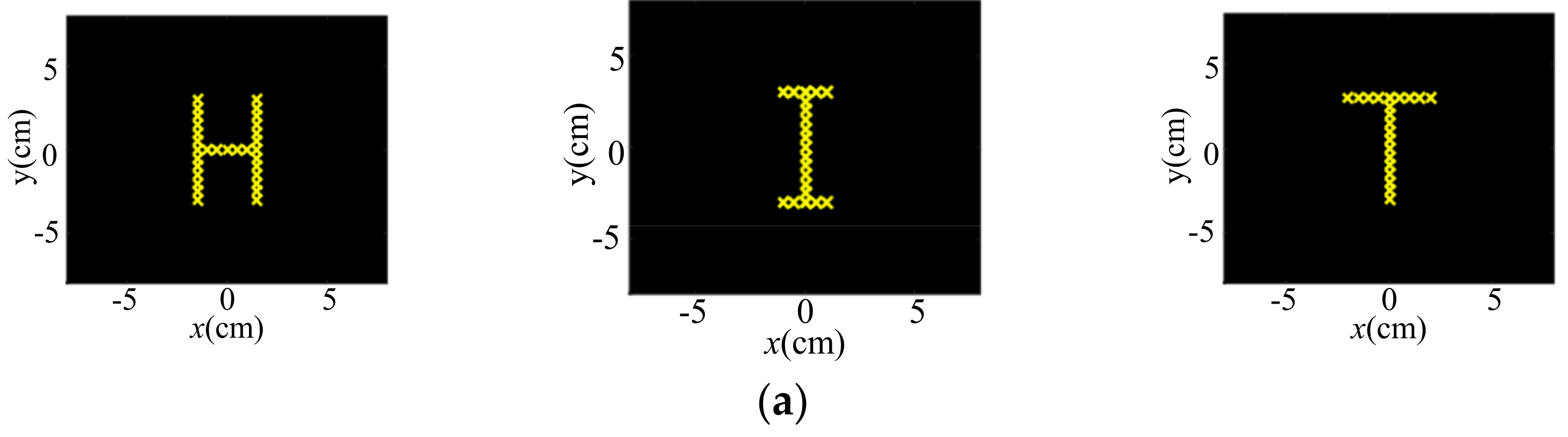
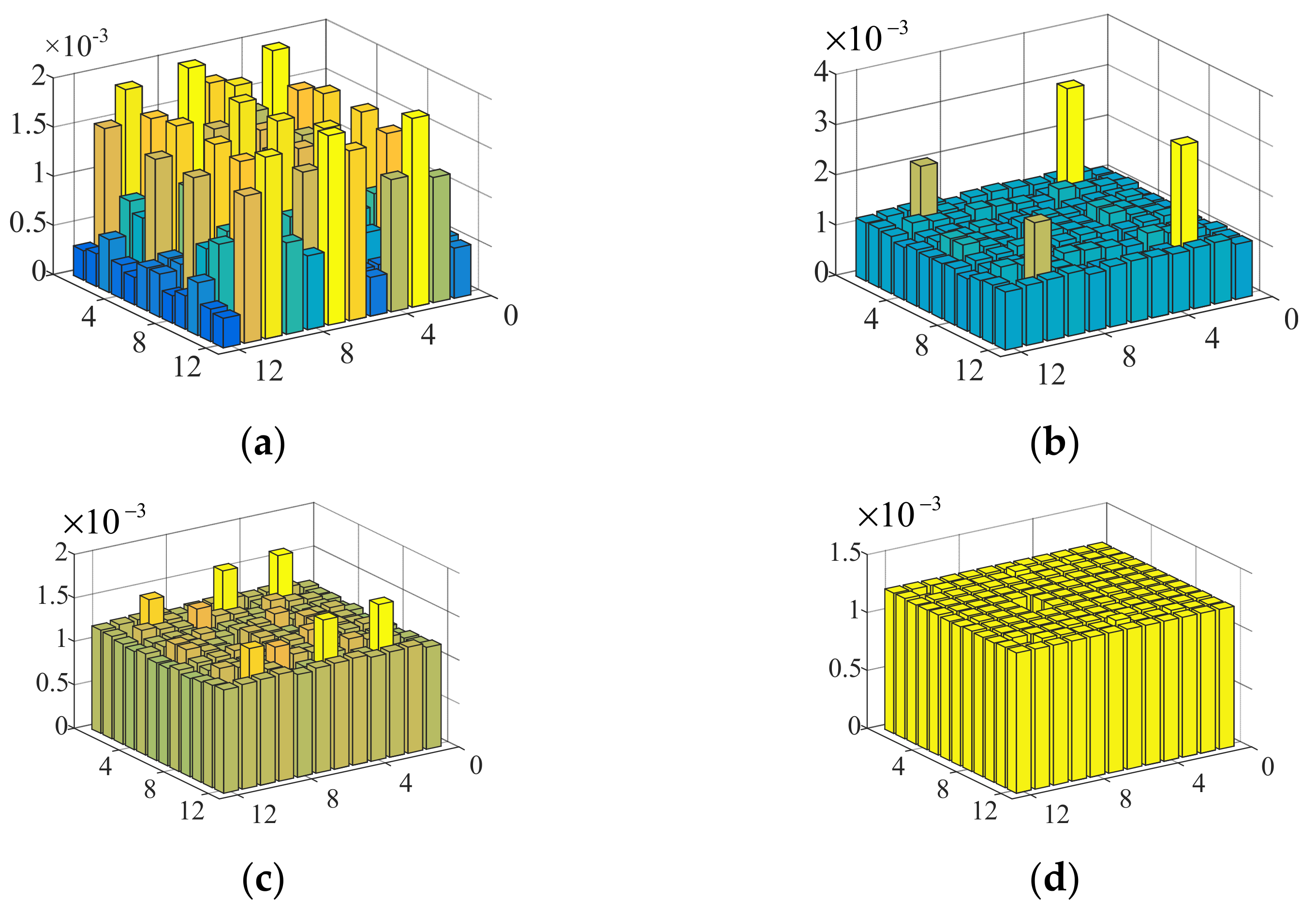
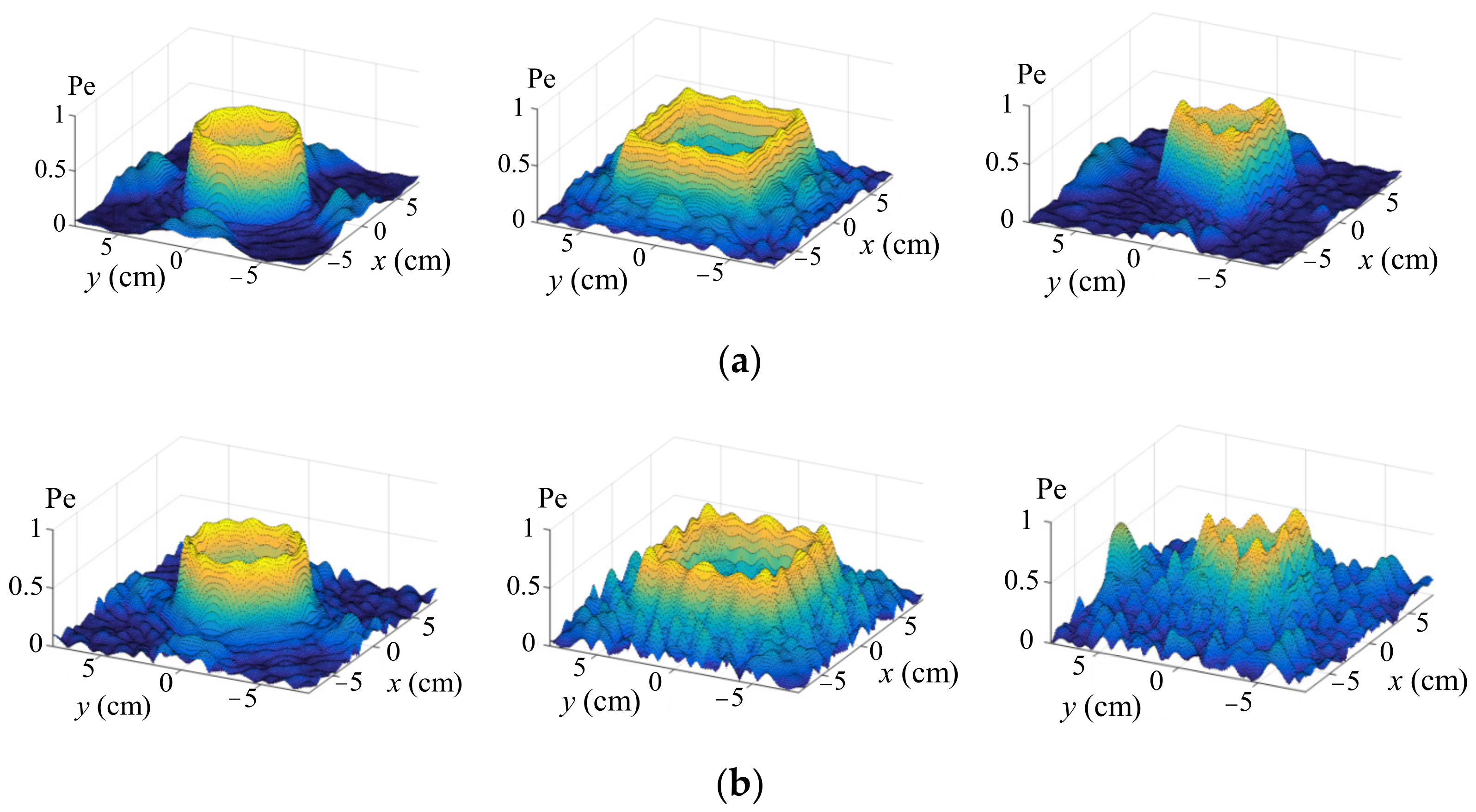
3.3. Complex Focal Simulation
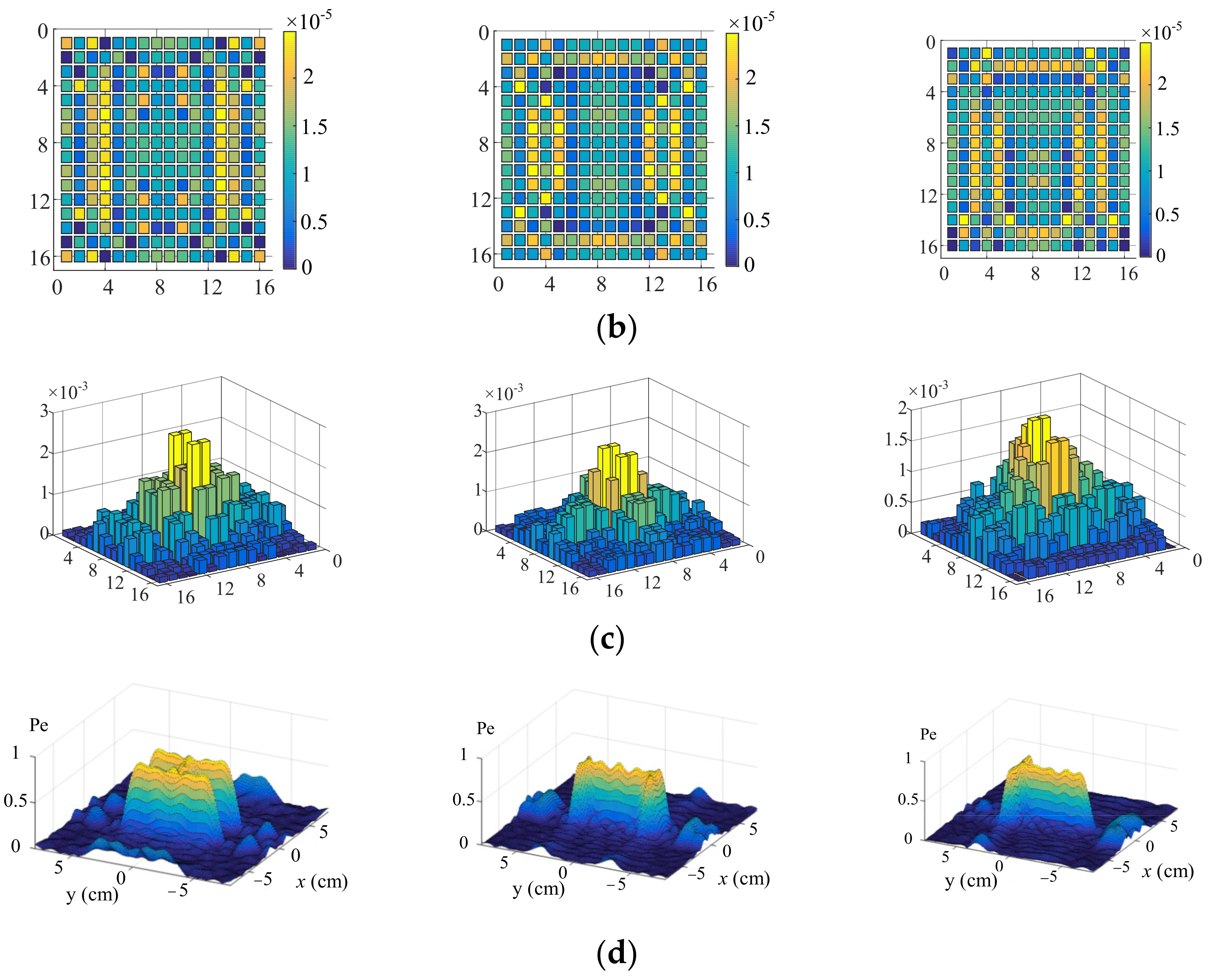
3.4. Uniform Amplitude Optimization
4. Experiment
4.1. Experimental Platform
4.2. Single-Point Haptic Feedback
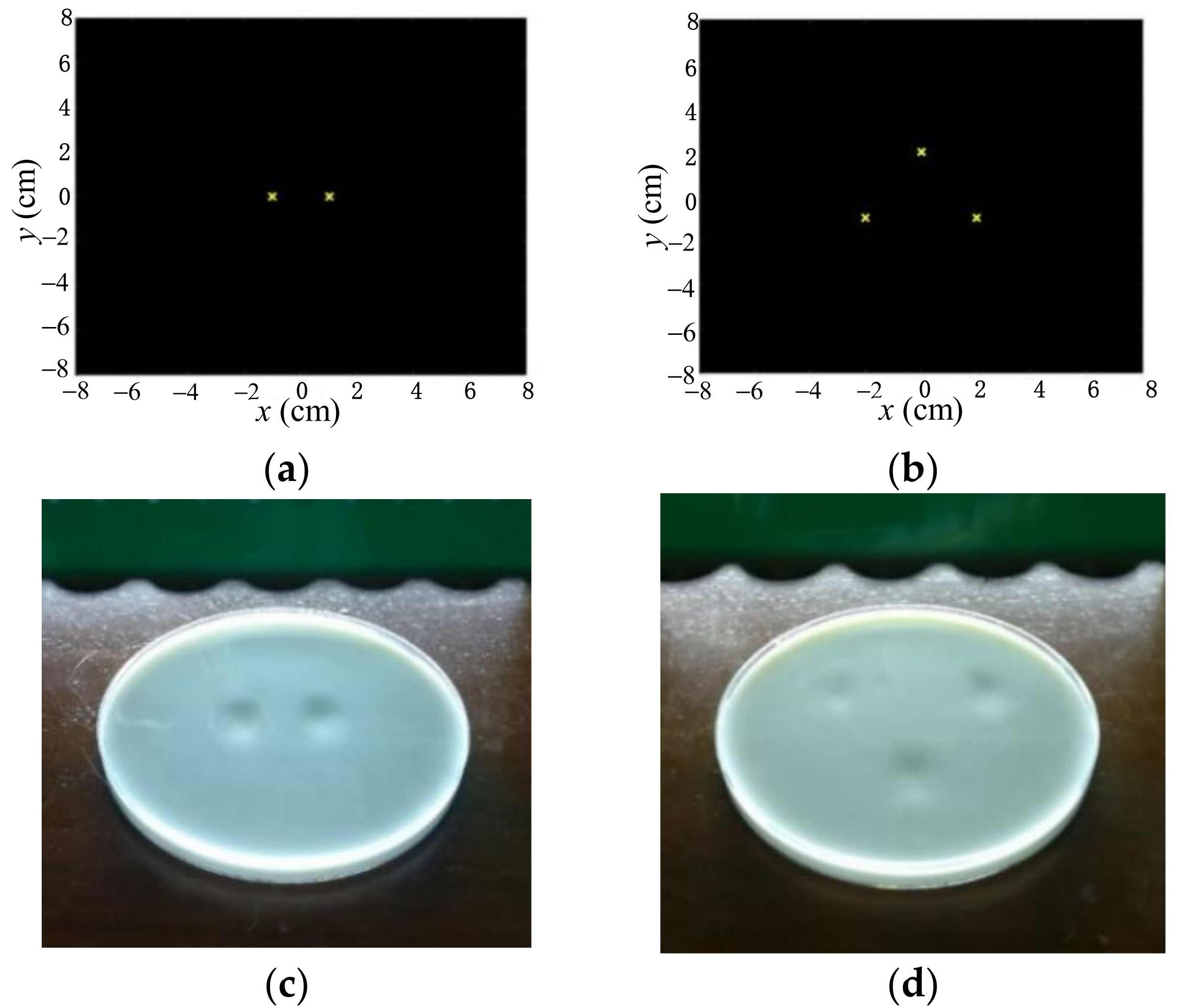
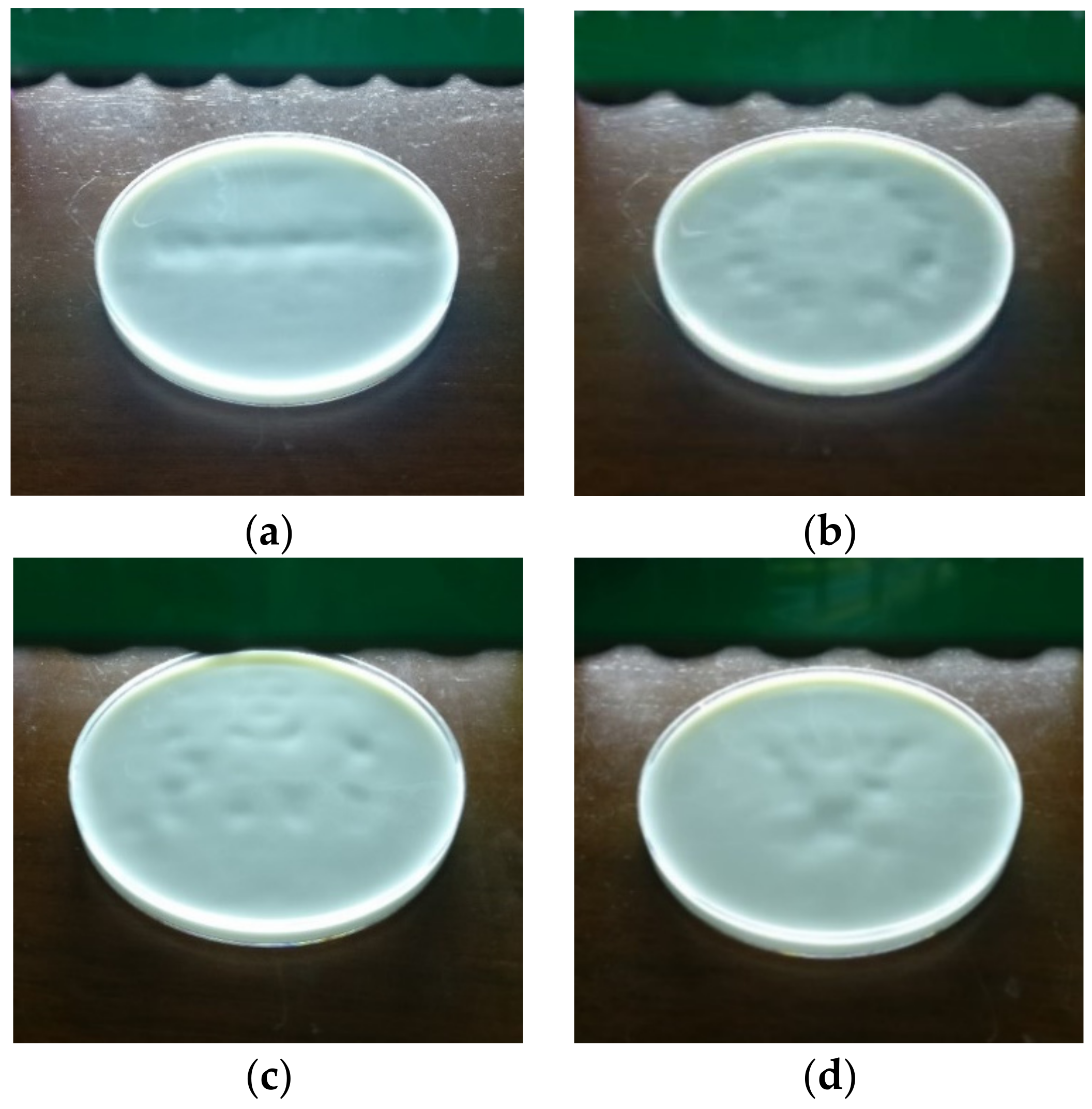
4.3. Multipoint Haptic Feedback
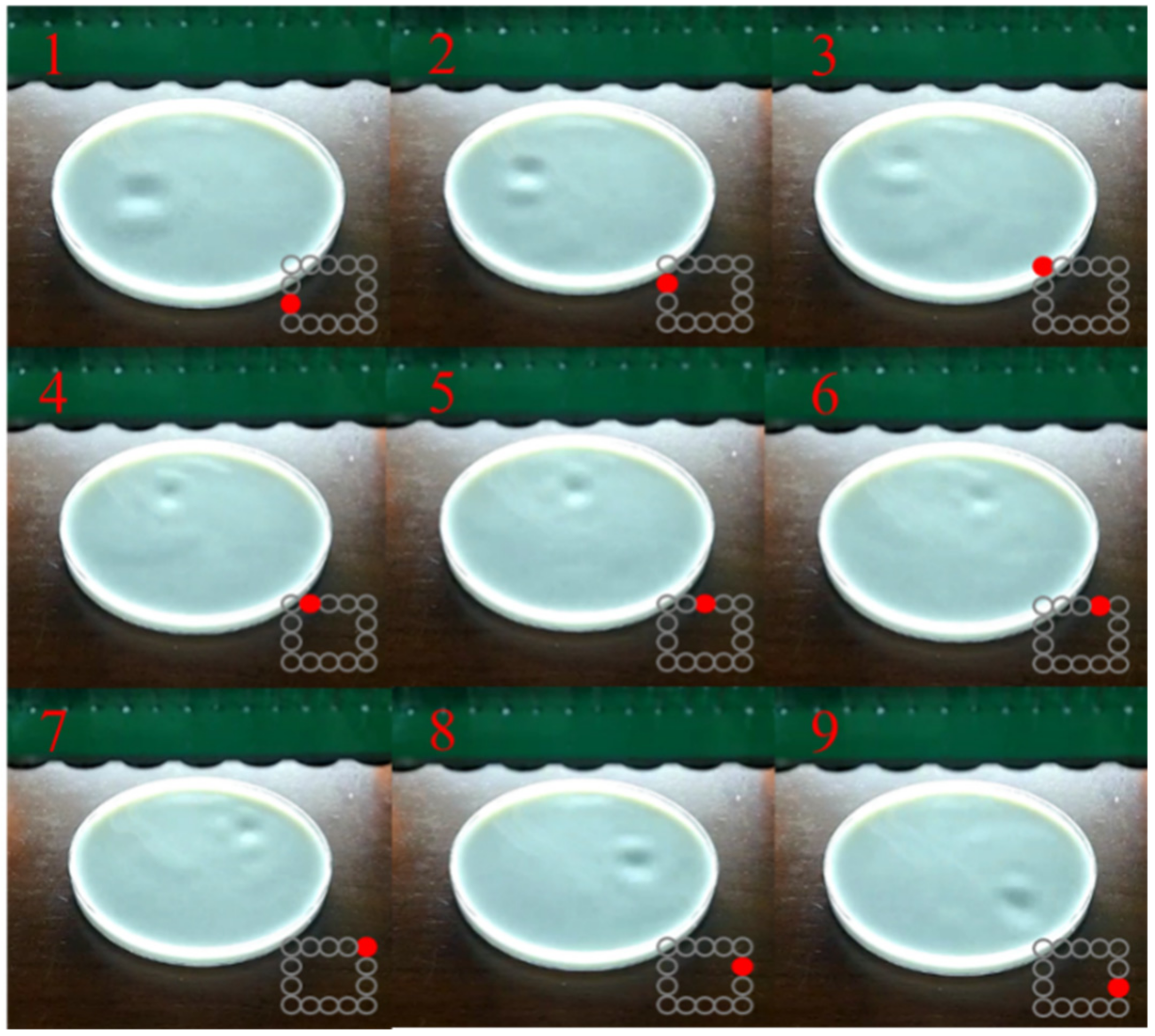
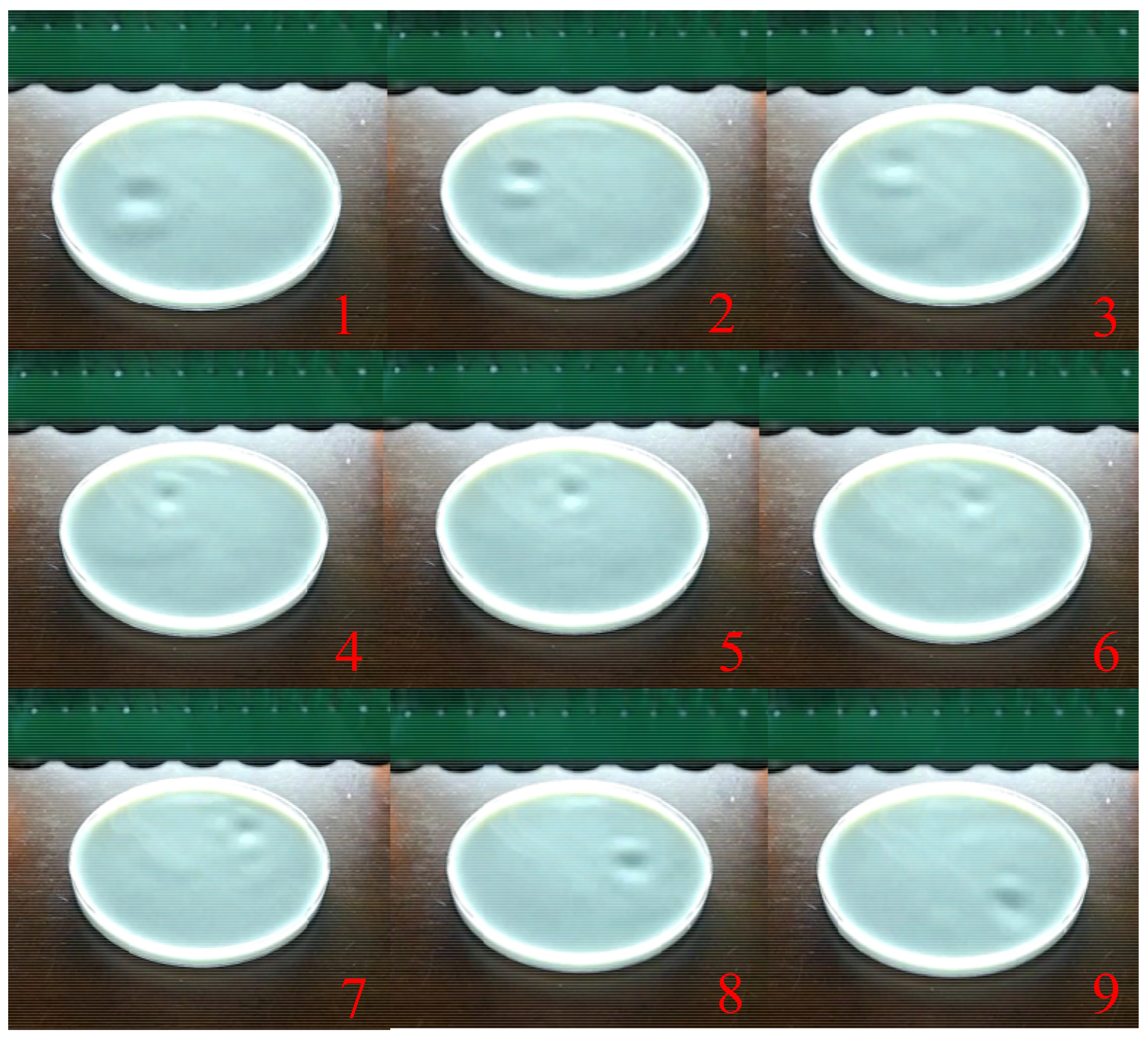
4.4. Dynamic Trajectory Tactile Feedback Experiment
5. Conclusions
- (1)
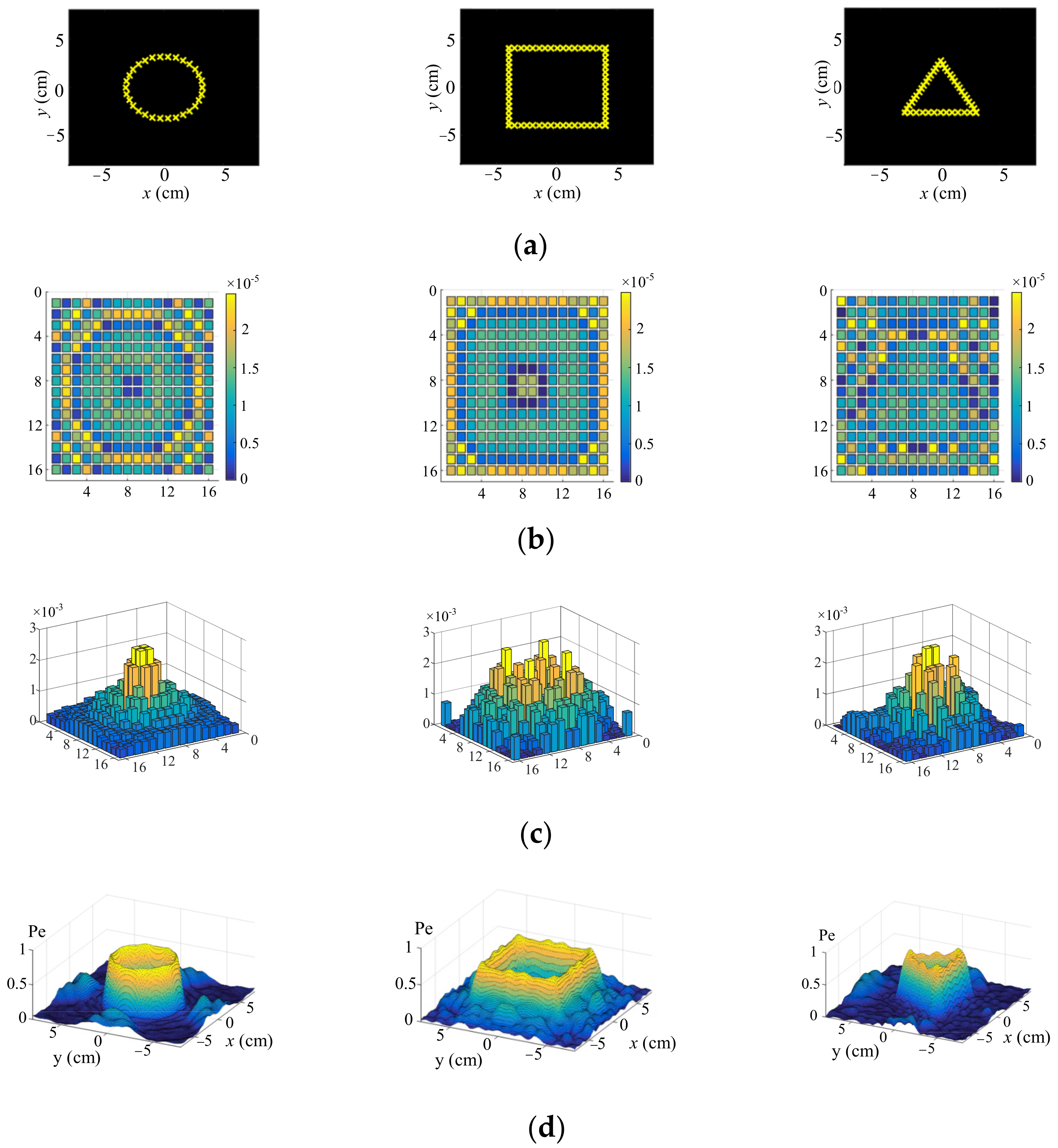
- To achieve the ultrasound-based noncontact haptic feedback, we investigated the relationship between the emission force and the controlled phase of each transducer in the ultrasound phase array. By the superposition of the ultrasound radiation force by appropriate phase combination, we successfully achieved the haptic feedback of complex shapes such as a circle, a square, a triangle and letters. The novel technology has great potential for application in haptic perception and HCI due to the advantages of a low price and low power consumption.
- (2)
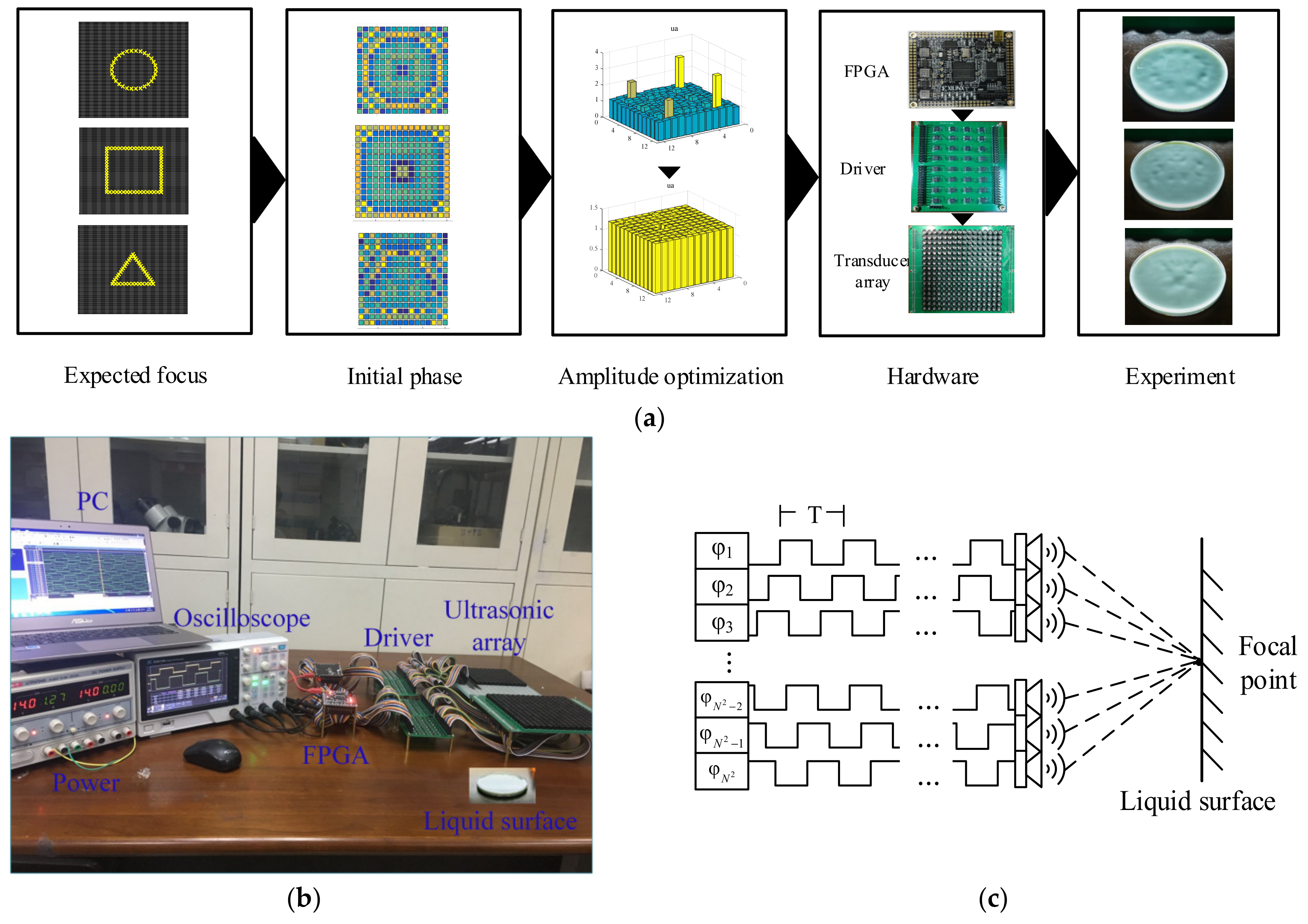
- The mathematical model of the radiation pressure of the ultrasound array was deduced. The optimization function to intelligently search the optimal phase was established, and the PINV algorithm was introduced to effectively solve the control phase issue. To address the inconsistent amplitudes in the PINV solutions, a weighted iterative optimization approach was proposed to further enhance the amplitude of the ultrasound array, making the electrical driving module trigger the transducer array in a uniform voltage. With these, we carried out a simulation to visualize the multipoint haptic feedback of complex shapes such as a circle, a rectangle, a triangle and letters.
- (3)
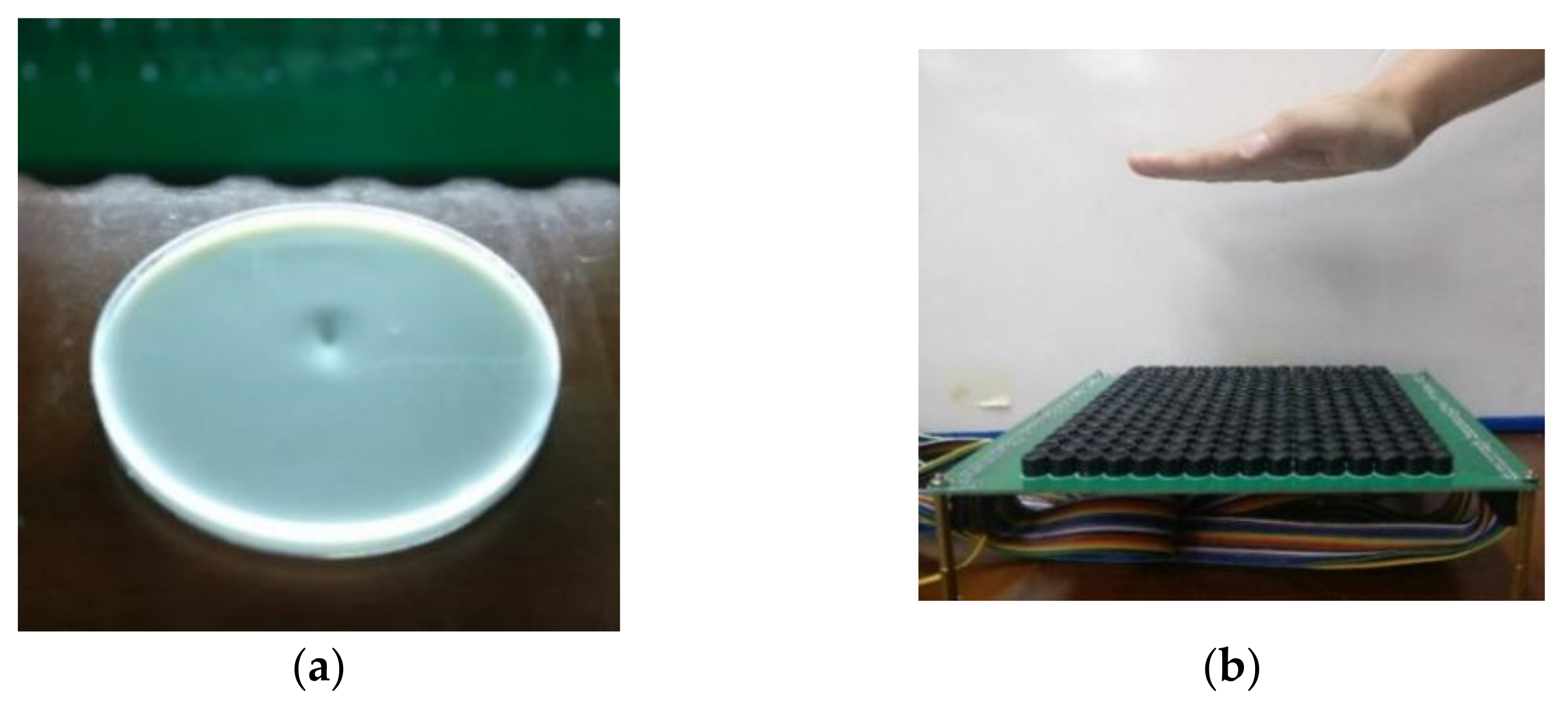
- For the experiment, we built the control and driving systems based on an FPGA controller. The ultrasound focal force on the liquid surface was tested. Experimental verification of the single- and multipoint and the square dynamic trajectory was conducted to visualize the corresponding ultrasound pressures and focusing distributions. Experimental results prove that the proposed phase optimization and the electrical control system are feasible options for ultrasound-based haptic feedback.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Truong, X.-T.; Ngo, T.D. Toward Socially Aware Robot Navigation in Dynamic and Crowded Environments: A Proactive Social Motion Model. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1743–1760. [Google Scholar] [CrossRef]
- Maggioni, E.; Agostinelli, E.; Obrist, M. Measuring the added value of haptic feedback. In Proceedings of the 2017 Ninth International Conference on Quality of Multimedia Experience (QoMEX), Erfurt, Germany, 29 May–2 June 2017; pp. 1–6. [Google Scholar]
- Gatti, E.; Caruso, G.; Bordegoni, M.; Spence, C. Can the feel of the haptic interaction modify a user’s emotional state? In Proceedings of the 2013 World Haptics Conference (WHC), Daejeon, Korea, 14–17 April 2013; pp. 247–252. [Google Scholar]
- Neupert, C.; Matich, S.; Scherping, N.; Kupnik, M.; Werthschutzky, R.; Hatzfeld, C. Pseudo-Haptic Feedback in Teleoperation. IEEE Trans. Haptics 2016, 9, 397–408. [Google Scholar] [CrossRef] [PubMed]
- Coles, T.R.; Meglan, D.; John, N. The Role of Haptics in Medical Training Simulators: A Survey of the State of the Art. IEEE Trans. Haptics 2010, 4, 51–66. [Google Scholar] [CrossRef] [PubMed]
- Karafotias, G.; Korres, G.; Teranishi, A.; Park, W.; Eid, M. Mid-Air Tactile Stimulation for Pain Distraction. IEEE Trans. Haptics 2017, 11, 185–191. [Google Scholar] [CrossRef] [PubMed]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, D.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouzit, M.; Burdea, G.; Popescu, G.; Boian, R. The Rutgers Master II-new design force-feedback glove. IEEE/ASME Trans. Mechatronics 2002, 7, 256–263. [Google Scholar] [CrossRef] [Green Version]
- Choi, I.; Hawkes, E.W.; Christensen, D.L.; Ploch, C.J.; Foller, S. Wolverine: A wearable haptic interface for grasping in virtual reality. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 986–993. [Google Scholar]
- Qin, H.; Song, A.; Liu, Y.; Jiang, G.; Zhou, B. Design and Calibration of a New 6 DOF Haptic Device. Sensors 2015, 15, 31293–31313. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qin, H.; Song, A.; Gao, Z.; Liu, Y.; Jiang, G. A Multi-Finger Interface with MR Actuators for Haptic Applications. IEEE Trans. Haptics 2017, 11, 5–14. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, Y.; Kobayashi, M. Air jet driven force feedback in virtual reality. IEEE Comput. Graph. Appl. 2005, 25, 44–47. [Google Scholar] [CrossRef] [PubMed]
- Gupta, S.; Morris, D.; Patel, S.N.; Tan, D. AirWave: Non-Contact Haptic Feedback Using Air Vortex Rings. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 419–428. [Google Scholar]
- Sodhi, R.; Poupyrev, I.; Glisson, M.; Isar, A. AIREAL: Interactive Haptic Experiences in Free Air. ACM Trans. Graph. 2013, 32, 1–10. [Google Scholar] [CrossRef]
- Weiss, M.; Wacharamanotharm, C.; Voelker, S.; Borchers, I. FingerFlux: Near-Surface Haptic Feedback on Tabletop. In Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011; pp. 615–620. [Google Scholar]
- Tong, Q.; Yuan, Z.; Liao, X.; Zheng, M.; Yuan, T.; Zhao, J. Magnetic Levitation Haptic Augmentation for Virtual Tissue Stiffness Perception. IEEE Trans. Vis. Comput. Graph. 2017, 24, 3123–3136. [Google Scholar] [CrossRef] [PubMed]
- Ochiai, Y.; Kumagai, K.; Hoschi, T.; Hasegawa, H.; Hayasaki, Y. Cross-Field Aerial Haptics: Rendering Haptic Feedback in Air with Light and Acoustic Fields. In Proceedings of the 34th Annual CHI Conference on Human Factors in Computing Systems (CHI4GOOD), San Jose, CA, USA, 7–12 May 2016; pp. 3238–3247. [Google Scholar]
- Ochiai, Y.; Kumagai, K.; Hoshi, T.; Rekimoto, J.; Hasegawa, S.; Hayasaki, Y. Fairy Lights in Femtoseconds. ACM Trans. Graph. 2016, 35, 1–14. [Google Scholar] [CrossRef]
- Arafsha, F.; Zhang, I.; Dong, H.; Al Saddik, A. Contactless haptic feedback: State of the art. In Proceedings of the 2015 IEEE International Symposium on Haptic, Audio and Visual Environments and Games (HAVE), Ottawa, ON, Canada, 11 October 2015; pp. 24–29. [Google Scholar]
- Hoshi, T.; Iwamoto, T.; Shinoda, H. Non-contact tactile sensation synthesized by ultrasound transducers. In Proceedings of the World Haptics 2009—Third Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Salt Lake City, UT, USA, 18–20 March 2009; pp. 256–260. [Google Scholar]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Noncontact Tactile Display Based on Radiation Pressure of Airborne Ultrasound. IEEE Trans. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Hoshi, T. Development of Aerial-Input and Aerial-Haptic-Feedback System. In Proceedings of the 2011 IEEE World Haptics Conference, Istanbul, Turkey, 21–24 June 2011; pp. 569–573. [Google Scholar]
- Hasegawa, K.; Shinoda, H. Aerial Display of Vibrohaptic Sensation with High Spatial-Temporal Resolution Using Large-Aperture Airborne Ultrasound Phased Array. In Proceedings of the IEEE World Haptics Conference, Daejeon, Korea, 14–17 April 2013; pp. 31–36. [Google Scholar]
- Monnai, H.; Hasegawa, K.; Fujiwara, F.; Yoshino, K.; Inoue, S.; Shidona, H. HaptoMime: Mid-Air Haptic Interaction with A Floating Virtual Screen. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5–8 October 2014; pp. 663–667. [Google Scholar]
- Inoue, S.; Makino, Y.; Shinoda, H. Producing airborne ultrasonic 3D tactile image by time reversal field rendering. In Proceedings of the 2014 Proceedings of the SICE Annual Conference (SICE), Sapporo, Japan, 9–12 September 2014; pp. 1360–1365. [Google Scholar]
- Hasegawa, K.; Qiu, L.; Shinoda, H. Midair Ultrasound Fragrance Rendering. IEEE Trans. Visual. Comput. Graph. 2018, 24, 1477–1485. [Google Scholar] [CrossRef] [PubMed]
- Gavrilov, L.R. The possibility of generating focal regions of complex configurations in application to the problems of stimulation of human receptor structures by focused ultrasound. Acoust. Phys. 2008, 54, 269–278. [Google Scholar] [CrossRef]
- Carter, T.; Seah, S.A.; Long, B.; Drinkwater, B.; Subramanian, S. UltraHaptics: Multi-Point Mid-Air Haptic Feedback for Touch Surfaces. In Proceedings of the ACM Symposium on User Interface Software and Technology, St. Andrews, UK, 8–11 October 2013; pp. 505–514. [Google Scholar]
- Long, B.; Seah, S.A.; Carter, T.; Subramanian, S. Rendering volumetric haptic shapes in mid-air using ultrasound. ACM Trans. Graph. 2014, 33, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Roemer, R.; Swindell, W.; Clegg, S.; Kress, R.L. Simulation of focused, scanned ultrasonic heating of deep seated tumors. IEEE Trans. Sonics Ultrason. 1984, 31, 457–466. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 0: Initialize W = I, I is the identity matrix. |
| Step 1: computeuw and η by the following expression, |
| If η is sufficient, then go to Step 3. |
| Otherwise, update H*T as, |
| H*T = WH*T |
| Step 2: Evaluate the updated the weighting matrix W, |
| Go to step 1. |
| where {uwn, n = 1, 2, …, N2} contains the elements of the vector uw. |
| Step 3: The excitation vector u = uw. |
| Forecast | Up Stroke | Down Stroke | Left Stroke | Right Stroke | Circular | Rectangle | Triangle | Correct Rate | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Actual | ||||||||||
| Number | ||||||||||
| Up stroke | 17 | 0 | 0 | 0 | 0 | 0 | 0 | 100% | ||
| Down stroke | 0 | 17 | 0 | 0 | 0 | 0 | 0 | 100% | ||
| Left stroke | 0 | 0 | 17 | 0 | 0 | 0 | 0 | 100% | ||
| Right stroke | 0 | 0 | 0 | 17 | 0 | 0 | 0 | 100% | ||
| Circular | 0 | 0 | 0 | 0 | 13 | 3 | 1 | 76% | ||
| Rectangle | 0 | 0 | 0 | 0 | 6 | 6 | 5 | 35% | ||
| Triangle | 0 | 0 | 0 | 0 | 7 | 1 | 9 | 53% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, Z.; Ye, S.; Peng, Z.; Yuan, Y.; Li, Z. Phase Optimization for Multipoint Haptic Feedback Based on Ultrasound Array. Sensors 2022, 22, 2394. https://doi.org/10.3390/s22062394
Long Z, Ye S, Peng Z, Yuan Y, Li Z. Phase Optimization for Multipoint Haptic Feedback Based on Ultrasound Array. Sensors. 2022; 22(6):2394. https://doi.org/10.3390/s22062394
Chicago/Turabian StyleLong, Zhili, Shuyuan Ye, Zhao Peng, Yuyang Yuan, and Zhuohua Li. 2022. "Phase Optimization for Multipoint Haptic Feedback Based on Ultrasound Array" Sensors 22, no. 6: 2394. https://doi.org/10.3390/s22062394