
On-Orbit Absolute Radiometric Calibration and Validation of ZY3-02 Satellite Multispectral Sensor


Abstract
:1. Introduction
2. Materials
2.1. Overview of ZY3-02 Satellite
2.2. ZY3-02 Multispectral Imager (MUX)
2.3. Calibration Site and Targets
2.3.1. Baotou Calibration Site
2.3.2. The Gray-Scale Permanent Artificial Targets
2.3.3. The Calibration Tarps
3. Methodology
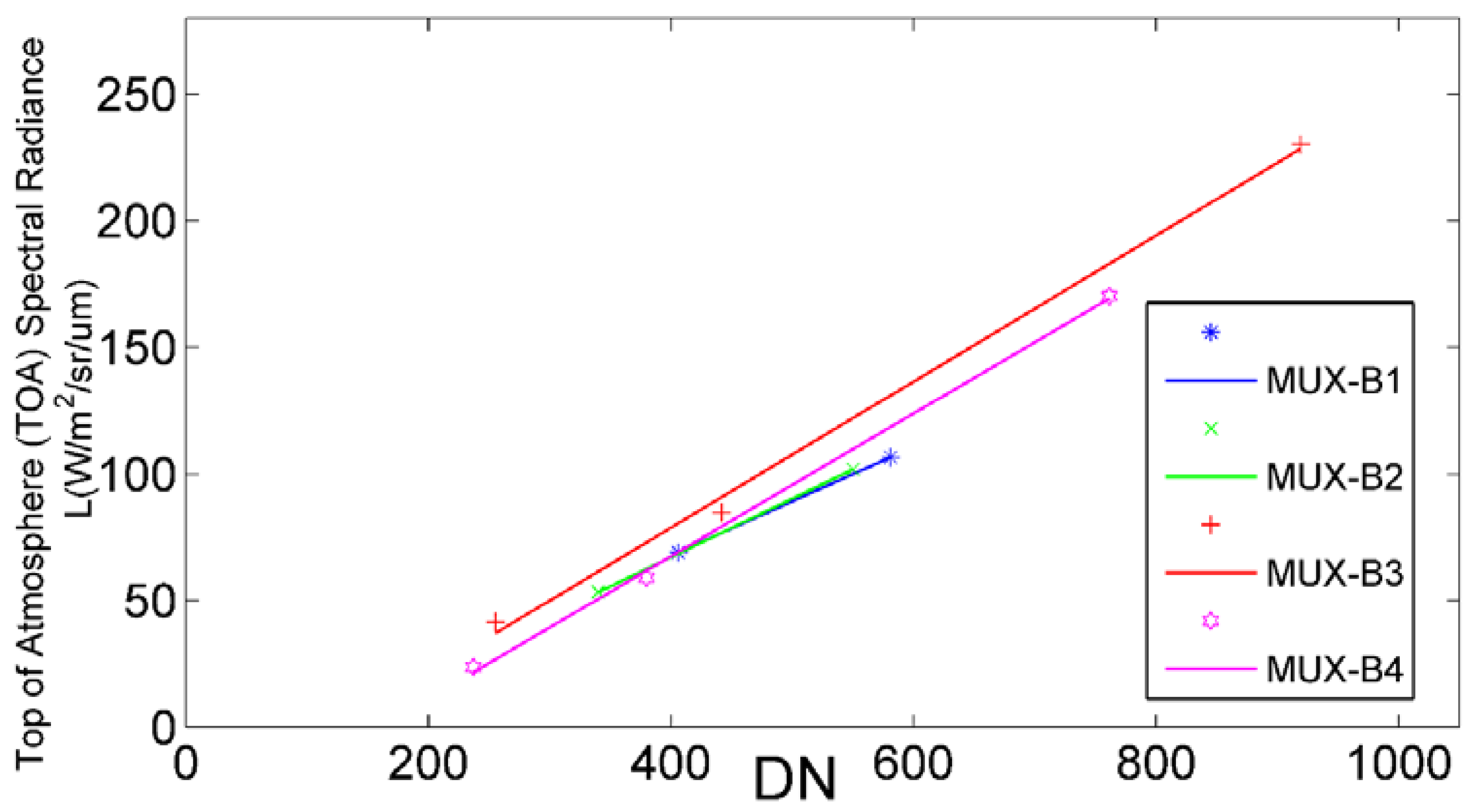
3.1. Radiometric Calibration Approaches
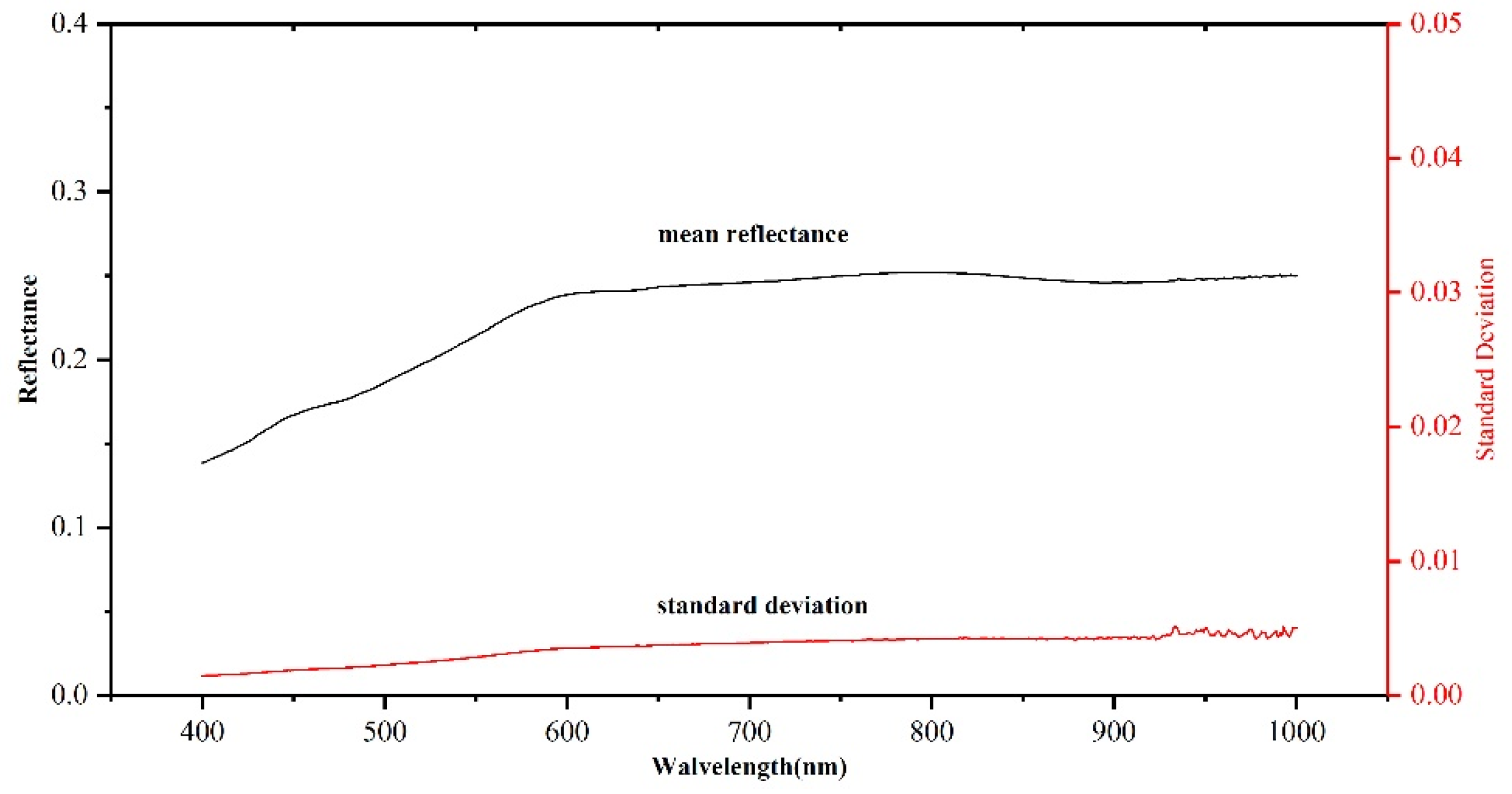
3.2. Synchronous Measurement of Surface Reflectance
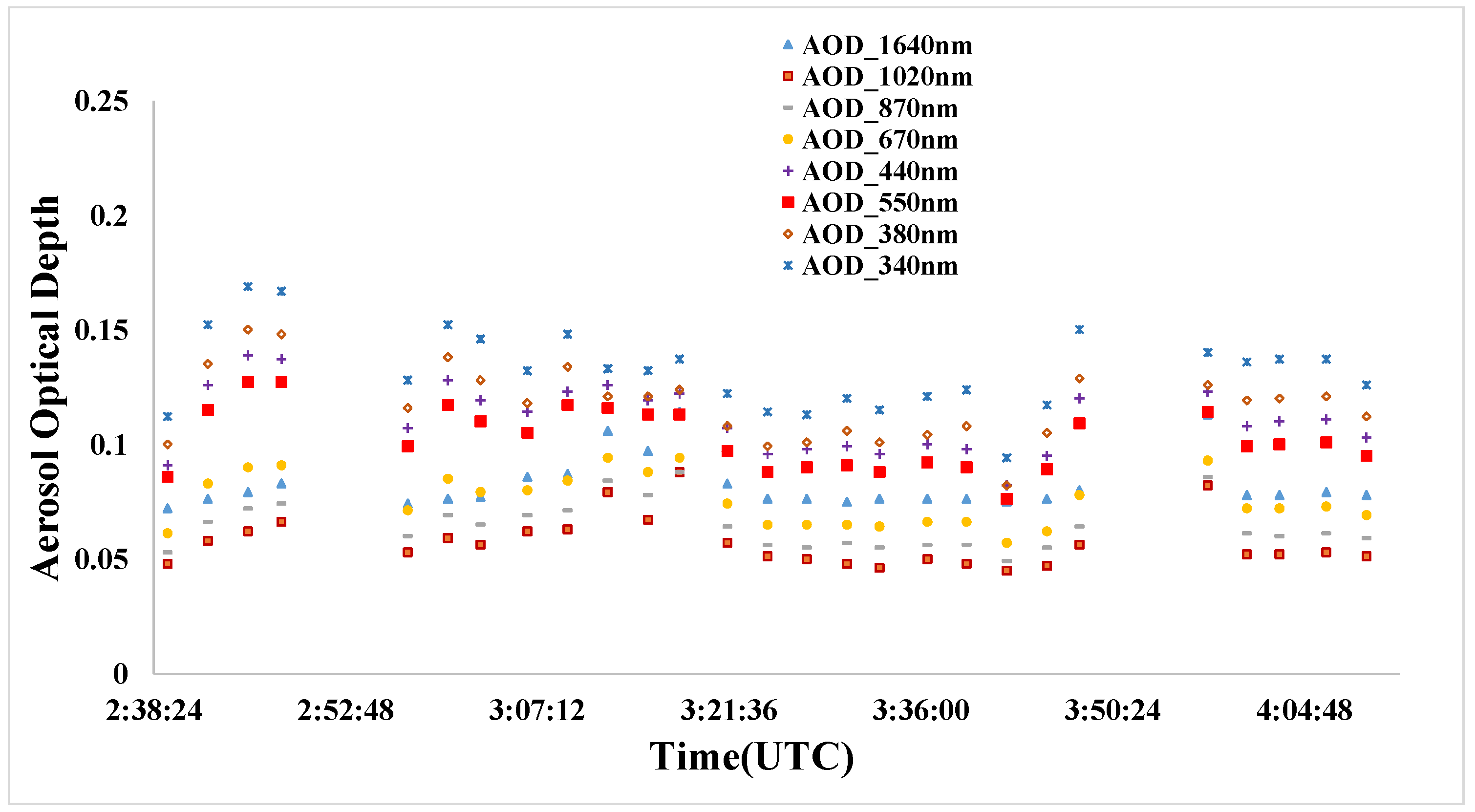
3.3. Synchronous Measurement of Atmospheric Parameters
3.4. Radiative Transfer Calculations
4. Results
4.1. Comparison of Three Radiometric Calibration Results from Different Targets
4.2. Uncertainty Analysis of the Reflectance-Based Approach
4.3. Validation of Three Radiometric Calibration Coefficients
4.4. Cross-Validation with Landsat-8 OLI Using the Three Determined Radiometric Calibration Coefficients
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thome, K.J. Absolute Radiometric Calibration of Landsat 7 ETM+ Using the Reflectance-Based Method. Remote Sens. Environ. 2001, 78, 27–38. [Google Scholar] [CrossRef]
- Biggar, S.F.; Dinguirard, M.C.; Gellman, G.I.; Henry, P.; Jackson, R.D.; Moran, M.S.; Slater, P.N. Radiometric Calibration of SPOT 2 HRV-a Comparison of Three Methods. Proc. SPIE 1991, 1493, 155–162. [Google Scholar]
- Dinguirard, M.; Slater, P.N. Calibration of Space-Multispectral Imaging Sensors: A Review. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Gao, H.L.; Gu, X.F.; Yu, T. The Research Overview on Visible and Near-infrared Channels Radiometric Calibration of Space-borne Optical Remote Sensors. Remote Sens. Inf. 2010, 4, 12. [Google Scholar]
- Frouin, R.; Gautier, C. Calibration of NOAA-7 AVHRR, GOES-5, and GOES-6 VISSR/VAS solar channels. Remote Sens. Environ. 1987, 22, 73–101. [Google Scholar] [CrossRef] [Green Version]
- Pagnutti, M.; Ryan, R.E.; Kelly, M.; Holekamp, K.; Zanoni, V.; Thome, K.; Schiller, S. Radiometric characterization of IKONOS multispectral imagery. Remote Sens. Environ. 2003, 88, 53–68. [Google Scholar] [CrossRef] [Green Version]
- Xiong, X.; Barnes, W.; Xie, X.; Salomonson, V. On-orbit performance of Aqua MODIS on-board calibrators. Proc. SPIE 2005, 5978, 75–80. [Google Scholar]
- Ponzoni, F.J.; Junior, J.Z.; Lamparelli, R. In-flight absolute calibration of the CBERS-2 CCD sensor data. An. Acad. Bras. Ciênc. 2008, 80, 799–804. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Liu, J.; Sun, L.; Rong, Z.; Li, Y.; Zhang, Y.; Zheng, Z.; Wu, R.; Zhang, L.; Gu, X. Characterization of CRCS Dunhuang test site and vicarious calibration utilization for Fengyun (FY) series sensors. Can. J. Remote Sens. 2010, 36, 566–582. [Google Scholar] [CrossRef]
- Naughton, D.; Brunn, A.; Czapla-Myers, J.; Douglass, S.; Thiele, M.; Weichelt, H.; Oxfort, M. Absolute radiometric calibration of the RapidEye multispectral imager using the reflectance-based vicarious calibration method. J. Appl. Remote Sens. 2011, 5, 3544. [Google Scholar] [CrossRef]
- Pinto, C.; Ponzoni, F.; Castro, R.; Leigh, L.; Mishra, N.; Aaron, D.; Helder, D. First in-Flight Radiometric Calibration of MUX and WFI on-Board CBERS-4. Remote Sens. 2016, 8, 405. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.K.; Ma, L.L.; Wang, N.; Qian, Y.G.; Zhao, Y.G.; Qiu, S.; Gao, C.X.; Long, X.X.; Li, C.R. On-orbit radiometric calibration of the optical sensors on-board SuperView-1 satellite using three independent methods. Opt. Express 2020, 28, 11085–11105. [Google Scholar] [CrossRef] [PubMed]
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S.; et al. RadCalNet: A Radiometric Calibration Network for Earth Observing Imagers Operating in the Visible to Shortwave Infrared Spectral Range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Ma, L.; Gao, C.; Tang, L.; Wang, N.; Liu, Y.; Zhao, Y.; Dou, S.; Zhang, D.; Li, X. Permanent target for optical payload performance and data quality assessment: Spectral characterization and a case study for calibration. J. Appl. Remote Sens. 2014, 8, 083498. [Google Scholar] [CrossRef]
- Li, C.R.; Tang, L.L.; Ma, L.L.; Zhou, Y.S.; Gao, C.X.; Wang, N.; Li, X.H.; Wang, X.H.; Zhu, X.H. A comprehensive calibration site for high resolution remote sensors dedicated to quantitative remote sensing and its applications. Natl. Remote Sens. Bull. 2021, 25, 198–219. [Google Scholar]
- Liu, Y.; Ma, L.; Wang, N.; Qian, Y.; Qiu, S.; Li, C.; Tang, L. Vicarious radiometric calibration/validation of Landsat-8 operational land imager using a ground reflected radiance-based approach with Baotou site in China. J. Appl. Remote Sens. 2017, 11, 044004. [Google Scholar] [CrossRef]
- Kim, J.; Jin, C.; Choi, C.; Ahn, H. Radiometric characterization and validation for the KOMPSAT-3 sensor. Remote Sens. Lett. 2015, 6, 529–538. [Google Scholar] [CrossRef]
- Yeom, J.-M.; Hwang, J.; Jung, J.-H.; Lee, K.-H.; Lee, C.-S. Initial Radiometric Characteristics of KOMPSAT-3A Multispectral Imagery Using the 6S Radiative Transfer Model, Well-Known Radiometric Tarps, and MFRSR Measurements. Remote Sens. 2017, 9, 130. [Google Scholar] [CrossRef] [Green Version]
- Jin, C.; Ahn, H.; Seo, D.; Choi, C. Radiometric Calibration and Uncertainty Analysis of KOMPSAT-3A Using the Reflectance-Based Method. Sensors 2020, 20, 2564. [Google Scholar] [CrossRef]
- Chen, W.; Yan, L.; Li, Z.; Jing, X.; Duan, Y.; Xiong, X. In-flight absolute calibration of an airborne wide-view multispectral imager using a reflectance-based method and its validation. Int. J. Remote Sens. 2013, 34, 1995–2005. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, H.; Li, Z.; Jing, X.; Yan, L. Uncertainty evaluation of an in-flight absolute radiometric calibration using a statistical Monte Carlo method. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2925–2934. [Google Scholar] [CrossRef]
- Biggar, F.S.; Slater, P.N.; Gellman, D.I. Uncertainties in the in-Flight Calibration of Sensors with Reference to Measured Ground Sites in the 0.4–1.1 um Range. Remote Sens. Environ. 1994, 48, 245–252. [Google Scholar] [CrossRef]
- Markham, B.; Thome, K.; Barsi, J.; Kaita, E.; Helder, D.; Barker, J.; Scaramuzza, P. Landsat-7 ETM+ on-orbit reflective-band radiometric stability and absolute calibration. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2810–2820. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The ground-based absolute radiometric calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef] [Green Version]
- Gao, H.; Gu, X.; Yu, T.; Sun, Y.; Liu, Q. Cross-Calibration of GF-1 PMS Sensor With Landsat 8 OLI and Terra MODIS. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4847–4854. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ZY3-02 Satellite | Technical Specification |
|---|---|
| Launch Schedule | May 2016 |
| Orbit | Altitude: 506 km |
| Type: sun-synchronous, | |
| Equator Crossing time: 10:30 AM | |
| Cycle: 97 min | |
| Mission duration | 5 Years |
| Image Band of Remote Sensor | Panchromatic and multi-spectral (Four-band: blue, green, red, NIR) |
| Spatial resolution | Panchromatic: nadir-view: 2.1 m (GSD) |
| forward-view (+22°): 2.5 m (GSD) | |
| backward-view (−22°): 2.5 m (GSD) | |
| Multi-spectral: nadir-view: 5.8 m (GSD) | |
| Dynamic Range | 10 bits/pixel; time-delayed integral imaging |
| Swath width | 51 km |
| Attitude determination and control | Three-axis stabilization |
| Sensors: star sensor, solid inertia reference: GPS | |
| Pointing Accuracy | 0.1° |
| Side-sway Ability | Steer up to ±32° |
| Cycle | Repeat cycle time: 59 days |
| Revisit time: 5 days |
| Band | Description | Spectral Range (nm) | Specified Spectral Range at 50% Transmittance Points(nm) | Center Wavelength (nm) | Bandwidth (nm) |
|---|---|---|---|---|---|
| 1 | Blue | 450–520 | 462.3–512.2 | 490 | 70 |
| 2 | Green | 520–590 | 515.7–587.1 | 563 | 70 |
| 3 | Red | 630–690 | 625.8–693.0 | 676 | 60 |
| 4 | NIR | 770–890 | 763.9–885.4 | 807 | 120 |
| Atmospheric Parameters | Synchronous Measurement |
|---|---|
| AOD @ 550 nm | 0.1276 |
| CWV | 0.8763 g/cm2 |
| Site | Date | Overpass Time (UTC) | Solar Zenith | Solar Azimuth | Viewing Zenith | Viewing Azimuth |
|---|---|---|---|---|---|---|
| Baotou | 20 July 2016 | 03:45:08 | 34.687 | 140.411 | 1.71 | 47.459 |
| Coefficients | A | B | C | Laboratory | ||||
|---|---|---|---|---|---|---|---|---|
| Band | Gain | Bias | Gain | Bias | Gain | Bias | Gain | Bias |
| MUX-B1 | 0.2495 | −18.36 | 0.2342 | −17.07 | 0.2291 | −11.62 | 0.2004 | −0.1794 |
| MUX-B2 | 0.2282 | −10.55 | 0.2333 | −13.60 | 0.2213 | −6.241 | 0.2031 | −0.3262 |
| MUX-B3 | 0.2542 | −15.48 | 0.2454 | −12.95 | 0.2432 | −10.29 | 0.2205 | −0.1812 |
| MUX-B4 | 0.2466 | −23.33 | 0.2261 | −16.40 | 0.2110 | −9.552 | 0.2044 | −0.4489 |
| Source of Uncertainty | Accuracy % | TOA Radiance Uncertainty % |
|---|---|---|
| Surface reflectance measurement | 2% | 2.0% |
| Lambertian assumption of targets | 1.5% | 1.5% |
| Aerosol optical depth | 0.5% | |
| Total columnar water vapor | 0.4% | |
| Aerosol size distribution | 2.0% | |
| Aerosol complex index of refraction | 2.5% | |
| MODTRAN 6.0 Radiative transfer | 2.0% | 2.0% |
| Overall Uncertainty | 4.57% |
| Band | Blue | Green | Red | NIR | |
|---|---|---|---|---|---|
| TOA Predicted Radiance by MODTRAN 6.0 | 97.233 | 106.576 | 113.235 | 96.328 | |
|
ZY3-02 MUX measured radiance | Laboratory Coefficients | 105.642 | 113.173 | 121.068 | 89.449 |
| Coefficients A | 101.327 | 112.289 | 116.940 | 90.686 | |
| Coefficients B | 102.243 | 112.587 | 118.436 | 92.375 | |
| Coefficients C | 99.419 | 109.267 | 116.530 | 93.456 | |
|
Relative difference | Diff_Lab | 8.65% | 6.19% | 6.92% | 7.14% |
| Diff_A | 4.21% | 5.36% | 3.27% | 5.86% | |
| Diff_B | 5.15% | 5.64% | 4.59% | 4.10% | |
| Diff_C | 2.25% | 2.52% | 2.91% | 2.98% | |
| Sensor | Date | Overpass Time (UTC) | Solar Zenith | Solar Azimuth | Viewing Zenith | Viewing Azimuth | AOD@ 550 nm | Cloud Condition |
|---|---|---|---|---|---|---|---|---|
| ZY3-02 MUX | 22 July 2016 | 04:31:48 | 24.966 | 137.774 | 0.899 | 186.249 | 0.0892 | no cloud |
| Landsat-8 OLI | 25 July 2016 | 04:20:20 | 27.759 | 132.077 | 0 | 51.462 | 0.1022 | no cloud |
| Calibration Coefficients | Average Relative Difference (%) | |||
|---|---|---|---|---|
| Blue | Green | Red | NIR | |
| Laboratory Coefficients | 8.86% | 6.63% | 6.06% | 7.35% |
| Coefficients A | 6.14% | 6.67% | 5.30% | 5.68% |
| Coefficients B | 5.34% | 5.73% | 5.17% | 4.43% |
| Coefficients C | 2.76% | 2.77% | 2.43% | 3.11% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, H.; Xie, J.; Tang, X.; Chen, W.; Li, Q. On-Orbit Absolute Radiometric Calibration and Validation of ZY3-02 Satellite Multispectral Sensor. Sensors 2022, 22, 2066. https://doi.org/10.3390/s22052066
Tang H, Xie J, Tang X, Chen W, Li Q. On-Orbit Absolute Radiometric Calibration and Validation of ZY3-02 Satellite Multispectral Sensor. Sensors. 2022; 22(5):2066. https://doi.org/10.3390/s22052066
Chicago/Turabian StyleTang, Hongzhao, Junfeng Xie, Xinming Tang, Wei Chen, and Qi Li. 2022. "On-Orbit Absolute Radiometric Calibration and Validation of ZY3-02 Satellite Multispectral Sensor" Sensors 22, no. 5: 2066. https://doi.org/10.3390/s22052066