
Silicone Rubber Fabry-Perot Pressure Sensor Based on a Spherical Optical Fiber End Face

Abstract
:1. Introduction
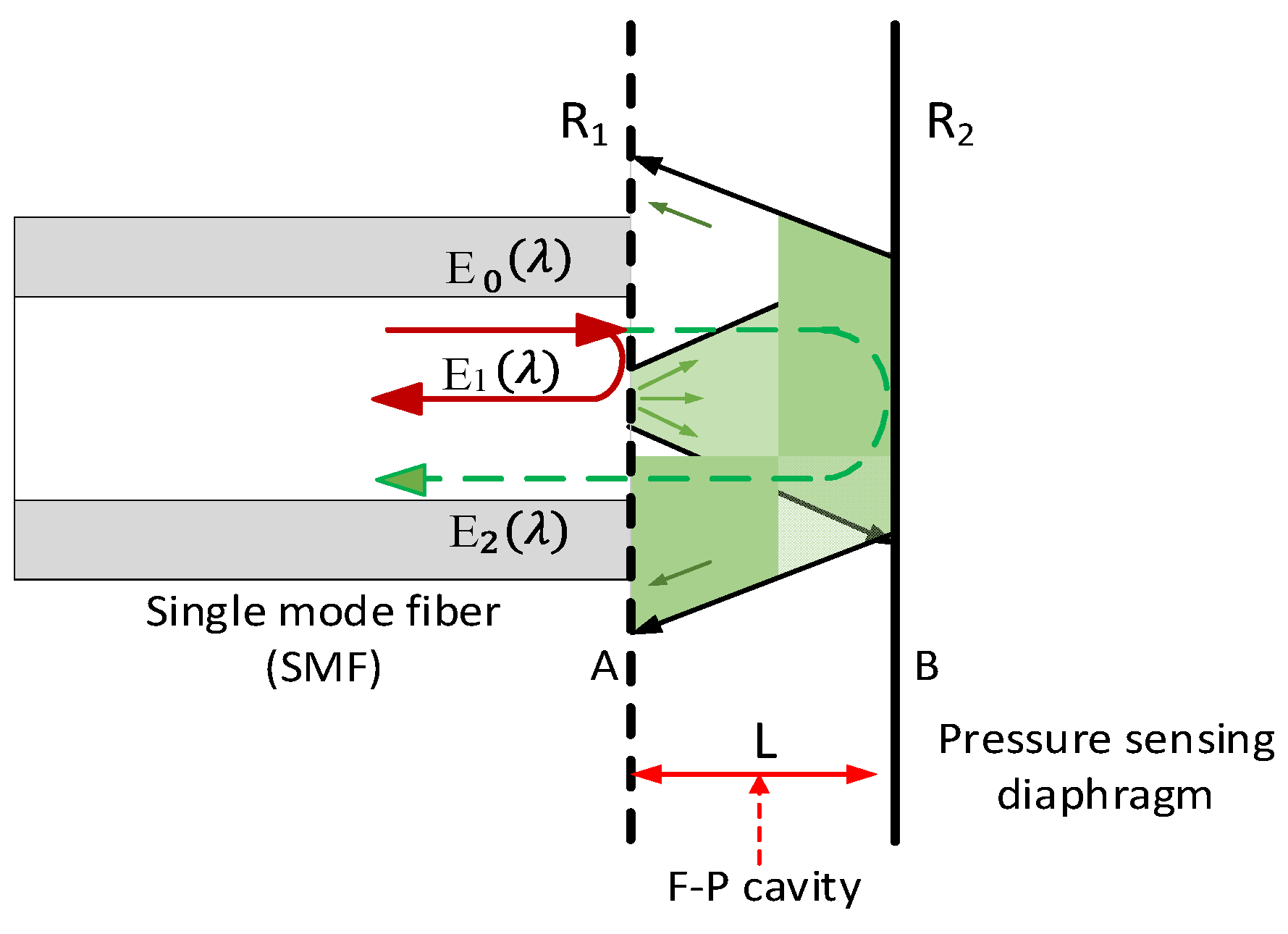
2. Fringe Contrast Analysis of FP Pressure Sensors
3. Sensor Design Based on a Spherical End Face
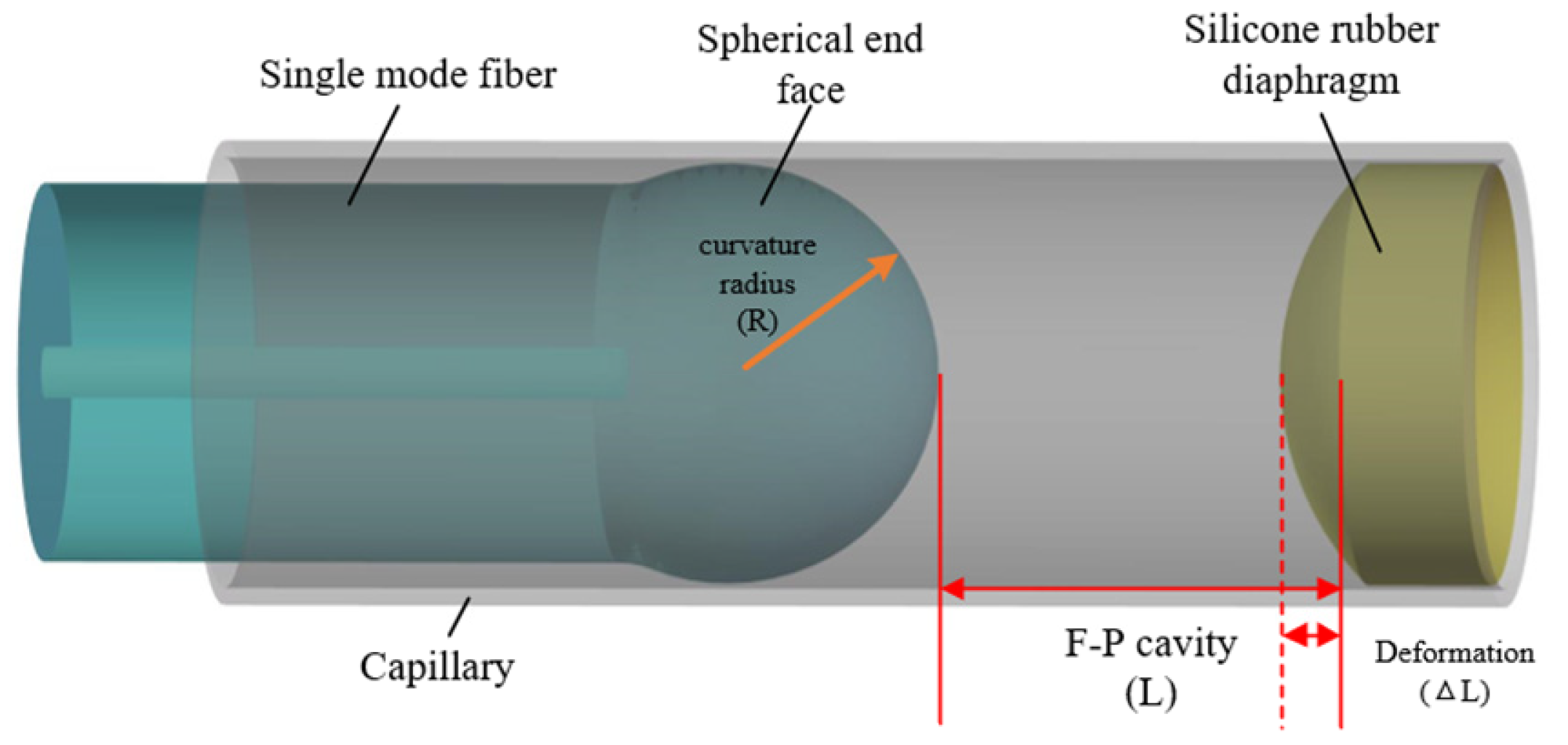
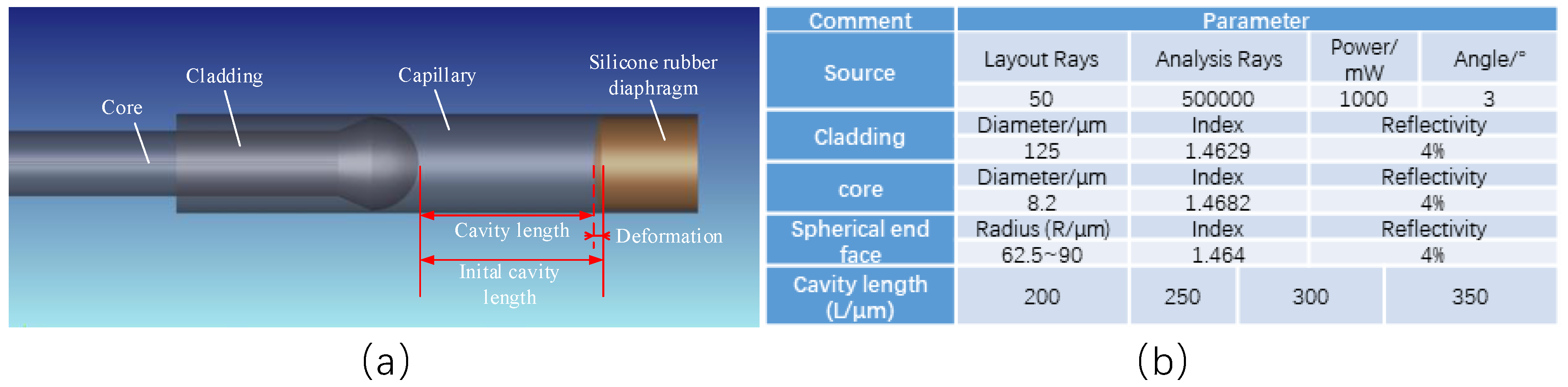
3.1. Sensor Structure
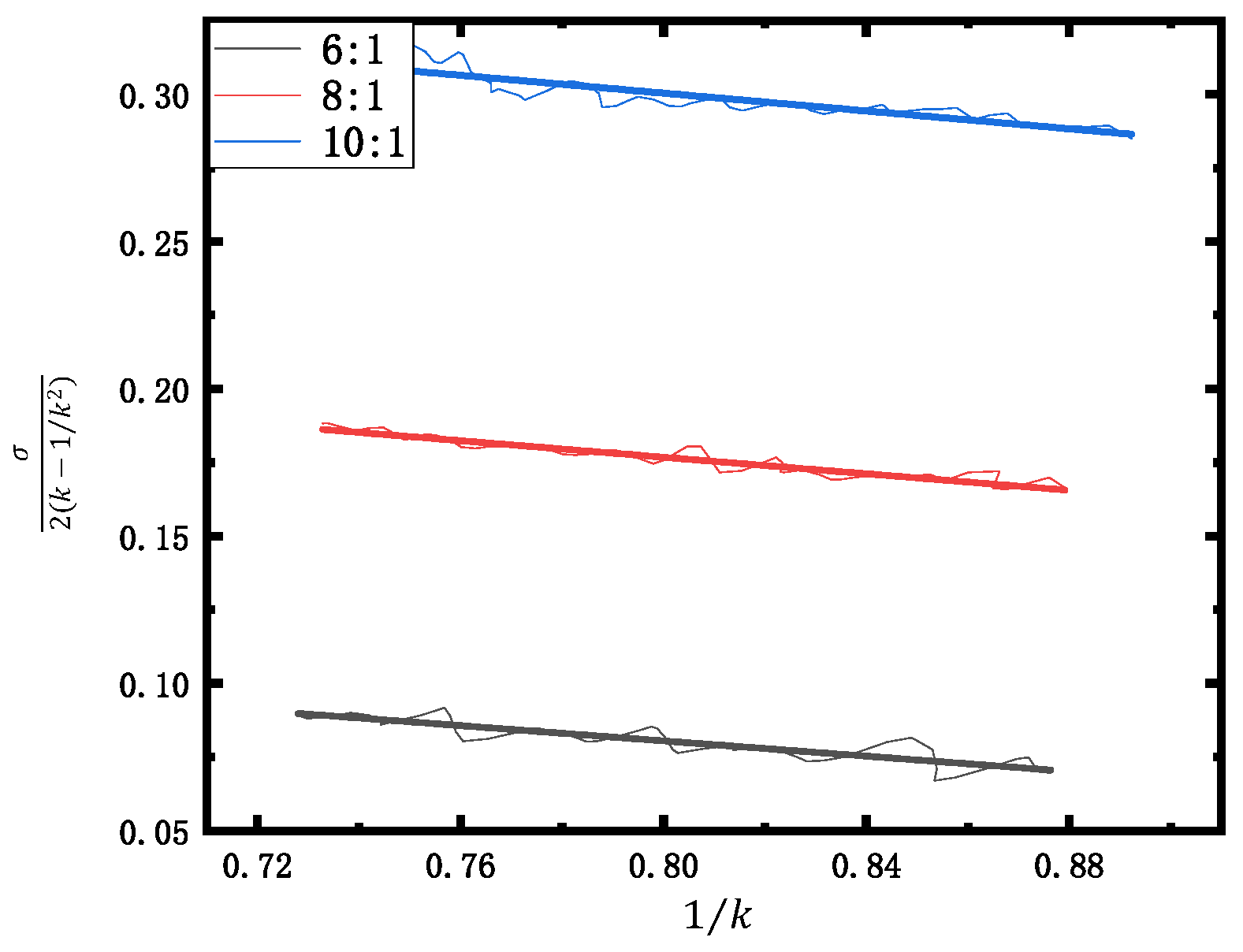
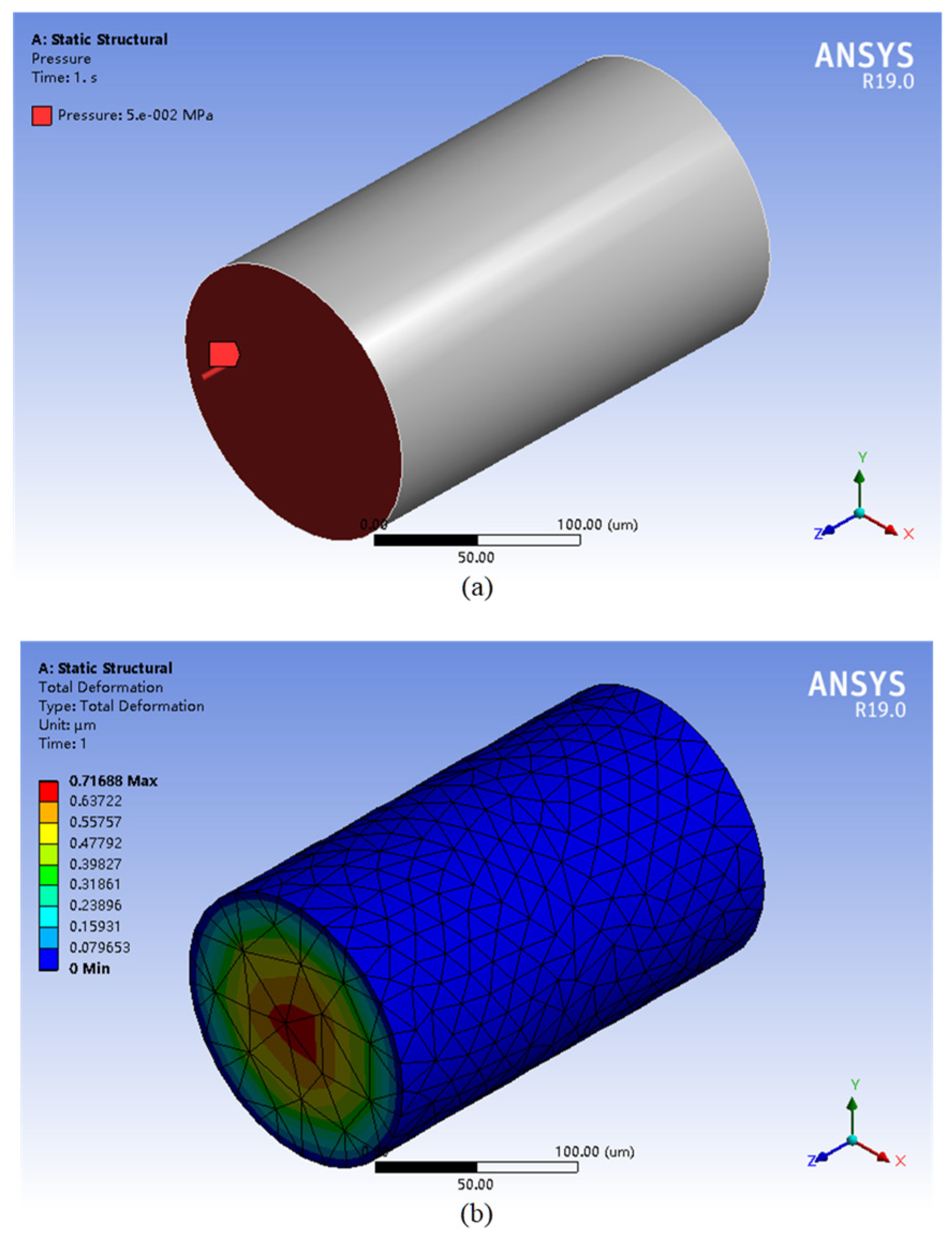
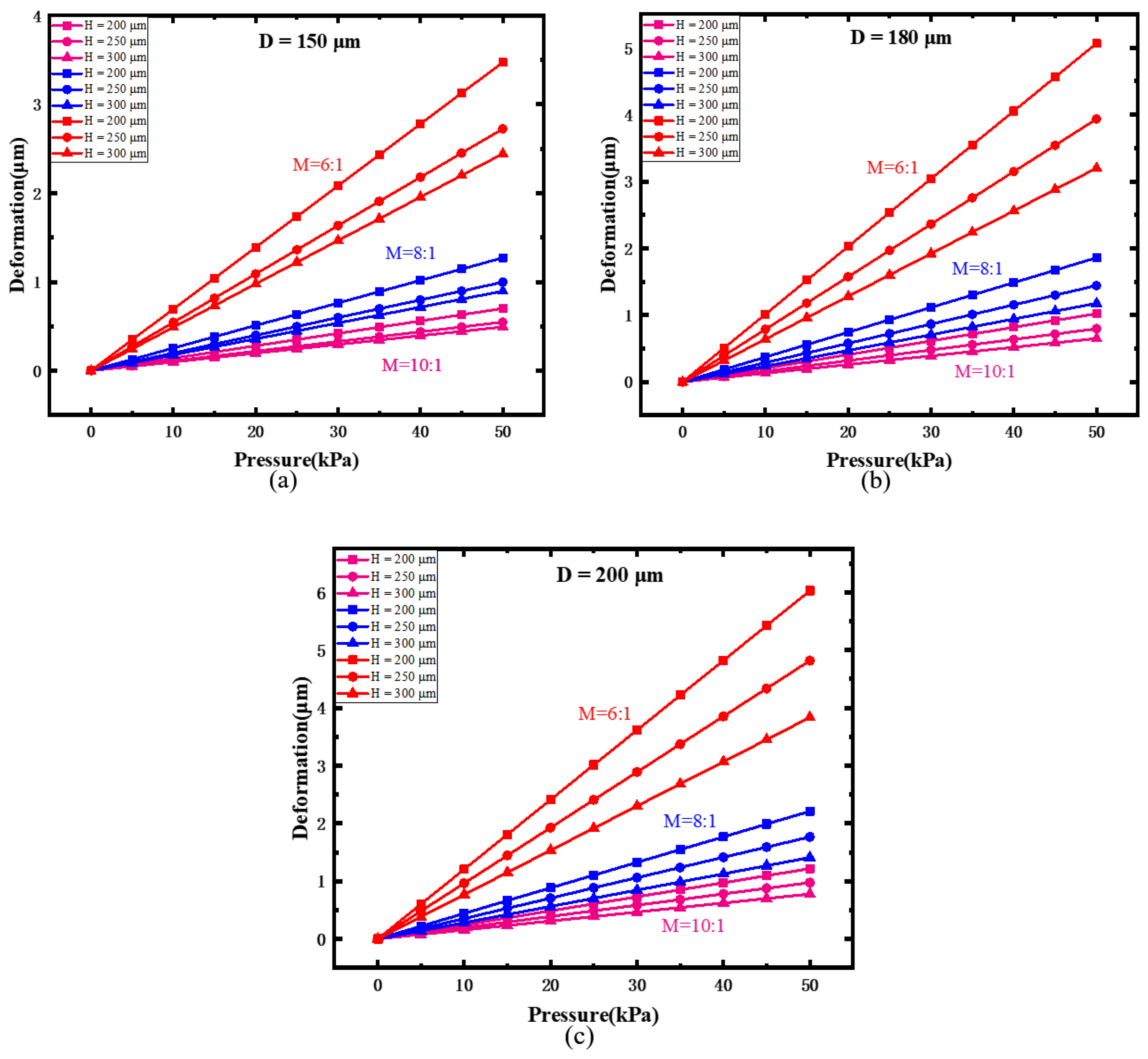
3.2. Parameters Optimization of Silicone Rubber Diaphragm
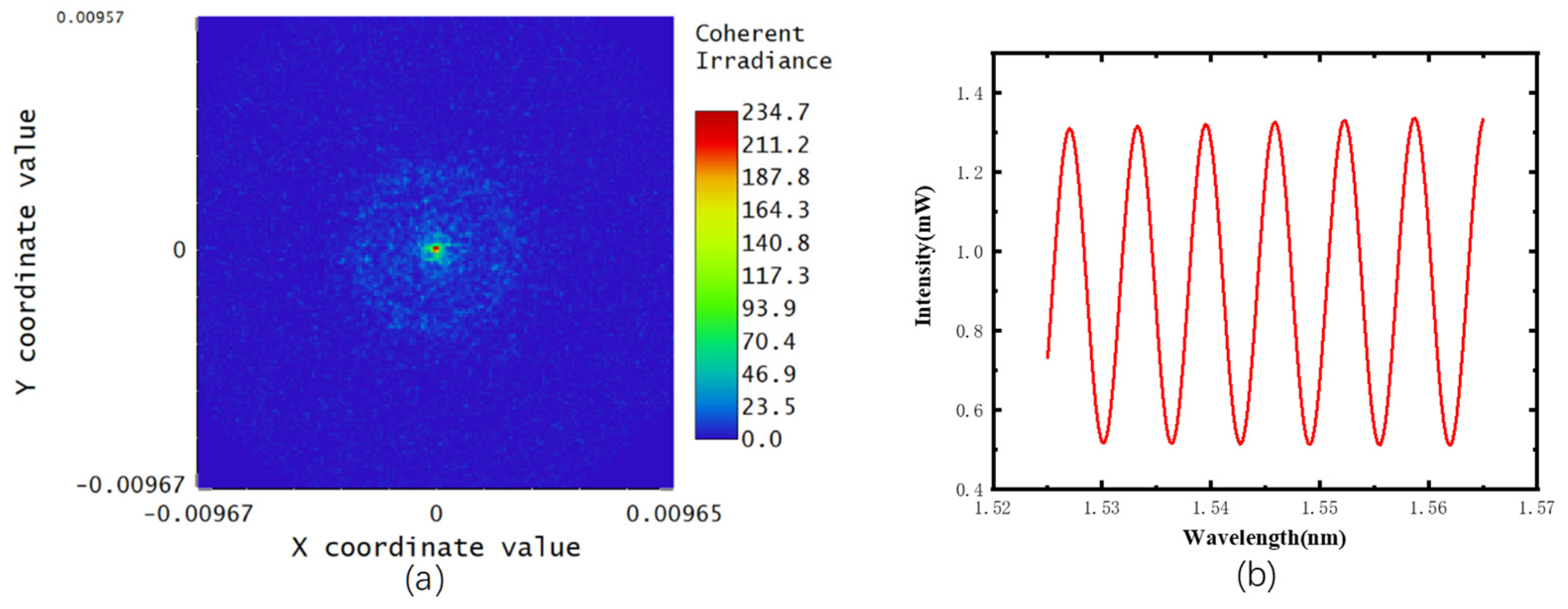
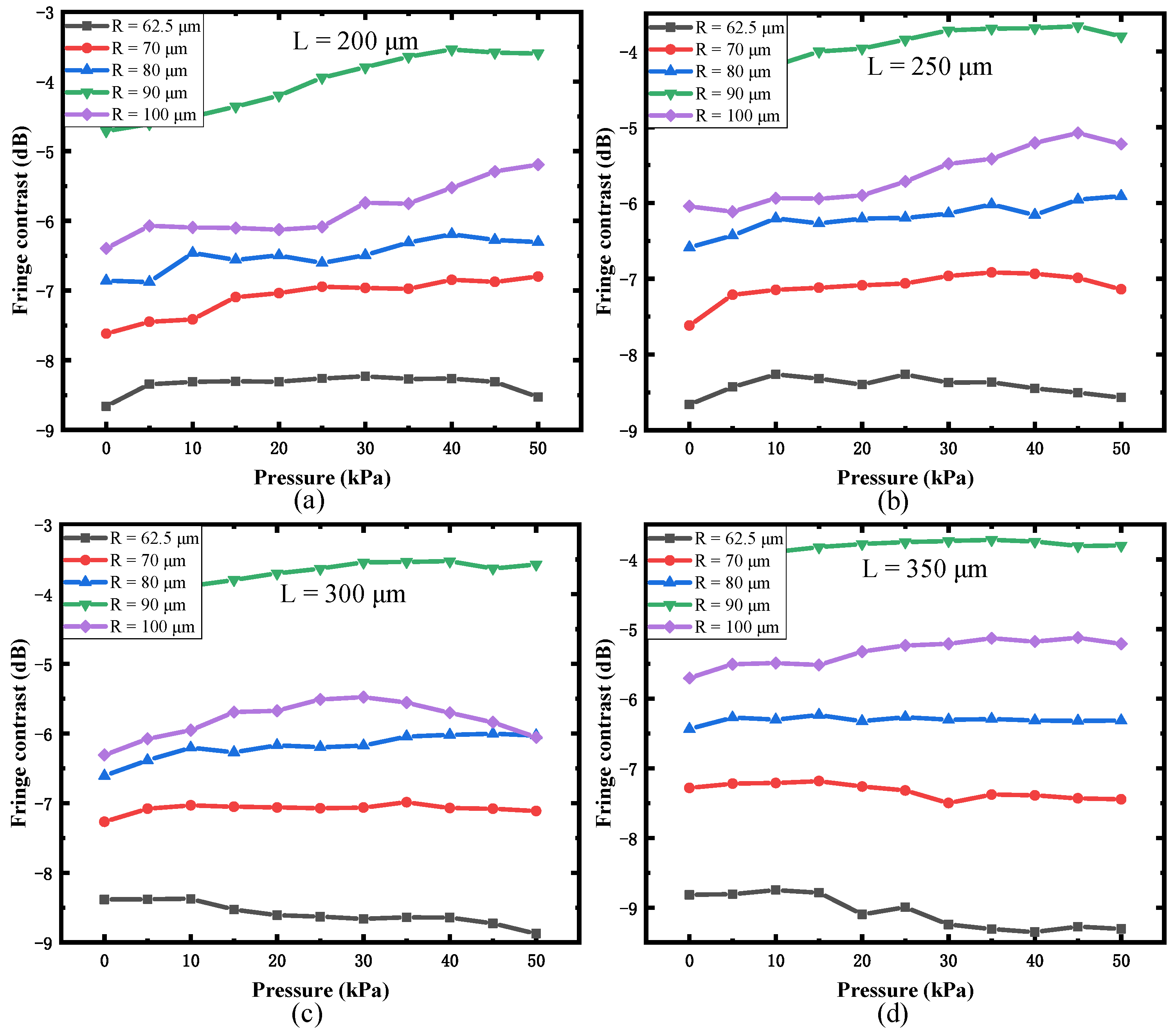
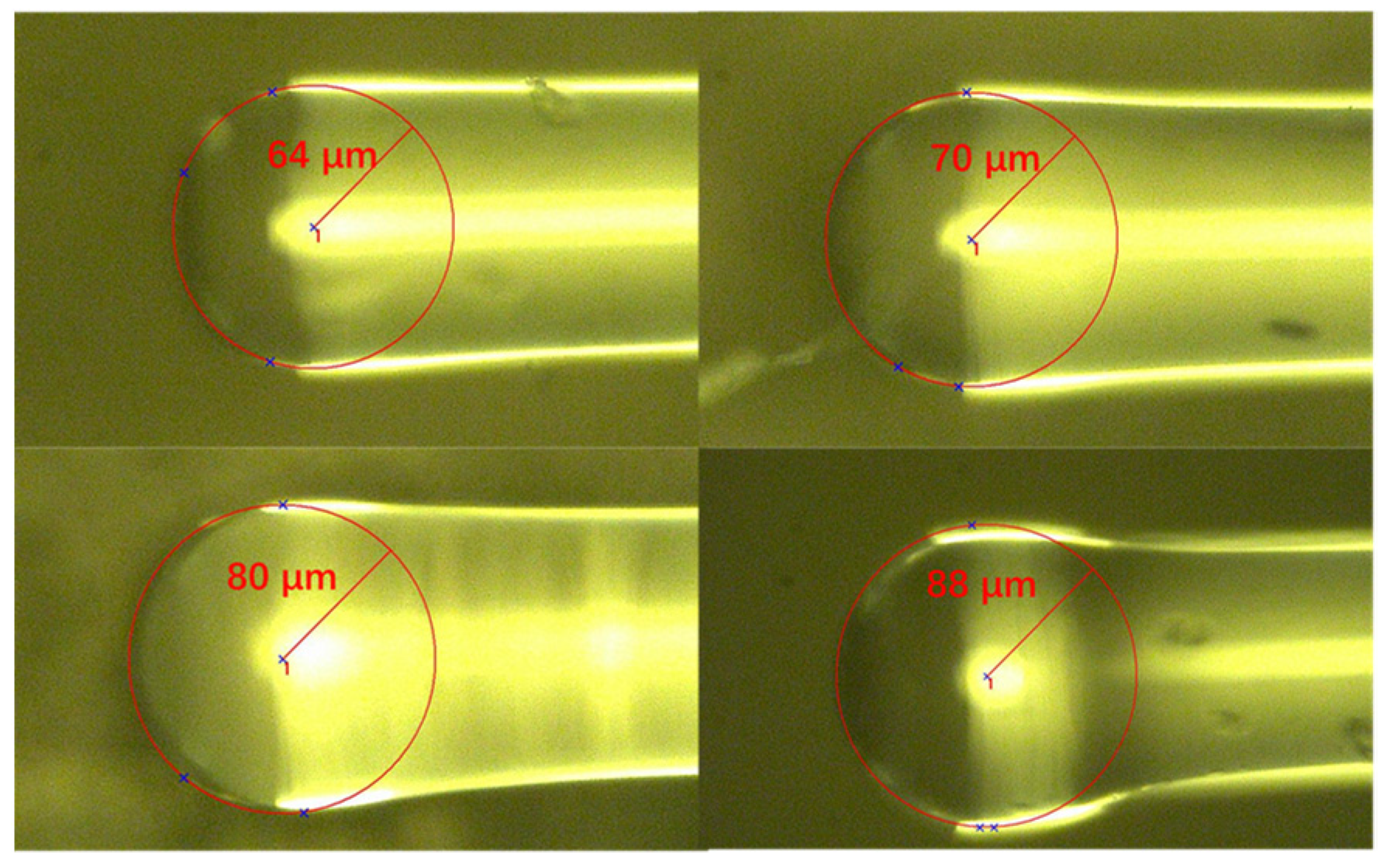
3.3. Optimization of the Spherical End Face
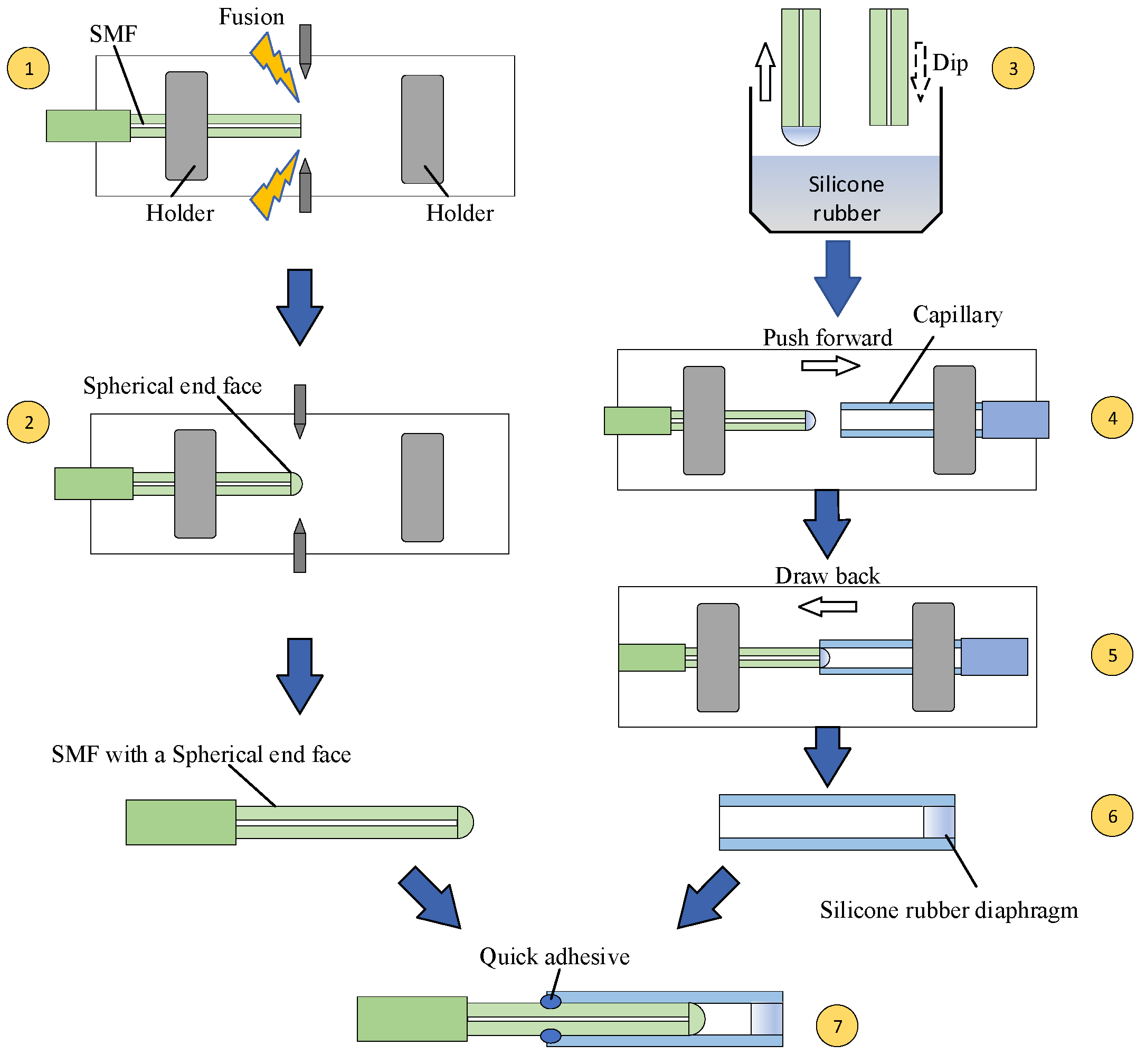
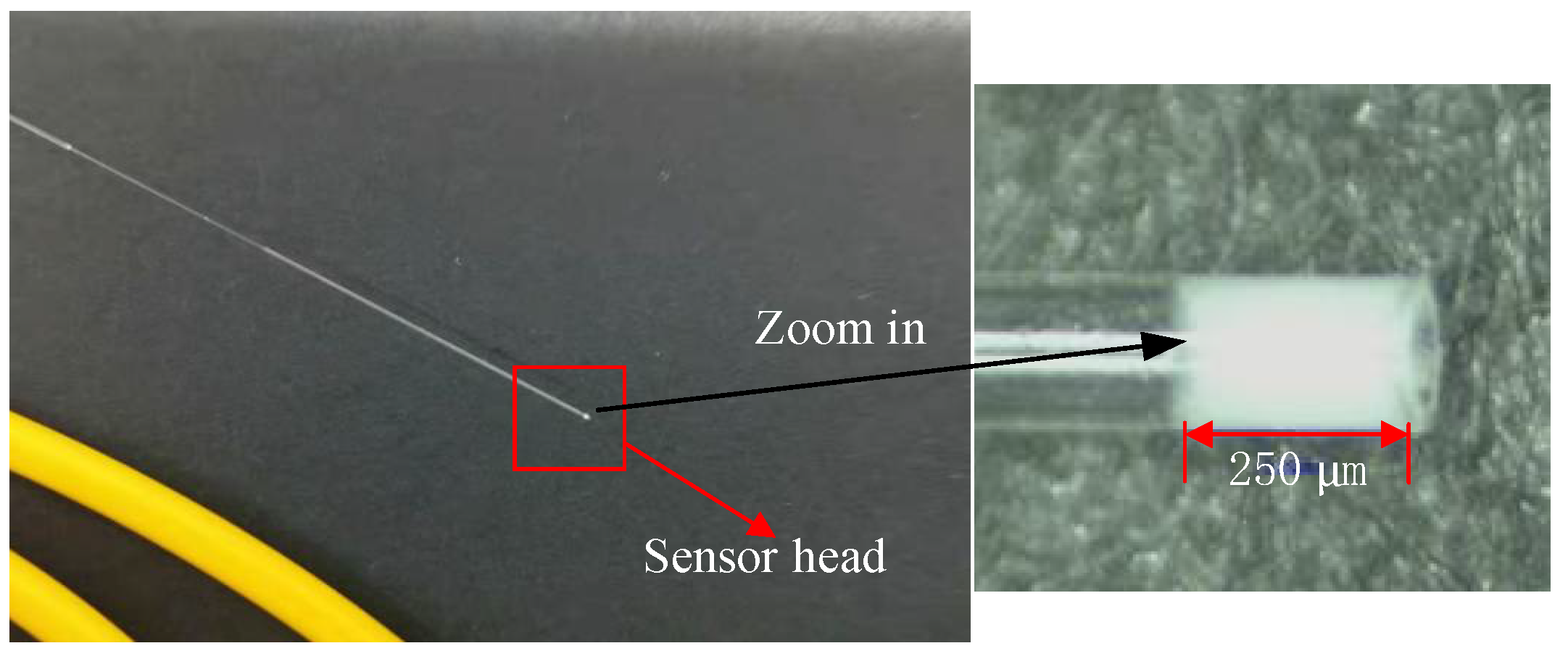
4. Sensor Fabrication
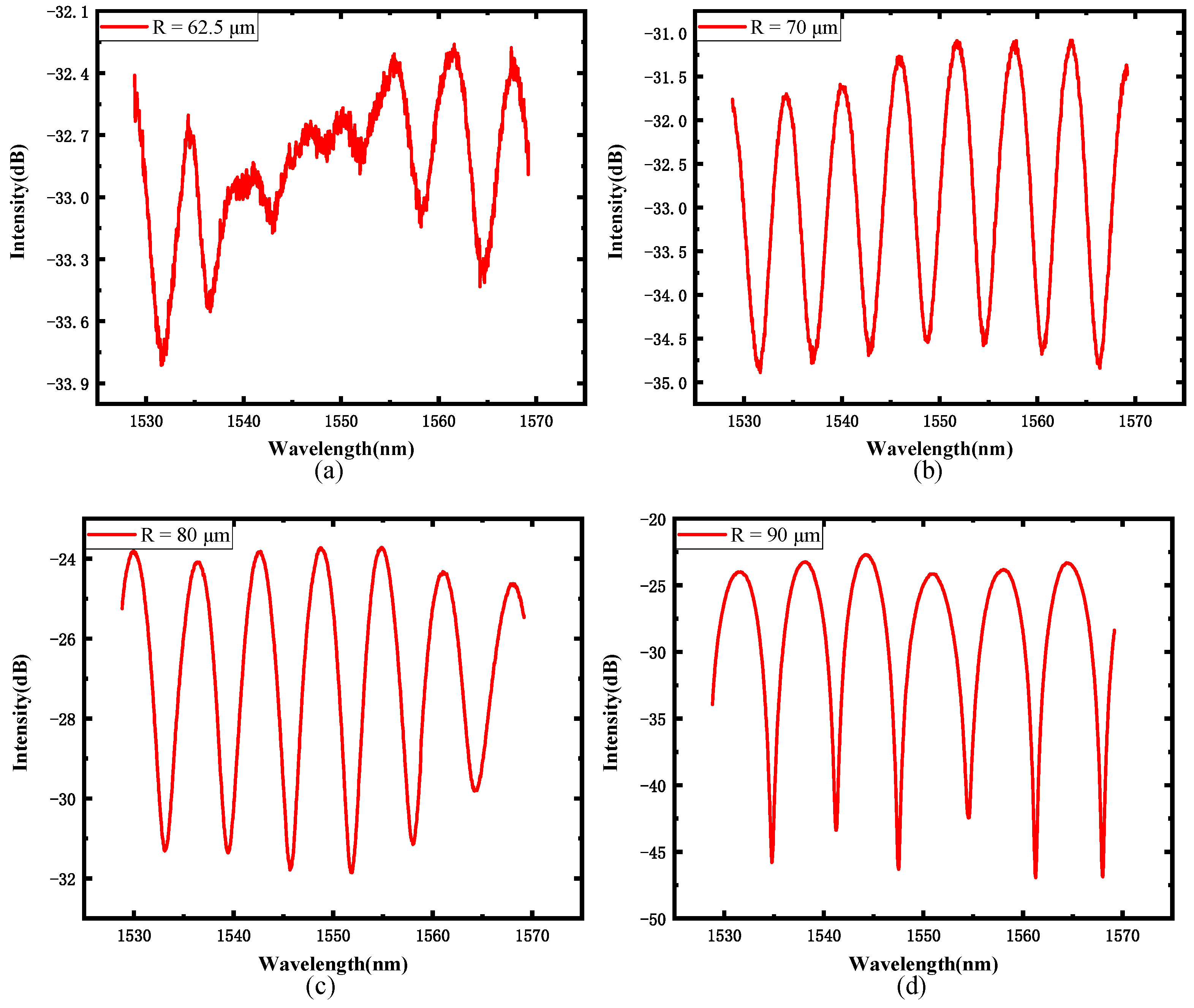
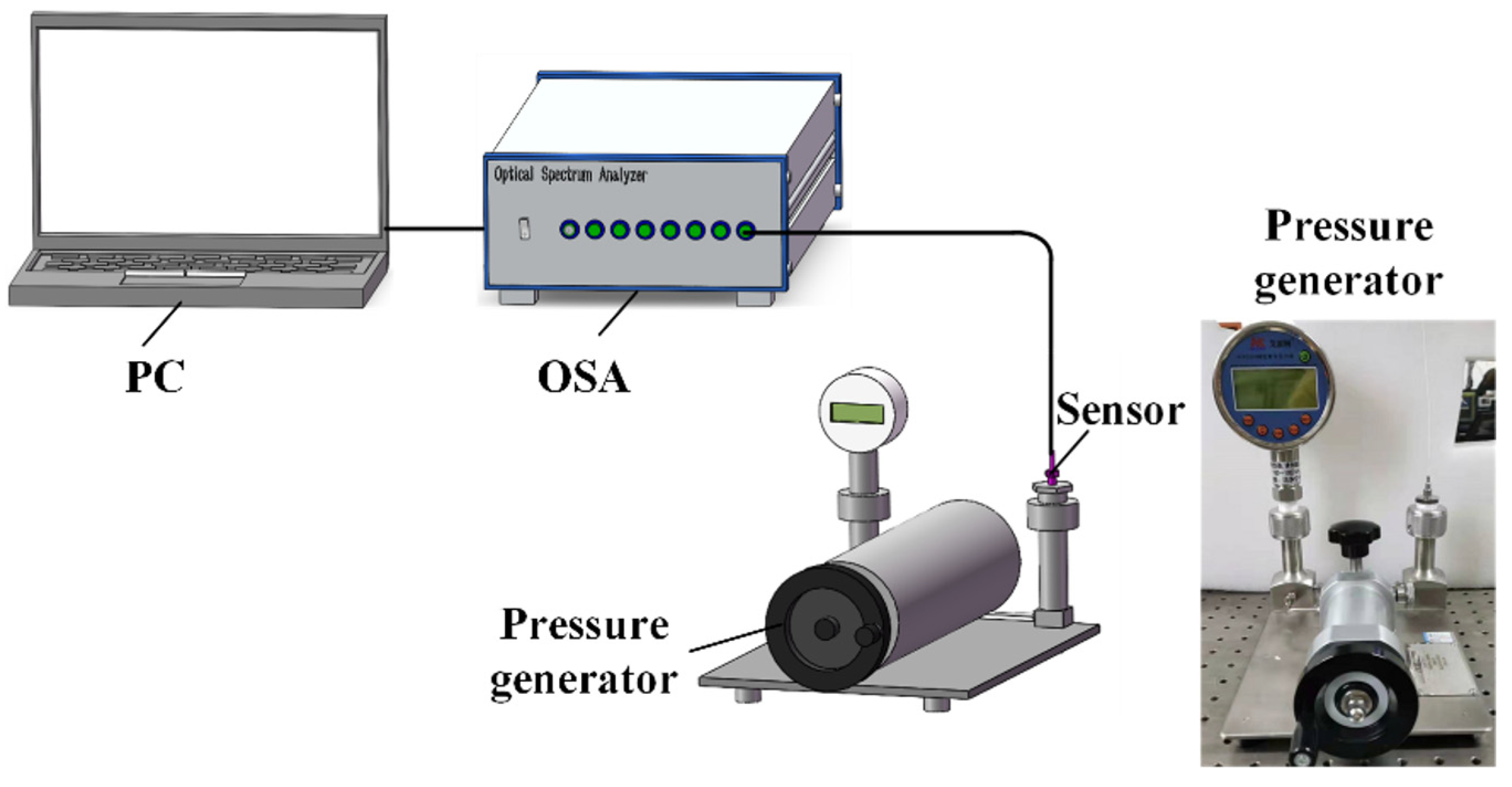
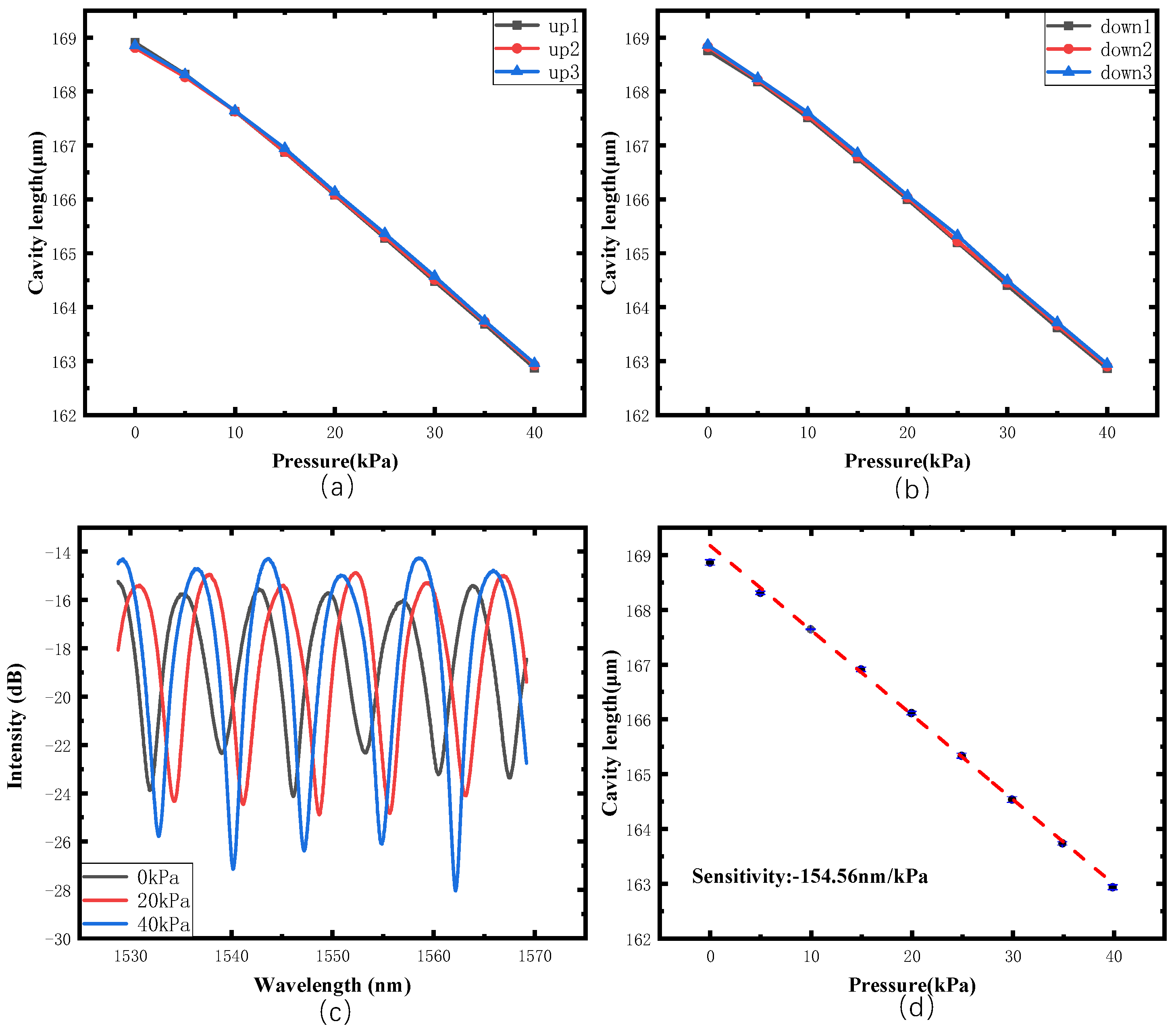
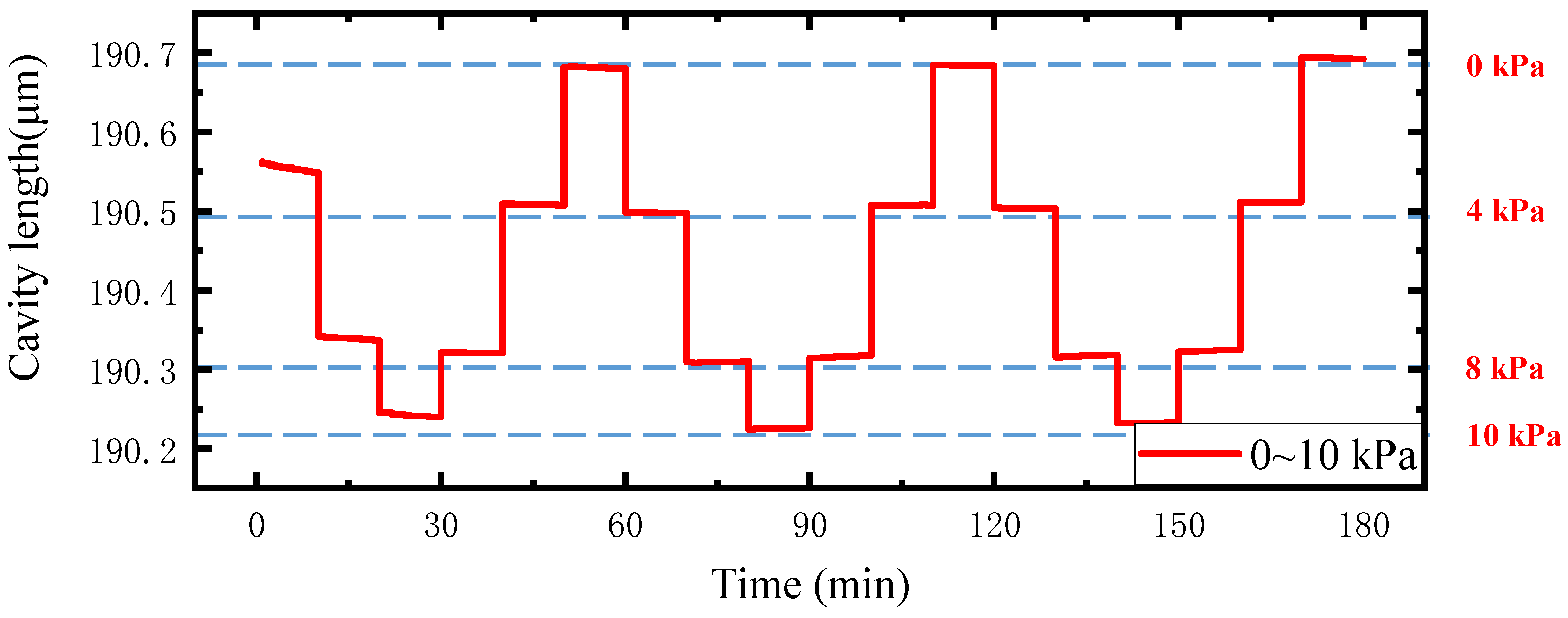
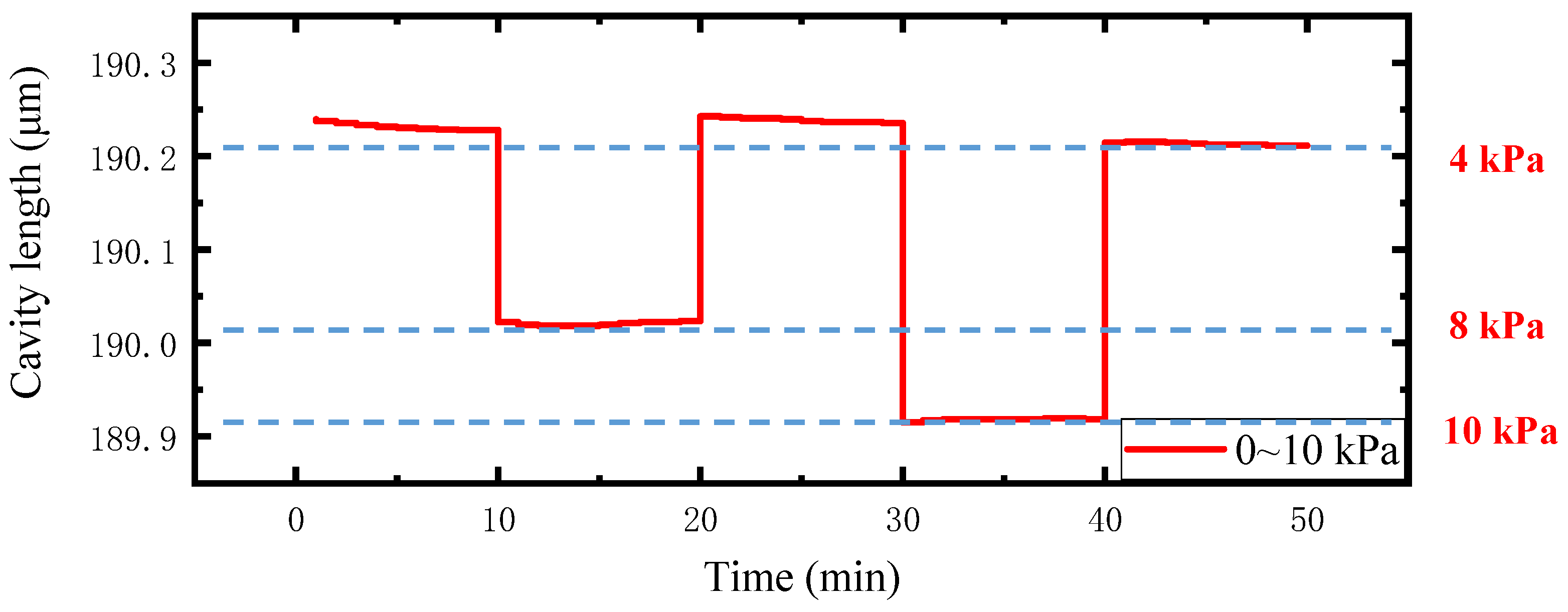
5. Experiments and Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, W.C.; Yuan, Y.G.; Yang, J.; Yuan, L.B. In-fiber integrated high sensitivity temperature sensor based on long Fabry-Perot resonator. Opt. Express 2019, 27, 14675–14683. [Google Scholar] [CrossRef] [PubMed]
- Monteiro, C.S.; Ferreira, M.S.; Silva, S.O.; Kobelke, J.; Schuster, K.; Bierlich, J.; Frazao, O. Fiber Fabry-Perot Interferometer for Curvature Sensing. Photonic Sens. 2016, 6, 339–344. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wang, K.N.; Chen, H.B.; Chen, Q.Q.; Wang, W. Non-Scanning Correlation Demodulation System for Compound Optical Fiber Fabry-Perot Sensors. Laser Optoelectron. Prog. 2019, 56, 130603. [Google Scholar] [CrossRef]
- Chen, H.B.; Zhang, Y.; Li, Y.; Jing, X.; Yuan, S.Z.; Zhang, X.X.; Wang, W.; Liu, R.; Guo, Q.M. Squared peak-to-peak algorithm for the spectral interrogation of short-cavity fiber-optic Fabry-Perot sensors. Appl. Opt. 2020, 59, 1198–1205. [Google Scholar] [CrossRef]
- Poeggel, S.; Tosi, D.; Duraibabu, D.; Leen, G.; McGrath, D.; Lewis, E. Optical Fibre Pressure Sensors in Medical Applications. Sensors 2015, 15, 17115–17148. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Marques, C. Diaphragm-Embedded Optical Fiber Sensors: A Review and Tutorial. IEEE Sens. J. 2021, 21, 12719–12733. [Google Scholar] [CrossRef]
- Correia, R.; James, S.; Lee, S.W.; Morgan, S.P.; Korposh, S. Biomedical application of optical fibre sensors. J. Opt. 2018, 20, 073003–073027. [Google Scholar] [CrossRef]
- Song, P.; Ma, Z.; Ma, J.; Yang, L.; Wei, J.; Zhao, Y.; Zhang, M.; Yang, F.; Wang, X. Recent Progress of Miniature MEMS Pressure Sensors. Micromachines 2020, 11, 56. [Google Scholar] [CrossRef] [Green Version]
- Zhou, W.; Hou, W.; Zhang, H. Development and Application of Fiber-optic Pressure Sensor in Medical Field. Zhongguo Yi Liao Qi Xie Za Zhi Chin. J. Med. Instrum. 2018, 42, 354–356. [Google Scholar]
- Liu, S.; Wang, Y.; Liao, C.; Wang, Y.; He, J.; Fu, C.; Yang, K.; Bai, Z.; Zhang, F. Nano silica diaphragm in-fiber cavity for gas pressure measurement. Sci. Rep. 2017, 7, 787–795. [Google Scholar] [CrossRef]
- Guo, X.; Zhou, J.; Du, C.; Wang, X. Highly Sensitive Miniature All-Silica Fiber Tip Fabry–Perot Pressure Sensor. IEEE Photonics Technol. Lett. 2019, 31, 689–692. [Google Scholar] [CrossRef]
- Ma, J.; Jin, W.; Ho, H.L.; Dai, J.Y. High-sensitivity fiber-tip pressure sensor with graphene diaphragm. Opt. Lett. 2012, 37, 2493–2495. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, B.; Wang, Y.; Mao, C. Temperature-Independent Gas Pressure Sensor with High Birefringence Photonic Crystal Fiber-Based Reflective Lyot Filter. Sensors 2019, 19, 5312. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.T.; In-Gyoo, K. Flexible and Wearable Pressure Sensor for Biomedical Applications. J. Korean Inst. Commun. Inf. Sci. 2018, 43, 1694–1702. [Google Scholar]
- Sikarwar, S.; Singh, S.S.; Yadav, B.C. Review on Pressure Sensors for Structural Health Monitoring. Photonic Sens. 2017, 7, 294–304. [Google Scholar] [CrossRef]
- Leal, A.L.; Damasceno, C.A.; Soares, G.F.; Pinheiro, G.R.; Bezerra, L.D.; Prado, M.D.P.; Perci, Y.M.; Neto, M.L.D. Low cost volume sensors for mechanical ventilators. IEEE Lat. Am. Trans. 2021, 19, 1083–1089. [Google Scholar]
- Farooq, M.; Iqbal, T.; Vazquez, P.; Farid, N.; Thampi, S.; Wijns, W.; Shahzad, A. Thin-Film Flexible Wireless Pressure Sensor for Continuous Pressure Monitoring in Medical Applications. Sensors 2020, 20, 6653. [Google Scholar] [CrossRef]
- Wu, J.; Yao, M.; Xiong, F.; Zhang, A.P.; Tam, H.-Y.; Wai, P.K.A. Optical Fiber-Tip Fabry–Pérot Interferometric Pressure Sensor Based on an In Situ μ-Printed Air Cavity. J. Lightwave Technol. 2018, 36, 3618–3623. [Google Scholar] [CrossRef]
- Luo, C.; Liu, X.; Liu, J.; Shen, J.; Li, H.; Zhang, S.; Hu, J.; Zhang, Q.; Wang, G.; Huang, M. An Optimized PDMS Thin Film Immersed Fabry-Perot Fiber Optic Pressure Sensor for Sensitivity Enhancement. Coatings 2019, 9, 290. [Google Scholar] [CrossRef] [Green Version]
- Cheng, X.; Dash, J.N.; Gunawardena, D.S.; Htein, L.; Tam, H.Y. Silicone Rubber Based Highly Sensitive Fiber-Optic Fabry-Perot Interferometric Gas Pressure Sensor. Sensors 2020, 20, 4927. [Google Scholar] [CrossRef]
- Wang, Q.H.; Liu, X.; Wang, D.N. Ultra-sensitive gas pressure sensor based on vernier effect with controllable amplification factor. Opt. Fiber Technol. 2021, 61, 102404–102408. [Google Scholar] [CrossRef]
- Wu, N.; Tian, Y.; Zou, X.; Zhai, Y.; Barringhaus, K.; Wang, X. A miniature fiber optic blood pressure sensor and its application in in vivo blood pressure measurements of a swine model. Sens. Actuators B Chem. 2013, 181, 172–178. [Google Scholar] [CrossRef]
- Zhao, Y.; Chen, M.-q.; Xia, F.; Lv, R.-Q. Small in-fiber Fabry-Perot low-frequency acoustic pressure sensor with PDMS diaphragm embedded in hollow-core fiber. Sens. Actuators A Phys. 2018, 270, 162–169. [Google Scholar] [CrossRef]
- Liang, H.; Jia, P.G.; Liu, J.; Fang, G.C.; Li, Z.; Hong, Y.P.; Liang, T.; Xiong, J.J. Diaphragm-Free Fiber-Optic Fabry-Perot Interferometric Gas Pressure Sensor for High Temperature Application. Sensors 2018, 18, 1011. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Dai, Y.T.; Zhang, D.S.; Wen, X.Y.; Yang, M.H. Cascaded-Cavity Fabry-Perot Interferometric Gas Pressure Sensor based on Vernier Effect. Sensors 2018, 18, 3677. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lei, X.H.; Xie, L.; Qi, L.S.; Chen, W.M. Coupling efficiency of light intensity from the blackbody cavity into a cone-shaped optical fiber. Appl. Opt. 2019, 58, 1707–1714. [Google Scholar] [CrossRef]
- Lee, Y.G.; Park, C.H.; Back, S.W.; Kim, H.J.; Lee, S.S. Alignment tolerant expanded beam connector based on a gapless fiber-lens interface. Appl. Opt. 2016, 55, 341–344. [Google Scholar] [CrossRef]
- Song, C.X.; Lei, X.H.; Xie, L.; Liu, X.M.; Chen, W.M. Coupling Efficiency of Light Intensity from Blackbody Cavity into Spherical Optical Fiber. Acta Photonica Sin. 2020, 49, 0906001. [Google Scholar] [CrossRef]
- Hao, W.L.; Zeng, H.H.; Chen, X.Q.; He, W.; Zhou, R.; Li, J.H.; Zhang, H.X. Insights into the reinforcement and mechanism of silicone mold rubber co-modified with WCB and MMQ resin. Mater. Res. Express 2021, 8, 035201. [Google Scholar] [CrossRef]
- Marckmann, G.; Verron, E. Comparison of Hyperelastic Models for Rubber-Like Materials. Rubber Chem. Technol. 2006, 79, 835–858. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Wang, Q.C.; Wang, G.Q. Determination of Material Constants in Rubber Mooney Rivlin Model. China Rubber Ind. 2011, 58, 241–245. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Ratio (M) | C10 | C01 |
|---|---|---|
| 6:1 | 0.18419 | −0.12967 |
| 8:1 | 0.28905 | −0.14036 |
| 10:1 | 0.42135 | −0.15127 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Lei, X.; Chen, Y.; Lv, S.; Liu, X.; Zhang, P. Silicone Rubber Fabry-Perot Pressure Sensor Based on a Spherical Optical Fiber End Face. Sensors 2022, 22, 1862. https://doi.org/10.3390/s22051862
Jiang C, Lei X, Chen Y, Lv S, Liu X, Zhang P. Silicone Rubber Fabry-Perot Pressure Sensor Based on a Spherical Optical Fiber End Face. Sensors. 2022; 22(5):1862. https://doi.org/10.3390/s22051862
Chicago/Turabian StyleJiang, Changxing, Xiaohua Lei, Yuru Chen, Shaojie Lv, Xianming Liu, and Peng Zhang. 2022. "Silicone Rubber Fabry-Perot Pressure Sensor Based on a Spherical Optical Fiber End Face" Sensors 22, no. 5: 1862. https://doi.org/10.3390/s22051862