
Three-Dimensional Measuring Device and Method of Underground Displacement Based on Double Mutual Inductance Voltage Contour Method

Abstract
:1. Introduction
2. Structural Design and Working Principle
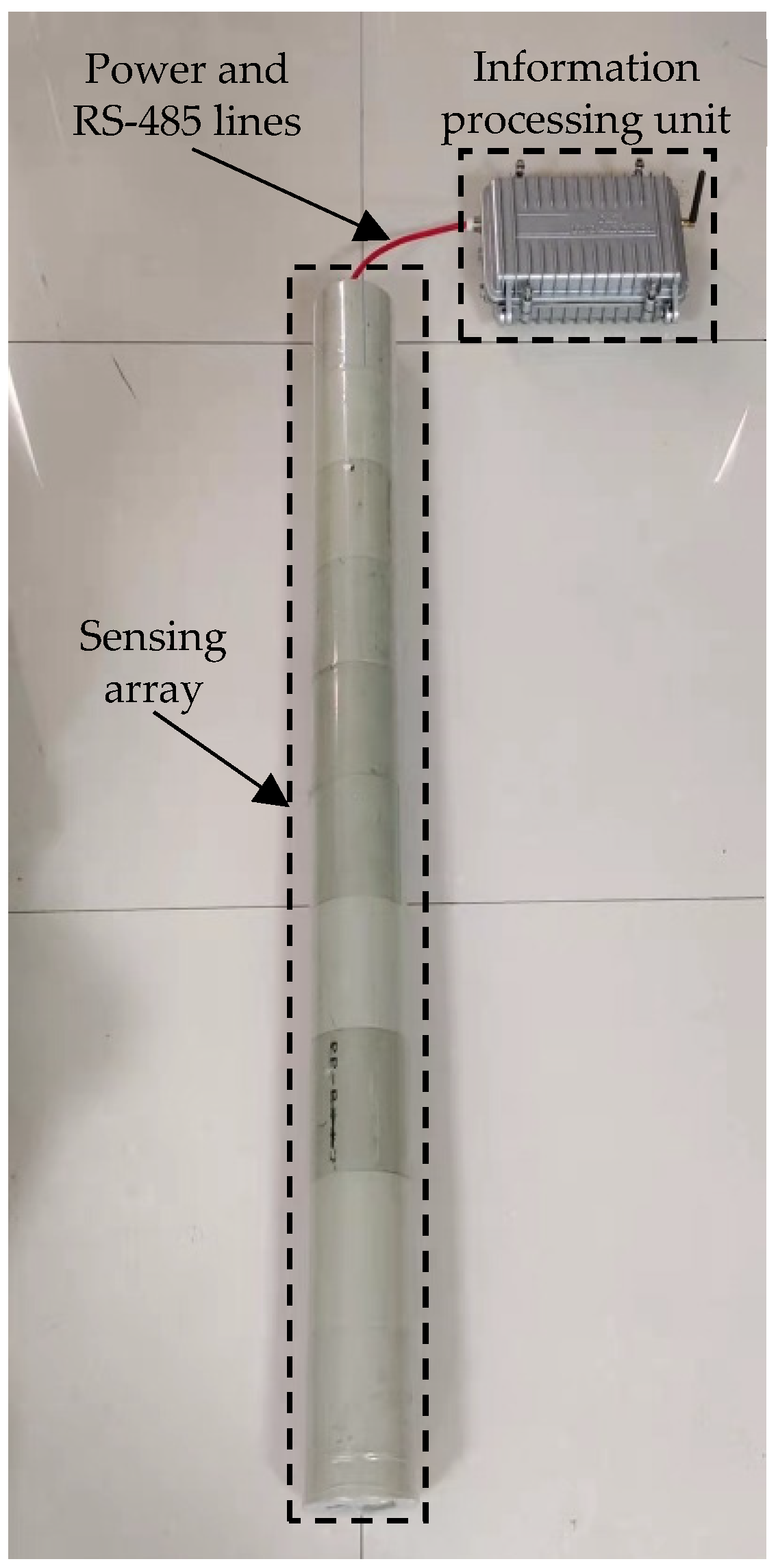
2.1. System Structure Design
2.2. Working Principle
2.3. Measurement Principle
2.3.1. Measurement Principle of Displacement
2.3.2. Measurement Principle of Azimuth and Tilt Angle
3. Data Acquisition and Processing
3.1. Construction of Experimental Platform
3.2. Double Mutual Inductance Voltage Contour
4. Establishment of Underground Displacement Three-Dimensional Measurement Model
- The data acquisition experiment is carried out on the experimental platform to obtain the double mutual inductance voltage datasets at different inter-axis angles and the double mutual inductance voltages, inter-axis angle and azimuth in the measuring unit are measured under the control of the information processing unit.
- Applying the interpolation theory, the dataset of double mutual inductance voltages at the current inter-axis angle between two adjacent sensing units at the current moment is obtained, and the equivalent discrete points of double mutual inductance voltages are solved according to the values of double mutual inductance voltages.
- Applying the equivalent discrete points of double mutual inductance voltages to construct two contours of double mutual inductance voltages. These two contours have only one intersection. The intersection coordinates, corresponding to the horizontal displacement and vertical displacement between these two adjacent sensing units, can be solved by numerical analysis method.
4.1. Establishment of Double Mutual Inductance Voltage Datasets
- Data acquisition experiment for measuring units at different inter-axis angles is carried out to obtain the corresponded datasets of double mutual inductance voltages. Since increasing the number of datasets can also improve the accuracy of the linear interpolation method, so on the premise of not exceeding the memory size of the information processing unit, the variation range of the inter-axis angle in the data acquisition experiment sets as 0° to 80° and the variation spacing sets as 5°.
- Under the control of the information processing unit, the tilt angles of both the excitation end and the measurement end in each measuring unit are first solved through the attitude angle solving formula, and then converted into the inter-axis angle for this measuring unit. Find two datasets adjacent to this inter-axis angle, then calculate the double mutual inductance voltage datasets under the current inter-axis angle through the following formula:
4.2. Calculation of Double Mutual Inductance Voltage Equivalent Discrete Points
4.3. Displacement Solving
5. Results and Discussion
6. Conclusions
- Flexible structure design. One characteristic of our proposed underground displacement three-dimensional measurement device is that it has a flexible sensing array structure composed of multiple sensing units in series. Compared with the rigid structure of inclinometer pipe [21], the flexible structure has better coupling with landslide displacement, higher displacement sensitivity. It can reflect the landslide change in real-time to play a better early warning and prediction function.
- Automatic measurement. When the system works, under the control of the information processing unit, it can measure the horizontal displacement, vertical displacement, inter-axis angle, and azimuth between any two adjacent sensing units from bottom to top to realize the distributed three-dimensional measurement of underground displacement of rock and soil mass from deep underground to surface.
- Three-dimensional measurement. Borehole inclinometer [21,22], TDR [23,24], and fiber optic sensing technology [25] cannot achieve three-dimensional measurement of underground displacement. The system adopts the principle of electromagnetic mutual inductance to realize three-dimensional measurement. It has stronger stability and a wider effective measurement range compared with the measurement principle of the above underground displacement monitoring technology. Through theoretical analysis and experimental verification, it is found that the horizontal displacement and vertical displacement between adjacent sensing units cannot be accurately determined by only one mutual inductance voltage. Therefore, the double mutual inductance contour method is proposed in this paper. Each sensing unit includes an air-core, a magnetic core coil, and an attitude detecting module. The position information of adjacent sensing units can be characterized by the double mutual inductance voltages and inter-axis angles.
- High measurement accuracy. Several data acquisition experiments of type I and type II mutual inductance voltages under different inter-axis angles between adjacent sensing units are conducted, where the relationship between the measured mutual inductance voltages of type I and type II. The relative measuring displacement between any two adjacent sensing units under different inter-axis angles is investigated. A new three-dimensional measurement model of underground displacement is proposed based on the principle of interval-interpolation and contour-modeling. Through this method, the double mutual inductance voltage and the Euler angle of three axes measured at any time and position can be transformed into the horizontal displacement, vertical displacement, inter-axis angle and azimuth between any two adjacent sensing units. To fully evaluate the effectiveness and accuracy of the measurement model, a series of comparative experiments between the measured displacement and the actual displacement have been conducted on the self-designed underground displacement three-dimensional measurement experimental device. The experimental results show that the maximum errors of horizontal displacement and vertical displacement based on the proposed measurement model are less than 1 mm in the inter-axis angle range from 0° to 80°, which has higher measurement accuracy and reliability compared with other underground displacement monitoring technologies [4,20] and meets the accuracy and reliability requirements of landslide displacement monitoring.
Author Contributions
Funding
Conflicts of Interest
References
- Wu, Y.; Niu, R.; Wang, Y.; Chen, T. A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China. Sensors 2020, 20, 6619. [Google Scholar] [CrossRef] [PubMed]
- Biagi, L.; Grec, F.C.; Negretti, M. Low-Cost GNSS Receivers for Local Monitoring: Experimental Simulation, and Analysis of Displacements. Sensors 2016, 16, 2140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, J.; Liu, X.; Niu, X.; Wang, Y.; Wen, T.; Zhang, J.; Zou, Z. Forecasting of Landslide Displacement Using a Probability-Scheme Combination Ensemble Prediction Technique. Int. J. Environ. Res. Public Health 2020, 17, 4788. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, S.; Chen, J.; Teng, P.; Wei, F.; Chen, Q. A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides. Sensors 2017, 17, 2486. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Tang, H.; Wen, T.; Ma, J. Direct Interval Prediction of Landslide Displacements Using Least Squares Support Vector Machines. Complexity 2020, 2020, 7082594. [Google Scholar] [CrossRef]
- Ma, J.; Niu, X.; Tang, H.; Wang, Y.; Wen, T.; Zhang, J. Displacement Prediction of a Complex Landslide in the Three Gorges Reservoir Area (China) Using a Hybrid Computational Intelligence Approach. Complexity 2020, 2020, 2624547. [Google Scholar] [CrossRef]
- Ma, J.W.; Tang, H.M.; Liu, X.; Wen, T.; Zhang, J.R.; Tan, Q.W.; Fan, Z.Q. Probabilistic forecasting of landslide displacement accounting for epistemic uncertainty: A case study in the Three Gorges Reservoir area, China. Landslides 2017, 14, 1275–1281. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Sun, Y.; Gao, L.; Zhang, Z.; Zhang, W.; Zhao, P.; Yue, Y. Using Custom Fiber Bragg Grating-Based Sensors to Monitor Artificial Landslides. Sensors 2016, 16, 1417. [Google Scholar] [CrossRef]
- Squarzoni, C.; Delacourt, C.; Allemand, P. Differential single-frequency GPS monitoring of the La Valette landslide (French Alps). Eng. Geol. 2005, 79, 215–229. [Google Scholar] [CrossRef]
- Schlögel, R.; Doubre, C.; Malet, J.-P.; Masson, F. Landslide deformation monitoring with ALOS/PALSAR imagery: A D-InSAR geomorphological interpretation method. Geomorphology 2015, 231, 314–330. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Corsini, A.; Bonacini, F.; Mulas, M.; Petitta, M.; Ronchetti, F.; Truffelli, G. Long-Term Continuous Monitoring of a Deep-Seated Compound Rock Slide in the Northern Apennines (Italy). In Engineering Geology for Society and Territory; Springer: Berlin/Heidelberg, Germany, 2015; Volume 2, pp. 1337–1340. [Google Scholar]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Manconi, A. Surface displacements following the Mw 6.3 L’Aquila earthquake: One year of continuous monitoring via Robotized Total Station. Ital. J. Geosci. 2012, 131, 403–409. [Google Scholar]
- Karimzadeh, S.; Matsuoka, M. Ground Displacement in East Azerbaijan Province, Iran, Revealed by L-band and C-band InSAR Analyses. Sensors 2020, 20, 6913. [Google Scholar] [CrossRef]
- Notti, D.; Cina, A.; Manzino, A.; Colombo, A.; Bendea, I.H.; Mollo, P.; Giordan, D. Low-Cost GNSS Solution for Continuous Monitoring of Slope Instabilities Applied to Madonna Del Sasso Sanctuary (NW Italy). Sensors 2020, 20, 289. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Caviedes-Voullième, D.; Juez, C.; Murillo, J.; García-Navarro, P. 2D dry granular free-surface flow over complex topography with obstacles. Part I: Experimental study using a consumer-grade RGB-D sensor. Comput. Geosci. 2014, 73, 177–197. [Google Scholar] [CrossRef]
- Juez, C.; Caviedes-Voullième, D.; Murillo, J.; García-Navarro, P. 2D dry granular free-surface transient flow over complex topography with obstacles. Part II: Numerical predictions of fluid structures and benchmarking. Comput. Geosci. 2014, 73, 142–163. [Google Scholar] [CrossRef]
- Nichols, A.; Rubinato, M. Low-cost 3D mapping of turbulent flow surfaces. In Sustainable Hydraulics in the Era of Global Change; Routledge: London, UK, 2016; pp. 186–192. [Google Scholar]
- Zhang, Y.; Tang, H.; Lu, G.; Wang, Y.; Li, C.; Zhang, J.; An, P.; Shen, P. Design and Testing of Inertial System for Landslide Displacement Distribution Measurement. Sensors 2020, 20, 7154. [Google Scholar] [CrossRef]
- Simeoni, L.; Mongiovì, L. Inclinometer monitoring of the Castelrotto landslide in Italy. J. Geotech. Geoenviron. Eng. 2007, 133, 653–666. [Google Scholar] [CrossRef]
- Zhang, Y.; Tang, H.; Li, C.; Lu, G.; Cai, Y.; Zhang, J.; Tan, F. Design and Testing of a Flexible Inclinometer Probe for Model Tests of Landslide Deep Displacement Measurement. Sensors 2018, 18, 224. [Google Scholar] [CrossRef] [Green Version]
- Stangl, R.; Buchan, G.; Loiskandl, W. Field use and calibration of a TDR-based probe for monitoring water content in a high-clay landslide soil in Austria. Geoderma 2009, 150, 23–31. [Google Scholar] [CrossRef]
- Su, M.-B.; Chen, I.-H.; Liao, C.-H. Using TDR cables and GPS for landslide monitoring in high mountain area. J. Geotech. Geoenviron. Eng. 2009, 135, 1113–1121. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.H.; Shi, B.; Zhang, C.C. FBG-Based Monitoring of Geohazards: Current Status and Trends. Sensors 2017, 17, 452. [Google Scholar] [CrossRef] [PubMed]
- Fosalau, C.; Zet, C.; Petrisor, D. Multiaxis Inclinometer for in Depth Measurement of Landslide Movements. Sens. Rev. 2015, 35, 296–302. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors 2020, 20, 3318. [Google Scholar] [CrossRef]
- Chung, C.-C.; Lin, C.-P. A comprehensive framework of TDR landslide monitoring and early warning substantiated by field examples. Eng. Geol. 2019, 262, 105330. [Google Scholar] [CrossRef]
- Picarelli, L.; Damiano, E.; Greco, R.; Minardo, A.; Olivares, L.; Zeni, L. Performance of Slope Behavior Indicators in Unsaturated Pyroclastic Soils. J. Mt. Sci. 2015, 12, 1434–1447. [Google Scholar] [CrossRef]
- Marjanović, M.; Caha, J.; Miřijovský, J. Proposition of a Landslide Monitoring System in Czech Carpathians. In Engineering Geology for Society and Territory; Springer: Berlin/Heidelberg, Germany, 2015; Volume 2, pp. 139–142. [Google Scholar]
- Barrias, A.; Casas, J.R.; Villalba, S. A review of distributed optical fiber sensors for civil engineering applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Cheng, W.; Chen, J.; Xie, R.; Li, X. A High Performance Piezoelectric Sensor for Dynamic Force Monitoring of Landslide. Sensors 2017, 17, 394. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.J.; Jiang, C. An experimental study: Integration device of fiber bragg grating and reinforced concrete beam for measuring debris flow impact force. J. Mt. Sci. 2017, 14, 1526–1536. [Google Scholar] [CrossRef]
- Yeo, T.L.; Sun, T.; Grattan, K.T.V. Fibre-optic sensor technologies for humidity and moisture measurement. Sens. Actuators A Phys. 2008, 144, 280–295. [Google Scholar] [CrossRef]
- Alwis, L.; Sun, T.; Grattan, K.T.V. Optical fibre-based sensor technology for humidity and moisture measurement: Review of recent progress. Measurement 2013, 46, 4052–4074. [Google Scholar] [CrossRef]
- Pei, H.F.; Li, C.; Zhu, H.H.; Wang, Y.J. Slope stability analysis based on measured strains along soil nails using FBG sensing technology. Math. Probl. Eng. 2013, 2013, 561360. [Google Scholar]
- Zhu, H.H.; Shi, B.; Yan, J.F.; Zhang, J.; Wang, J. Investigation of the evolutionary process of a reinforced model slope using a fiber-optic monitoring network. Eng. Geol. 2015, 186, 34–43. [Google Scholar] [CrossRef]
- Su, Y.J.; Xu, H.Z.; Gu, P.; Hu, W.J. Application of FBG sensing technology in stability analysis of geogrid-reinforced slope. Sensors 2017, 17, 597. [Google Scholar]
- Xu, H.; Zheng, X.; Zhao, W.; Sun, X.; Li, F.; Du, Y.; Liu, B.; Gao, Y. High Precision, Small Size and Flexible FBG Strain Sensor for Slope Model Monitoring. Sensors 2019, 19, 2716. [Google Scholar] [CrossRef] [Green Version]
- Gage, J.R.; Fratta, D.; Turner, A.L.; MacLaughlin, M.M.; Wang, H.F. Validation and implementation of a new method for monitoring in situ strain and temperature in rock masses using fiber-optically instrumented rock strain and temperature strips. Int. J. Rock Mech. Min. Sci. 2013, 61, 244–255. [Google Scholar] [CrossRef]
- Sun, A.; Semenova, Y.; Farrell, G.; Chen, B.; Li, G.; Lin, Z. BOTDR integrated with FBG sensor array for distributed strain measurement. Electron. Lett. 2010, 46, 66–68. [Google Scholar] [CrossRef]
- Huntley, D.; Bobrowsky, P.; Qing, Z.; Sladen, W.; Bunce, C.; Edwards, T.; Hendry, M.; Martin, D.; Choi, E. Fiber Optic Strain Monitoring and Evaluation of a Slow-Moving Landslide Near Ashcroft, British Columbia, Canada. In Landslide Science for a Safer Geoenvironment; Springer: Berlin/Heidelberg, Germany, 2014; pp. 415–421. [Google Scholar]
- Arslan, A.; Kelam, M.A.; Eker, A.M.; Akgün, H.; Koçkar, M.K. Optical Fiber Technology to Monitor Slope Movement. In Engineering Geology for Society and Territory; Springer: Berlin/Heidelberg, Germany, 2015; Volume 2, pp. 1425–1429. [Google Scholar]
- Dost, B.; Gronz, O.; Casper, M.; Krein, A. The Potential of Smartstone Probes in Landslide Experiments: How to Read Motion Data. Nat. Hazards Earth Syst. Sci. Discuss. 2020, 20, 3501–3519. [Google Scholar] [CrossRef]
- Dai, F.C.; Lee, C.F. Terrain-based mapping of landslide susceptibility using a geographical information system: A case study. Can. Geotech. J. 2001, 38, 911–923. [Google Scholar] [CrossRef]
- Dai, F.C.; Lee, C.F. Landslide characteristics and slope instability modeling using GIS, Lantau Island, Hong Kong. Geomorphology 2002, 42, 213–228. [Google Scholar] [CrossRef]
- Ayalew, L.; Yamagishi, H.; Ugawa, N. Landslide susceptibility mapping using GIS-based weighted linear combination, the case in Tsugawa area of Agano River, Niigata Prefecture, Japan. Landslides 2004, 1, 73–81. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equivalent Discrete Point of Type I Mutual Inductance Voltage | Equivalent Discrete Point of Type II Mutual Inductance Voltage |
|---|---|
| [37.074, 0.000] [36.160, 1.000] [35.160, 2.000] [34.153, 3.000] [33.087, 4.000] [31.909, 5.000] [30.714, 6.000] [29.429, 7.000] [28.105, 8.000] [26.650, 9.000] [25.111, 10.000] [23.412, 11.000] [21.600, 12.000] [19.571, 13.000] [17.385, 14.000] [14.909, 15.000] [12.000, 16.000] [8.428, 17.000] | [31.684, 0.000] [31.000, 1.000] [30.211, 2.000] [29.444 3.000] [28.611, 4.000] [27.667, 5.000] [26.765, 6.000] [25.800, 7.000] [24.733, 8.000] [23.642, 9.000] [22.385, 10.000] [21.083, 11.000] [19.750, 12.000] [18.250, 13.000] [16.636, 14.000] [14.900, 15.000] [12.889, 16.000] [10.750, 17.000] [8.143, 18.000] [5.167, 19.000] [1.000, 20.000] |
| Actual Displacement | Measured Displacement | ||
|---|---|---|---|
| Lagrange Interpolation | Least-Squares Fitting | Interval Linear | |
| [5, 5] | [4.882, 4.983] | [4.883, 4.982] | [4.902, 4.969] |
| [10, 10] | [9.964, 9.936] | [9.961, 9.935] | [9.976, 9.919] |
| [15, 15] | [14.879, 15.011] | [14.853, 15.024] | [14.923, 14.915] |
| [20, 20] | [19.817, 20.036] | [19.811, 20.041] | [19.837, 20.029] |
| [25, 25] | [25.023, 24.887] | [25.044, 24.877] | [25.019, 24.883] |
| [30, 30] | [30.221, 29.935] | [30.203, 29.947] | [30.034, 30.026] |
| [35, 35] | [34.640, 35.300] | [34.619, 35.320] | [34.919, 35.067] |
| [40, 40] | [39.558, 40.424] | [39.565, 40.421] | [39.957, 40.130] |
| [45, 45] | [44.500, 45.499] | [44.570, 45.448] | [44.561, 45.439] |
| Max Error | [−0.500, +0.499] | [−0.435, +0.448] | [−0.439, +0.439] |
| Relative Average Error | [−0.168, +0.112] | [−0.166, +0.111] | [−0.097, +0.042] |
| Variance | [0.048, 0.048] | [0.043, 0.044] | [0.018, 0.025] |
| Actual Displacement | Measured Displacement | ||
|---|---|---|---|
| θ = 18.35° | θ = 36.34° | θ = 62.82° | |
| [5, 5] | [5.07, 4.47] | [5.01, 4.87] | [5.07, 5.18] |
| [10, 10] | [9.93, 9.66] | [9.85, 9.92] | [10.30, 10.11] |
| [15, 15] | [14.85, 14.71] | [14.90, 14.96] | [15.33, 15.31] |
| [20, 20] | [19.85, 19.70] | [19.99, 20.01] | [20.30, 20.27] |
| [25, 25] | [24.79, 24.72] | [25.04, 25.06] | [25.30, 25.25] |
| [30, 30] | [29.72, 29.70] | [30.01, 29.74] | [30.51, 30.44] |
| [35, 35] | [34.85, 34.75] | [34.91, 34.88] | [35.20, 35.26] |
| [40, 40] | [39.97, 39.87] | [40.28, 39.79] | [40.60, 40.02] |
| [45, 45] | [44.65, 44.90] | [45.31, 44.78] | [45.59, 45.44] |
| Max Error | [−0.35, −0.53] | [+0.31, −0.26] | [+0.60, +0.44] |
| Relative Average Error | [−0.15, −0.28] | [+0.03, −0.11] | [+0.36, +0.25] |
| Variance | [0.014, 0.014] | [0.023, 0.01] | [0.028, 0.017] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shentu, N.; Wang, F.; Li, Q.; Qiu, G.; Tong, R.; An, S. Three-Dimensional Measuring Device and Method of Underground Displacement Based on Double Mutual Inductance Voltage Contour Method. Sensors 2022, 22, 1725. https://doi.org/10.3390/s22051725
Shentu N, Wang F, Li Q, Qiu G, Tong R, An S. Three-Dimensional Measuring Device and Method of Underground Displacement Based on Double Mutual Inductance Voltage Contour Method. Sensors. 2022; 22(5):1725. https://doi.org/10.3390/s22051725
Chicago/Turabian StyleShentu, Nanying, Feng Wang, Qing Li, Guohua Qiu, Renyuan Tong, and Siguang An. 2022. "Three-Dimensional Measuring Device and Method of Underground Displacement Based on Double Mutual Inductance Voltage Contour Method" Sensors 22, no. 5: 1725. https://doi.org/10.3390/s22051725