
Residual Interpolation Integrated Pixel-by-Pixel Adaptive Iterative Process for Division of Focal Plane Polarimeters

Abstract
:1. Introduction
- (1)
- Methods of independently interpolating using single-channel, which mainly include polynomial interpolation methods (bilinear [28,29,30,31], bicubic, bicubic spline [32,33], etc.) and edge directionality interpolation methods (gradient [34,35], smoothness [36], etc.). they are easy to implement, but their performance is mediocre.
- (2)
- Methods of interpolating using other channels as reference images, which mainly include correlation-based interpolation methods [37,38,39,40] and residual interpolation methods [41,42,43,44,45]. They are balanced in performance and stability and are the main topic of this paper. Recently, some heuristic algorithms (e.g., heuristic validation mechanisms) have been shown to find some important regions in traditional images [46], and they are expected to be combined with the residual interpolation algorithms to further improve interpolation performance.
- (3)
- Learning-based methods, which mainly include optimization-based methods [47], sparse representation-based methods [48], and deep learning-based methods [49,50,51]. They are considered to have the best performance on the published datasets, but their algorithm designs do not directly correspond to the DoFP polarimeter model, and the current open-access datasets contain very limited polarization scenarios.
- (1)
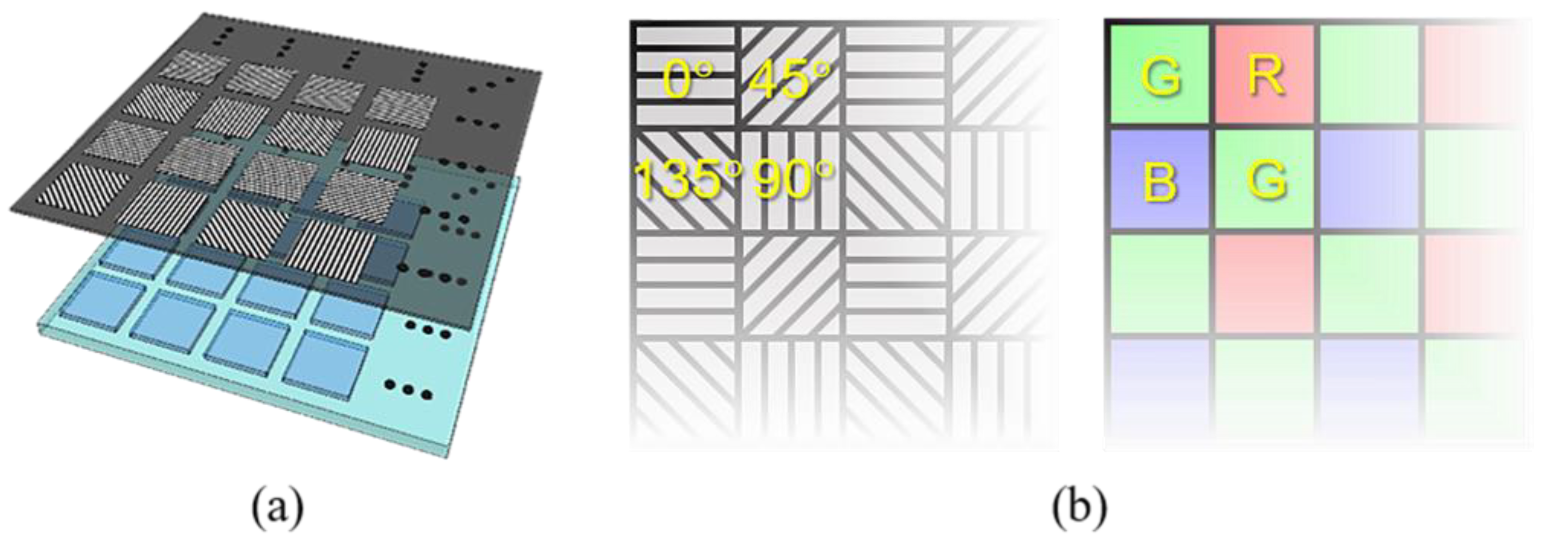
- The spatial layout of four channels in the pixeled polarizer array is not thoroughly considered when selecting the polarization direction of the guide image in PRI and MLPRI. In the color filter array, the sampling rate of G channel is 50%, which is twice that of the R and B channels (Figure 1b). Therefore, the G channel is usually interpolated first, and its interpolation result is also used as a reference image when interpolating the R and B channels, which makes the performance of residual interpolation methods better than the performance of traditional single-channel interpolation methods. In contrast, the sampling rates of the four channels in the pixeled polarizer array of DoFP polarimeters are equal, so there is no specific dominant direction. The existing PRI or MLPRI intuitively selects the same channel as the input image or the 0° channel as the guide image. The selected guide image does not have an advantage in terms of sampling rate, which makes the improvements in the performance of PRI and MLPRI insignificant compared with the single-channel interpolation methods.
- (2)
- The guide filter requires the guide image to have the same high resolution as the interpolation result. High-resolution images cannot be directly obtained during the actual polarization imaging process. Therefore, the guide image is usually generated by preprocessing the low-resolution observed image. Referring to color image demosaicing, PRI and MLPRI use basic interpolation methods, such as bilinear and bicubic interpolation, to up-sample the observed image and generate the guide image. However, when the sampling rate of the observed image is low, the guide image generated by this preprocessing may exhibit large errors in regions with an abundant edge and texture. This error will be transmitted to the tentatively estimated image, and further affect the quality of the output interpolation result.
- (1)
- We proposed a new guide-image selection strategy. We considered the spatial layout of the pixeled polarizer array, and chose different channels as the guide image for the pixels in different spatial positions. In addition, cooperating with the different sizes and directions of the filter window, the sampling rate of the adopted guide image in the filter window increased to 50%.
- (2)
- We designed a pixel-by-pixel adaptive iterative process based on residual interpolation. The guide image and the interpolation result were adaptively updated pixel-by-pixel through two interrelated iterative processes to improve the demosaicing performance of the output interpolation result.
- (3)
- We performed an adaptively weighted average fusion on the local iterative optimal results of the two guide filters, and minimized residual and minimized Laplacian energy, to make the interpolation results better.
- (4)
- Unlike the current mainstream learning-based methods, our algorithm is completely physical-fact-based and can explain the down-sampling process of the DoFP polarimeter. Furthermore, the focus on the improving imaging system makes our algorithm completely independent of the polarized images being processed, making it more robust to unseen scenes.
2. Related Works
2.1. Demosaicing Methods for DoFP Polarimeters
2.1.1. Methods of Interpolating Independently Using Single-Channel
2.1.2. Methods of Interpolating Using Other Channels as Reference Images
2.1.3. Learning-Based Methods
2.2. Basic Theory of Polarization Imaging
3. Discussion of the Guide Image
3.1. Framework of the Residual Interpolation Methods for DoFP Polarimeters Demosaicing
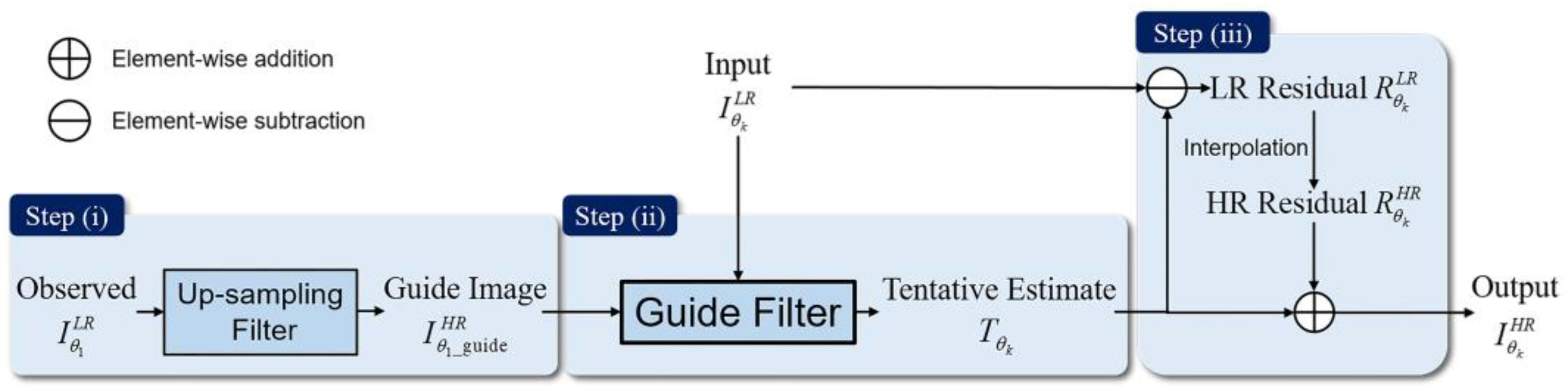
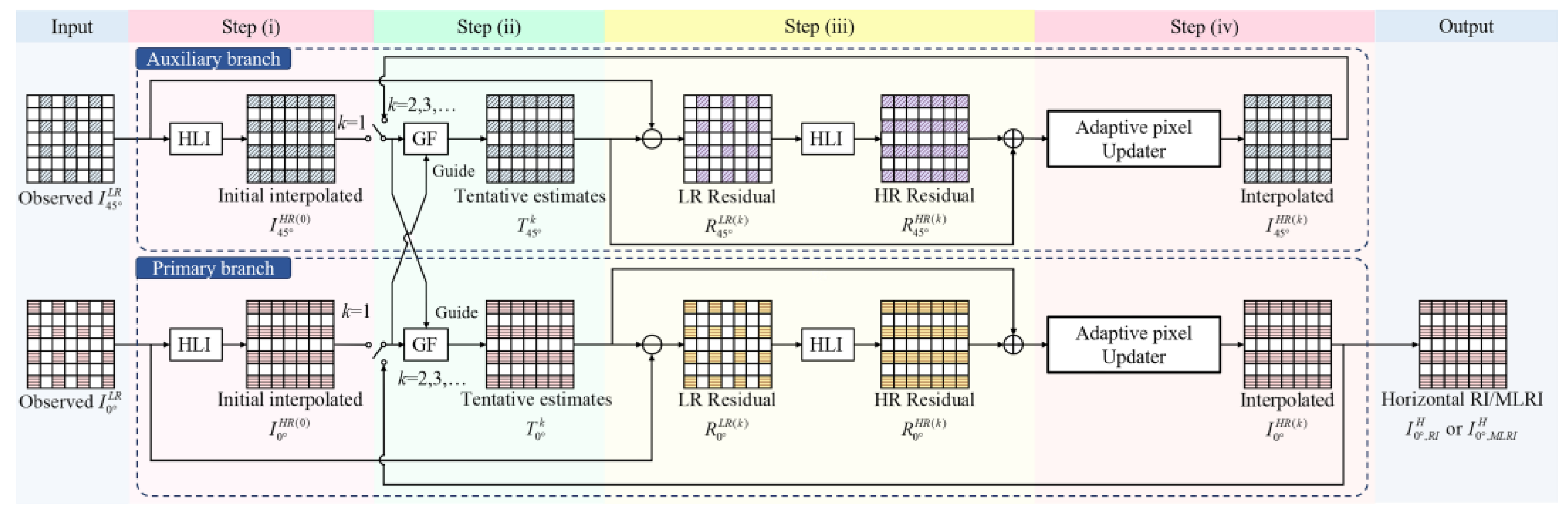
- i
- Generate the guide image: We use an up-sampling filter to interpolate the low-resolution observed image in a certain polarization direction to generate the guide image . We generally select the same channel as the input image or the 0° channel as the guide image.
- ii
- Generate the initial estimate: We select four low-resolution observation images (k = 1, 2, 3, 4) as input images to get initial estimates through RI or MLRI guide filters.
- iii
- Interpolation in residual domain: We calculate a low-resolution residual image by making difference between the initial estimate and the input image . Then, we add the high-resolution residual image generated by interpolating and initial estimate to output the final high-resolution image .
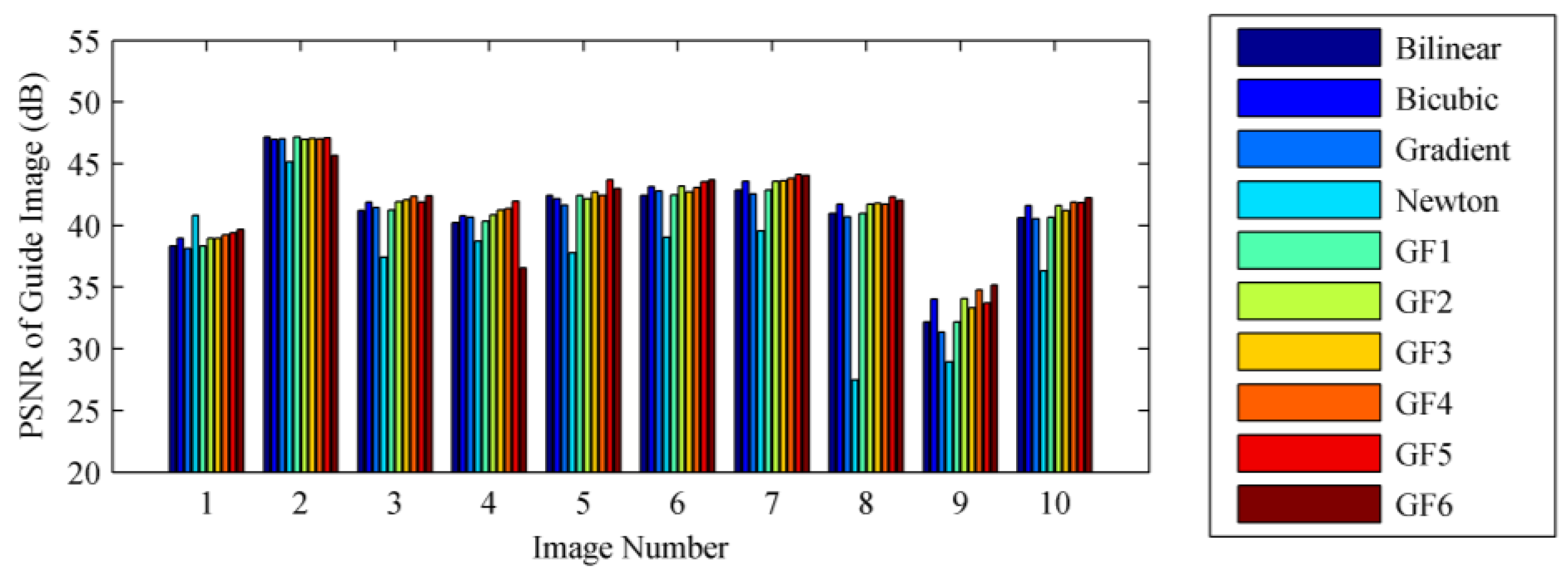
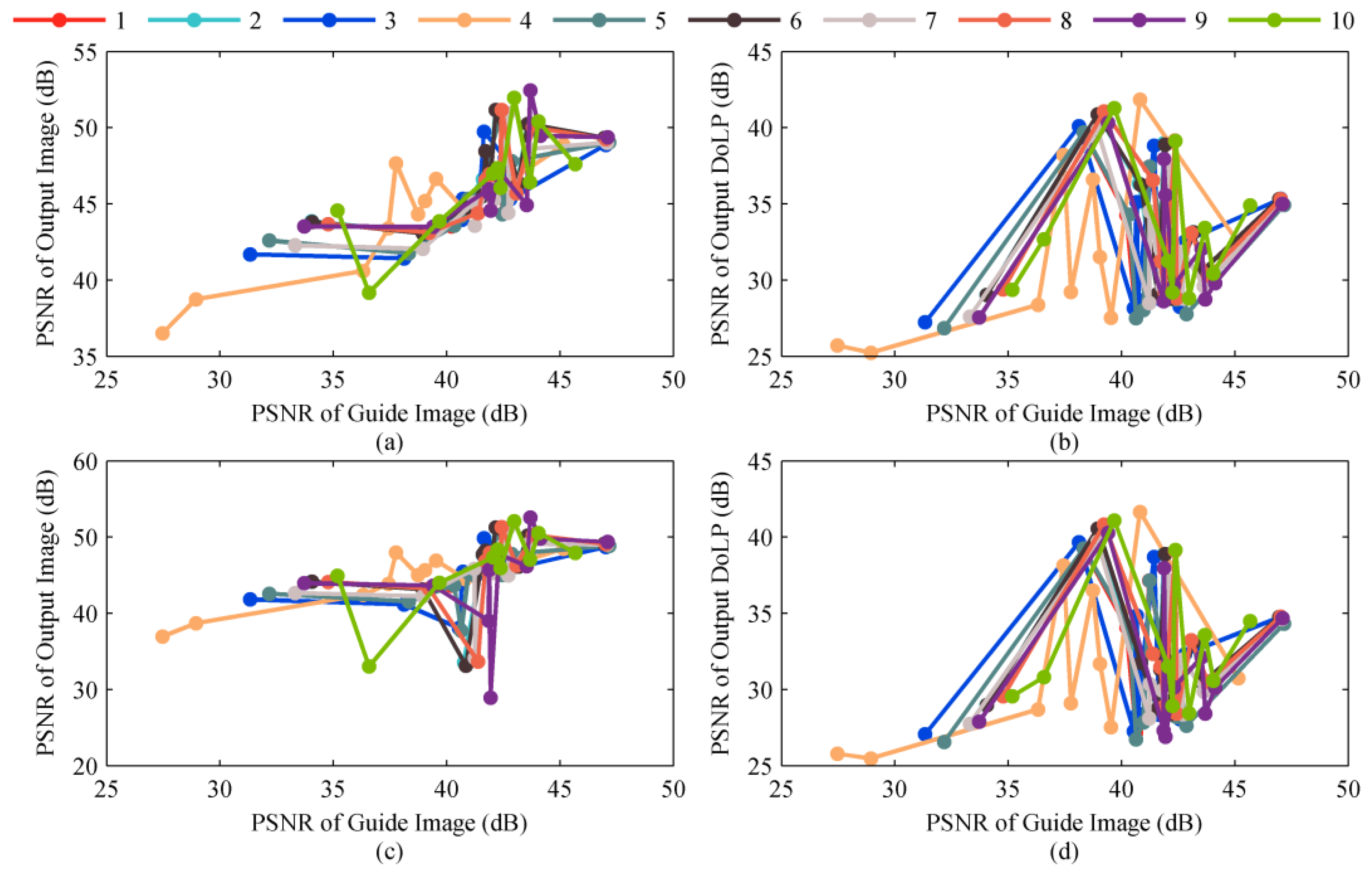
3.2. Influence of the Up-Sampling Filter
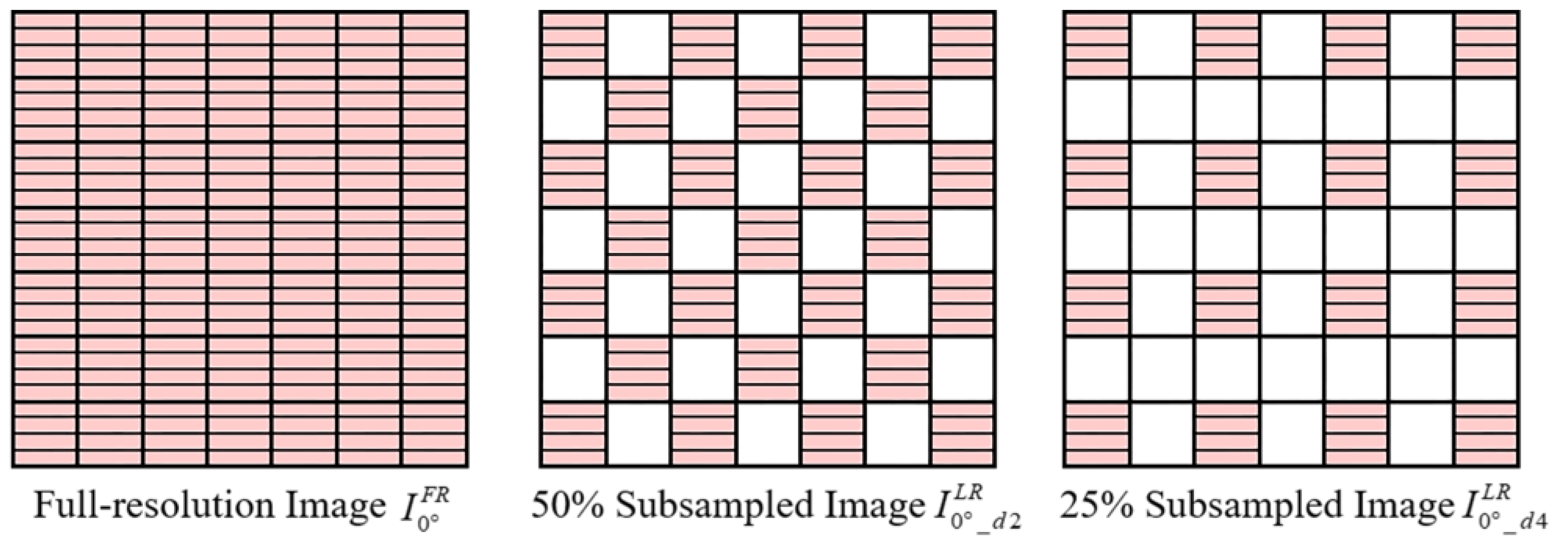
3.3. Influence of the Sampling Rate of the Guide Image
4. The Proposed PAIPRI
4.1. Overall Pipeline
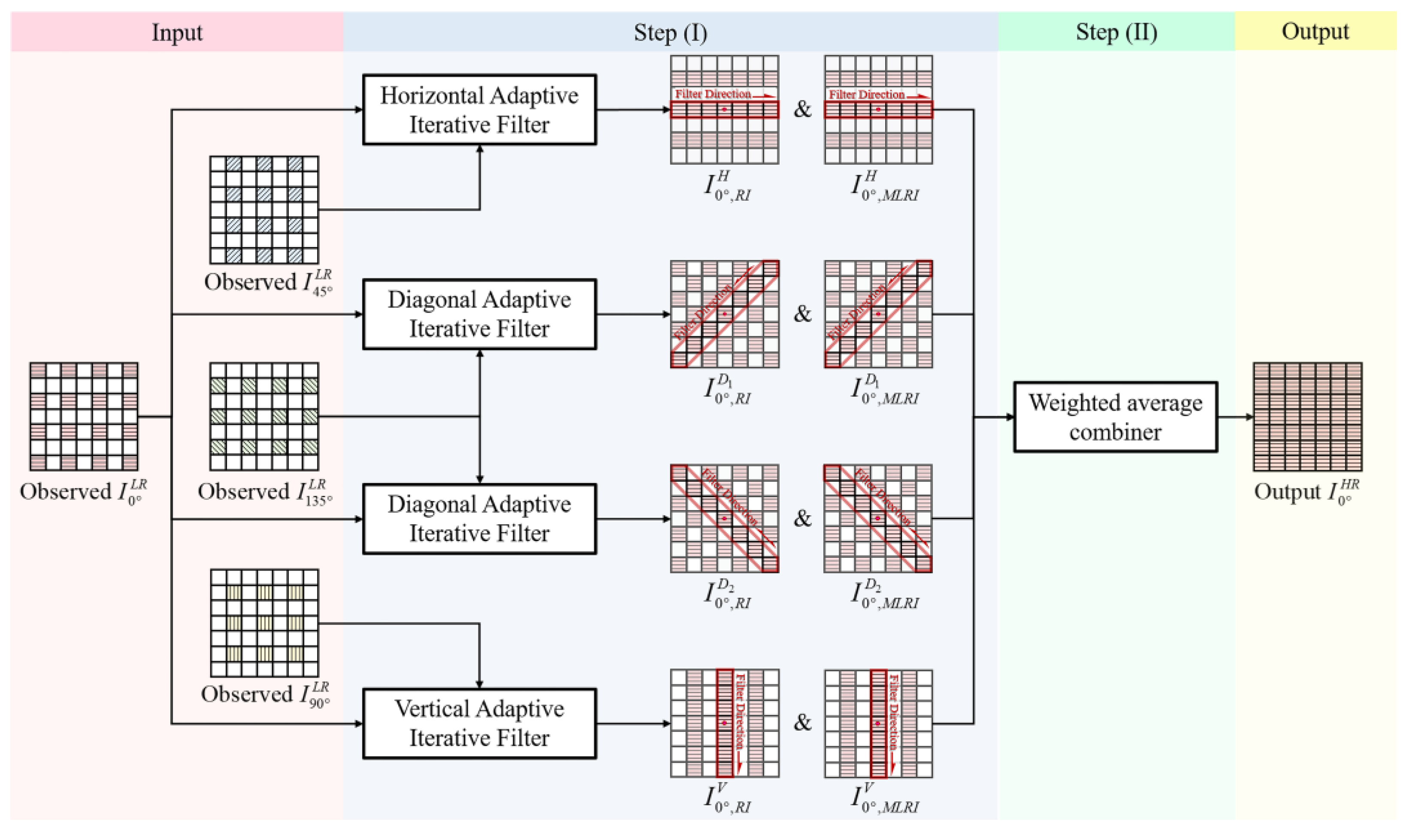
- I
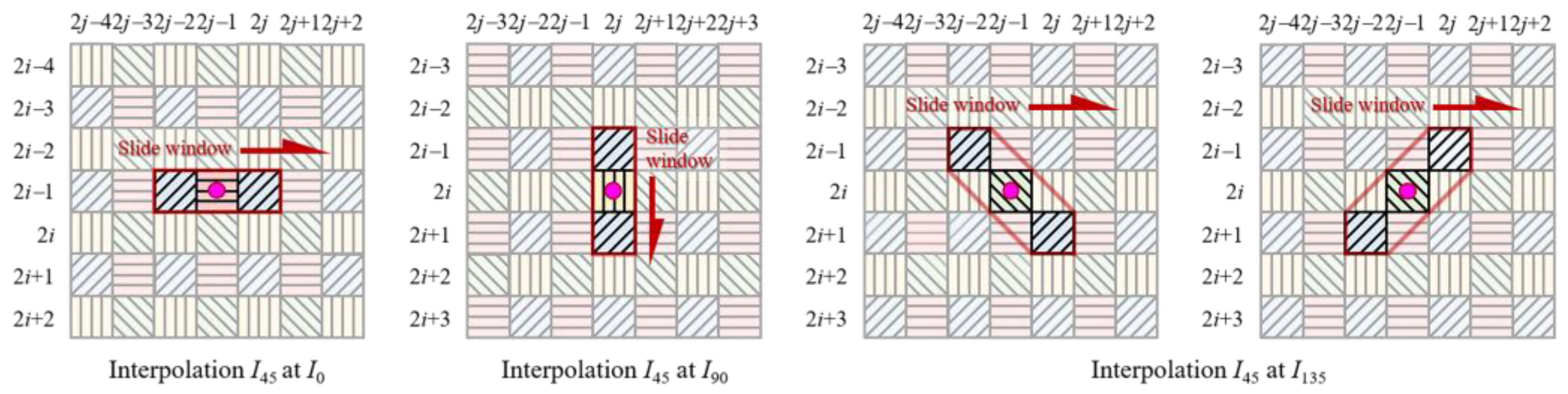
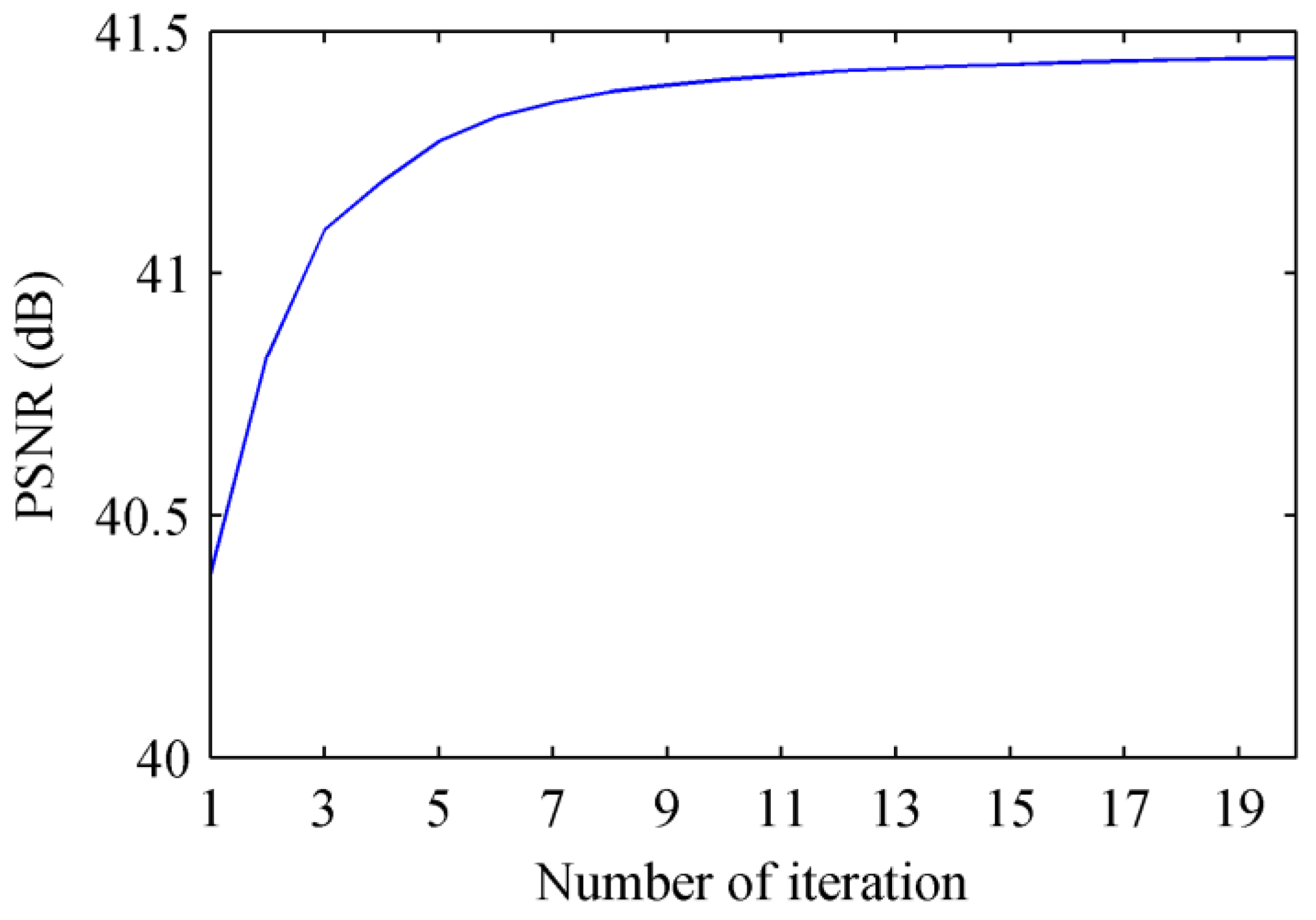
- Pixel-by-pixel adaptive iterative processes based on residual interpolation in horizontal, vertical, and two diagonal directions: We chose different channels as the guide images for pixels in different spatial positions according to the spatial layout of the pixeled polarizer array, and designed the filter windows with different sizes and directions. When using as the input image, we operated iterative RI and MLRI in horizontal, vertical, and two diagonal directions, referring to the guide images I45°, I135°, and I90°, respectively. In each iterative process, a local criterion was calculated for each reconstructed pixel to adaptively determine whether to update the interpolation result in this iteration. Until all pixels in FPA completed their update or the iterative number reached the maximum iterative number, eight sets of interpolation images, with RI and MLRI in the horizontal, vertical and two diagonal directions, could be obtained.
- II
- According to the spatial layout of the reconstructed pixels, we performed an adaptively weighted average fusion on the eight sets of interpolation images with RI and MLRI in the horizontal, vertical and two diagonal directions to generate the final output up-sampling image, .
4.2. Pixel-by-Pixel Adaptive Iterative Processes Based on Residual Interpolation
- (i)
- Calculate the initial value and of the iteration
- (ii)
- Calculate the initial estimate and
- (iii)
- Calculate the residual and
- (iv)
- Pixel-by-pixel adaptively updated iterative results
4.3. Fusion on the Iterative Results
| Alogrithem 1: PAIPRI |
| Input: Given the low-resolution observed images of the four polarization direction , , , and , the initial value of the window size, and the maximum number of iterations kmax. Output: Four high-resolution output images , , , and . For k = 1:kmax: (i) Calculate the initial iterative value using Equation (5). (ii) Calculate the initial estimate using RI and MLRI in horizontal, vertical, and two diagonal directions for each polarization direction. Solve the linear coefficients using Equations (9)–(12). Then, substitute the linear coefficients and the previous iteration result into Equation (13) to generate the initial estimate in current iteration. (iii) Calculate the residual images in horizontal, vertical, and two diagonal directions for each polarization direction. Substitute the input low-resolution observed image and the initial estimate generated by Step (ii) into Equation (14) to generate the residual images. (iv) Pixel-by-pixel adaptively update iterative results. If criteria in k-th iteration < criteria in the previous iteration: Update iterative results in this pixel using Equations (18) and (19). end end (v) Generate the finial output images by adaptively weighting the eight sets of interpolation images with RI and MLRI in the horizontal, vertical and two diagonal directions using Equation (20) after k reaches kmax or all the pixels complete updating. |
5. Experimental Verification and Discussion
5.1. Dataset
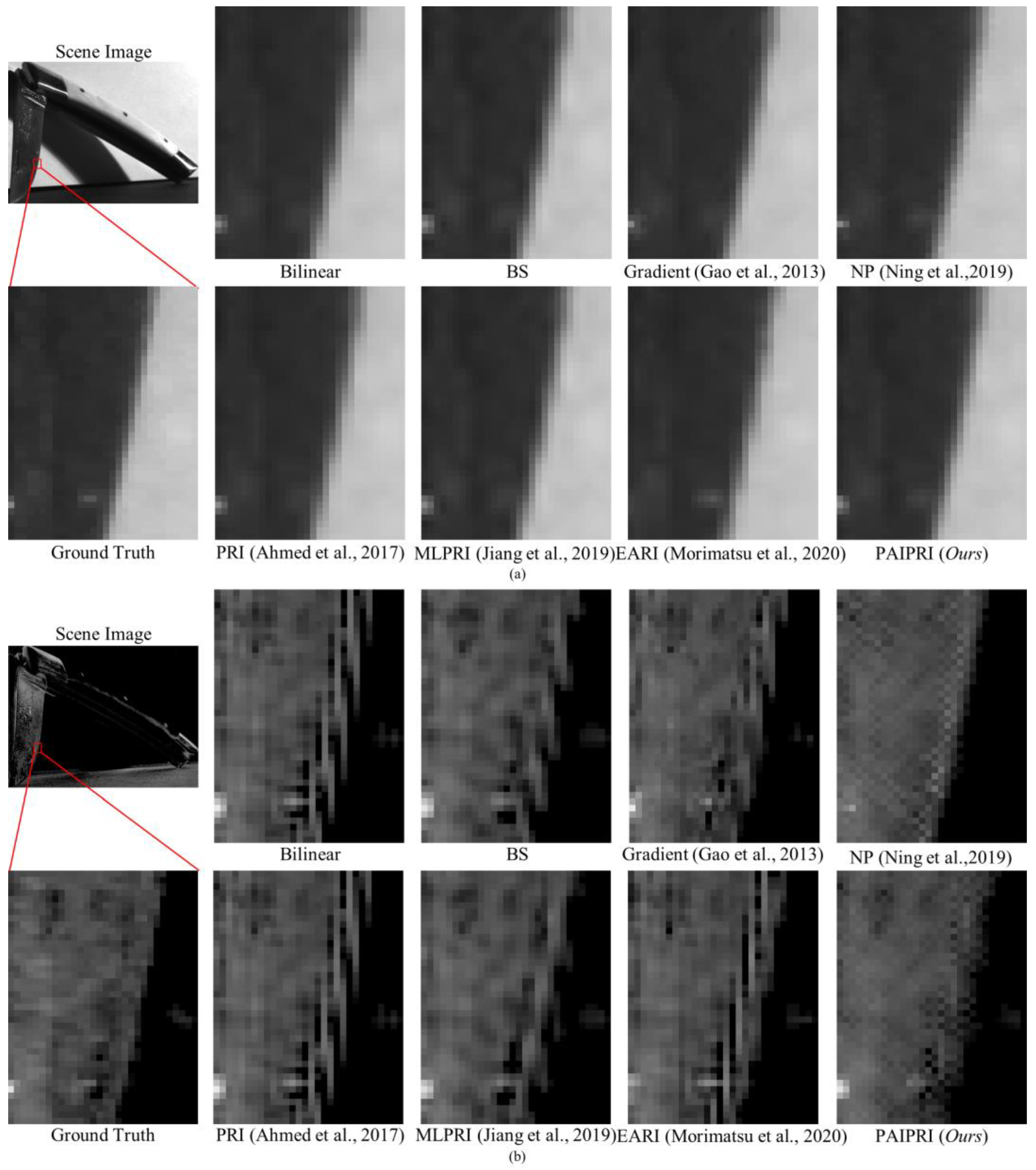
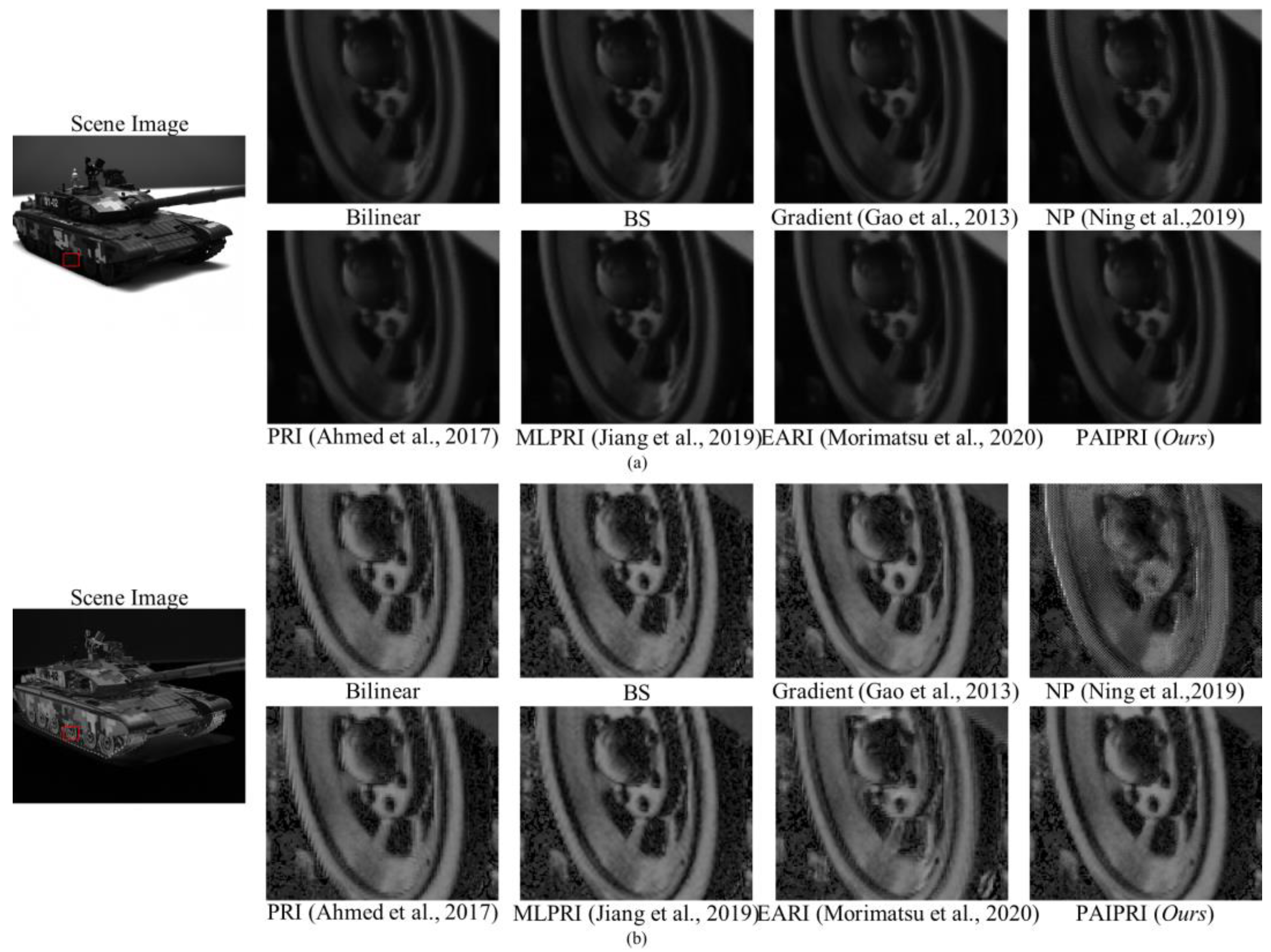
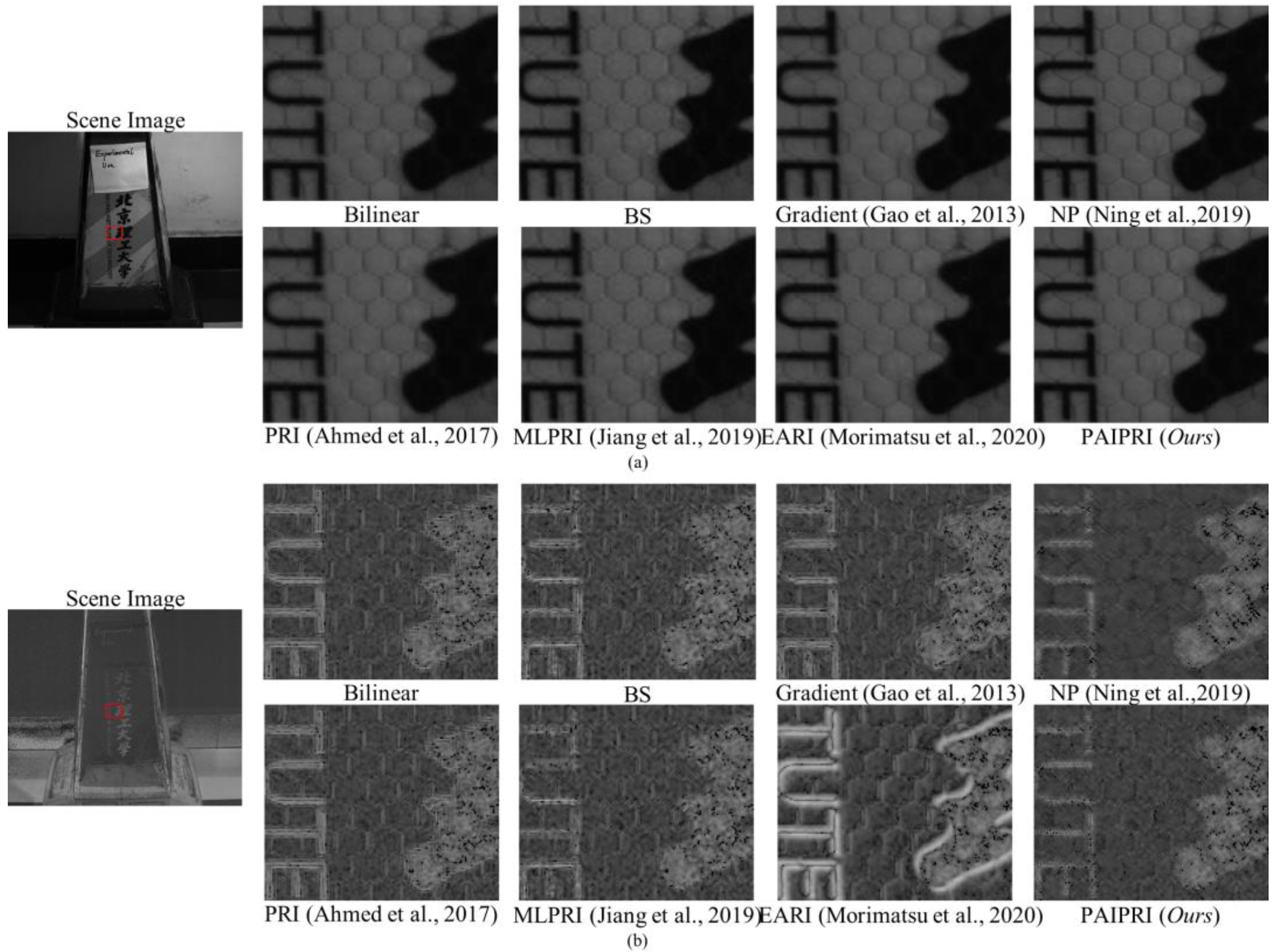
- (1)
- Single arc-shaped edge: Due to the difference in material and surface roughness between the target and the background, the boundary in the selected local region 1 appears as continuous and sharp arc-shaped edges in both the intensity images and the polarization images. This type of edge and its neighborhoods in the reconstructed results are easily affected by the IFOV error, and further exhibit a sawtooth effect.
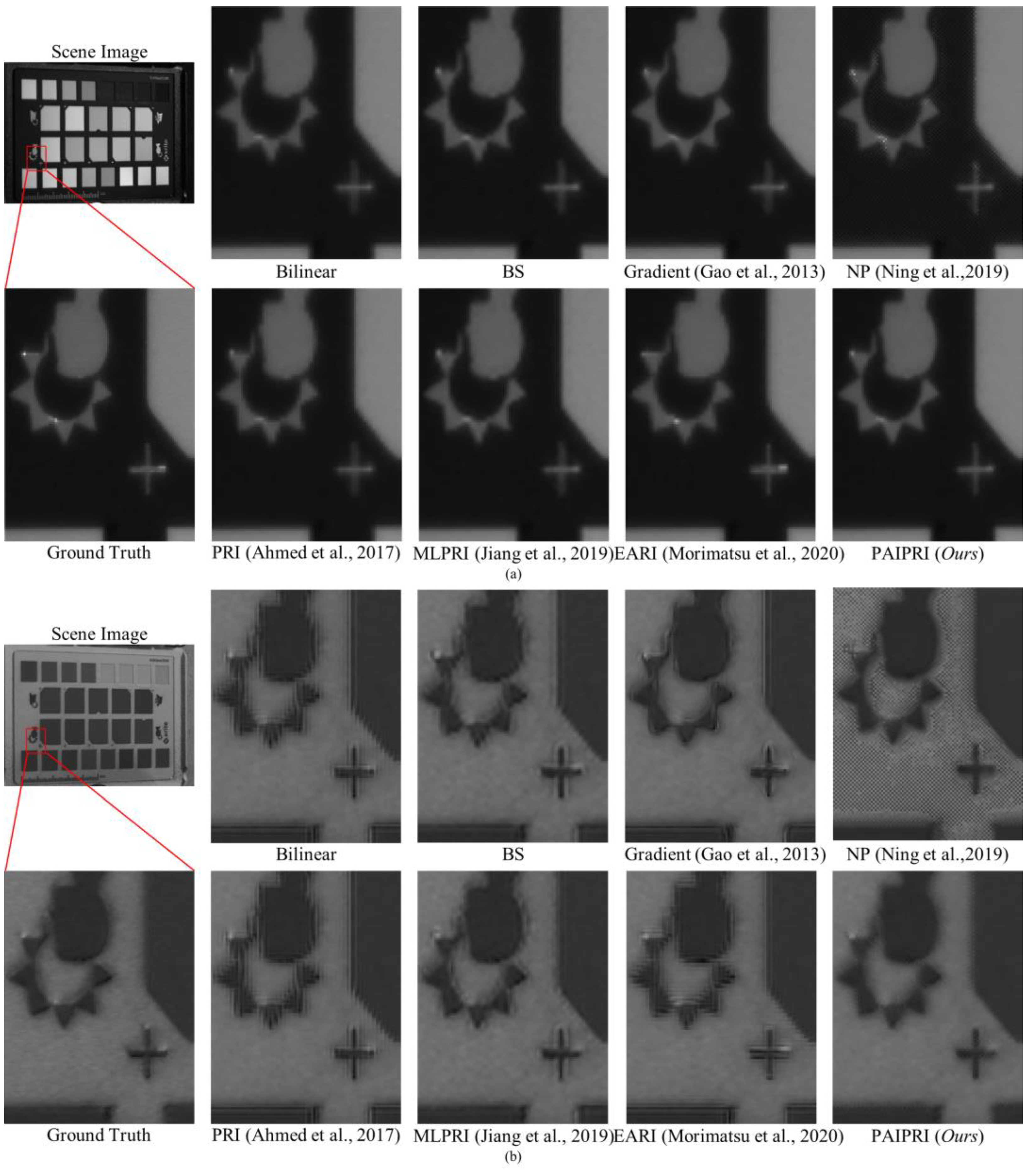
- (2)
- Multi-directional assorted edges: The selected local region 2 contains at least two of the horizontal, vertical, multi-oblique, or arc-shaped edges. This type of edge, and their neighborhoods in the reconstructed results, are easily affected by the IFOV error, and further exhibit sawtooth effect or edge artifacts.
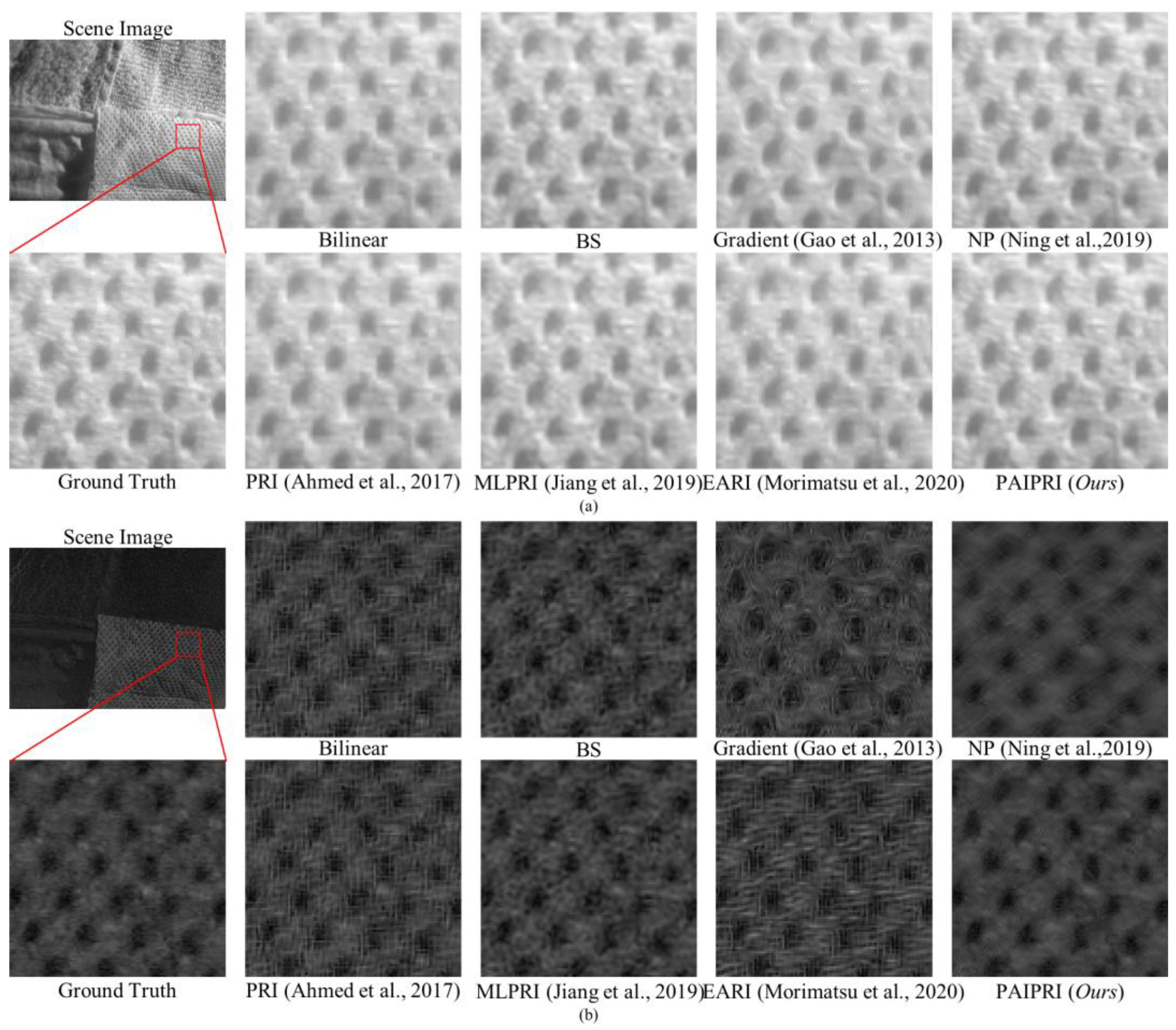
- (3)
- Abundant texture features: The selected local region 3 contains a periodic hole structure. This periodic hole structure appears as a distinct texture feature in both the intensity images and the polarization images. This texture feature is easily affected by the IFOV error in the reconstructed results, and further exhibits additional error textures.
5.2. Images Collected by a Real-World DoFP Polarimeter
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gurton, K.; Felton, M.; Mack, R.; LeMaster, D.; Farlow, C.; Kudenov, M.; Pezzaniti, L. MidIR and LWIR polarimetric sensor comparison study. Int. Soc. Opt. Photonics 2010, 7672, 767205. [Google Scholar]
- Hu, Y.; Li, Y.; Pan, Z. A Dual-Polarimetric SAR Ship Detection Dataset and a Memory-Augmented Autoencoder-Based Detection Method. Sensors 2021, 21, 8478. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, Z.; Zhou, J.; Li, N.; Zhou, X.; Chen, P.; Zheng, Y.; Chen, X.; Lu, W. High extinction ratio super pixel for long wavelength infrared polarization imaging detection based on plasmonic microcavity quantum well infrared photodetectors. Sci. Rep. 2018, 8, 15070. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reda, M.; Zhao, Y.; Chan, J. Polarization Guided Auto-Regressive Model for Depth Recovery. IEEE Photonics J. 2017, 9, 6803016. [Google Scholar] [CrossRef]
- Wang, S.; Liu, B.; Chen, Z.; Li, H.; Jiang, S. The Segmentation Method of Target Point Cloud for Polarization-Modulated 3D Imaging. Sensors 2020, 20, 179. [Google Scholar] [CrossRef] [Green Version]
- Miyazaki, D.; Shigetomi, T.; Baba, M.; Furukawa, R. Surface normal estimation of black specular objects from multiview polarization images. Opt. Eng. 2016, 56, 041303. [Google Scholar] [CrossRef] [Green Version]
- Xue, F.; Jin, W.; Qiu, S.; Yang, J. Polarized observations for advanced atmosphere-ocean algorithms using airborne multi-spectral hyper-angular polarimetric imager. ISPRS J. Photogramm. Remote Sens. 2021, 178, 136–154. [Google Scholar] [CrossRef]
- Ge, B.; Mei, X.; Li, Z.; Hou, W.; Xie, Y.; Zhang, Y.; Xu, H.; Li, K.; Wei, Y. Airborne optical polarization imaging for observation of submarine Kelvin wakes on the sea surface: Imaging chain and simulation. Remote Sens. Environ. 2020, 247, 111894. [Google Scholar] [CrossRef]
- Ojha, N.; Merlin, O.; Amazirh, A.; Ouaadi, N.; Rivalland, V.; Jarlan, L.; Er-Raki, S.; Escorihuela, M. A Calibration/Disaggregation Coupling Scheme for Retrieving Soil Moisture at High Spatio-Temporal Resolution: Synergy between SMAP Passive Microwave, MODIS/Landsat Optical/Thermal and Sentinel-1 Radar Data. Sensors 2021, 21, 7406. [Google Scholar] [CrossRef]
- Liu, X.; Shao, Y.; Liu, L.; Li, K.; Wang, J.; Li, S.; Wang, J.; Wu, X. Effects of Plant Crown Shape on Microwave Backscattering Coefficients of Vegetation Canopy. Sensors 2021, 21, 7748. [Google Scholar] [CrossRef]
- He, C.; He, H.; Chang, J.; Dong, Y.; Liu, S.; Zeng, N.; He, Y.; Ma, H. Characterizing microstructures of cancerous tissues using multispectral transformed Mueller matrix polarization parameters. Biomed. Opt. Express 2015, 6, 2934–2945. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gruev, V.; Perkins, R.; York, T. CCD polarization imaging sensor with aluminum nanowire optical filters. Opt. Express 2010, 18, 19087–19094. [Google Scholar] [CrossRef] [PubMed]
- Andreou, A.; Kalayjian, Z. Polarization imaging: Principles and integrated polarimeters. IEEE Sens. J. 2002, 2, 566–576. [Google Scholar] [CrossRef]
- Zhao, X.; Bermak, A.; Boussaid, F.; Chigrinov, V. Liquid-crystal micropolarimeter array for full Stokes polarization imaging in visible spectrum. Opt. Express 2010, 18, 17776–17787. [Google Scholar] [CrossRef] [PubMed]
- Tyo, J.; Goldstein, D.; Chenault, D.; Shaw, J. Review of passive imaging polarimetry for remote sensing applications. Appl. Opt. 2006, 45, 5453–5469. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lucid Vision TELEDYNE FLIR. Blackfly S USB3. Available online: https://www.flir.cn/products/blackfly-s-usb3/?model=BFS-U3-51S5P-C (accessed on 16 July 2021).
- 4D Technology Imaging Polarimeters. Available online: https://www.4dtechnology.com/products/imaging-polarimeters (accessed on 16 July 2021).
- Lucid Vision Labs Phoenix Network Camera Suitable for OEM Ultra-Small and Deformable. Available online: http://thinklucid.cn/phoenix-machine-vision (accessed on 16 July 2021).
- Hou, H.; Andrews, H. Cubic splines for image interpolation and digital filtering. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 508–517. [Google Scholar]
- Li, M.; Nguyen, T. Markov Random Field Model-Based Edge-Directed Image Interpolation. IEEE Trans. Image Process. 2008, 17, 1121–1128. [Google Scholar]
- Pekkucuksen, I.; Altunbasak, Y. Multiscale Gradients-Based Color Filter Array Interpolation. IEEE Trans. Image Process. 2013, 22, 157–165. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Residual interpolation for color image demosaicking. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Melbourne, Australia, 15–18 September 2013. [Google Scholar]
- Ye, W.; Ma, K. Image demosaicing by using iterative residual interpolation. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Paris, France, 27–39 October 2014. [Google Scholar]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Minimized-Laplacian Residual Interpolation for Color Image Demosaicking. Proc. SPIE-Int. Soc. Opt. Eng. 2014, 9023, 90230L. [Google Scholar]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Beyond Color Difference: Residual Interpolation for Color Image Demosaicking. IEEE Trans. Image Process. 2016, 25, 1288–1300. [Google Scholar] [CrossRef] [PubMed]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking. Sensors 2017, 17, 2787. [Google Scholar]
- Ratliff, B.; Boger, J.; Fetrow, M.; Tyo, J.; Black, W. Image processing methods to compensate for IFOV errors in microgrid imaging polarimeters. Proc. SPIE 2006, 6240, 139–174. [Google Scholar]
- Ratliff, B.; Shaw, J.; Tyo, J.; Boger, J.; Black, W.; Bowers, D.; Kumar, R. Mitigation of image artifacts in LWIR microgrid polarimeter images. Proc. SPIE-Int. Soc. Opt. Eng. 2007, 6682, 668209. [Google Scholar]
- Ratliff, B.; Charles, C.; Tyo, J. Interpolation strategies for reducing IFOV artifacts in microgrid polarimeter imagery. Opt. Express 2009, 17, 9112–9125. [Google Scholar] [CrossRef]
- York, T.; Powell, S.; Gruev, V. A comparison of polarization image processing across different platforms. Proc. SPIE 2011, 8160, 816004. [Google Scholar]
- Gao, S.; Gruev, V. Image interpolation methods evaluation for division of focal plane polarimeters. Proc. SPIE-Int. Soc. Opt. Eng. 2011, 8012, 150–154. [Google Scholar]
- Gao, S.; Gruev, V. Bilinear and bicubic interpolation methods for division of focal plane polarimeters. Opt. Express 2011, 19, 26161–26173. [Google Scholar] [CrossRef]
- Gao, S.; Gruev, V. Gradient based interpolation for division of focal plane polarization imaging sensor. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Seoul, Korea, 20–23 May 2012. [Google Scholar]
- Gao, S.; Gruev, V. Gradient-based interpolation method for division-of-focal-plane polarimeters. Opt. Express 2013, 21, 1137–1151. [Google Scholar] [CrossRef]
- Zhang, J.; Ye, W.; Ahmed, A.; Qiu, Z.; Cao, Y.; Zhao, X. A Novel Smoothness-Based Interpolation Algorithm for Division of Focal Plane Polarimeters. In Proceedings of the IEEE International Symposium on Circuits & Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017. [Google Scholar]
- Xu, X.; Kulkarni, M.; Nehorai, A.; Gruev, V. A correlation-based interpolation algorithm for division-of-focal-plane polarization sensors. Proc. SPIE 2012, 8364, 83640L. [Google Scholar]
- Zhang, J.; Luo, H.; Hui, B.; Chang, Z. Image interpolation for division of focal plane polarimeters with intensity correlation. Opt. Express 2016, 24, 20799–20807. [Google Scholar] [CrossRef] [PubMed]
- Ning, L.; Zhao, Y.; Quan, P.; Kong, S. Demosaicking DoFP images using Newton’s polynomial interpolation and polarization difference model. Opt. Express 2019, 27, 1376–1391. [Google Scholar]
- Wu, R.; Zhao, Y.; Li, N.; Kong, S. Polarization image demosaicking using polarization channel difference prior. Opt. Express 2021, 29, 22066–22079. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, A.; Zhao, X.; Gruev, V.; Chang, J.; Bermak, A. Residual interpolation for division of focal plane polarization image sensors. Opt. Express 2017, 25, 10651–10662. [Google Scholar] [CrossRef]
- Ahmed, A.; Zhao, X.; Chang, J.; Ma, H.; Gruev, V.; Bermak, A. Four-Directional Adaptive Residual Interpolation Technique for DoFP Polarimeters with Different Micro-polarizer Patterns. IEEE Sens. J. 2018, 18, 7990–7997. [Google Scholar] [CrossRef]
- Jiang, T.; Wen, D.; Song, Z.; Zhang, W.; Li, Z.; Wei, X.; Liu, G. Minimized Laplacian residual interpolation for DoFP polarization image demosaicking. Appl. Opt. 2019, 58, 7367–7374. [Google Scholar] [CrossRef] [PubMed]
- Morimatsu, M.; Monno, Y.; Tanaka, M.; Okutomi, M. Monochrome and Color Polarization Demosaicking Using Edge-Aware Residual Interpolation. In Proceedings of the 27th IEEE International Conference on Image Processing (ICIP), Abu Dhabi, United Arab Emirates, 25–28 October 2020. [Google Scholar]
- Liu, S.; Chen, J.; Xun, Y.; Zhao, X.; Chang, C. A New Polarization Image Demosaicking Algorithm by Exploiting Inter-Channel Correlations with Guided Filtering. IEEE Trans. Image Process. 2020, 29, 7076–7089. [Google Scholar] [CrossRef]
- Połap, D.; Srivastava, G. Neural image reconstruction using a heuristic validation mechanism. Neural Comput. Appl. 2021, 33, 10787–10797. [Google Scholar] [CrossRef]
- Qiu, S.; Fu, Q.; Wang, C.; Heidrich, W. Polarization demosaicking for monochrome and color polarization focal plane arrays. In Proceedings of the International Symposium on Vision, Modeling, and Visualization (VMV), Rostock, Germany, 30 September 2019. [Google Scholar]
- Zhang, J.; Luo, H.; Liang, R.; Ahmed, A.; Zhang, X.; Hui, B.; Chang, Z. Sparse representation-based demosaicing method for microgrid polarimeter imagery. Opt. Lett. 2018, 43, 3265–3268. [Google Scholar] [CrossRef]
- Zhang, J.; Shao, J.; Luo, H.; Zhang, X.; Hui, B.; Chang, Z.; Liang, R. Learning a convolutional demosaicing network for microgrid polarimeter imagery. Opt. Lett. 2018, 43, 4534–4537. [Google Scholar] [CrossRef]
- Wen, S.; Zheng, Y.; Lu, F.; Zhao, Q. Convolutional demosaicing network for joint chromatic and polarimetric imagery. Opt. Lett. 2019, 44, 5646–5649. [Google Scholar] [CrossRef]
- Zeng, X.; Luo, Y.; Zhao, X.; Ye, W. An end-to-end fully-convolutional neural network for division of focal plane sensors to reconstruct S0, DoLP, and AoP. Opt. Express 2019, 27, 8566–8577. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Qiu, S.; Jin, W.; Xue, F. Temporal and spatial error model for estimating the measurement precision of the division of focal plane polarimeters. Opt. Express 2021, 29, 20808–20828. [Google Scholar] [CrossRef]
- Mihoubi, S.; Lapray, P.; Bigué, L. Survey of Demosaicking Methods for Polarization Filter Array Images. Sensors 2018, 18, 3688. [Google Scholar] [CrossRef] [Green Version]
- Stokes, G. On the Composition and Resolution of Streams of Polarized Light from different Sources. Trans. Camb. Philos. Soc. 1852, 9, 399–416. [Google Scholar]
- Lapray, P.; Gendre, L.; Foulonneau, A.; Bigue, L. Database of polarimetric and multispectral images in the visible and NIR regions. Proc. SPIE 2018, 10677, 1067738. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Number | Bilinear | BS | Gradient [35] | NP [39] | PRI [41] | MLPRI [43] | EARI [44] | PAIPRI |
|---|---|---|---|---|---|---|---|---|
| 1 | 38.56 | 39.40 | 38.39 | 41.20 | 38.56 | 39.40 | 38.64 | 41.40 |
| 2 | 47.77 | 47.76 | 47.77 | 42.99 | 47.78 | 47.76 | 39.97 | 48.21 |
| 3 | 41.51 | 42.45 | 41.93 | 38.10 | 41.54 | 42.50 | 38.44 | 42.97 |
| 4 | 42.00 | 42.65 | 42.44 | 39.21 | 42.04 | 42.71 | 37.58 | 44.42 |
| 5 | 40.93 | 40.68 | 40.16 | 36.94 | 40.93 | 40.68 | 41.12 | 42.14 |
| 6 | 42.41 | 43.24 | 42.80 | 38.51 | 42.43 | 43.31 | 40.52 | 44.81 |
| 7 | 42.54 | 43.46 | 42.27 | 37.52 | 42.54 | 43.46 | 42.53 | 45.00 |
| 8 | 41.65 | 42.64 | 41.46 | 30.95 | 41.65 | 42.64 | 41.48 | 44.44 |
| 9 | 31.45 | 33.49 | 30.62 | 27.97 | 31.45 | 33.52 | 31.46 | 34.38 |
| 10 | 39.44 | 40.49 | 39.34 | 34.55 | 39.45 | 40.52 | 37.80 | 42.05 |
| Average | 40.83 | 41.63 | 40.72 | 36.79 | 40.84 | 41.65 | 38.95 | 42.98 |
| Image Number | Bilinear | BS | Gradient [35] | NP [39] | PRI [41] | MLPRI [43] | EARI [44] | PAIPRI |
|---|---|---|---|---|---|---|---|---|
| 1 | 39.66 | 42.03 | 40.63 | 43.07 | 39.66 | 42.53 | 39.75 | 43.87 |
| 2 | 48.95 | 49.56 | 49.19 | 43.23 | 48.96 | 37.66 | 40.15 | 49.59 |
| 3 | 43.69 | 45.60 | 45.32 | 33.18 | 43.71 | 45.43 | 39.86 | 45.87 |
| 4 | 42.68 | 44.38 | 44.08 | 38.88 | 42.70 | 38.80 | 37.92 | 45.78 |
| 5 | 45.20 | 45.36 | 44.80 | 37.06 | 45.20 | 46.03 | 45.11 | 47.30 |
| 6 | 42.86 | 44.95 | 43.93 | 35.72 | 42.87 | 45.23 | 41.59 | 46.49 |
| 7 | 43.96 | 47.22 | 44.16 | 38.35 | 43.96 | 47.69 | 43.93 | 48.25 |
| 8 | 41.09 | 44.13 | 41.24 | 37.73 | 41.09 | 45.12 | 41.05 | 46.12 |
| 9 | 32.82 | 35.24 | 33.05 | 27.04 | 32.82 | 36.41 | 32.86 | 36.78 |
| 10 | 40.02 | 43.28 | 40.86 | 33.15 | 40.03 | 40.11 | 38.27 | 44.86 |
| Average | 42.09 | 44.18 | 42.73 | 36.74 | 42.10 | 42.50 | 40.05 | 45.49 |
| Image Number | Bilinear | BS | Gradient [35] | NP [39] | PRI [41] | MLPRI [43] | EARI [44] | PAIPRI |
|---|---|---|---|---|---|---|---|---|
| 1 | 41.01 | 42.67 | 41.67 | 42.95 | 41.01 | 43.06 | 40.55 | 43.62 |
| 2 | 37.64 | 37.70 | 37.80 | 28.58 | 37.65 | 33.84 | 35.94 | 37.91 |
| 3 | 39.83 | 40.96 | 40.92 | 34.12 | 39.83 | 40.99 | 38.80 | 41.27 |
| 4 | 37.02 | 37.90 | 37.85 | 36.08 | 37.03 | 37.12 | 35.79 | 39.38 |
| 5 | 31.66 | 31.49 | 31.37 | 29.22 | 31.66 | 31.54 | 30.77 | 31.93 |
| 6 | 34.34 | 34.66 | 34.58 | 23.09 | 34.35 | 34.82 | 33.04 | 35.66 |
| 7 | 31.23 | 32.52 | 31.26 | 20.09 | 31.23 | 32.40 | 30.80 | 33.19 |
| 8 | 31.37 | 33.03 | 31.58 | 18.03 | 31.37 | 33.27 | 31.12 | 34.35 |
| 9 | 28.34 | 29.77 | 28.78 | 16.37 | 28.34 | 30.17 | 28.81 | 30.72 |
| 10 | 30.98 | 31.56 | 31.04 | 25.17 | 30.98 | 31.39 | 30.37 | 32.07 |
| Average | 34.34 | 35.23 | 34.68 | 27.37 | 34.34 | 34.86 | 33.60 | 36.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Jin, W.; Qiu, S.; Xue, F.; Wang, M. Residual Interpolation Integrated Pixel-by-Pixel Adaptive Iterative Process for Division of Focal Plane Polarimeters. Sensors 2022, 22, 1529. https://doi.org/10.3390/s22041529
Yang J, Jin W, Qiu S, Xue F, Wang M. Residual Interpolation Integrated Pixel-by-Pixel Adaptive Iterative Process for Division of Focal Plane Polarimeters. Sensors. 2022; 22(4):1529. https://doi.org/10.3390/s22041529
Chicago/Turabian StyleYang, Jie, Weiqi Jin, Su Qiu, Fuduo Xue, and Meishu Wang. 2022. "Residual Interpolation Integrated Pixel-by-Pixel Adaptive Iterative Process for Division of Focal Plane Polarimeters" Sensors 22, no. 4: 1529. https://doi.org/10.3390/s22041529