
Designing Man’s New Best Friend: Enhancing Human-Robot Dog Interaction through Dog-Like Framing and Appearance

 , ,
, ,
Abstract
:1. Introduction
1.1. Robot Dogs Designed as Social Actors
1.2. Improving the Dog-Likeness of the Aibo Robot Dog for Long-Term Bonding and Trust
1.3. The Current Study
2. Materials and Methods
2.1. Participants
2.2. Apparatus and Materials
2.3. Task Paradigm
2.4. Video Coding and Self-Report Measures
2.5. Experimental Design and Procedure
2.6. Measures and Analysis of Commands Issued
2.7. Measures and Analysis of Interaction Blocks
2.8. T-Pattern Measures and Analysis
3. Results
3.1. Aibo Performance and Participant Command Behavior
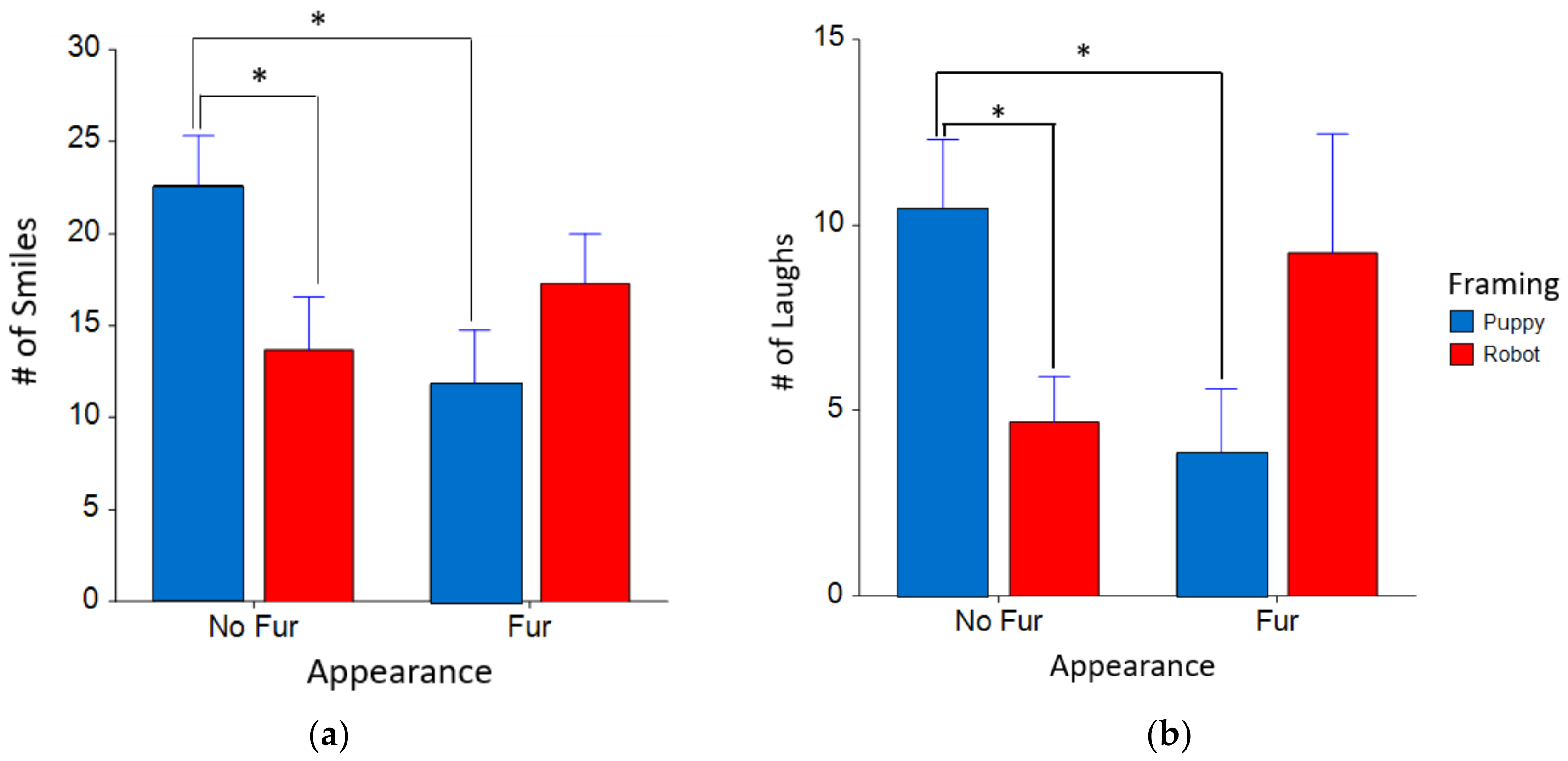
3.2. Interaction Block Results
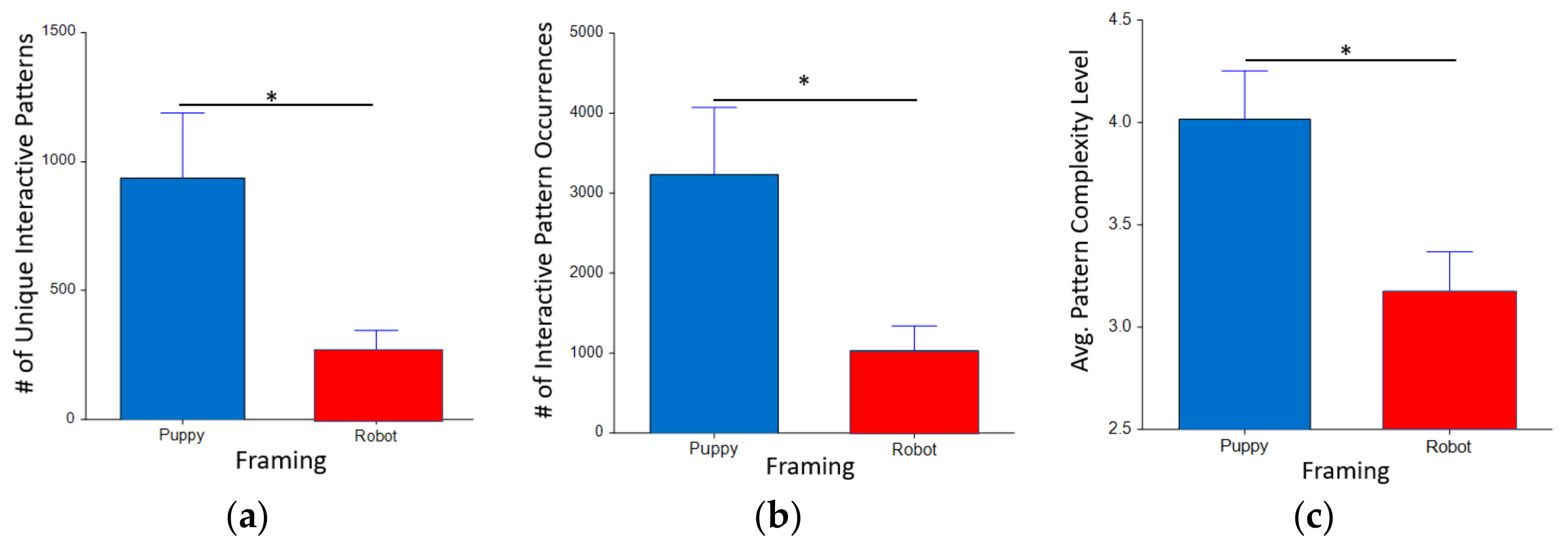
3.3. T-Pattern Analysis
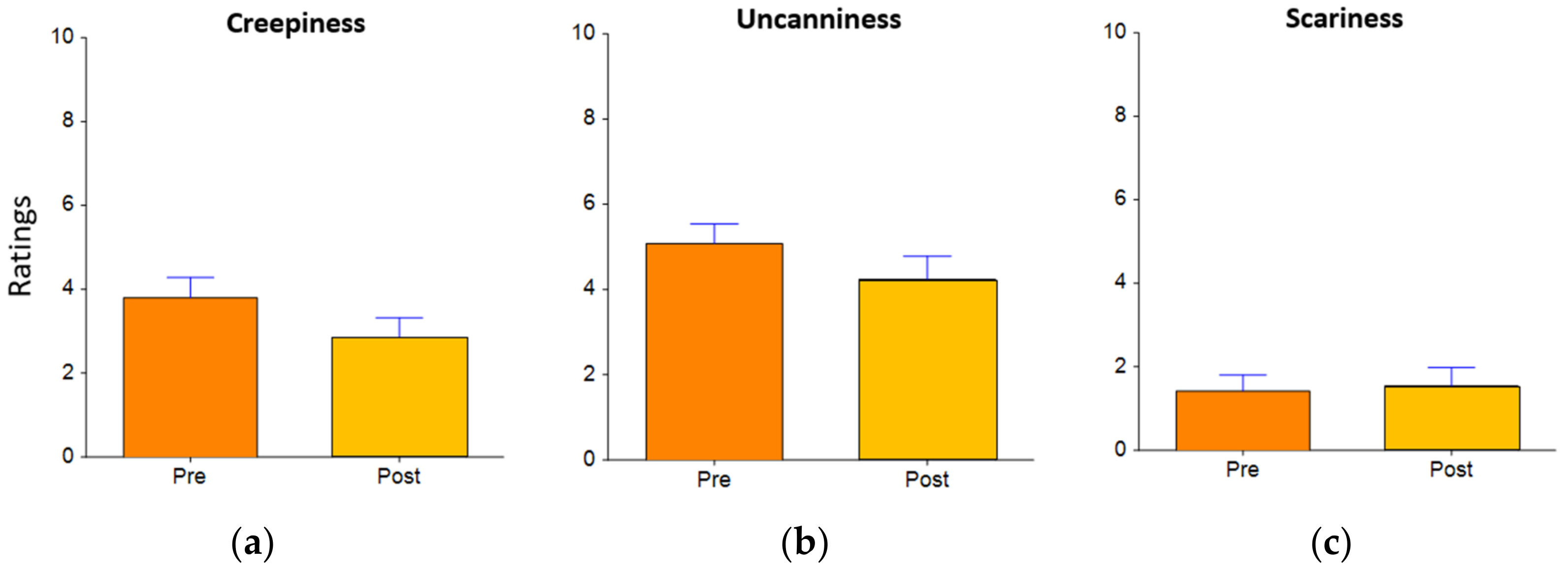
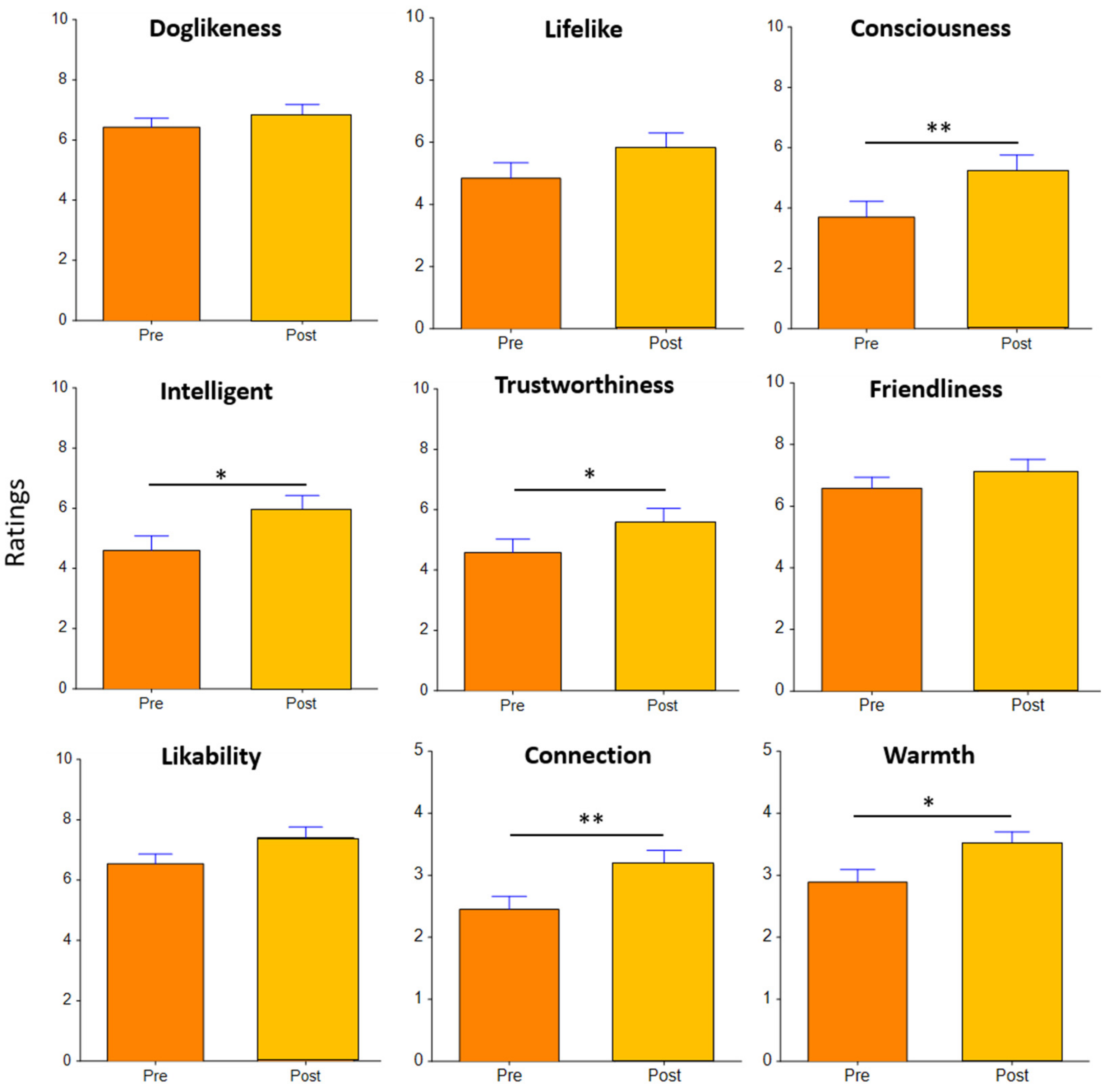
3.4. Questionnaire Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Scripts for Puppy and Robot Conditions
Appendix B
- Creepiness is “the characteristic of causing an annoyingly unpleasant sensation”. Please rate this robot on a scale of 0 (not at all creepy) to 10 (extremely creepy).
- Likability is “having qualities that cause others to feel warm familiarity, comfort, and favorable regard”. Please rate this robot on a scale of 0 (not at all likable) to 10 (extremely likable).
- Scary is “the characteristic of causing fright or alarm”. Please rate this robot on a scale of 0 (not at all scary) to 10 (extremely scary).
- Trustworthy is “the characteristic of inducing a sense of being reliable, capable, ethical and sincere”. Please rate this robot on a scale of 0 (not at all trustworthy) to 10 (extremely trustworthy).
- Uncanny is “the characteristic of seeming mysterious, weird, uncomfortably strange or unfamiliar”. Please rate this robot on a scale of 0 (not at all uncanny) to 10 (extremely uncanny).
- Dog-likeness is “the characteristic of having the appearance and traits of a dog”. Please rate this robot on a scale of 0 (not at all dog-like) to 10 (extremely dog-like).
- Conscious is “the characteristic of being aware of one’s own existence, sensations, thoughts, and surroundings”. Please rate this robot on a scale of 0 (not at all conscious) to 10 (extremely conscious).
- Lifelike is “the characteristic of being able to adapt to one’s environment”. Please rate this robot on a scale of 0 (not at all lifelike) to 10 (extremely lifelike).
- Intelligent is “the characteristic of having good understanding or a high mental capacity; quick to comprehend”. Please rate this robot on a scale of 0 (not at all intelligent) to 10 (extremely intelligent).
- Friendly is “the characteristic of being like a friend; kind, helpful”. Please rate this robot on a scale of 0 (not at all friendly) to 10 (extremely friendly).
- I felt I had a connection with the robot (Use scale from 1 (Strongly Disagree) to 5 (Strongly Agree)
- The robot was warm and caring (Use a scale from 1 (Strongly Disagree) to 5 (Strongly Agree).
References
- Banks, M.R.; Willoughby, L.M.; Banks, W.A. Animal-assisted therapy and loneliness in nursing homes: Use of robotic versus living dogs. J. Am. Med. Dir. Assoc. 2008, 9, 173–177. [Google Scholar] [CrossRef] [PubMed]
- Coghlan, S.; Waycott, J.; Neves, B.B.; Vetere, F. Using robot pets instead of companion animals for older people: A case of ‘reinventing the wheel’? In Proceedings of the 30th Australian Conference on Computer-Human Interaction, Melbourne, VIC, Australia, 4–7 December 2018; pp. 172–183. [Google Scholar]
- Hudson, J.; Ungar, R.; Albright, L.; Tkatch, R.; Schaeffer, J.; Wicker, E.R. Robotic Pet Use Among Community-Dwelling Older Adults. J. Gerontol. Ser. B 2020, 75, 2018–2028. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, K.; Makino, H.; Nakamura, K.; Nakamura, A.; Hayakawa, M.; Uchida, H.; Kasahara, M.; Kato, H.; Igarashi, T. The Pilot Study of Group Robot Intervention on Pediatric Inpatients and Their Caregivers, Using ‘New Aibo’. Eur. J. Pediatr. Germany 2021. [Google Scholar] [CrossRef] [PubMed]
- USAF. Tyndall Air Force Base Receives Semi-Autonomous Robot Dogs. Available online: https://www.tyndall.af.mil/News/Article-Display/Article/2550793/tyndall-brings-in-the-big-dogs/ (accessed on 25 March 2021).
- Krueger, F.; Mitchell, K.C.; Deshpande, G.; Katz, J.S. Human-dog relationships as a working framework for exploring human-robot attachment: A multidisciplinary review. Anim. Cogn. 2021, 24, 371–385. [Google Scholar] [CrossRef]
- Nagasawa, M.; Mitsui, S.; En, S.; Ohtani, N.; Ohta, M.; Sakuma, Y.; Onaka, T.; Mogi, K.; Kikusui, T. Social evolution. Oxytocin-gaze positive loop and the coevolution of human-dog bonds. Science 2015, 348, 333–336. [Google Scholar] [CrossRef] [PubMed]
- Helton, W.S. Canine Ergonomics: The Science of Working Dogs; CRC Press: Boca Raton, FL, USA, 2009; pp. 1–349. [Google Scholar]
- Phillips, E.; Schaefer, K.E.; Billings, D.R.; Jentsch, F.; Hancock, P.A. Human-animal teams as an analog for future human-robot teams: Influencing design and fostering trust. J. Hum.-Robot Interact. 2016, 5, 100–125. [Google Scholar] [CrossRef]
- De Visser, E.J.; Monfort, S.S.; Goodyear, K.; Lu, L.; O’Hara, M.; Lee, M.R.; Parasuraman, R.; Krueger, F. A Little Anthropomorphism Goes a Long Way: Effects of Oxytocin on Trust, Compliance, and Team Performance with Automated Agents. Hum. Factors 2017, 59, 116–133. [Google Scholar] [CrossRef] [Green Version]
- New York Police Department (N.Y.P.D.). Robot Dog’s Run Is Cut Short After Fierce Backlash. Available online: https://www.nytimes.com/2021/04/28/nyregion/nypd-robot-dog-backlash.html (accessed on 28 April 2021).
- Kim, B.; Haring, K.S.; Schellin, H.J.; Oberley, T.N.; Patterson, K.M.; Phillips, E.; Visser, E.J.d.; Tossell, C.C. How Early Task Success Affects Attitudes Toward Social Robots. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 287–289. [Google Scholar]
- Schellin, H.; Oberley, T.; Patterson, K.; Kim, B.; Haring, K.S.; Tossell, C.C.; Phillips, E.; Visser, E.J.d. Man’s New Best Friend? Strengthening Human-Robot Dog Bonding by Enhancing the Doglikeness of Sony’s Aibo. In Proceedings of the 2020 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 24 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kerepesi, A.; Jonsson, G.K.; Miklósi, Á.; Topál, J.; Csányi, V.; Magnusson, M.S. Detection of temporal patterns in dog-human interaction. Behav. Processes 2005, 70, 69–79. [Google Scholar] [CrossRef]
- Kerepesi, A.; Kubinyi, E.; Jonsson, G.K.; Magnusson, M.S.; Miklósi, Á. Behavioural comparison of human-animal (dog) and human-robot (AIBO) interactions. Behav. Processes 2006, 73, 92–99. [Google Scholar] [CrossRef]
- Kerepesi, A.; Jonsson, G.K.; Kubinyi, E.; Miklósi, Á. Can robots replace dogs? Comparison of temporal patterns in dog-human and robot-human interactions. In Human-Robot Interaction; Sarkar, N., Ed.; Itech Education and Publishing: Vienna, Austria, 2007; pp. 201–212. [Google Scholar]
- Fujita, M. How to make an autonomous robot as a partner with humans: Design approach versus emergent approach. Philos. Trans. Ser. A Math. Phys. Eng. Sci. 2007, 365, 21–47. [Google Scholar] [CrossRef]
- Fujita, M. On activating human communications with pet-type robot AIBO. Proc. IEEE 2004, 92, 1804–1813. [Google Scholar] [CrossRef]
- Friedman, B.; Kahn, P.H.; Hagman, J. Hardware companions? What online AIBO discussion forums reveal about the human-robotic relationship. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Ft. Lauderdale, FL, USA, 5–10 April 2003; pp. 273–280. [Google Scholar]
- Knox, E.; Watanabe, K. AIBO Robot Mortuary Rites in the Japanese Cultural Context*. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2020–2025. [Google Scholar]
- Kahn, P.H.; Friedman, B.; Pérez-Granados, D.R.; Freier, N.G. Robotic pets in the lives of preschool children. Interact. Stud. 2006, 7, 405–436. [Google Scholar] [CrossRef]
- Ribi, F.N.; Yokoyama, A.; Turner, D.C. Comparison of Children’s Behavior toward Sony’s Robotic Dog AIBO and a Real Dog: A Pilot Study. Anthrozoös 2008, 21, 245–256. [Google Scholar] [CrossRef]
- Weiss, A.; Wurhofer, D.; Tscheligi, M. “I love this dog”—Children’s emotional attachment to the robotic dog AIBO. Int. J. Soc. Robot. 2009, 1, 243–248. [Google Scholar] [CrossRef]
- Okita, S.Y.; Schwartz, D.L. Young children’s understanding of animacy and entertainment robots. Int. J. Hum. Robot. 2006, 3, 393–412. [Google Scholar] [CrossRef]
- Ihamäki, P.; Heljakka, K. Robot Dog Intervention with the Golden Pup: Activating Social and Empathy Experiences of Elderly People as Part of Intergenerational Interaction. In Proceedings of the 54th Hawaii International Conference on System Sciences, Kauai, HI, USA, 5–8 January 2021; p. 1888. [Google Scholar]
- Leite, I.; Martinho, C.; Paiva, A. Social Robots for Long-Term Interaction: A Survey. Int. J. Soc. Robot. 2013, 5, 291–308. [Google Scholar] [CrossRef]
- Melson, G.F.; Kahn, P.H.; Beck, A.M.; Friedman, B.; Roberts, T.; Garrett, E. Robots as dogs? Children’s interactions with the robotic dog AIBO and a live Australian shepherd. In CHI ’05 Extended Abstracts on Human Factors in Computing Systems, Portland, OR, USA, 2–7 April 2005; Association for Computing Machinery: New York, NY, USA, 2005; pp. 1649–1652. [Google Scholar]
- Bartlett, B.; Estivill-Castro, V.; Seymon, S. Dogs or Robots—Why do Children See Them As Robotic Pets Rather Than Canine Machines? In Proceedings of the AUIC, Dunedin, New Zealand, 18–22 January 2004. [Google Scholar]
- Sinatra, A.M.; Sims, V.K.; Chin, M.G.; Lum, H.C. If it looks like a dog: The effect of physical appearance on human interaction with robots and animals. Interact. Stud. 2012, 13, 235–262. [Google Scholar] [CrossRef]
- Francis, A.; Mishra, P. Is AIBO Real? Understanding Children’s Beliefs About and Behavioral Interactions with Anthropomorphic Toys. J. Interact. Learn. Res. 2009, 20, 405–422. [Google Scholar]
- Pepe, A.A.; Ellis, L.U.; Sims, V.K.; Chin, M.G. Go, Dog, Go: Maze Training AIBO vs. a Live Dog, An Exploratory Study. Anthrozoös 2008, 21, 71–83. [Google Scholar] [CrossRef]
- Konok, V.; Korcsok, B.; Miklósi, Á.; Gácsi, M. Should we love robots?—The most liked qualities of companion dogs and how they can be implemented in social robots. Comput. Hum. Behav. 2018, 80, 132–142. [Google Scholar] [CrossRef]
- Kertész, C.; Turunen, M. Exploratory analysis of Sony AIBO users. AI Soc. 2019, 34, 625–638. [Google Scholar] [CrossRef] [Green Version]
- Kubinyi, E.; Miklósi, Á.; Kaplan, F.; Gácsi, M.; Topál, J.; Csányi, V. Social behaviour of dogs encountering AIBO, an animal-like robot in a neutral and in a feeding situation. Behav. Processes 2004, 65, 231–239. [Google Scholar] [CrossRef] [PubMed]
- Donath, J. The robot dog fetches for whom? In A Networked Self and Human Augmentics, Artificial Intelligence, Sentience; Routledge: London, UK, 2018; pp. 10–24. [Google Scholar]
- Swift-Spong, K.; Wen, C.K.F.; Spruijt-Metz, D.; Matarić, M.J. Comparing backstories of a Socially Assistive Robot exercise buddy for adolescent youth. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 1013–1018. [Google Scholar]
- Kang, S.H.; Gratch, J. Socially anxious people reveal more personal information with virtual counselors that talk about themselves using intimate human back stories. Stud. Health Technol. Inform. 2012, 181, 202–206. [Google Scholar]
- Kang, S.H.; Gratch, J. People like virtual counselors that highly-disclose about themselves. Stud. Health Technol. Inform. 2011, 167, 143–148. [Google Scholar] [PubMed]
- Bickmore, T.W.; Schulman, D.; Yin, L. Engagement vs. Deceit: Virtual Humans with Human Autobiographies. In Proceedings of the IVA, Amsterdam, The Netherlands, 14–16 September 2009. [Google Scholar]
- Darling, K. ‘Who’s Johnny?’ Anthropomorphic Framing in Human-Robot Interaction, Integration, and Policy. In Robot Ethics 2.0: From Autonomous Cars to Artificial Intelligences; Lin, P., Abney, K., Jenkins, R., Eds.; Oxford University Press: Oxford, UK, 2015; Volume 2, Chapter 12. [Google Scholar]
- You, S.; Lionel, P.R., Jr. Human-Robot Similarity and Willingness to Work with a Robotic Co-worker. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 251–260. [Google Scholar]
- Lucas, G.M.; Boberg, J.; Traum, D.; Artstein, R.; Gratch, J.; Gainer, A.; Johnson, E.; Leuski, A.; Nakano, M. Getting to Know Each Other: The Role of Social Dialogue in Recovery from Errors in Social Robots. In Proceedings of the 2018 13th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Chicago, IL, USA, 5–8 March 2018; pp. 344–351. [Google Scholar]
- Thacker Thomas, D.; Vermilya, J.R. Framing ‘Friend’: Media Framing of ‘Man’s Best Friend’ and the Pattern of Police Shootings of Dogs. Soc. Sci. 2019, 8, 107. [Google Scholar] [CrossRef] [Green Version]
- Groom, V.; Srinivasan, V.; Bethel, C.L.; Murphy, R.; Dole, L.; Nass, C. Responses to robot social roles and social role framing. In Proceedings of the 2011 International Conference on Collaboration Technologies and Systems (CTS), Philadelphia, PA, USA, 23–27 May 2011; pp. 194–203. [Google Scholar]
- De Graaf, M.M.A.; Allouch, S.B. The Influence of Prior Expectations of a Robot’s Lifelikeness on Users’ Intentions to Treat a Zoomorphic Robot as a Companion. Int. J. Soc. Robot. 2017, 9, 17–32. [Google Scholar] [CrossRef] [Green Version]
- Mori, M.; MacDorman, K.F.; Kageki, N. The Uncanny Valley [From the Field]. IEEE Robot. Autom. Mag. 2012, 19, 98–100. [Google Scholar] [CrossRef]
- Stein, J.-P.; Liebold, B.; Ohler, P. Stay back, clever thing! Linking situational control and human uniqueness concerns to the aversion against autonomous technology. Comput. Hum. Behav. 2019, 95, 73–82. [Google Scholar] [CrossRef]
- Kim, B.; Bruce, M.; Brown, L.; Visser, E.d.; Phillips, E. A Comprehensive Approach to Validating the Uncanny Valley using the Anthropomorphic RoBOT (ABOT) Database. In Proceedings of the 2020 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 24 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Diel, A.; Weigelt, S.; Macdorman, K.F. A Meta-analysis of the Uncanny Valley’s Independent and Dependent Variables. J. Hum.-Robot Interact. 2021, 11, 1–33. [Google Scholar] [CrossRef]
- Löffler, D.; Dörrenbächer, J.; Hassenzahl, M. The Uncanny Valley Effect in Zoomorphic Robots: The U-Shaped Relation Between Animal Likeness and Likeability. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 261–270. [Google Scholar]
- Phillips, E.; Zhao, X.; Ullman, D.; Malle, B.F. What is Human-like? Decomposing Robots’ Human-like Appearance Using the Anthropomorphic roBOT (ABOT) Database. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 105–113. [Google Scholar]
- Haring, K.S.; Watanabe, K.; Velonaki, M.; Tossell, C.C.; Finomore, V. FFAB—The Form Function Attribution Bias in Human-Robot Interaction. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 843–851. [Google Scholar] [CrossRef]
- Roesler, E.; Manzey, D.; Onnasch, L. A meta-analysis on the effectiveness of anthropomorphism in human-robot interaction. Sci. Robot. 2021, 6, eabj5425. [Google Scholar] [CrossRef] [PubMed]
- Onnasch, L.; Roesler, E. Anthropomorphizing Robots: The Effect of Framing in Human-Robot Collaboration. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Seattle, WA, USA, 28 October–1 November 2019; Volume 63, pp. 1311–1315. [Google Scholar] [CrossRef] [Green Version]
- Magnusson, M.S. Discovering hidden time patterns in behavior: T-patterns and their detection. Behav. Res. Methods Instrum. Comput. 2000, 32, 93–110. [Google Scholar] [CrossRef] [PubMed]
- Darling, K.; Nandy, P.; Breazeal, C. Empathic concern and the effect of stories in human-robot interaction. In Proceedings of the 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, 31 August–4 September 2015; pp. 770–775. [Google Scholar]
- Wen, J.; Stewart, A.; Billinghurst, M.; Tossell, C. Band of Brothers and Bolts: Caring About Your Robot Teammate. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1853–1858. [Google Scholar]
- Wen, J.; Stewart, A.; Billinghurst, M.; Dey, A.; Tossell, C.; Finomore, V. He who hesitates is lost (…in thoughts over a robot). In Proceedings of the Technology, Mind, and Society, Washington, DC, USA, 5–8 April 2018. Article 43. [Google Scholar]
- Borrie, A.; Jonsson, G.; Magnusson, M. Application of T-pattern detection and analysis in sports research. Metodol. De Las Cienc. Del Comport. 2001, 3, 215–226. [Google Scholar]
- Casarrubea, M.; Magnusson, M.S.; Anguera, M.T.; Jonsson, G.K.; Castañer, M.; Santangelo, A.; Palacino, M.; Aiello, S.; Faulisi, F.; Raso, G.; et al. T-pattern detection and analysis for the discovery of hidden features of behaviour. J. Neurosci. Methods 2018, 310, 24–32. [Google Scholar] [CrossRef] [PubMed]
- Magnusson, M.S. Hidden Real-Time Patterns in Intra- and Inter-Individual Behavior: Description and Detection. Eur. J. Psychol. Assess. 1996, 12, 112–123. [Google Scholar] [CrossRef]
- Magnusson, M.S. Why Search for Hidden Repeated Temporal Behavior Patterns: T-Pattern Analysis with Theme. Int. J. Clin. Pharmacol. Pharmacother. 2017, 2, 128. [Google Scholar] [CrossRef]
- Diel, A.; MacDorman, K.F. Creepy cats and strange high houses: Support for configural processing in testing predictions of nine uncanny valley theories. J. Vis. 2021, 21, 1. [Google Scholar] [CrossRef]
- Krueger, F.; McCabe, K.; Moll, J.; Kriegeskorte, N.; Zahn, R.; Strenziok, M.; Heinecke, A.; Grafman, J. Neural correlates of trust. Proc. Natl. Acad. Sci. USA 2007, 104, 20084–20089. [Google Scholar] [CrossRef] [Green Version]
- Krueger, F.; Meyer-Lindenberg, A. Toward a Model of Interpersonal Trust Drawn from Neuroscience, Psychology, and Economics. Trends Neurosci. 2019, 42, 92–101. [Google Scholar] [CrossRef]
- Lewicki, R.J.; Bunker, B.B. Developing and maintaining trust in work relationships. Trust. Organ. Front. Theory Res. 1996, 114, 139. [Google Scholar]
- De Graaf, M.M.A.; Allouch, S.B.; van Dijk, J. Why Do They Refuse to Use My Robot? Reasons for Non-Use Derived from a Long-Term Home Study. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 224–233. [Google Scholar]
- Morovitz, M.; Mueller, M.; Scheutz, M. Animal-robot interaction: The role of human likeness on the success of dog-robot interactions. In Proceedings of the 1st International Workshop on Vocal Interactivity in-and-between Humans, Animals and Robots (VIHAR), London, UK, 29–30 August 2017; pp. 22–26. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Command | Behavior |
|---|---|
| “Very Lovely Aibo” | Dances and barks as a song plays |
| “Sit Down” | Sits down in dog-like posture and pants |
| “Take a Picture” | Counts down and snaps a picture with a camera |
| “Sing a Song” | Strikes a sitting pose and sings a tune |
| “Come Here” | Turns and walks towards the speaker |
| “Happy Birthday” | Dances and barks as “Happy Birthday” song plays |
| “Let’s Pose” | Rolls over on belly and moves feet |
| “If You’re Happy and You Know it” | Dances and barks to the famous song |
| Aibo’s Behavior Units | Person’s Behavior Units |
|---|---|
| Wags Tail | Laughs |
| Rotates Body | Smiles |
| Rotates Head | Pets Aibo |
| Kneels | Praises Aibo |
| Sits | Relocates Aibo |
| Barks | Repeated Commands |
| Looks at Person | Looks at Aibo |
| Lays Down | |
| Pivots Back and Forth |
| Commands Issued | Overall (n = 29) | Robot (n = 11) | Puppy (n = 18) | No Fur (n = 15) | Fur (n = 14) |
|---|---|---|---|---|---|
| “Very Lovely Aibo” | 2.14 (0.26) | 2.19 (0.42) | 2.08 (0.31) | 2.52 (0.32) | 1.75 (0.41) |
| “Sit Down” | 3.46 (0.67) | 2.79 (1.08) | 4.13 (0.79) | 2.79 (1.05) | 4.21 (0.82) |
| “Take a Picture” | 2.07 (0.33) | 2.02 (0.53) | 2.12 (0.39) | 2.39 (0.41) | 1.75 (0.52) |
| “Sing a Song” | 3.28 (0.52) | 3.21 (0.85) | 3.35 (0.62) | 3.06 (0.65) | 3.5 (0.83) |
| “Come Here” *** | 9.08 (1.36) | 8.33 (2.20) | 9.83 (1.61) | 9.12 (1.68) | 9.04 (2.15) |
| “Happy Birthday” | 2.40 (0.52) | 1.88 (0.83) | 2.92 (0.61) | 2.79 (0.64) | 2.00 (0.81) |
| “Let’s Pose” | 2.05 (0.36) | 1.71 (0.45) | 2.38 (0.33) | 2.09 (0.34) | 2.00 (0.44) |
| “If You’re Happy and You Know it” | 2.02 (0.36) | 1.75 (0.58) | 2.29 (0.43) | 2.25 (0.45) | 1.79 (0.57) |
| Total | 27.20 (2.82) | 24.17 (4.55) | 30.24 (3.34) | 29.37 (3.48) | 25.04 (2.82) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Visser, E.J.; Topoglu, Y.; Joshi, S.; Krueger, F.; Phillips, E.; Gratch, J.; Tossell, C.C.; Ayaz, H. Designing Man’s New Best Friend: Enhancing Human-Robot Dog Interaction through Dog-Like Framing and Appearance. Sensors 2022, 22, 1287. https://doi.org/10.3390/s22031287
de Visser EJ, Topoglu Y, Joshi S, Krueger F, Phillips E, Gratch J, Tossell CC, Ayaz H. Designing Man’s New Best Friend: Enhancing Human-Robot Dog Interaction through Dog-Like Framing and Appearance. Sensors. 2022; 22(3):1287. https://doi.org/10.3390/s22031287
Chicago/Turabian Stylede Visser, Ewart J., Yigit Topoglu, Shawn Joshi, Frank Krueger, Elizabeth Phillips, Jonathan Gratch, Chad C. Tossell, and Hasan Ayaz. 2022. "Designing Man’s New Best Friend: Enhancing Human-Robot Dog Interaction through Dog-Like Framing and Appearance" Sensors 22, no. 3: 1287. https://doi.org/10.3390/s22031287