
A High-Performance Gamma Spectrometer for Unmanned Systems Based on Off-the-Shelf Components


 , ,
, ,  and
and
Abstract
:1. Introduction
1.1. Motivation
1.2. Radiological and Nuclear Threats
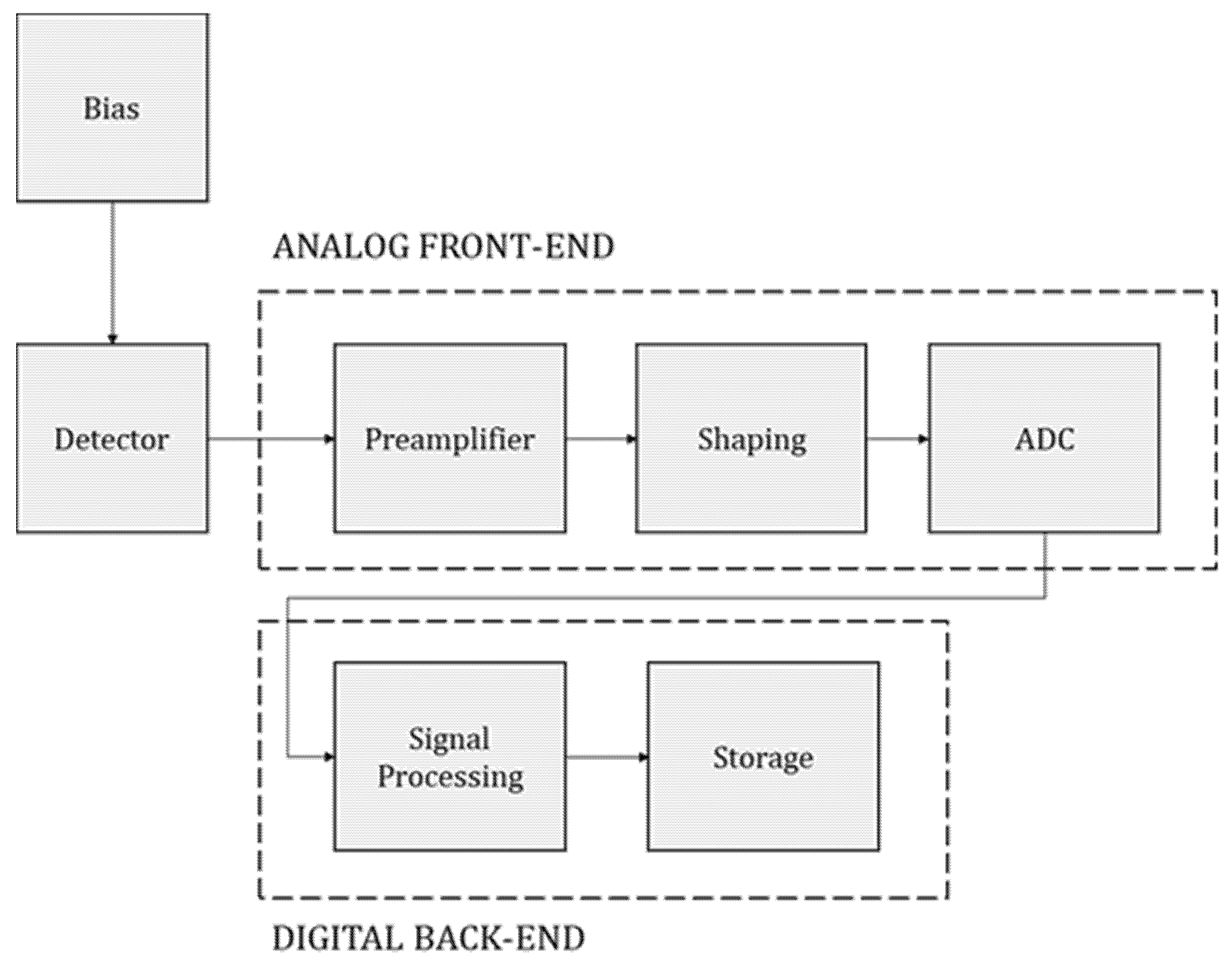
2. Materials and Methods
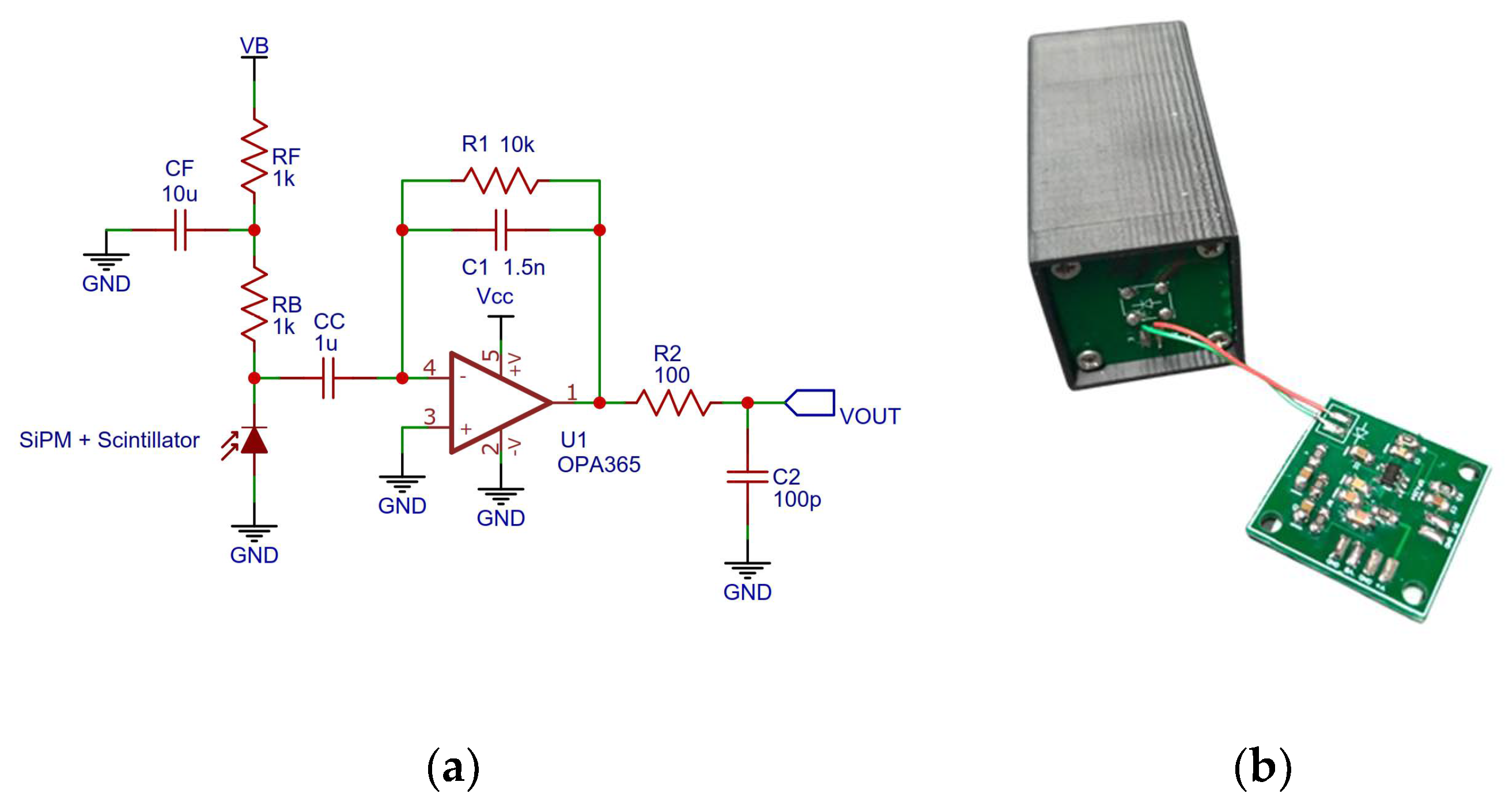
2.1. Scintillation Detector and Voltage Bias
2.2. Analog Readout
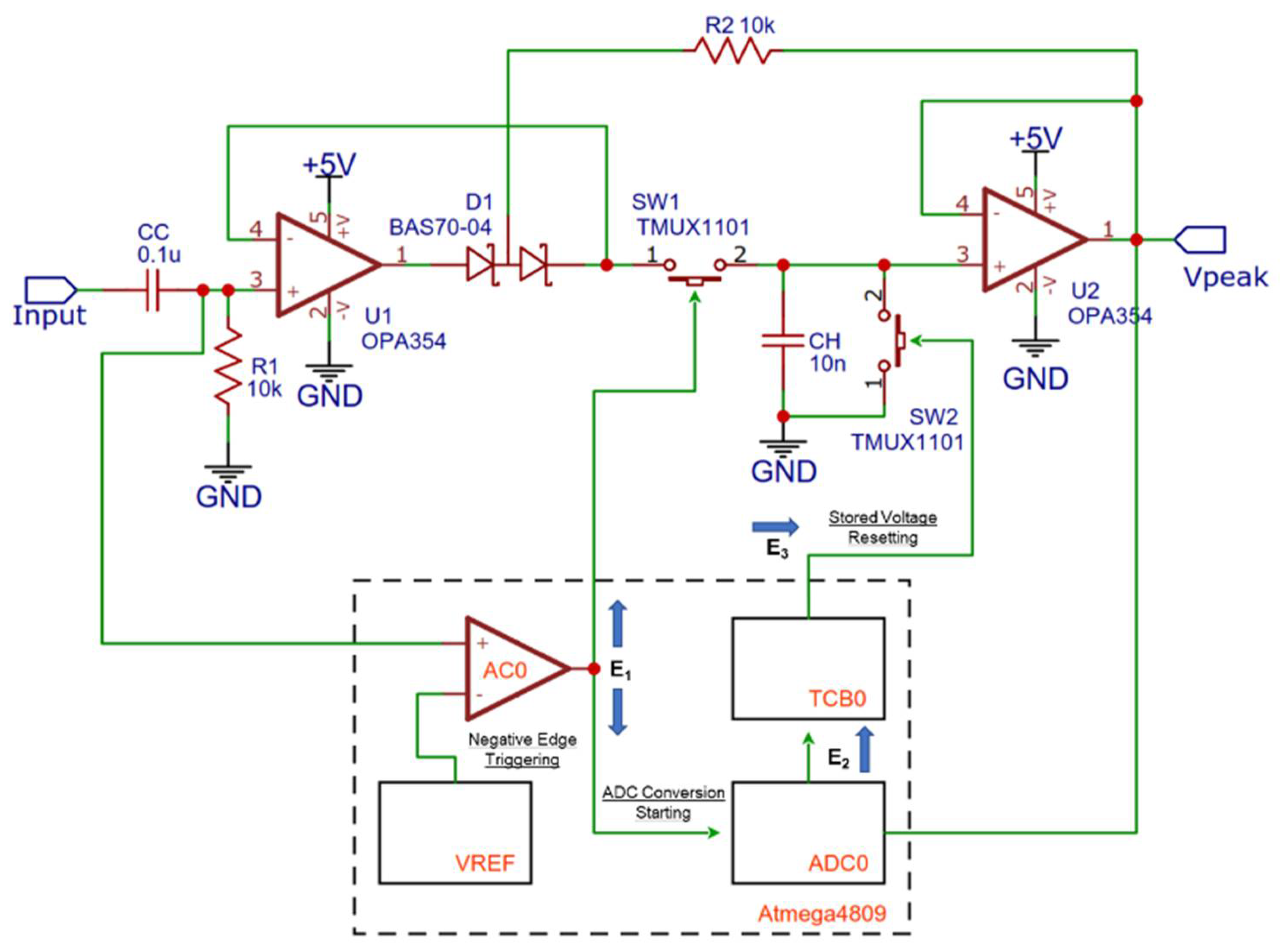
2.3. Multi-Channel Analyser Based on Peak Detection
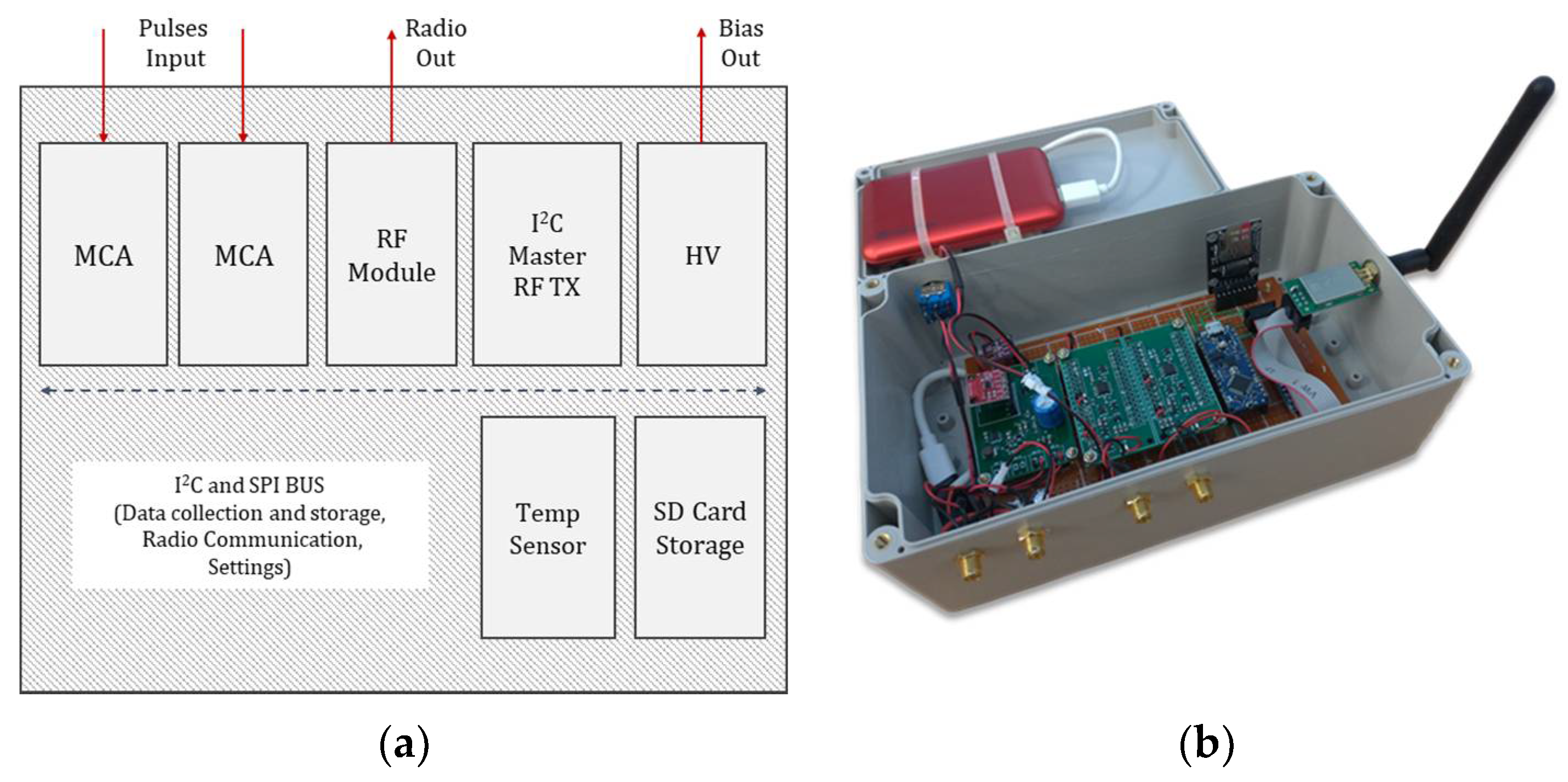
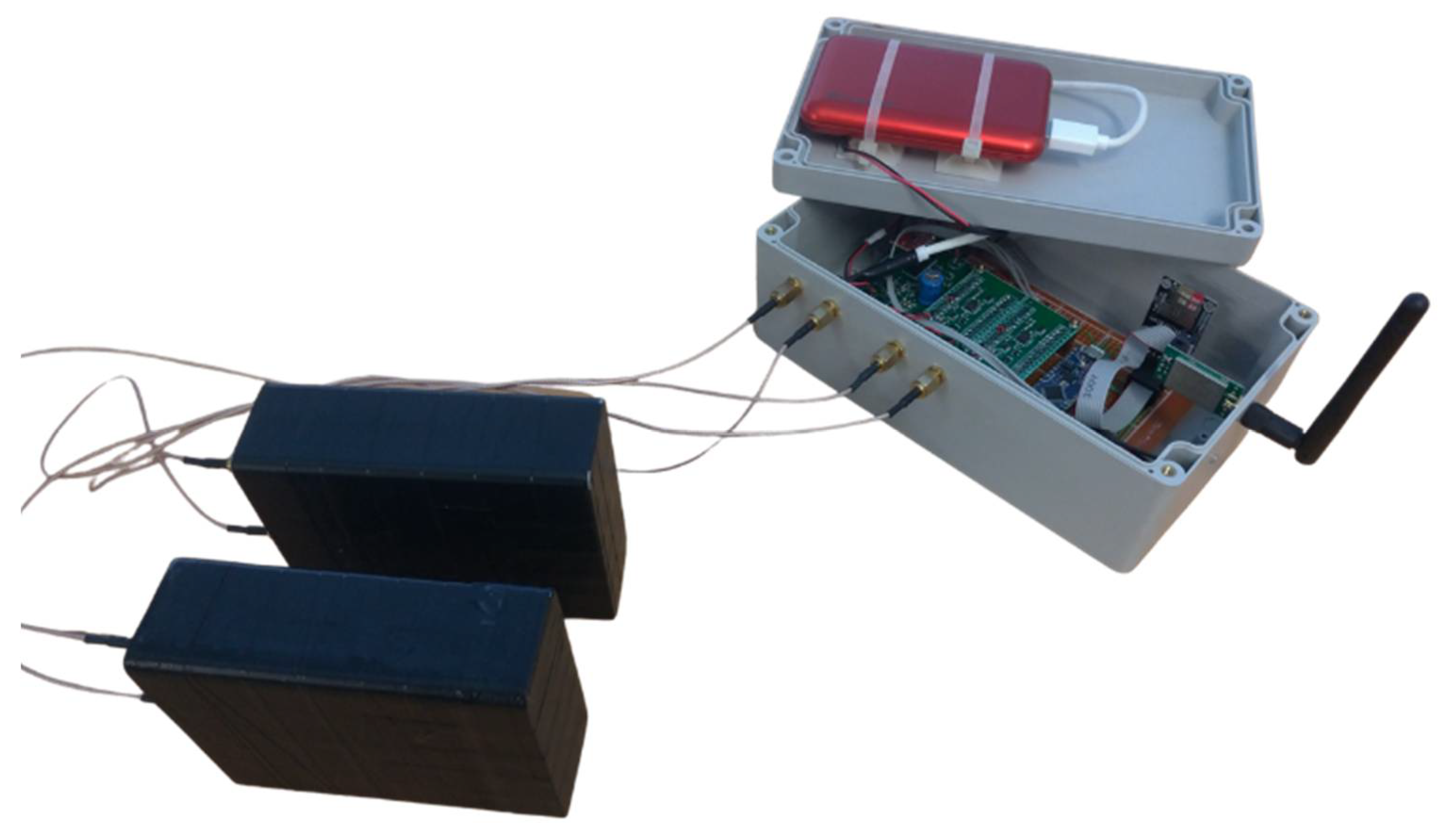
2.4. Master Unit, Other Modules, and Data Flow
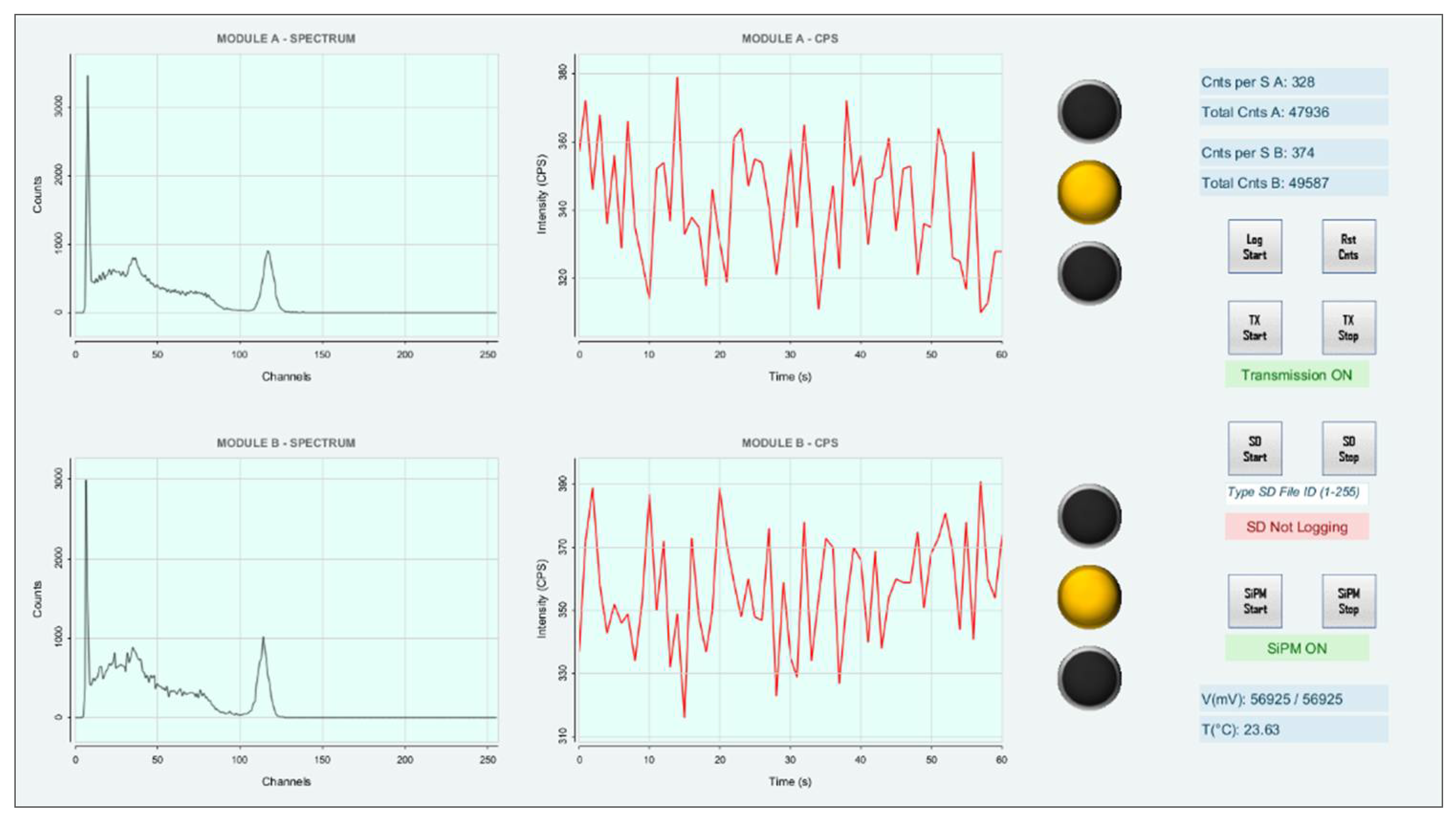
2.5. Graphical User Interface
3. Results and Discussion
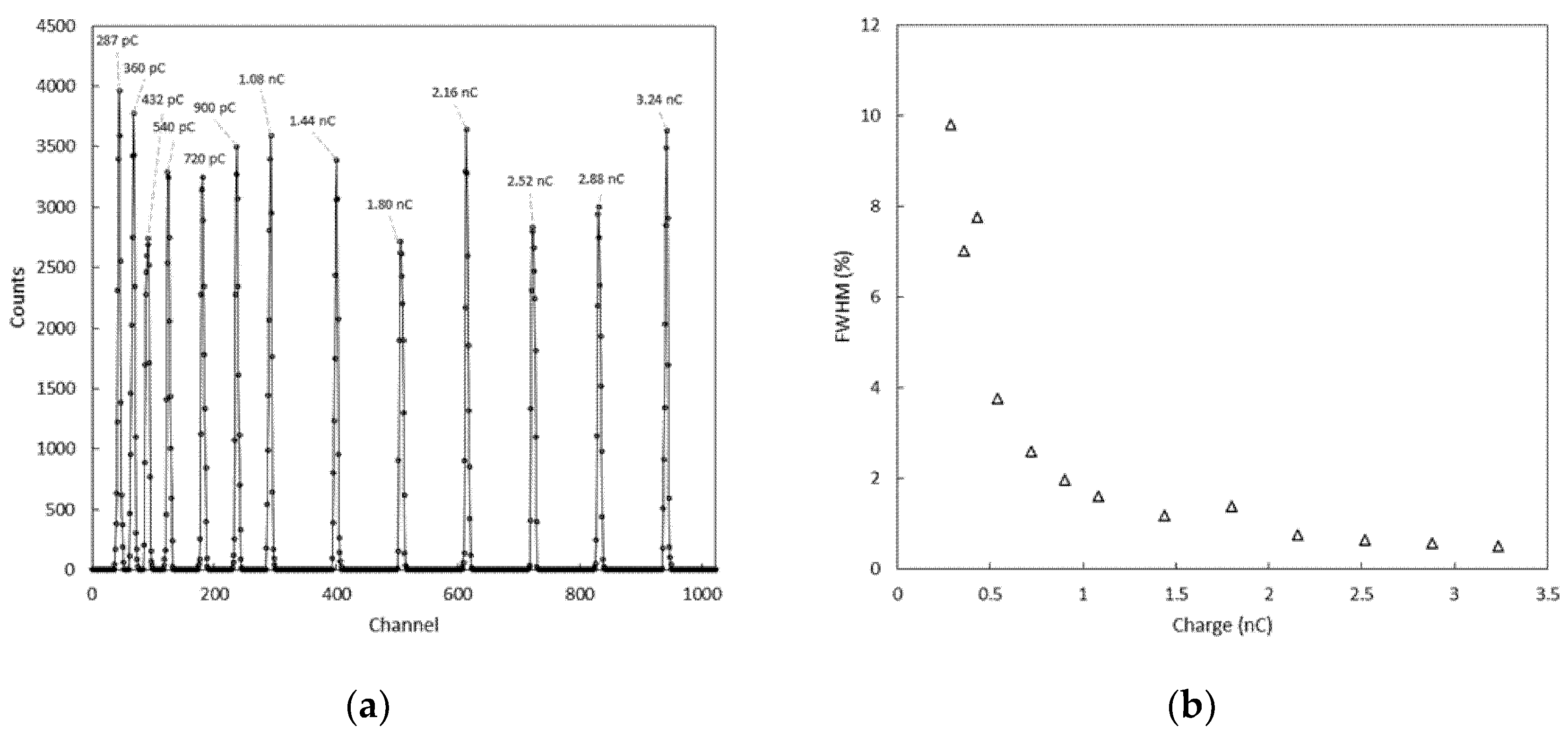
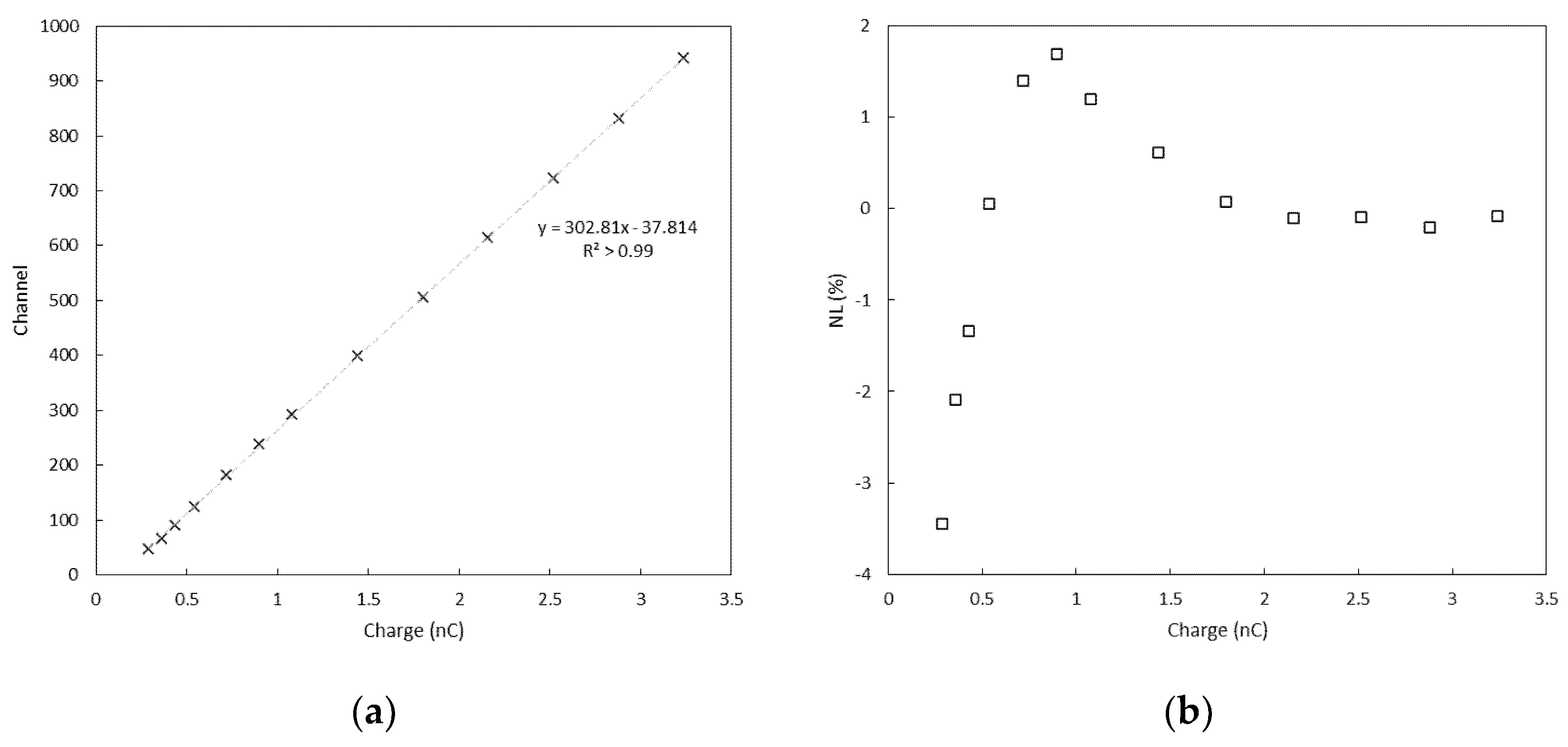
3.1. Linearity and Electronic Noise Measurements
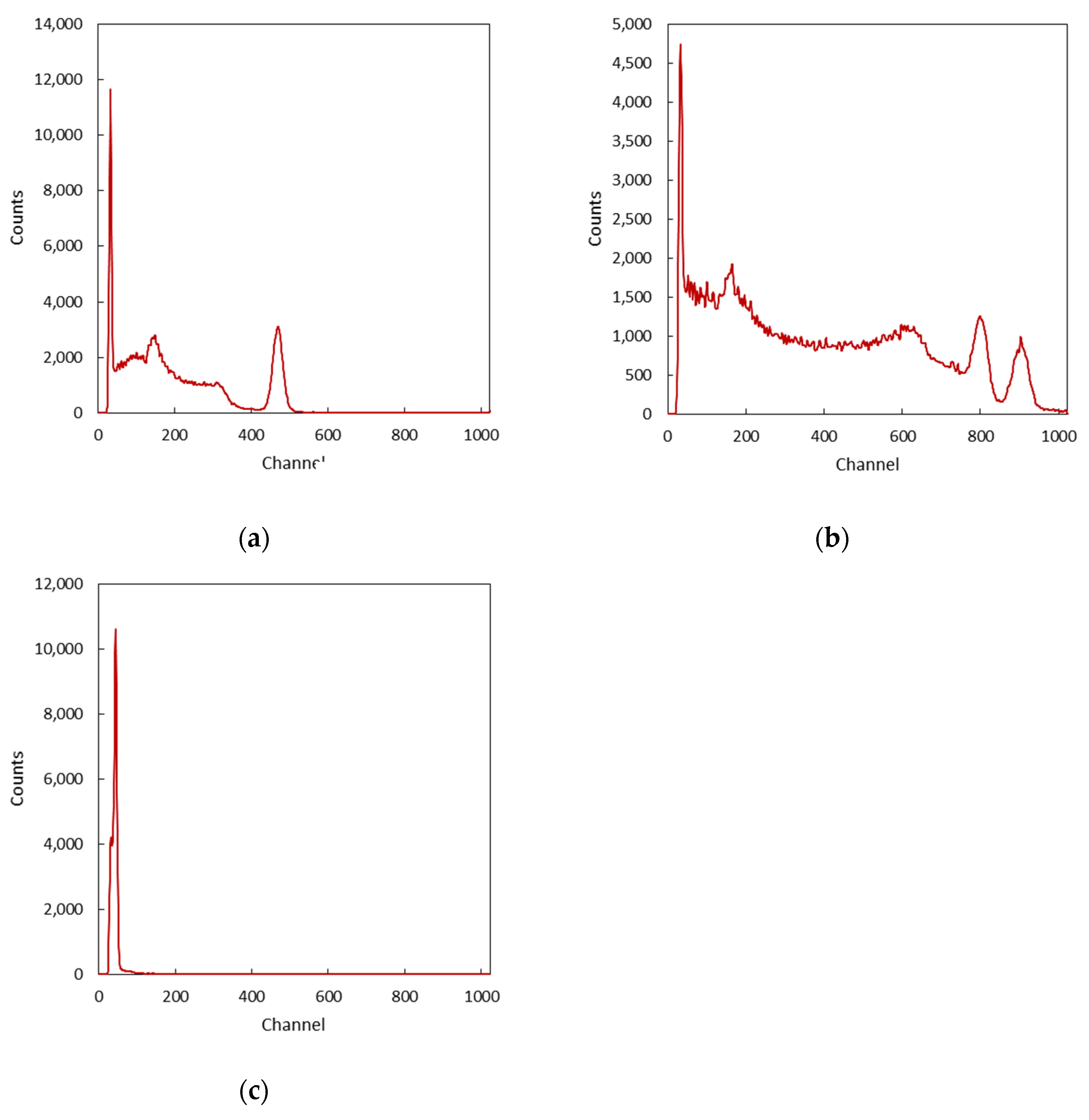
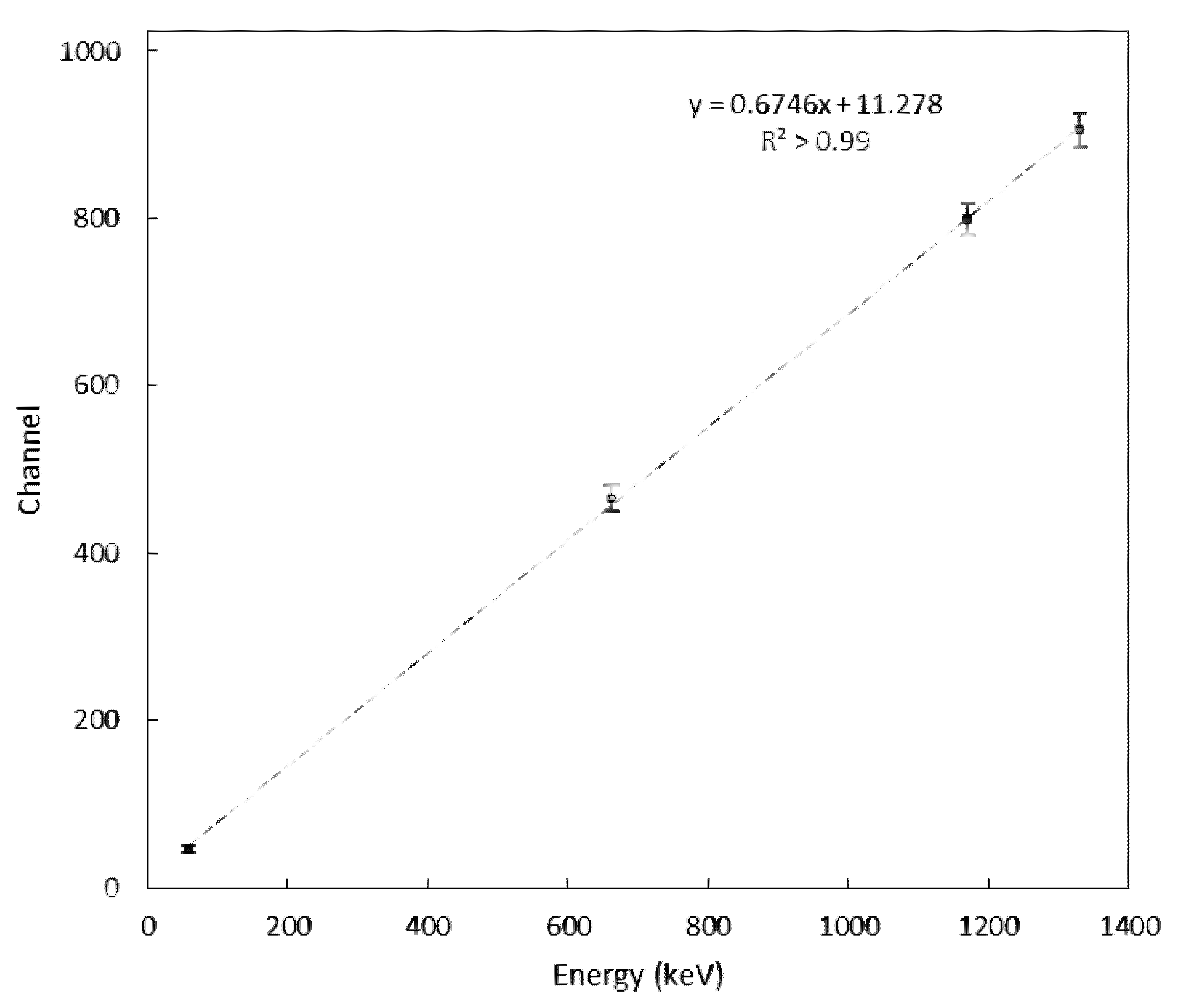
3.2. Energy Calibration
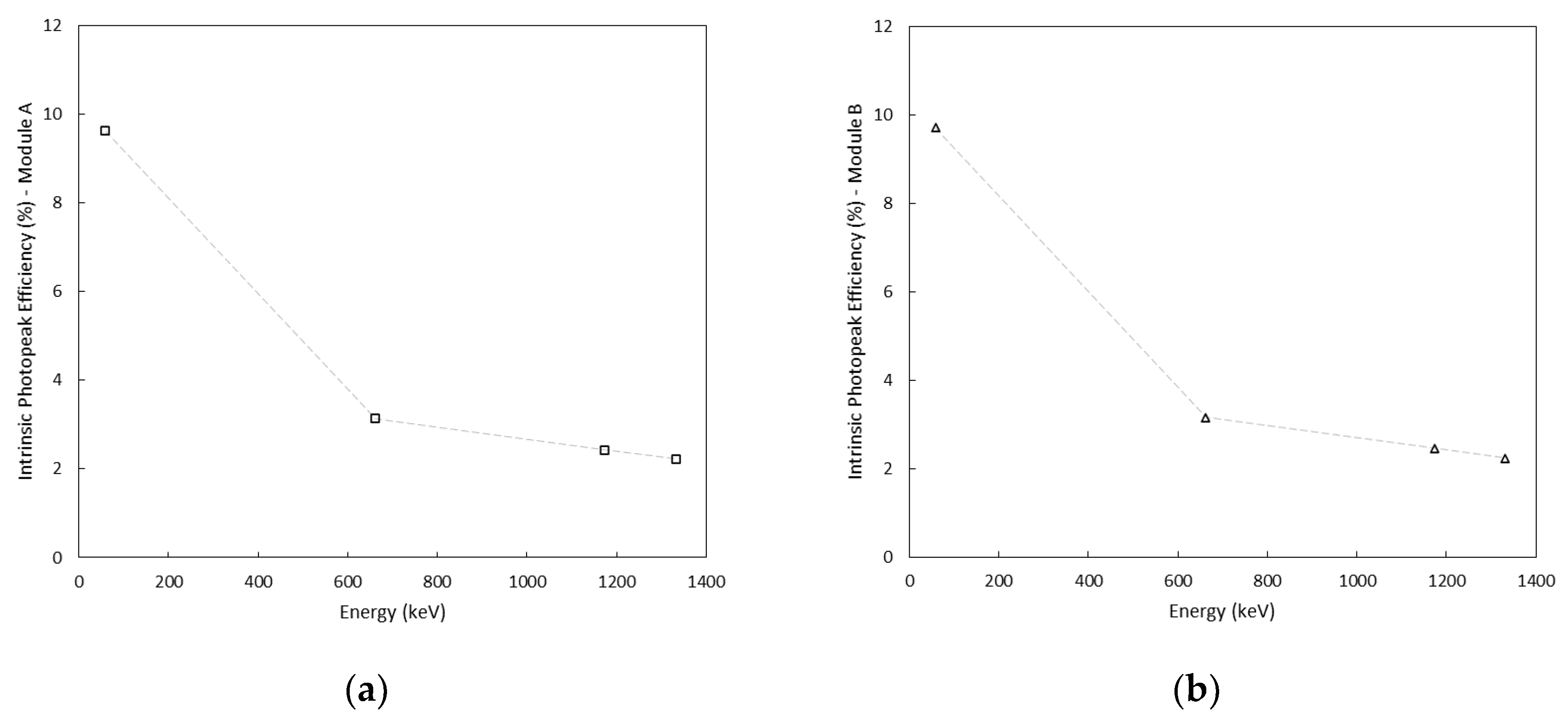
3.3. Photopeak Efficiency
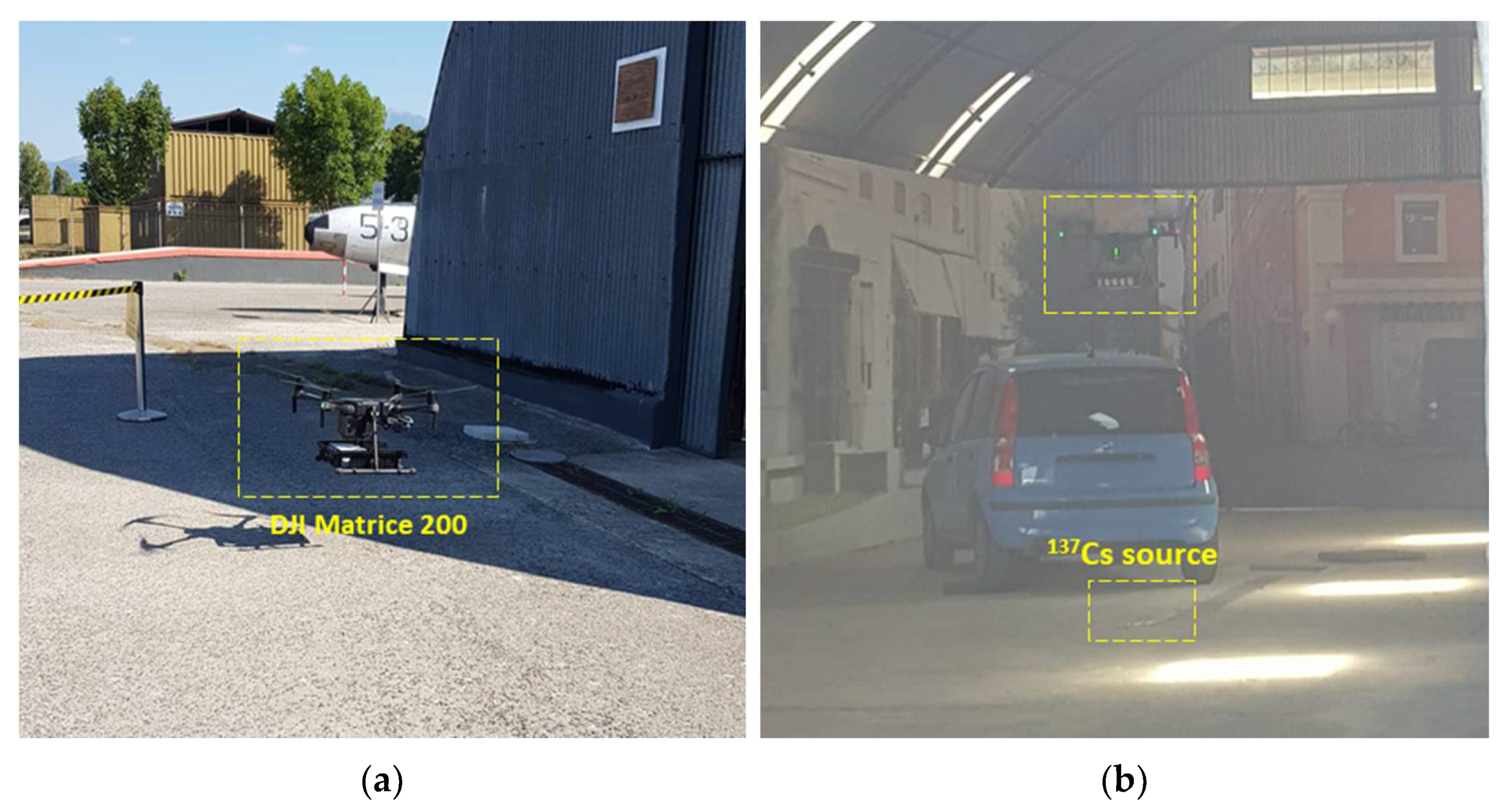
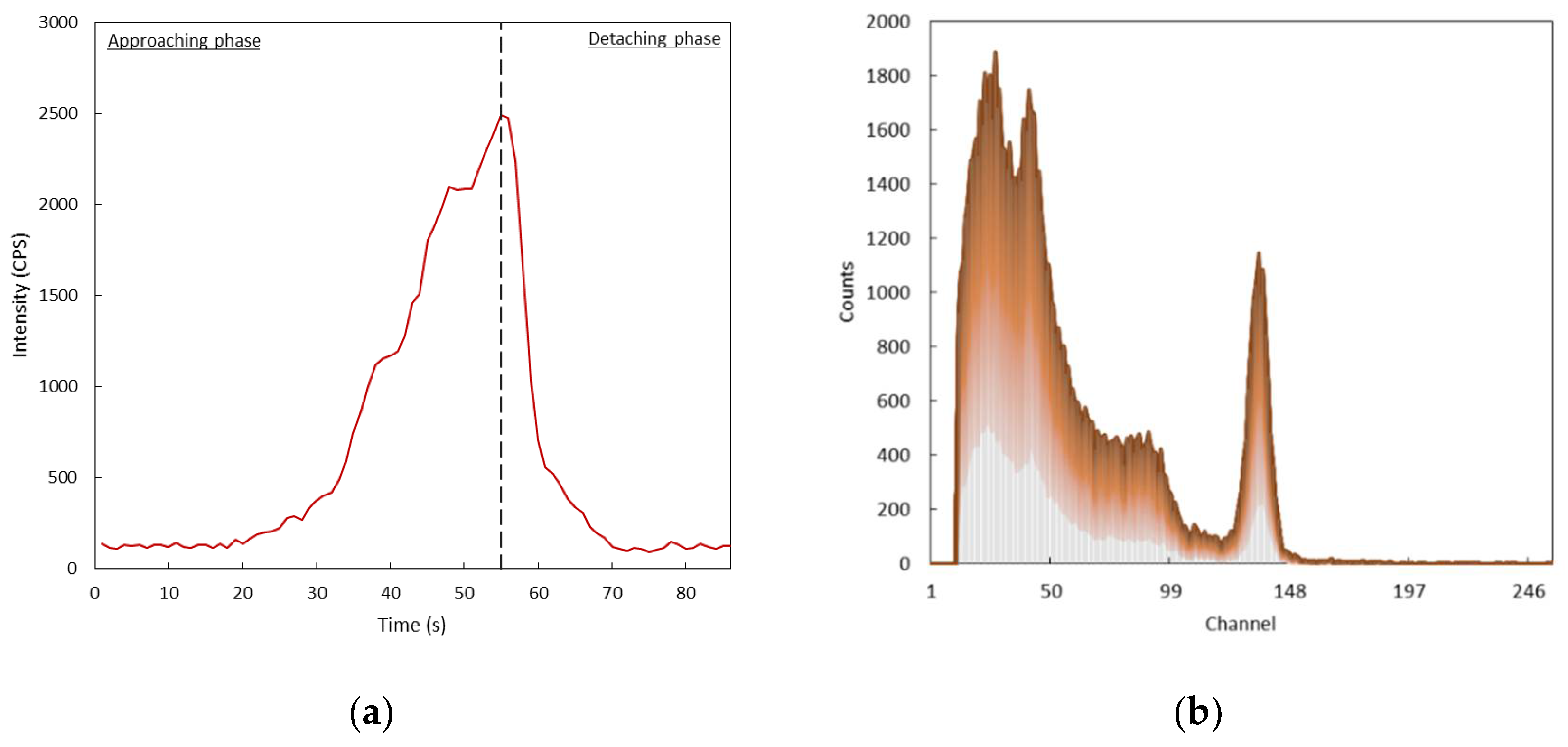
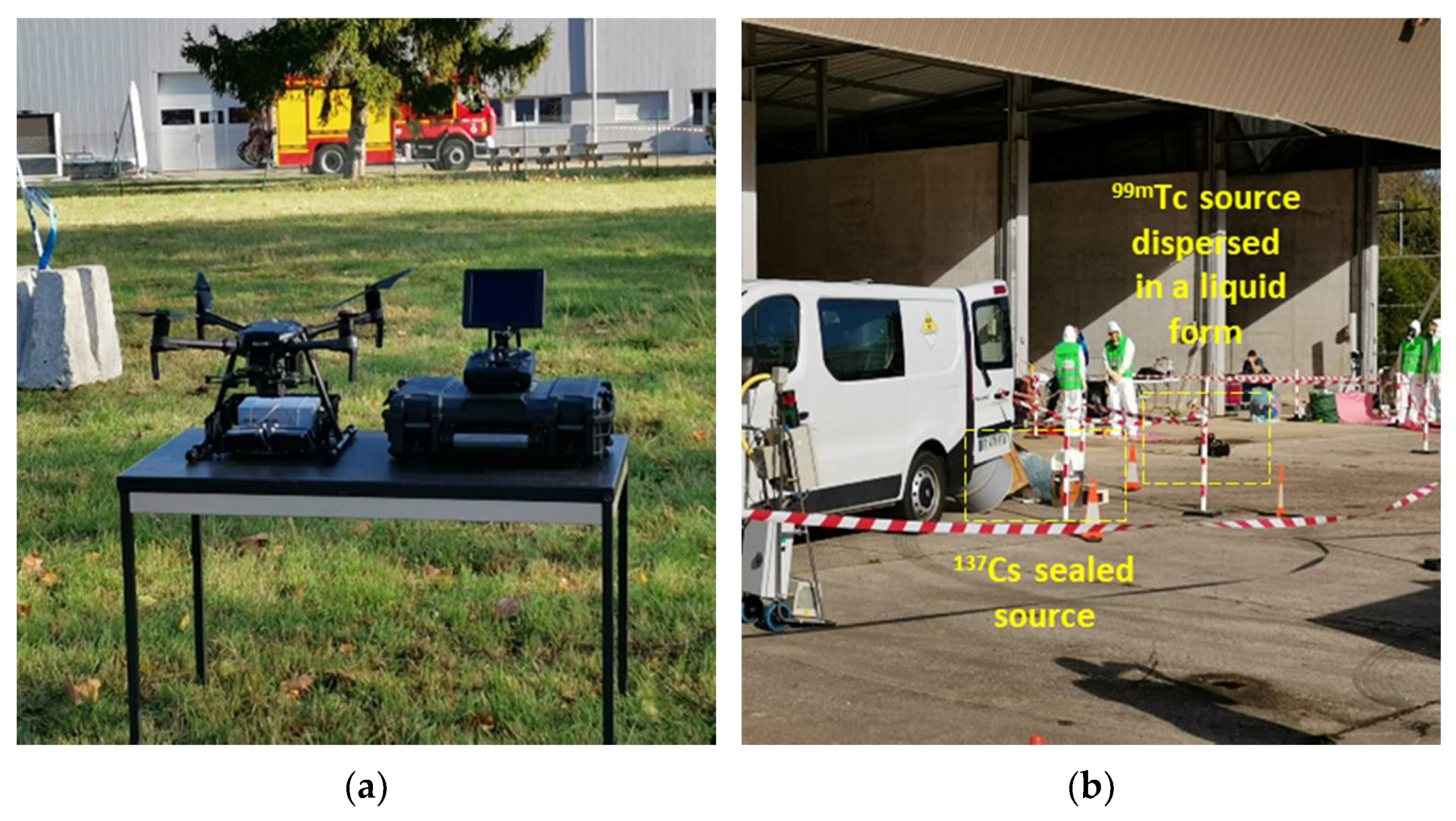
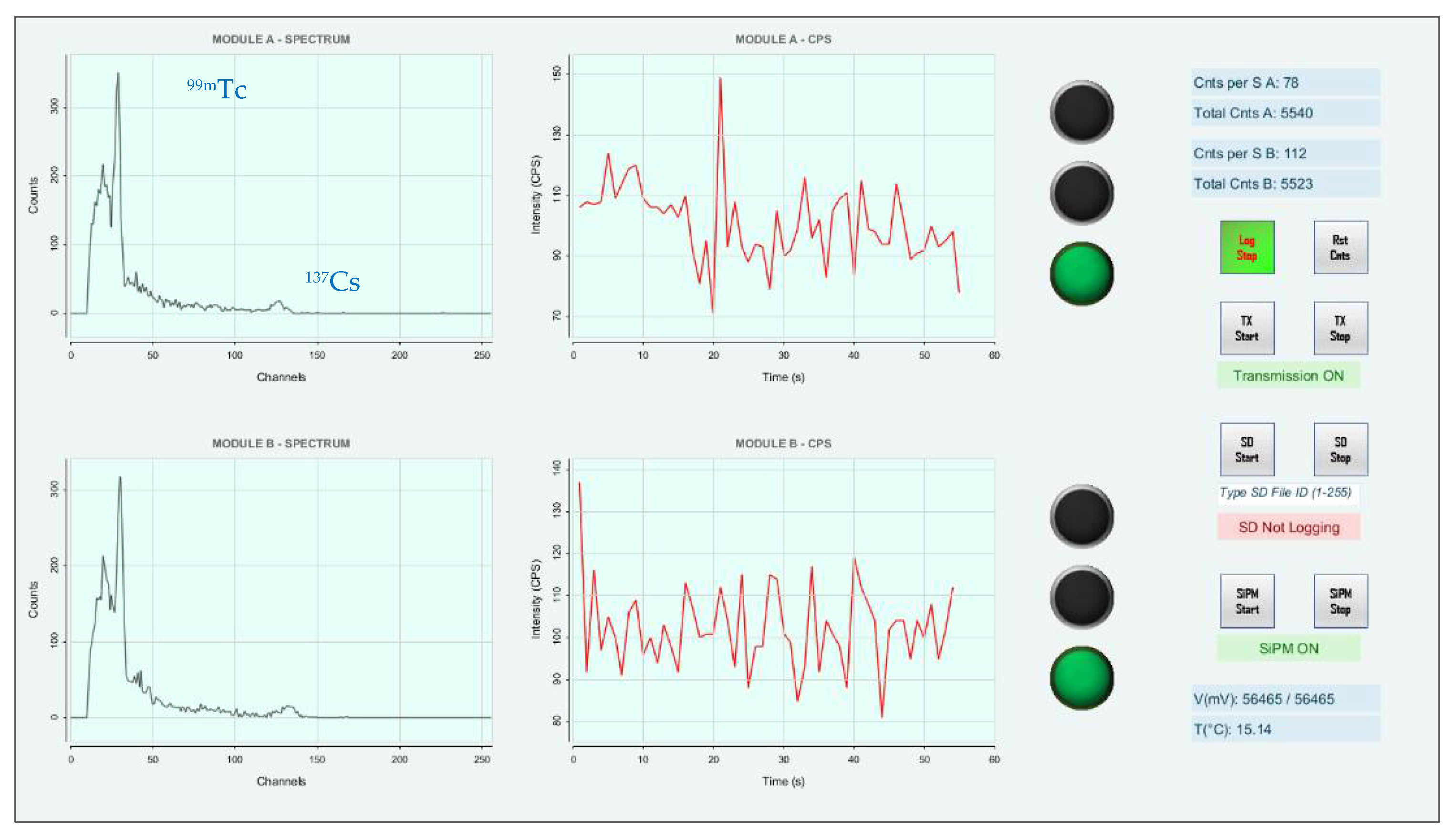
3.4. In Flight Testing
- Assess the potential sensitivity of the front end to EMI and to the vibrational (microphonic) noise generated by the engines and propellers of the UAV;
- Assess the capability of the detection system to correctly identify the hotspot of the radioactive field and the nature of the radioactive source.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fumian, F.; Chierici, A.; Bianchelli, M. Development and performance testing of a miniaturized multi-sensor system combining MOX and PID for potential UAV application in TIC, VOC and CWA dispersion scenarios. Eur. Phys. J. Plus 2021, 136, 913. [Google Scholar] [CrossRef]
- Martellucci, L.; Chierici, A.; Di Giovanni, D.; Fumian, F.; Malizia, A.; Gaudio, P. Drones and Sensors Ecosystem to Maximise the “Storm Effects” in Case of CBRNe Dispersion in Large Geographic Areas. Int. J. Saf. Secur. Eng. 2021, 11, 377–386. [Google Scholar] [CrossRef]
- Di Giovanni, D.; Fumian, F.; Chierici, A.; Bianchelli, M.; Martellucci, L.; Carminati, G.; Malizia, A.; D’Errico, F.; Gaudio, P. Design of Miniaturized Sensors for a Mission-Oriented UAV Application: A New Pathway for Early Warning. Int. J. Saf. Secur. Eng. 2021, 11, 435–444. [Google Scholar] [CrossRef]
- Murphy, R.R. Disaster Robotics; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Connor, D.; Martin, P.G.; Scott, T.B. Airborne radiation mapping: Overview and application of current and future aerial systems. Int. J. Remote Sens. 2016, 37, 5953–5987. [Google Scholar] [CrossRef]
- Duncan, B.A.; Murphy, R.R. Autonomous Capabilities for Small Unmanned Aerial Systems Conducting Radiological Response: Findings from a High-fidelity Discovery Experiment. J. Field Robot. 2014, 31, 522–536. [Google Scholar] [CrossRef] [Green Version]
- Towler, J.; Krawiec, B.; Kochersberger, K. Radiation Mapping in Post-Disaster Environments Using an Autonomous Helicopter. Remote Sens. 2012, 4, 1995–2015. [Google Scholar] [CrossRef] [Green Version]
- Chierici, A.; Malizia, A.; di Giovanni, D.; Fumian, F.; Martellucci, L.; Gaudio, P.; D’Errico, F. A low-cost radiation detection system to monitor radioactive environments by unmanned vehicles. Eur. Phys. J. Plus 2021, 136, 314. [Google Scholar] [CrossRef]
- Haddal, C.C.; Gertler, J. Homeland Security: Unmanned Aerial Vehicles and Border Surveillance, 2nd ed.; Library of Congress Washington DC Congressional Research Service: Washington, DC, USA, 2010. [Google Scholar]
- Bolkcom, C. Homeland Security: Unmanned Aerial Vehicles and Border Surveillance; Library of Congress Washington DC Congressional Research Service: Washington, DC, USA, 2004. [Google Scholar]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field. J. Intell. Robot. Syst. 2012, 70, 401–410. [Google Scholar] [CrossRef]
- Łukasiewicz, J. Unmanned aerial vehicle as a device supporting the physical protection system of critical infrastructure facilities: Nuclear power plant as a case in point. Zesz. Naukowe. Transp. Politech. Śląska 2020, 108, 121–131. [Google Scholar] [CrossRef]
- Martin, P.G.; Moore, J.; Fardoulis, J.S.; Payton, O.D.; Scott, T.B. Radiological Assessment on Interest Areas on the Sellafield Nuclear Site via Unmanned Aerial Vehicle. Remote Sens. 2016, 8, 913. [Google Scholar] [CrossRef] [Green Version]
- Pöllänen, R.; Toivonen, H.; Peräjärvi, K.; Karhunen, T.; Ilander, T.; Lehtinen, J.; Rintala, K.; Katajainen, T.; Niemelä, J.; Juusela, M. Radiation surveillance using an unmanned aerial vehicle. Appl. Radiat. Isot. 2008, 67, 340–344. [Google Scholar] [CrossRef]
- Kumar, K.P.; Sundaram, G.S.; Sharma, B.K.; Venkatesh, S.; Thiruvengadathan, R. Advances in gamma radiation detection systems for emergency radiation monitoring. Nucl. Eng. Technol. 2020, 52, 2151–2161. [Google Scholar] [CrossRef]
- Vaz, P. Radiological protection, safety and security issues in the industrial and medical applications of radiation sources. Radiat. Phys. Chem. 2015, 116, 48–55. [Google Scholar] [CrossRef]
- Shina, H.; Kimb, J. Development of realistic RDD scenarios and their radiological consequence analyses. Appl. Radiat. Isot. 2009, 67, 1516–1520. [Google Scholar] [CrossRef] [PubMed]
- Buddemeier, B.; Suski, N. Improvised nuclear device case study: An analytic framework for disaster management. In Proceedings of the IEEE International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 15–17 November 2011; pp. 190–195. [Google Scholar] [CrossRef]
- World Nuclear Association. Uranium Mining Overview. February 2019. Available online: https://www.world-nuclear.org/information-library/nuclear-fuel%20cycle/uranium-resources/uranium-and-depleted-uranium.aspx (accessed on 19 December 2021).
- Anderson, M.E.; Lemming, J.F. Selected Measurement Data for Plutonium and Uranium; Monsanto Research Corp., Mound Facility: Miamisburg, OH, USA, 1982. [Google Scholar]
- D’Errico, F.; Felici, G.; Chierici, A.; Zagarella, R. Detection of special nuclear material with a transportable active interrogation system. Eur. Phys. J. Plus 2018, 133, 451. [Google Scholar] [CrossRef]
- Alves, A.V.S.; D’Errico, F. Simulation of an active interrogation system for the interdiction of special nuclear materials. Eur. Phys. J. Plus 2021, 136, 995. [Google Scholar] [CrossRef]
- Bendahan, J. Review of active interrogation techniques. Nucl. Instrum. Meth. Phys. Res. Sec. A Accelerat. Spectrom. Detect. Assoc. Equip. 2020, 954, 161120. [Google Scholar] [CrossRef]
- Dodd, B.; McKenna, T.; Wheatley, J. Categorization of Radioactive Sources; Division of Radiation and Waste Safety, IAEA: Vienna, Austria, 2003. [Google Scholar]
- Reynolds, S.A. Theoretical and Practical Specific Activities and Other Properties of Common Radionuclides. January 1973. Available online: https://www.osti.gov/servlets/purl/4535530/ (accessed on 19 December 2021).
- Knoll, G.F. Radiation Detection and Measurement, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Saint-Gobain, Scintillation Crystal Materials. Available online: https://www.crystals.saint-gobain.com/products/crystal-scintillation-materials (accessed on 19 December 2021).
- Crystal, E. Scintillator Detectors. Available online: http://www.epic-crystal.com/others/nai-tl-scintillator-detectors (accessed on 19 December 2021).
- Saint-Gobain Crystal. Assembly Materials. Available online: https://www.crystals.saint-gobain.com/radiation-detection-scintillators/assembly-materials (accessed on 21 January 2022).
- Texas Instruments. OPA354 Datasheet. Available online: https://www.ti.com/lit/ds/symlink/opa354.pdf?ts=1642757621624&ref_url=https%253A%252F%252Fwww.ti.com%252Fproduct%252FOPA354 (accessed on 9 January 2022).
- Texas Instruments. OPA365 Datasheet. Available online: https://www.ti.com/lit/ds/symlink/opa365.pdf (accessed on 9 January 2022).
- Texas Instruments. TMUX1101 Datasheet. Available online: https://www.ti.com/lit/ds/symlink/tmux1101.pdf?ts=1642757707245&ref_url=https%253A%252F%252Fwww.ti.com%252Fproduct%252FTMUX1101 (accessed on 9 January 2022).
- Microchip. Atmega4809 Datasheet. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/ATmega4808-09-DataSheet-DS40002173C.pdf (accessed on 9 January 2022).
- Nordic Semiconductor. nRF24-Series. Available online: https://www.nordicsemi.com/Products/nRF24-series (accessed on 9 January 2022).
- Bosch Sensortech. BME280 Datasheet. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bme280-ds002.pdf (accessed on 9 January 2022).
- Maxim Integrated. MAX5026 Datasheet. Available online: https://datasheets.maximintegrated.com/en/ds/MAX5025-MAX5028.pdf (accessed on 9 January 2022).
- Microchip. MCP4725 Datasheet. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/22039d.pdf (accessed on 9 January 2022).
- Texas Instruments. REF5050 Datasheet. Available online: https://www.ti.com/lit/ds/symlink/ref5050-ep.pdf?ts=1642688727476&ref_url=https%253A%252F%252Fwww.ti.com%252Fproduct%252FREF5050-EP (accessed on 9 January 2022).
- Microchip. SAM D21 Datasheet. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/SAM-D21DA1-Family-Data-Sheet-DS40001882G.pdf (accessed on 9 January 2022).
- Dorenbos, P.; de Haas, J.; van Eijk, C. Non-proportionality in the scintillation response and the energy resolution obtainable with scintillation crystals. IEEE Trans. Nucl. Sci. 1995, 42, 2190–2202. [Google Scholar] [CrossRef] [Green Version]
- Moses, W.W.; Bizarri, G.; Williams, R.T.; Payne, S.A.; Vasil’Ev, A.; Singh, J.; Li, Q.; Grim, J.Q.; Choong, W.-S. The Origins of Scintillator Non-Proportionality. IEEE Trans. Nucl. Sci. 2012, 59, 2038–2044. [Google Scholar] [CrossRef]
- QGIS Un Sistema di Informazione Geografica Libero e Open Source. Available online: https://www.qgis.org/it/site/ (accessed on 19 December 2021).
- Adafruit. Adafruit Ultimate GPS. Available online: https://cdn-learn.adafruit.com/downloads/pdf/adafruit-ultimate-gps.pdf (accessed on 19 December 2021).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | DAQ and RF Unit | Detection Unit |
|---|---|---|
| Weight (g) | <400 | <200 |
| Size (mm3) | 220 × 110 × 80 | 110 × 80 × 38 |
| Power Consumption (mA) | <250 | <5 |
| Cost (euro) | <250 | <300 |
| E (keV) | Measured Channel | FWHM (Channels) | Energy Resolution (%) | Predicted Channel (Linear Fit) | NL (%) |
|---|---|---|---|---|---|
| 59 | 47 | 8 | 17.0 | 49 | −4.0 |
| 662 | 465 | 30 | 6.5 | 457 | 1.7 |
| 1173 | 801 | 40 | 5.0 | 803 | −0.2 |
| 1332 | 909 | 40 | 4.4 | 910 | −0.2 |
| Emitter | Activity (MBq) | Distance (m) | Exposure Time (min) |
|---|---|---|---|
| 241Am | 5350 | 5 | 1 |
| 137Cs | 782 | 3 | 10 |
| 60Co | 110 | 1.7 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chierici, A.; Malizia, A.; Di Giovanni, D.; Ciolini, R.; d’Errico, F. A High-Performance Gamma Spectrometer for Unmanned Systems Based on Off-the-Shelf Components. Sensors 2022, 22, 1078. https://doi.org/10.3390/s22031078
Chierici A, Malizia A, Di Giovanni D, Ciolini R, d’Errico F. A High-Performance Gamma Spectrometer for Unmanned Systems Based on Off-the-Shelf Components. Sensors. 2022; 22(3):1078. https://doi.org/10.3390/s22031078
Chicago/Turabian StyleChierici, Andrea, Andrea Malizia, Daniele Di Giovanni, Riccardo Ciolini, and Francesco d’Errico. 2022. "A High-Performance Gamma Spectrometer for Unmanned Systems Based on Off-the-Shelf Components" Sensors 22, no. 3: 1078. https://doi.org/10.3390/s22031078