
Global Consensus of High-Order Discrete-Time Multi-Agent Systems with Communication Delay and Saturation Constraint




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
3. Neutrally Stable Agent Model
3.1. Leaderless Case
3.2. Leader-Following Case
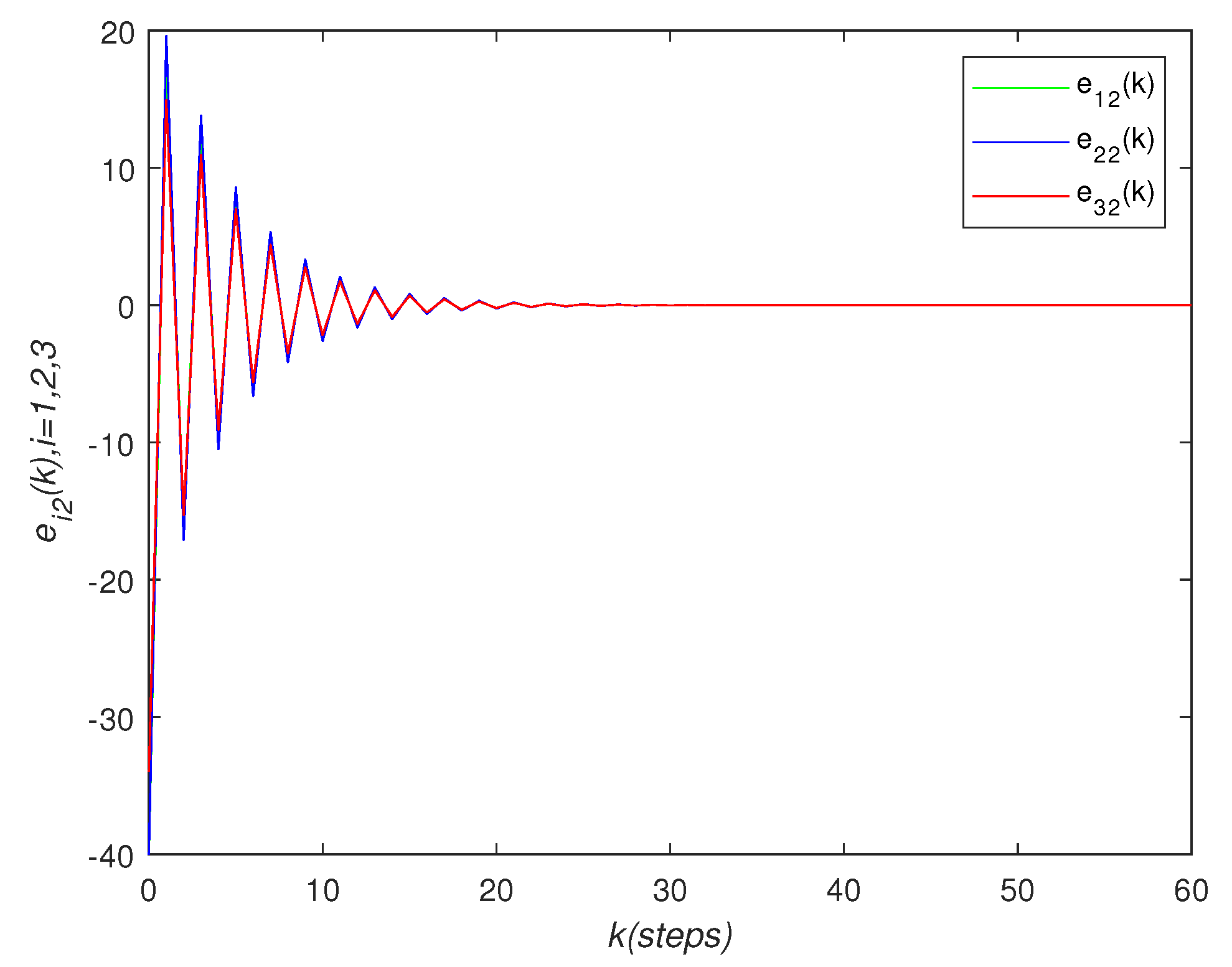
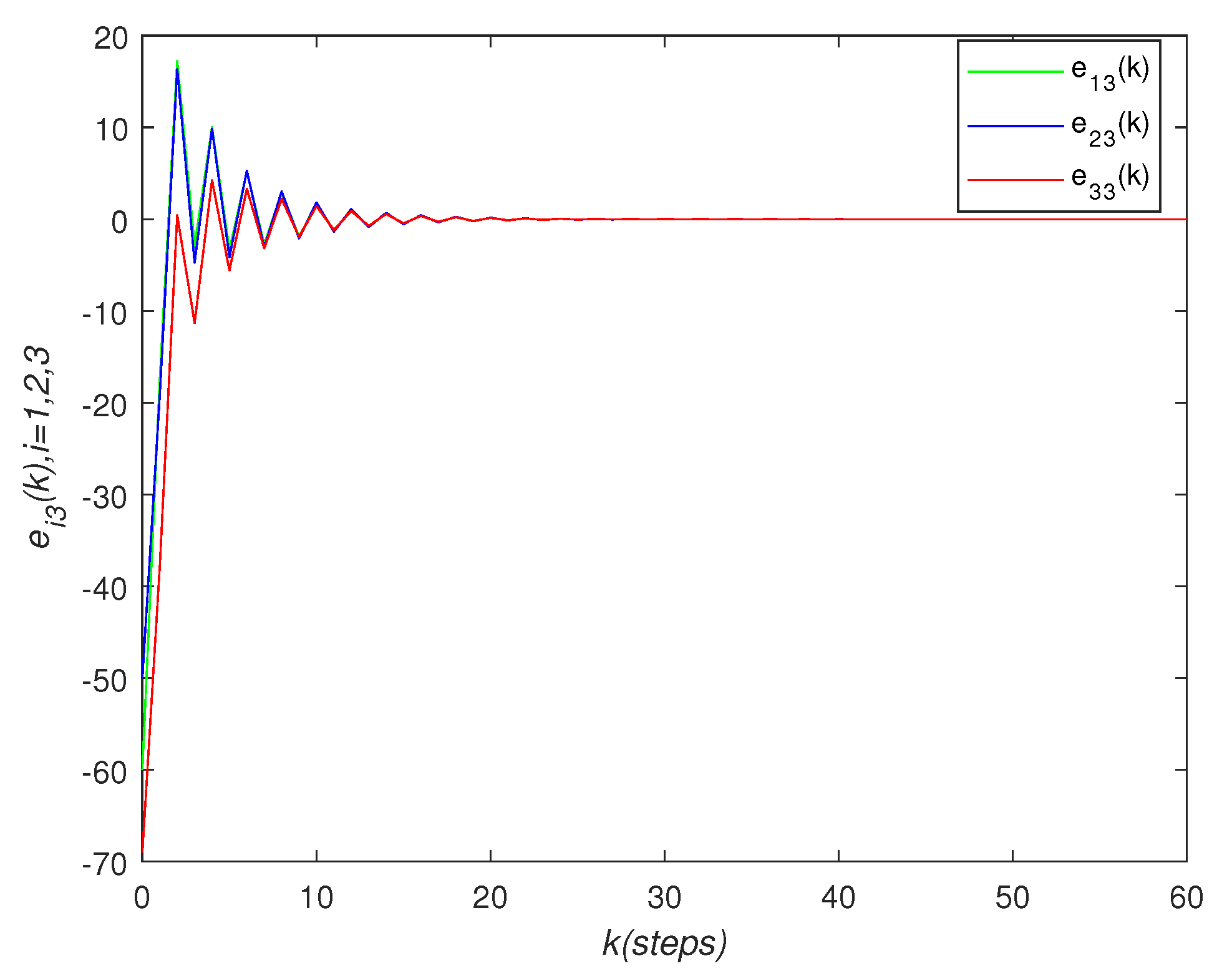
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 53, 1503–1509. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Deng, Z.; Hong, Y. Optimal output consensus of high-order multi-agent systems with embedded technique. IEEE Trans. Cybern. 2019, 49, 1768–1779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karagoz, C.S.; Bozma, H.I.; Kyriakopoulos, K.J.; Koditschek, D.E. Coordinated navigation of multiple independent disk-shaped robots. IEEE Trans. Robot. 2017, 30, 1289–1304. [Google Scholar] [CrossRef]
- Yoshi, D.K.; Fukushima, H.; Kon, K. Control of a group of mobile robots based on formation abstraction and decentralized locational optimization. IEEE Trans. Robot. 2017, 30, 550–565. [Google Scholar] [CrossRef]
- Lin, Z.L. Control design in the presence of actuator saturation: From individual systems to multi-agent systems. Sci. China 2019, 62, 191–193. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.J.; Wen, G.H.; Huang, T.W.; Duan, Z.S. Consensus of multi-agent systems with heterogeneous input saturation levels. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1053–1057. [Google Scholar] [CrossRef]
- Yi, X.L.; Yang, T.; Wu, J.F.; Johansson, K.H. Distributed event-triggered control for global consensus of multi-agent systems with input saturation. Automatica 2017, 100, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Meng, Z.Y.; Zhao, Z.Y.; Lin, Z.L. On global leader-following consensus of identical linear dynamic systems subject to actuator saturation. Syst. Control Lett. 2013, 62, 132–142. [Google Scholar] [CrossRef]
- Zhang, Z.C.; Zuo, Z.Q.; Wang, Y.J. Finite-time consensus of neutrally stable multi-agent systems in the presence of input saturation. J. Frankl. Inst. 2018, 356, 894–907. [Google Scholar] [CrossRef]
- Lv, Y.; Fu, J.; Wen, G.; Huang, T.; Yu, X. On consensus of multi-agent systems with input saturation: Fully distributed adaptive anti-windup protocol design approach. IEEE Trans. Control Netw. Syst. 2020, 7, 1127–1139. [Google Scholar] [CrossRef]
- Du, B.Y.; Zhang, G.L.; Xu, J.; Zeng, J.; Zhang, Y. Consensus of discrete-time linear networked multi-agent systems subject to actuator saturation. Int. Conf. Intell. Auton. Syst. 2016, 531, 601–613. [Google Scholar]
- Li, Y.; Xiang, J.; Wei, W. Consensus problems for linear time-invariant multi-agent systems with saturation constraints. IET Control Theory Appl. 2011, 5, 823–829. [Google Scholar] [CrossRef]
- Fu, J.J.; Wen, G.H.; Yu, W.W.; Ding, Z.T. Finite-time consensus for second-order multi-agent systems with input saturation. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1758–1762. [Google Scholar] [CrossRef]
- Zhang, D.D.; Duan, G.R. Leader-following fixed-time output feedback consensus for second-order multi-agent systems with input saturation. Int. J. Syst. Sci. 2018, 49, 2873–2887. [Google Scholar] [CrossRef]
- Huang, K.D.; Yuan, C.Z. Dynamic relative output-feedback consensus for multi-agent systems subject to actuator saturation. IEEE Access 2020, 8, 111239–111252. [Google Scholar] [CrossRef]
- Su, H.S.; Qiu, Y.; Wang, L. Semi-global output consensus of discrete-time multi-agent systems with input saturation and external disturbances. ISA Trans. 2017, 67, 131–139. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Shi, L.R.; Guan, X.P. Semi-global leaderless consensus of linear multi-agent systems with actuator and communication constraints. J. Syst. Sci. Complex. 2020, 33, 882–902. [Google Scholar] [CrossRef]
- Geng, H.; Chen, Z.Q.; Liu, Z.X.; Zhang, Q. Consensus of a heterogeneous multi-agent system with input saturation. Neurocomputing 2015, 166, 382–388. [Google Scholar] [CrossRef]
- Liu, K.X.; Gu, H.B.; Wang, W.; Lu, J.H. Semiglobal consensus of a class of heterogeneous multi-agent systems with saturation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4946–4955. [Google Scholar] [CrossRef]
- Li, T.; Qiu, Q.; Zhao, C.J. A fully distributed protocol with an event-triggered communication strategy for second-order multi-agent systems consensus with nonlinear dynamics. Sensors 2021, 21, 4059. [Google Scholar] [CrossRef]
- Liu, X.L.; Chen, D.X.; Wang, Y.W. Distributed impulsive consensus of nonlinear multi-agent systems with input saturation. Int. J. Mod. Phys. C 2019, 30, 1940001. [Google Scholar] [CrossRef]
- Liu, X.L.; Chen, D.X.; Liu, Z.W.; Wang, Y.W. Distributed leaderless impulsive consensus of non-linear multi-agent systems with input saturation. Nonlinear Anal. Hybrid Syst. 2020, 36, 100855. [Google Scholar] [CrossRef]
- Xu, G.H.; Li, M.; Chen, J.; Lai, Q.; Zhao, X.W. Formation tracking control for multi-agent networks with fixed time convergence via terminal Sliding mode control approach. Sensors 2021, 21, 1416. [Google Scholar] [CrossRef]
- Wang, R.; Liu, G.P.; Wang, B.; Wang, W.; Rees, D. L2-gain analysis for networked predictive control systems based on switching method. Int. J. Control 2009, 86, 1148–1156. [Google Scholar] [CrossRef]
- Yang, T.; Meng, Z.; Dimarogonas, D.V. Global consensus for discrete-time multi-agent systems with input saturation constraints. Automatica 2014, 50, 499–506. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, C.; Cui, Y.; Li, Y. Global Consensus of High-Order Discrete-Time Multi-Agent Systems with Communication Delay and Saturation Constraint. Sensors 2022, 22, 1007. https://doi.org/10.3390/s22031007
Tan C, Cui Y, Li Y. Global Consensus of High-Order Discrete-Time Multi-Agent Systems with Communication Delay and Saturation Constraint. Sensors. 2022; 22(3):1007. https://doi.org/10.3390/s22031007
Chicago/Turabian StyleTan, Chong, Yin Cui, and Yanjiang Li. 2022. "Global Consensus of High-Order Discrete-Time Multi-Agent Systems with Communication Delay and Saturation Constraint" Sensors 22, no. 3: 1007. https://doi.org/10.3390/s22031007