3.2. Least-Squares Localization
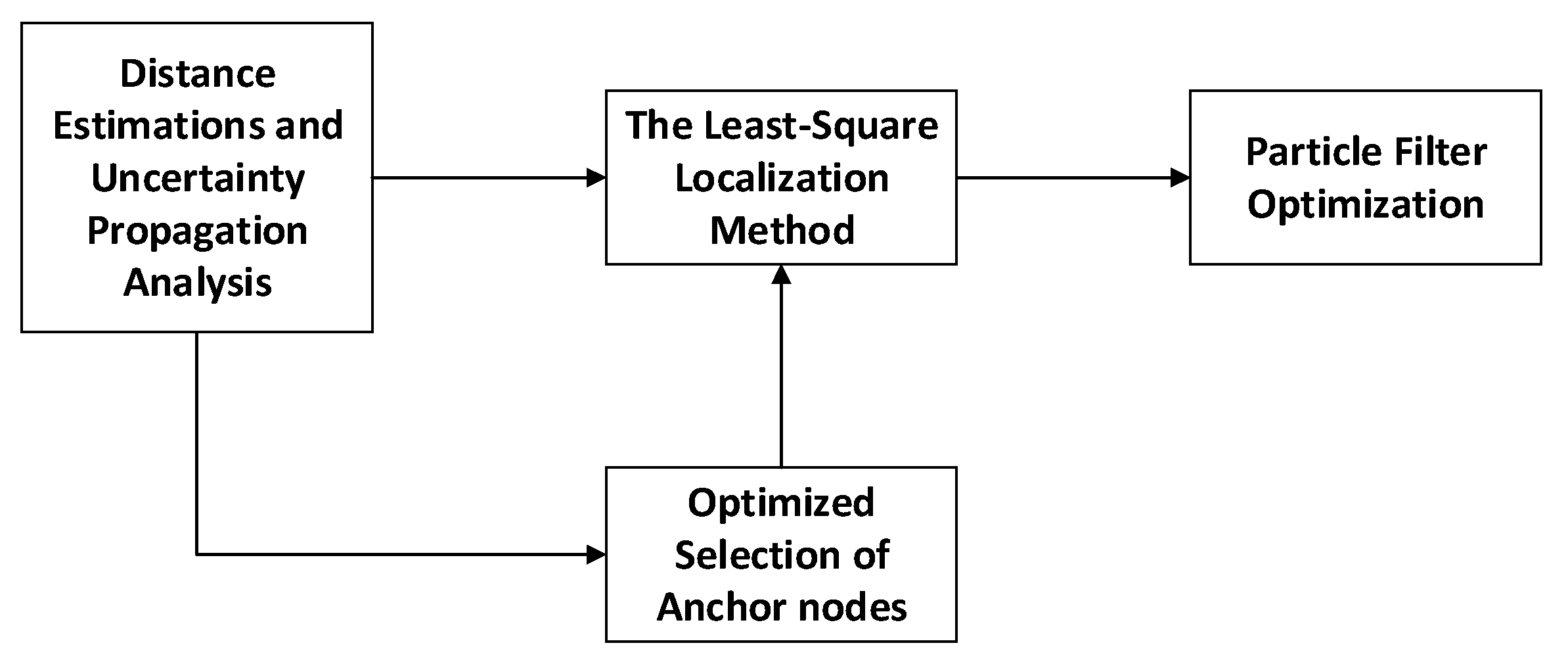
When analyzing the system structure, we first introduce the least-squares location method, as the quality of the anchor nodes is evaluated for the least-squares localization method. After the anchor nodes are optimized, their coordinates and corresponding distance estimation results are also brought into the least-squares localization method to calculate the initial location of the mobile node.
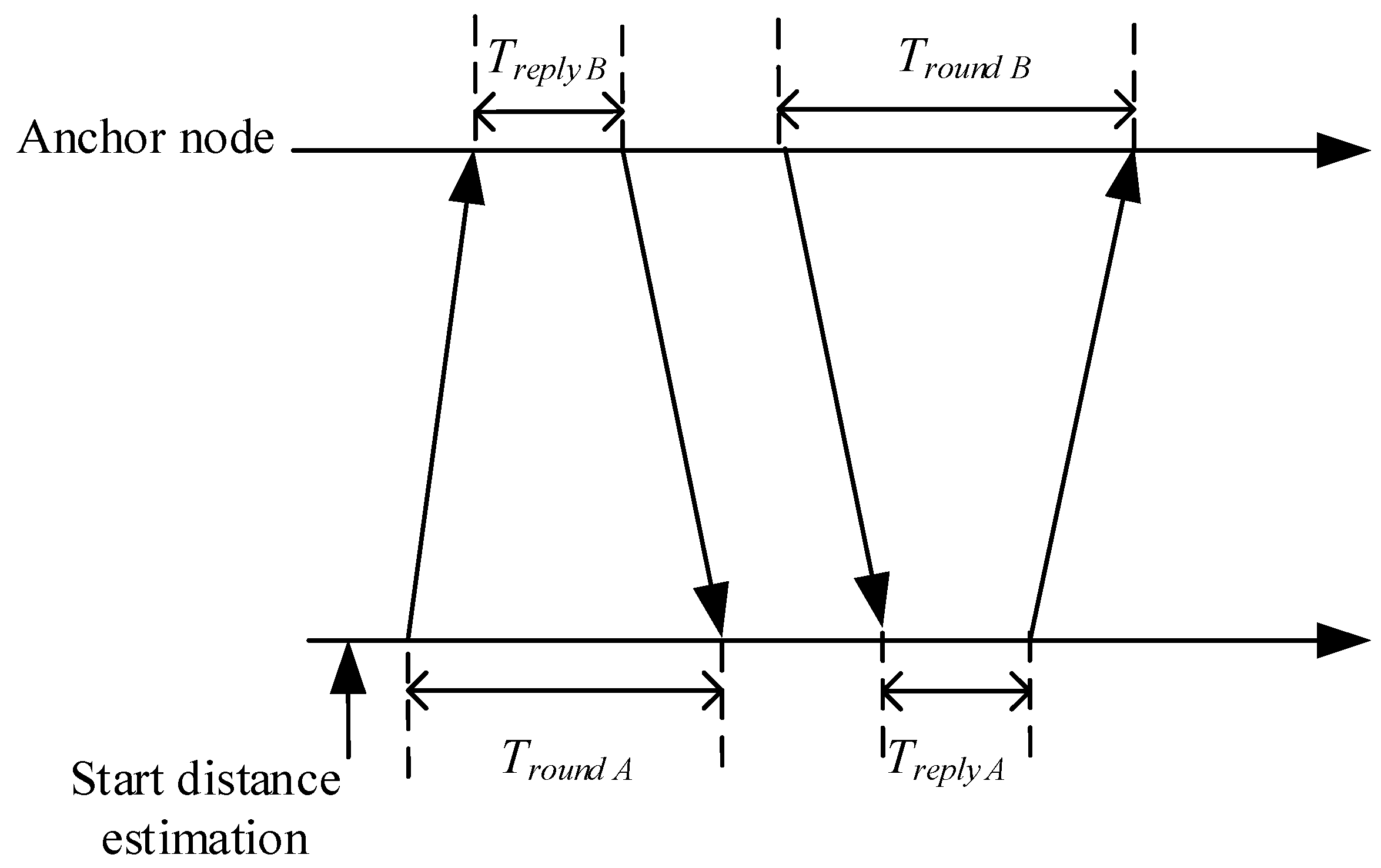
Before the least-squares method positioning, the distance estimation between the anchor node and the mobile node needs to be explained. The distance estimation of the anchor node and the mobile node can use RSSI, AOA, TOA, TDOA, SS-TWR, DS-TWR and other methods. In our method, we use DS-TWR, which is the most widely used distance estimation method. We show the procedure of a DS-TWR distance estimation between an unknown node and an anchor node in
Figure 2.
DS-TWR distance estimation method adds another communication based on SS-TWR distance estimation method, and the time of two communications can make up for the error caused by clock offset. The distance estimation between the anchor node and mobile node can be calculated using the Equation (1). In this equation,
,
denote the propagation delay from one node to another node, and
,
denote the processing delay of the anchor node.
denotes the propagation velocity of radio signal.
In this paper, to get higher accuracy distance estimation, it is estimated repeated N times, and each measurement is
,
,
. For example, for ranging between anchor node
and an unknown node, the average mean
is statistically calculated as the distance estimation results, and we adopt the standard deviation
as the uncertain information.
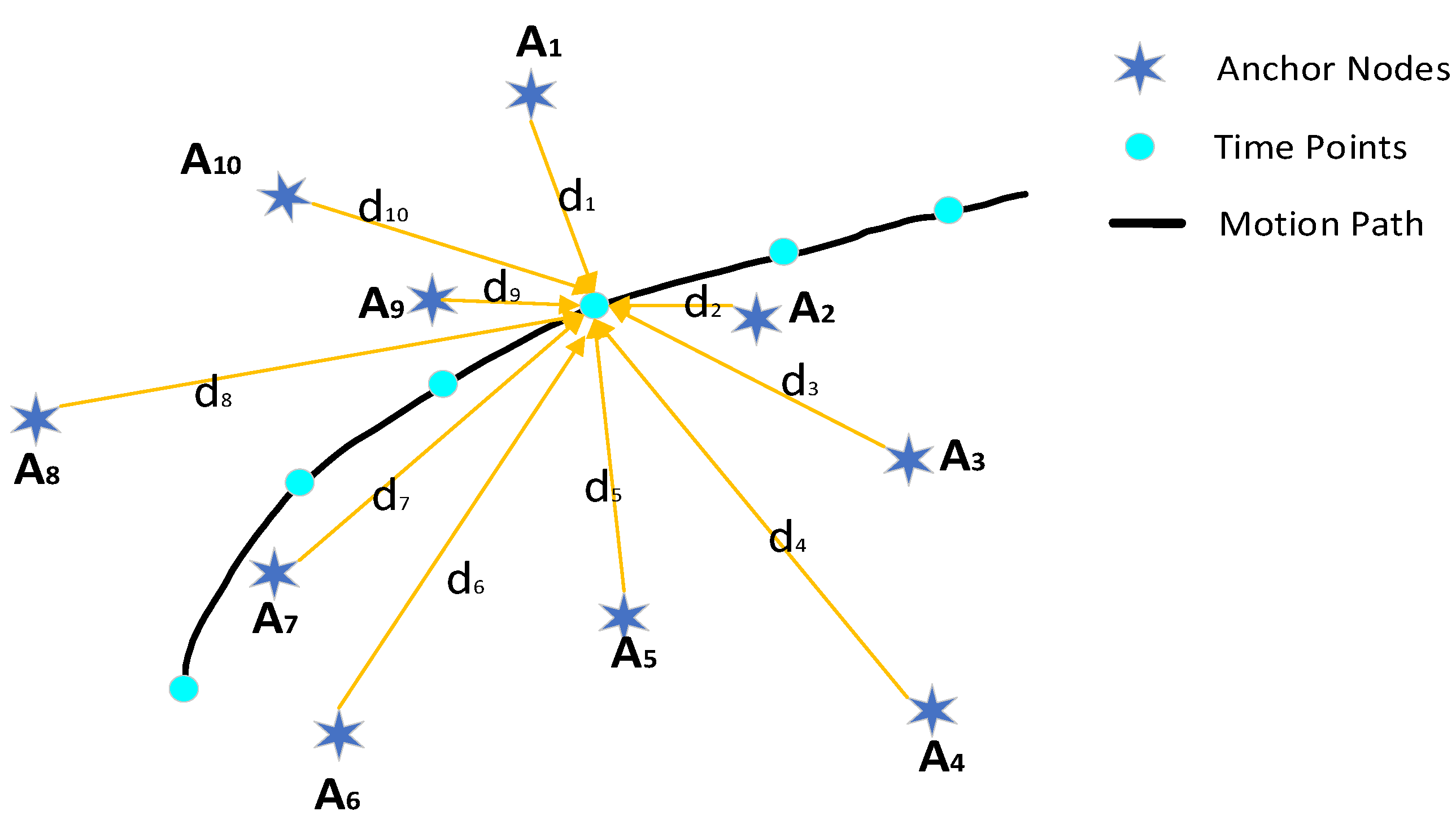
As shown in
Figure 3, we assume that there are
k known anchor nodes
with corresponding coordinates as follows:
, respectively. Suppose the position coordinate of the unknown node is
, the corresponding distance estimated by the anchor nodes are
.
The localization equations can be formed as follows:
In the form of matrix equality, where the matrices
A,
B and
X are defined as follows, respectively:
According to the principle of the least-squares method, the condition that the unknown node coordinate should satisfy is that the square sum of all measured distance and its corresponding actual distance error is minimum. Equation (4) is derived as linear square difference by the least-squares method, and the form is:
So, based on the least-squares criterion, we can obtain the solution for the location equations:
For the distributed nonlinear mobile positioning system, we locate the moving nodes by the least-squares method based on the distance measurement, the position coordinates of each moving node can be obtained.
3.3. Uncertainty Propagation Analysis and Optimal Selection of Anchor Nodes
When calculating the coordinates of moving nodes, one of the variables with uncertainty is the anchor node coordinate
, whose size is the sum of the actual value and a neighborhood not less than zero, which is decomposed into
in a rectangular coordinating system; The other uncertainty is the distance estimation
of the corresponding anchor node to the moving node, and the error is
. The sensitivity coefficients of anchor node coordinate and distance estimation are defined as follows:
According to the total differentiation formula (TDF), we can obtain the positioning error as the following result:
When we arrange the site, we can minimize the coordinate error of the anchor node by using relatively accurate calipers to determine the location of the anchor nodes. Therefore, we ignore the coordinate error
of the anchor nodes and pay attention to the estimation error of the distance between the mobile nodes. Then the location error of unknown nodes is as follows:
Then we can get the standard deviation of localization result through Equation (12) according to the square root rule:
From Equation (15), we can see that the standard deviation of localization result has a direct relationship with the distance estimation results and their corresponding standard deviation information. In addition, the error of the positioning result is proportional to the standard deviation of the distance estimation , and it is also proportional to the product of the estimated distance and the standard deviation of the corresponding estimation (it is defined as the error propagation factor).
Therefore, Equation (15) shows that the smaller the range standard deviation and error propagation factor, the smaller the localization error. According to this relationship, we propose the MSDO criteria and MEPO criteria.
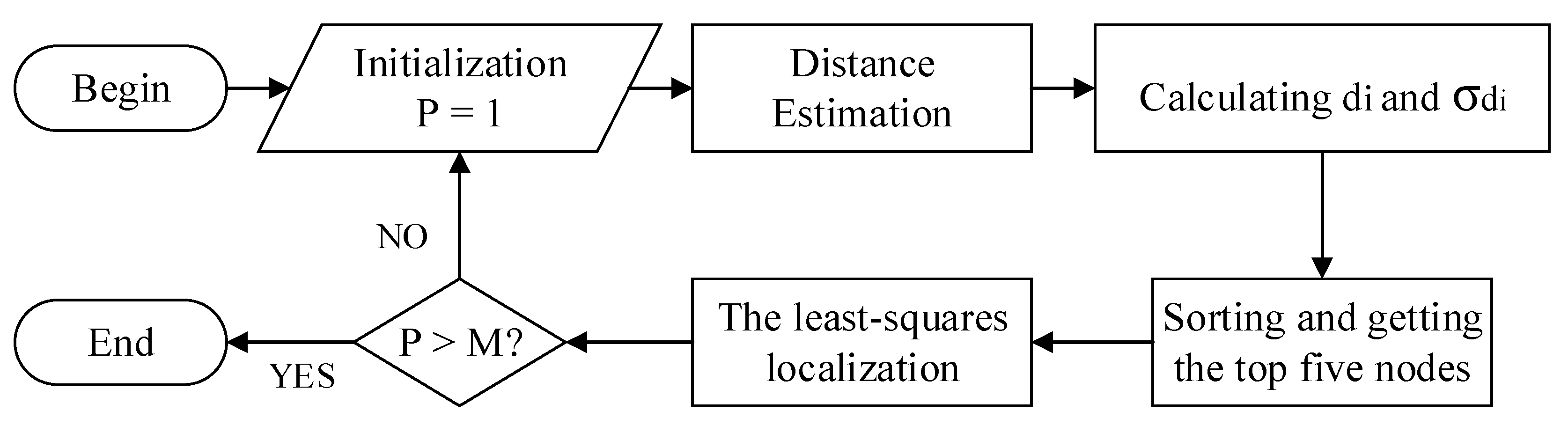
After uncertainty propagation analysis, the optimally selected anchor nodes’ ranging information will be applied to the least-squares localization method, which can effectively reduce the localization error in theory. It is mainly about the following four steps:
The anchor nodes are accurately placed in the site with a known location, and the coordinate of anchor nodes is obtained;
Each mobile node receives the range estimation of anchor node 150 times, in which there are k anchor nodes;
The mean values and standard deviation of 150 ranging numbers are calculated statistically, and the standard deviation and error propagation factors are sorted from small to large, the sort order represents the quality order of nodes;
According to the MSDO and MEPO criteria, we obtain the index of the corresponding anchor nodes (we select the nodes with index from 1 to 5). Then the selected anchor nodes and their corresponding distance estimation results are applied to the least-squares localization method, which will obtain the initial localization result.
3.4. Improvement of the Localization Results with Particle Filter Algorithm
The particle filter algorithm has outstanding advantages in solving the optimal estimation problem of the nonlinear non-Gaussian system, and it is also widely used in a nonlinear mobile positioning system.
After statistically calculating the distances estimation of the anchor nodes to the moving nodes, according to the MSDO criterion and the MEPO criterion, we bring the distance information and its coordinate information of the selected reliable anchor nodes into the least-squares localization algorithm to obtain the preliminary localization results.
In this section, we construct the state equation and observation equation after inputting the distance estimation results of the anchor node to the initial localization coordinates. The positions information of the optimized node is obtained by particle filter algorithm to track the motion state of the moving node. The distributed localization methods based on anchor node selection and particle filter optimization have been proposed, called MSDO-PF and MEPO-PF. The following is a detailed illustration.
Suppose that the motion model of the mobile node is as follows:
where
denotes the motion time of mobile nodes, random variable
denotes the predicted value of target location, and
denotes the observed value of the target position. In this method,
is the preliminary result of positioning after the optimization of anchor nodes.
and
are nonlinear function.
denotes the system noise and
denotes the observation noise, both are independent.
Construct a set
containing N particles, where
represents the state of the
ith particle at the moment,
represents the weight of this particle, and the weights satisfied that
.
denotes the real coordinates of the target at time
k, and
A is the posterior probability density of
at this time. Then the final positioning result is expressed as:
In practical application, it is challenging to extract effective samples directly from a posterior probability distribution. So Sequential Importance Sampling (SIS) is introduced to improve sampling efficiency. SIS extracts samples of the known importance sampling density
and avoids directly extracting samples of
. The Equation (17) can be expressed as:
The importance density function is decomposed as follows:
According to the importance sampling theory, the appropriate importance sampling density is selected as follows:
The recursive form of the posterior probability density function is as follows:
Then the particle weight represented by Equation (19) can be expressed as an iterative form:
Formula (23) is expressed as a recursive form:
Using the Monte Carlo sampling method, the expression (17) is as follows:
In Equation (25), because of:
The weight of the particles is satisfied:
The weighted particle set
is used to approximate the position of the Particle filter, and the output result is:
where the particle weight is:
At this time, there is an inevitable particle degradation problem in the particle filter algorithm. With the increase of iterations, only a few particles are close to the actual samples, and the weight of most particles is minimal, which causes a waste of computing resources. According to the theory of particle filter, we add the resampling to reduce the degradation of the Particle filter.
3.5. Complexity Analysis
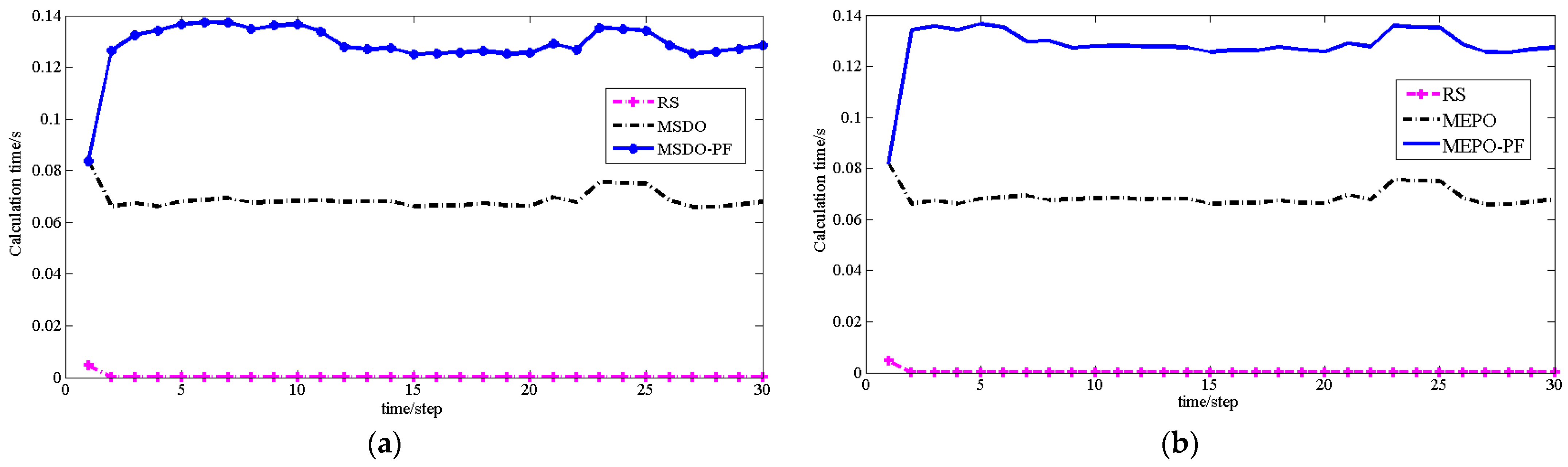
We make computing time complexity analysis of the proposed method as following. The proposed method mainly comprises the statistical calculation of distance estimation, the optimization selection of anchor nodes, the least-square localization, and the particle filtering. The complexity of the statistical calculation is . The complexity of the optimization selection is . The complexity of the least-square localization is . The complexity of the particle filtering is . Here N is the repeated measurement number of distance, k is the number of anchor nodes, P is the number of particles, S is the number of iterations, is the number of states.
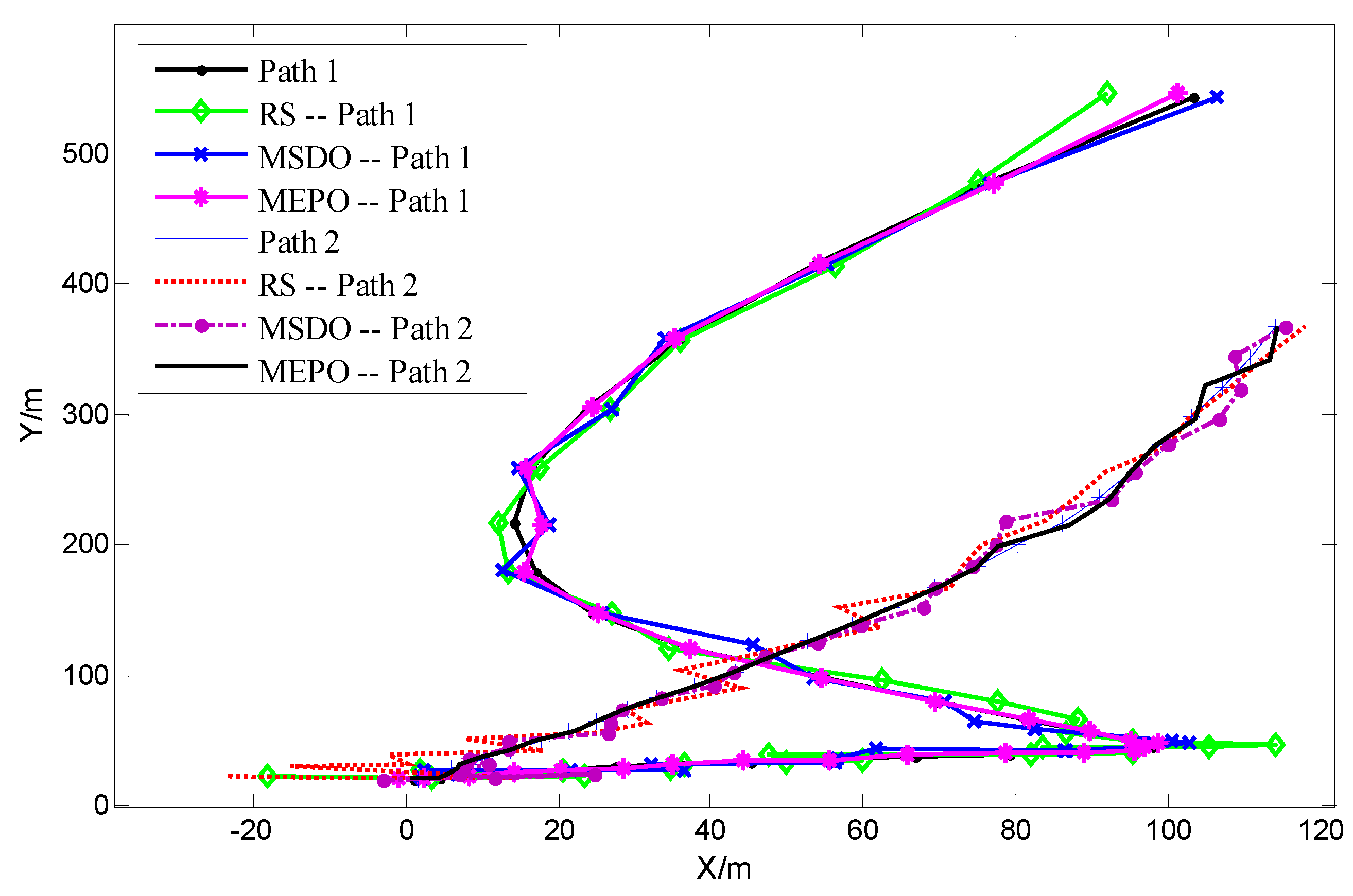
For reference, we compare related least-square localization methods. They are the randomly selected (RS) anchor nodes [
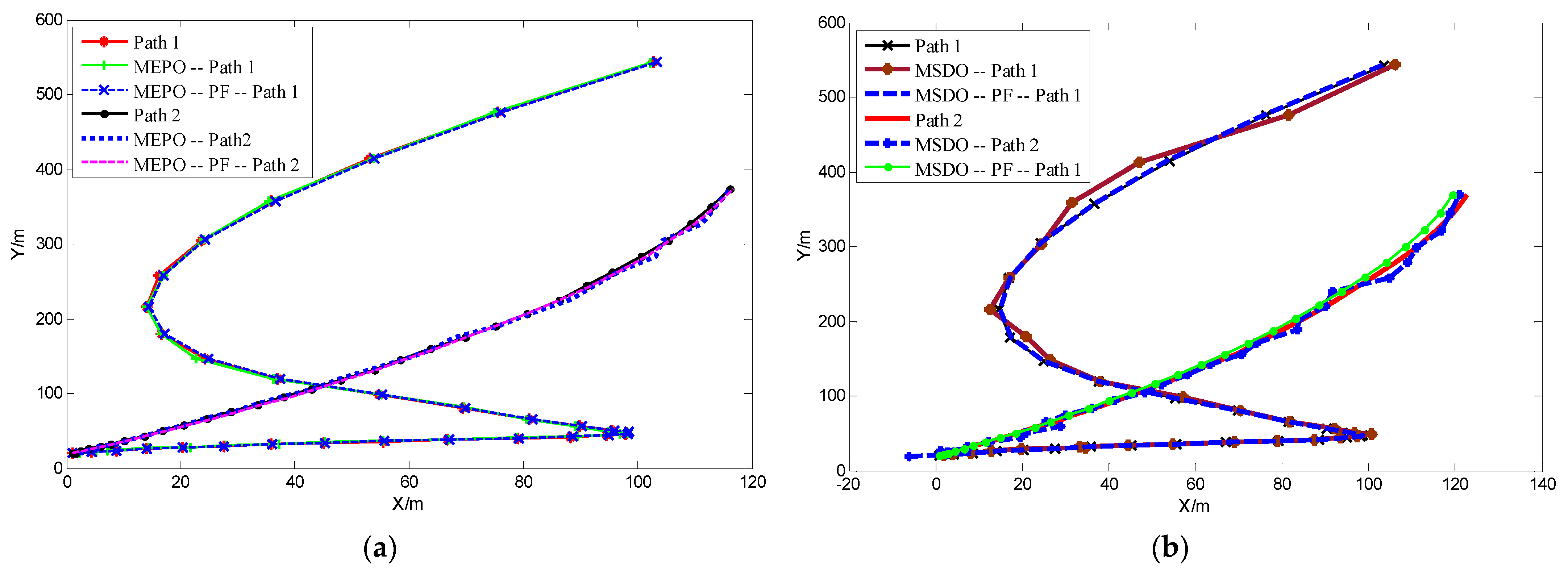
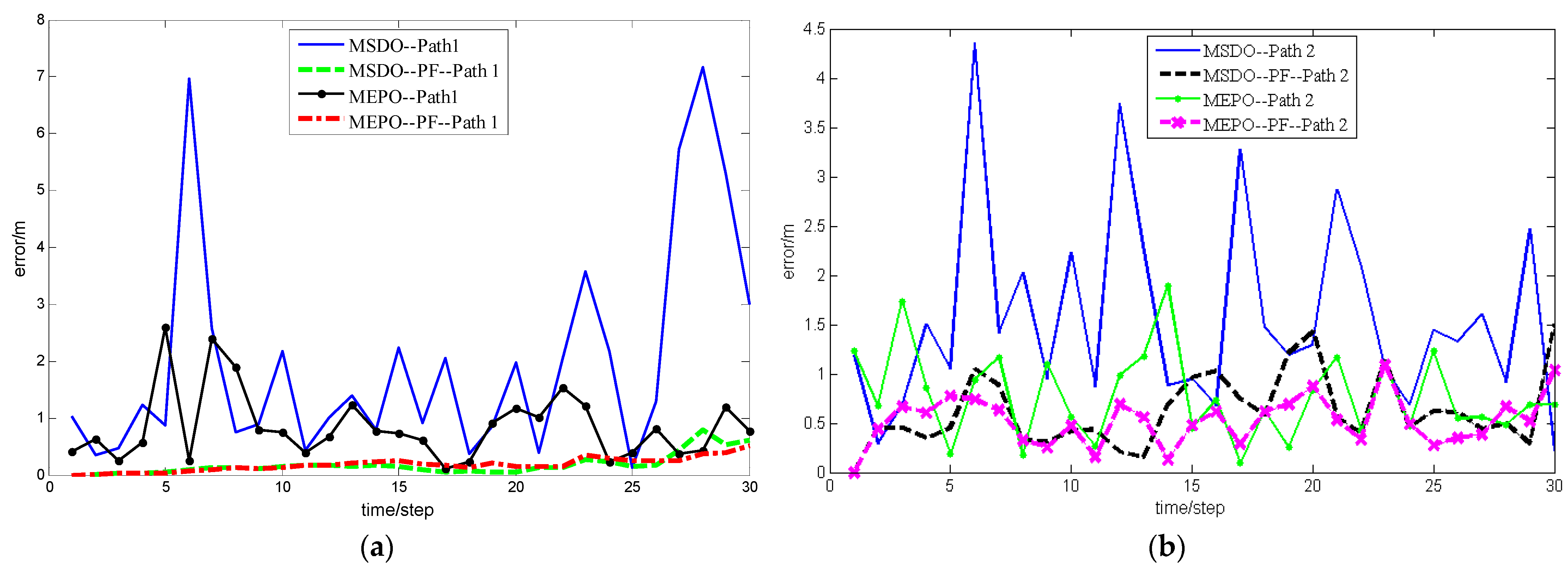
6], the proposed minimum standard deviation optimization (MSDO) and the proposed minimum error propagation optimization (MEPO), the minimum standard deviation optimization with particle filter optimization (MSDO-PE), and the minimum error propagation optimization with particle filter optimization (MEPO-PE).
Based on above analysis, the complexity of RS is
. The complexity of MSDO is
. The complexity of MEPO is
. The complexity of MSDO-PE is
. The complexity of MEPO-PE is
. We show the complexity of these methods in
Table 1.
From
Table 1, it is illustrated that with a particle filter, the complexity of the proposed method is higher than that without a particle filter. The complexity of the MSDO-PE and MEPO-PE methods is the same level. The complexity of the RS, MSDO and MEPO methods are the same level.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}