1. Introduction
The automobile has become a common mode of transportation in peoples’ lives. With the improvement in living standards, people put higher requirements on vehicle performance, and the suspension system is an important part that affects this performance. The suspension connects the wheels to the body and reduces the vibration transmitted to the vehicle by the road. However, the damping and stiffness of passive suspensions are not adjustable, can only achieve optimal performance under specific operating conditions, and cannot adapt to varying operating conditions [
1]. Conversely, active suspension has adjustable stiffness and damping, which can effectively improve vehicle stability [
2,
3]. Electromagnetic suspension has fast response characteristics, good control characteristics, and easy decoupling control, and, as such, has become a research hotspot in the field of active suspension [
4,
5,
6]. Research on electromagnetic active suspension mainly focuses on the feed characteristics of the actuator [
7,
8,
9], control method research [
10,
11,
12], and suspension performance [
13,
14].
Van der Sande, T. P. J. et al. [
15] designed a new high-bandwidth control method for an electromagnetic active suspension system and simulated it in a 1:4-scale car model to improve comfort and handling. Li Z. et al. [
16] proposed a multi-objective optimal control method for active suspension systems. An integrated electromechanical coupling model between motor electromagnetic excitation and transient vehicle dynamics is considered, and the Pareto solution set of optimal parameters is calculated using a particle swarm algorithm. The simulation analysis illustrates that vehicle ride comfort and road holding can be effectively improved. Ataei, M. [
17] et al. investigated a hybrid electromagnetic suspension system. They evaluated the ride comfort, road holding, and regenerative power and performed a multi-objective optimization using a genetic algorithm. The simulation analysis results showed improvements in ride comfort and road holding and a significant increase in regenerative power. Kou F. [
18] et al. proposed a hybrid actuator composed of a linear motor and a solenoid valve to study fault-tolerant control during the fault condition. The experimental results show that the root mean square (RMS) of the spring-mass acceleration can be effectively reduced in the fault-tolerant control state, which improves the dynamic performance of the suspension. Sun X. [
19] et al. proposed a model predictive thrust control (MPTFC) method for linear motors with a switching frequency term in the evaluation function, which is investigated for an automotive active suspension system. Simulation results show that a linear motor suspension with MPTFC is able to generate the required force according to the body vibration. Wei W. [
20,
21] et al. proposed an electromagnetic actuator that simultaneously achieves vehicle vibration suppression and power recovery. Long G. [
22] et al. proposed a motor-driven actuator and experimentally obtained a good energy-feeding effect. Ding R. [
23] et al. proposed a hybrid electromagnetic suspension and studied its active control and energy feeding. Asadi E. [
24] et al. proposed a hybrid electromagnetic damper and conducted structural optimization and energy-feeding experiments. Xie L. [
25] et al. proposed an electromagnetic energy-feeding damper and investigated its energy-feeding characteristics. An energy-fed electromagnetic actuator was designed by R. Zhou [
26,
27] et al. The sensitivity of each physical and electrical parameter of the actuator to the power recovery was analyzed, and the power recovery efficiency of this was investigated. The self-powering technology of the energy-fed electromagnetic actuator was also studied. Yao M. [
28] et al. designed a nonlinear electromagnetic energy harvester (EMEH) for automotive suspensions. The effect of structural parameters on the output characteristics of the nonlinear electromagnetic energy harvester was investigated. The results show that the higher the road class and the higher the vehicle speed, the better the output characteristics of the nonlinear electromagnetic energy harvester. Young I. [
29] et al. designed an anti-jerk optimal predictive control method for active and semi-active suspension systems. This approach can reduce body jerk and improve ride comfort. The above research has greatly contributed to improvements in the actuator structure, control strategy, optimization of control parameters, and energy feeding of electromagnetic active suspensions, leading to the rapid development of the electromagnetic active suspension field. The research has also contributed to the application to the vehicle of electromagnetic actuators. However, most of these studies were based on vehicles working under conventional operating conditions.
Li Z. [
30] et al. proposed a real-time controller for an electric vehicle with a four-wheel independent motor drive. It was shown that the controller could effectively improve the vehicle’s overall stability under extreme conditions and has good robustness when the vehicle mass or road adhesion coefficient is uncertain. Hang P. [
31] et al. designed an active rear steering (ARS) control system. The active safety performance of the vehicle under extreme conditions was investigated. The results showed that the ARS system facilitated the active safety performance of human drivers. Liu G. [
32] et al. proposed a control method for a vehicle lateral stability control system. The complex friction condition operating conditions were simulated and analyzed by joint simulation in MATLAB and CarSim. The results showed that the proposed control algorithm could improve the vehicle’s stability effectively. Sun X. [
33] et al. proposed a new adaptive non-singular fast terminal sliding mode control scheme. The analysis of a vehicle in wet road conditions was carried out by TruckSim–Simulink co-simulation. The results show that the lateral stability of the vehicle is significantly improved. The above studies mainly focus on the vehicle’s dynamic performance and control strategies at extreme operating conditions. At the same time, fewer studies have investigated the electromagnetic active suspension of a vehicle at extreme operating conditions. Ji Y. [
34] et al. conducted a stability study of a hybrid electromagnetic suspension with an active lateral stabilizer bar. They showed through simulation that the suspension of this structure can improve the vehicle’s anti-roll performance.
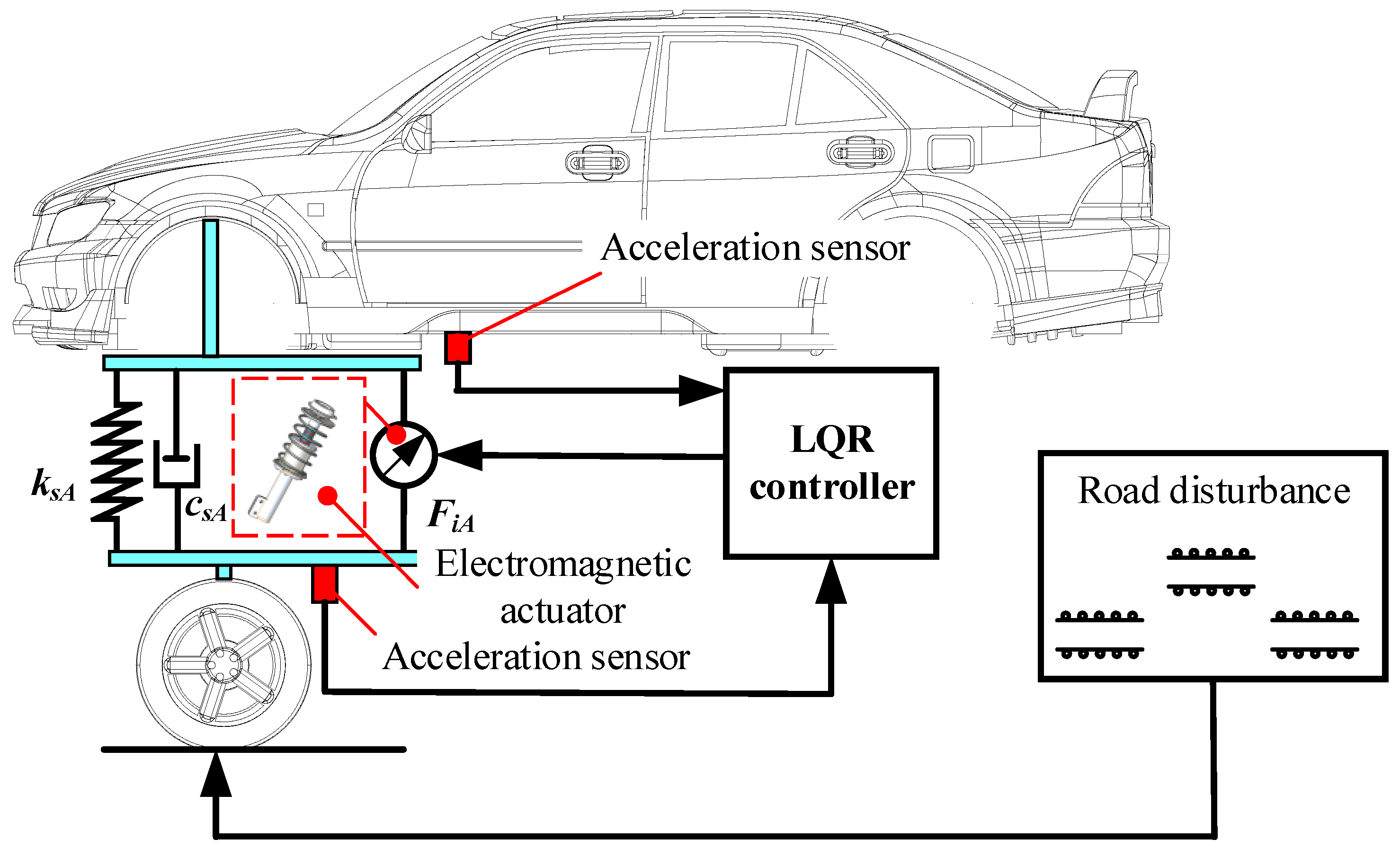
In this paper, electromagnetic active suspension is studied. The performance of electromagnetic active suspension is investigated under extreme conditions, such as high-speed driving conditions on Class C roads, double-shift line conditions with low coefficient of adhesion, and emergency acceleration and braking conditions. A linear quadratic regulator (LQR) controller was designed, and the overall vehicle stability was analyzed using joint simulation in MATLAB and CarSim. Vehicle stability of the electromagnetic active suspension under extreme conditions is discussed, and the root mean square values of the main evaluation indexes of the electromagnetic active suspension under extreme conditions of operation are described. The novelty of this paper is that electromagnetic active suspension is studied for vehicle stability under extreme working conditions. A reference is provided for the performance of vehicles equipped with electromagnetic active suspension under extreme conditions.
This paper consists of six sections. In
Section 2, the mathematical model of the vehicle is introduced. The LQR controller is given in
Section 3. In
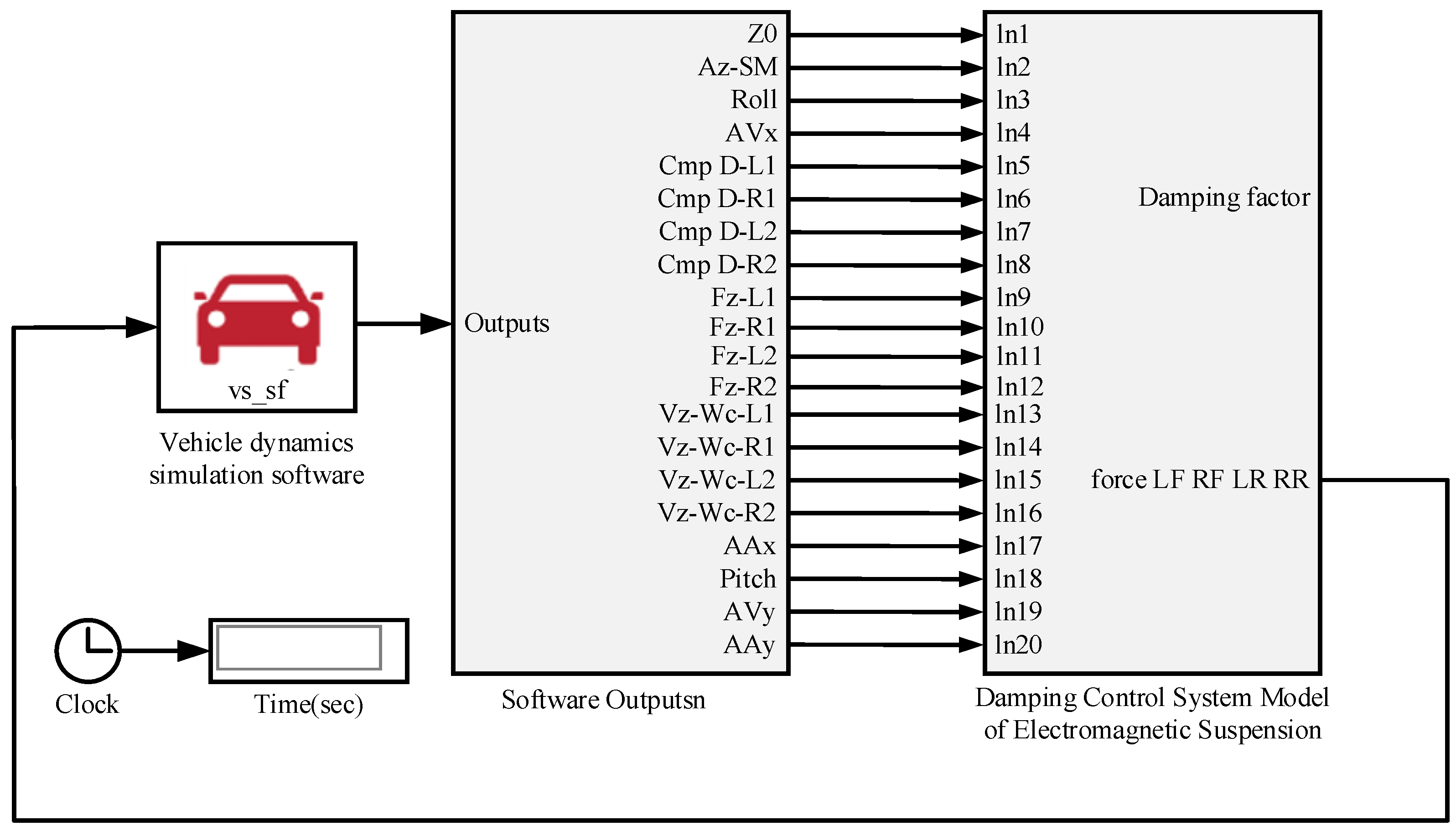
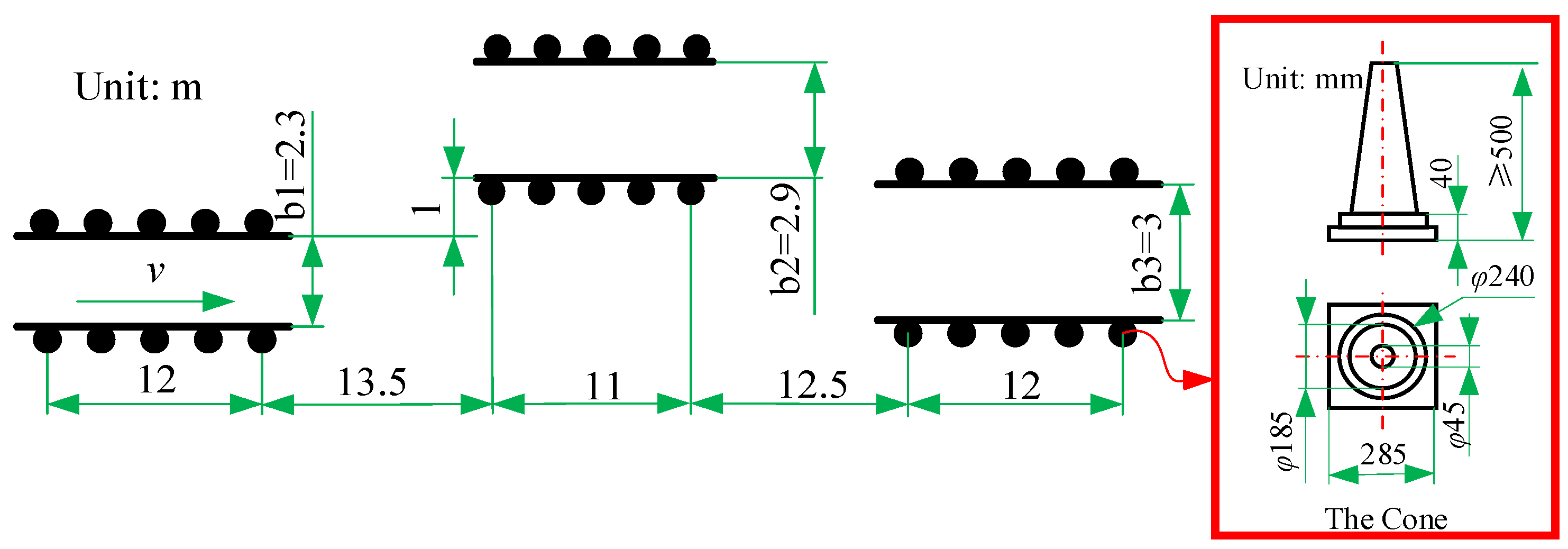
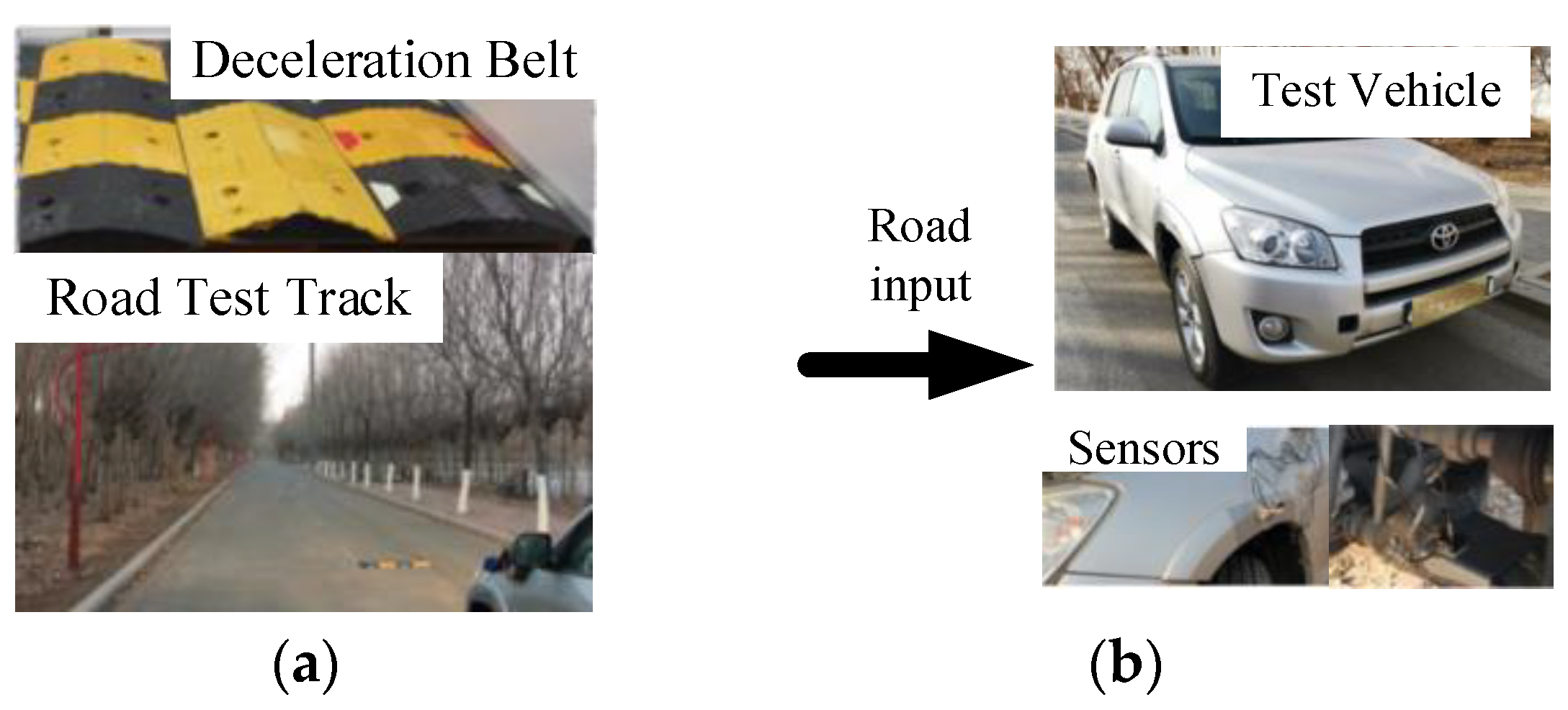
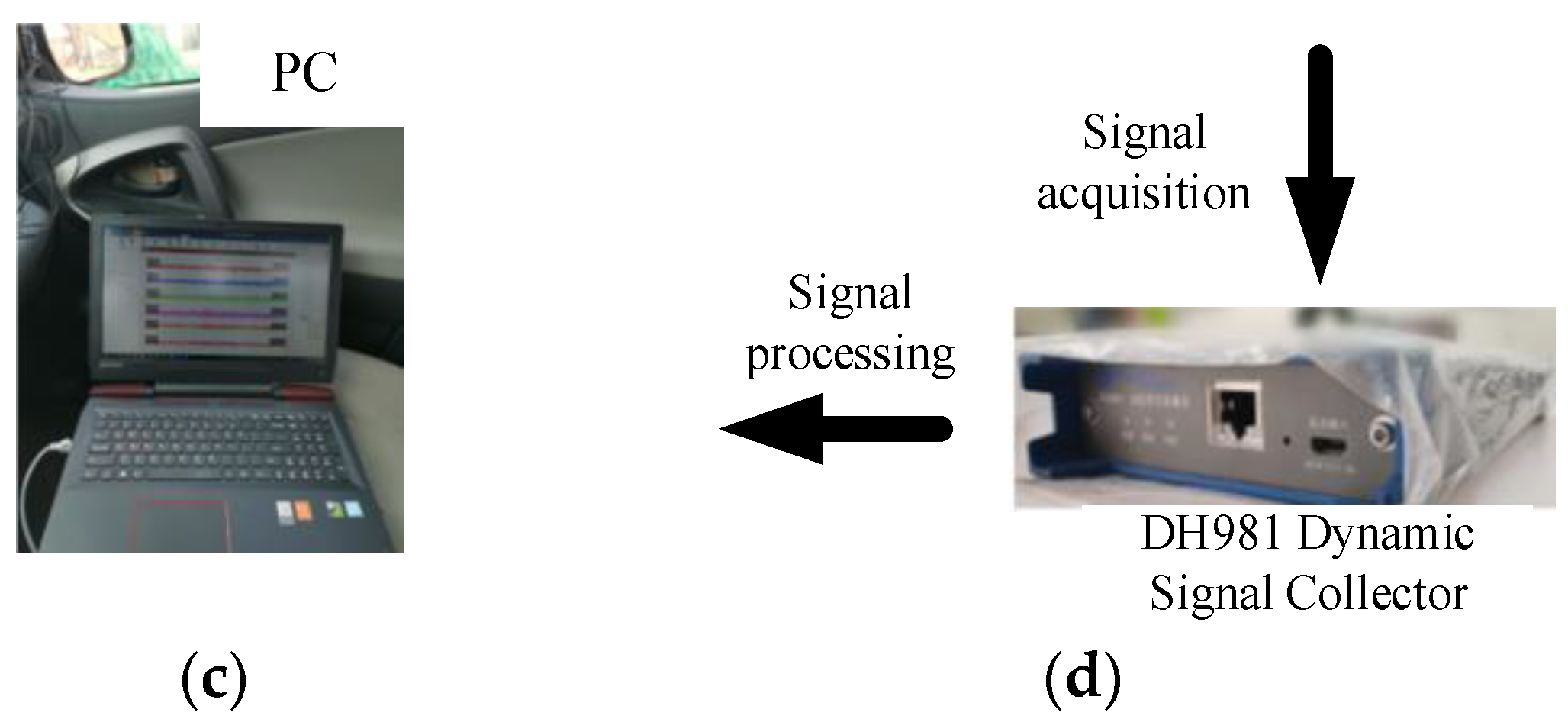
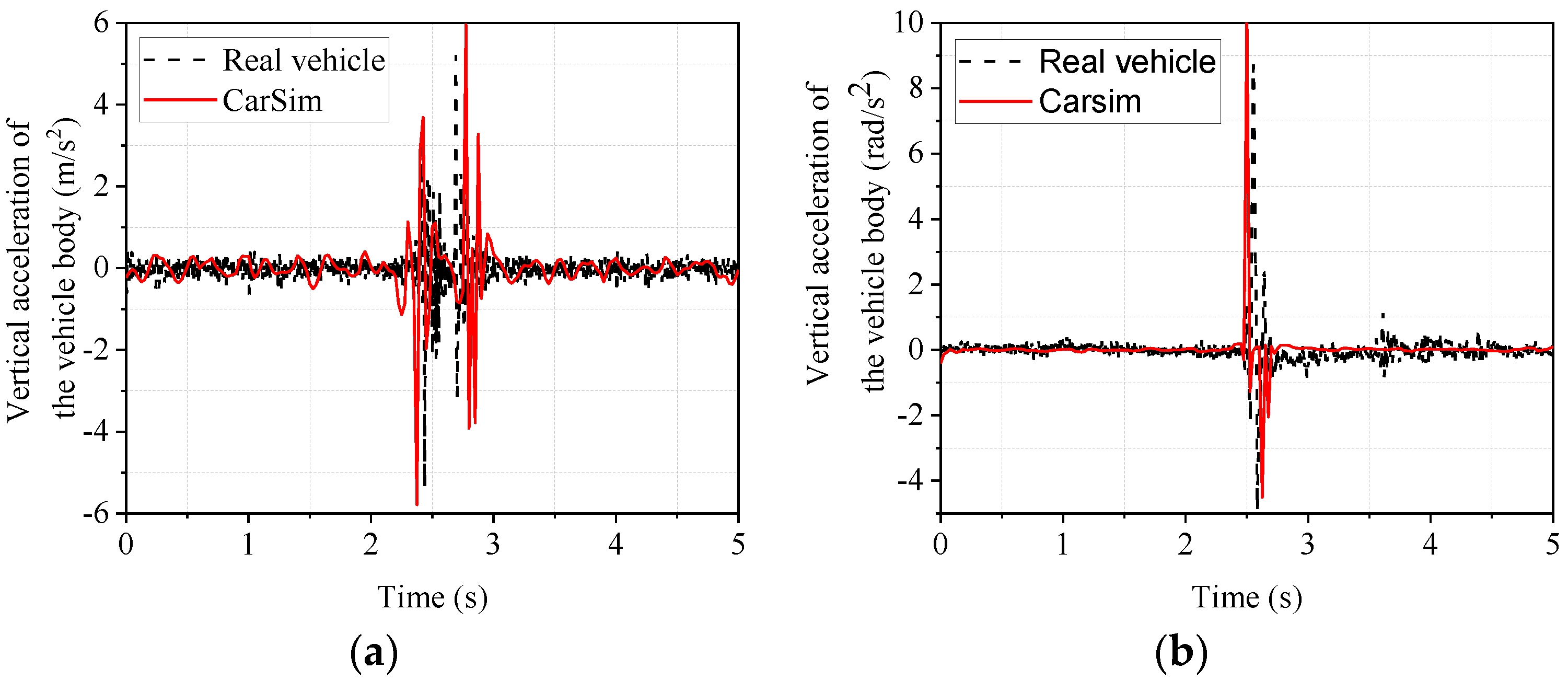
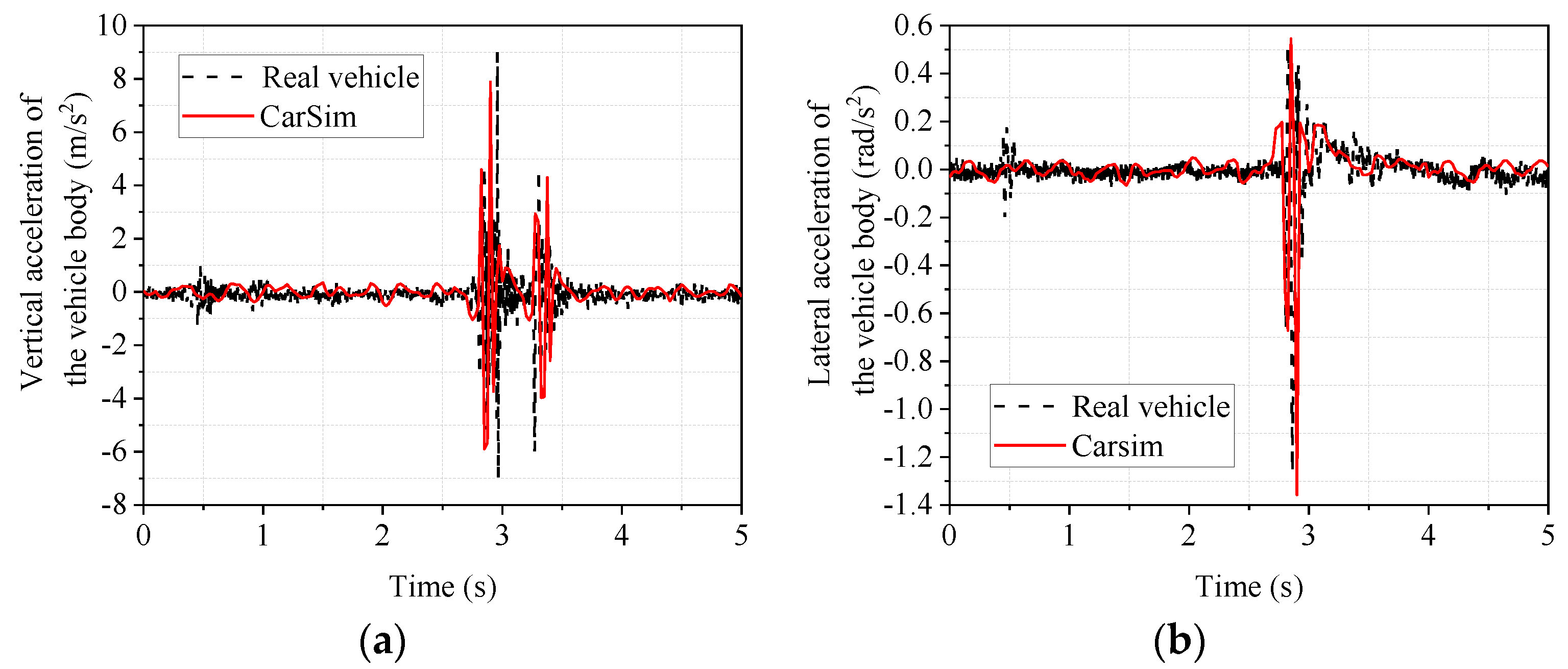
Section 4, a joint MATLAB and CarSim simulation platform is built and verified by real vehicle tests. Four typical extreme operating conditions are also designed. Simulation analysis is performed in
Section 5. Conclusions are given in
Section 6.
2. Mathematical Modeling of Vehicles
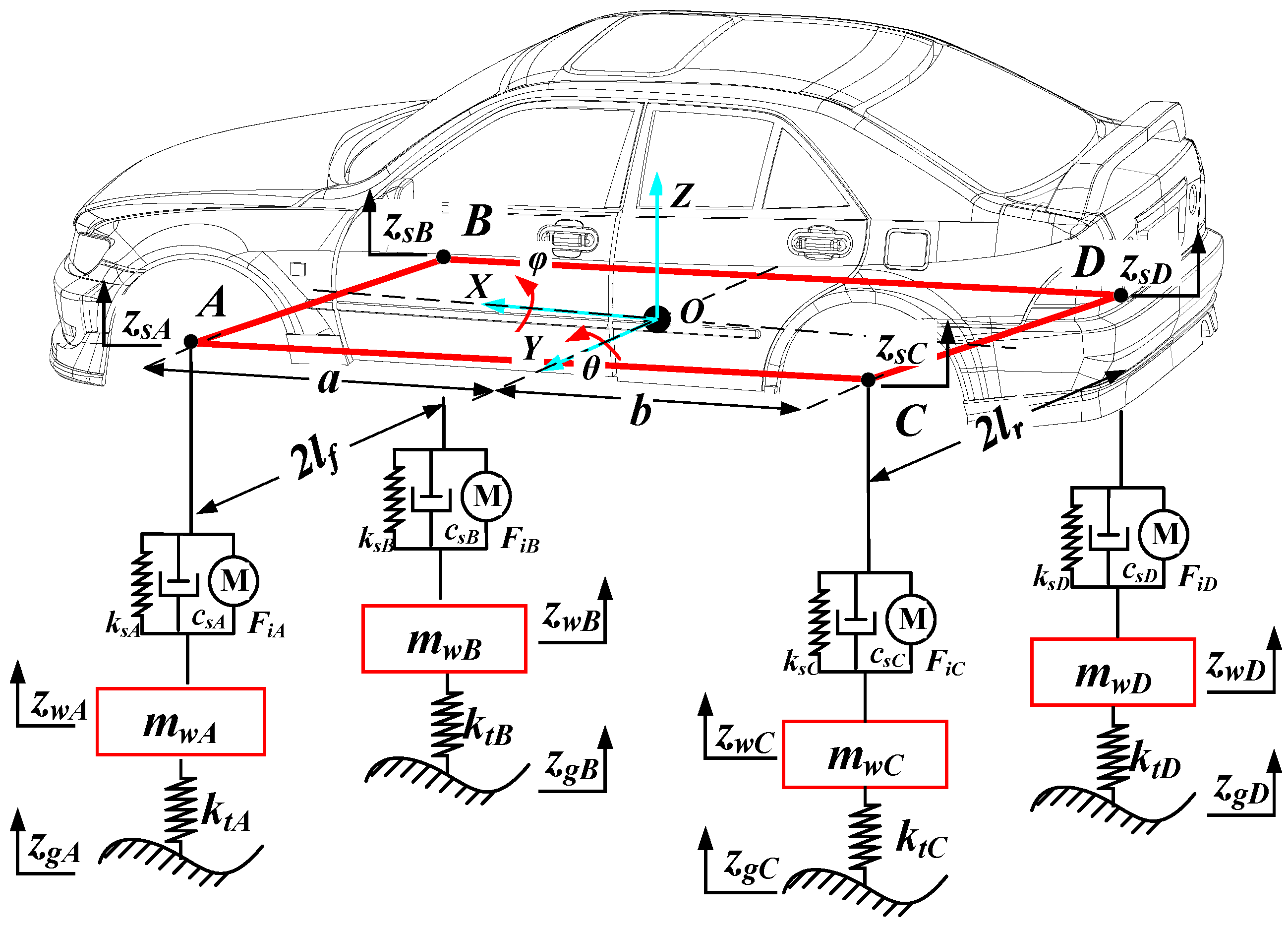
The Cartesian coordinate system O-XYZ is established with the center of mass of the body as the origin O, the forward direction of the vehicle as the positive X-axis direction, and the direction of the body away from the ground as the positive Z-axis direction. A is the simplified connection point between the body and the left front suspension, B is the simplified connection point between the body and the right front suspension, C is the simplified connection point between the body and the left rear suspension, and D is the simplified connection point between the body and the right rear suspension. The wheels are simplified as linear springs with stiffness
kti, the suspension is simplified as springs with stiffness
ksi and dampers with damping
csi, the wheels are simplified as unsprung masses with mass
mwi, and finally, the vehicle is simplified as a seven degrees of freedom (7-DOF) model, as shown in
Figure 1, containing the center-of-mass motion, pitch motion, lateral tilt motion, and vertical motion of the four suspensions of the vehicle.
The vehicle’s kinematic equations are established according to Newton’s laws of motion. The equation of the body mass vertical motion along the Z-axis is:
The equation of lateral tilt motion for rotation about the Y-axis is:
where
Ip is the rotational inertia of the body to the Y axis, ∑
Ff is the combined forces of the front suspension, and ∑
Fr is the combined forces of the rear suspension.
The equation of lateral tilt motion for rotation about the X-axis is:
where
Ir is the rotational inertia of the body to the X-axis, ∑
FA is the combined forces of the left front suspension, ∑
FB is the combined forces of the rear front suspension, ∑
FC is the combined forces of the left rear suspension, and ∑
FD is combined forces of the right rear suspension.
The equations of vertical motion of the four suspensions are:
6. Conclusions
In this paper, firstly, a 7-DOF vehicle dynamics model is established, and an LQR controller is designed. Secondly, the general road high-speed driving condition, low adhesion coefficient double shift line condition, emergency acceleration condition, and emergency braking condition are designed. Then, the simulation of LQR control with electromagnetic suspension and passive suspension is carried out by the joint simulation using CarSim vehicle dynamics software and Matlab/Simulink. The indexes are compared and analyzed. The following conclusions can be drawn.
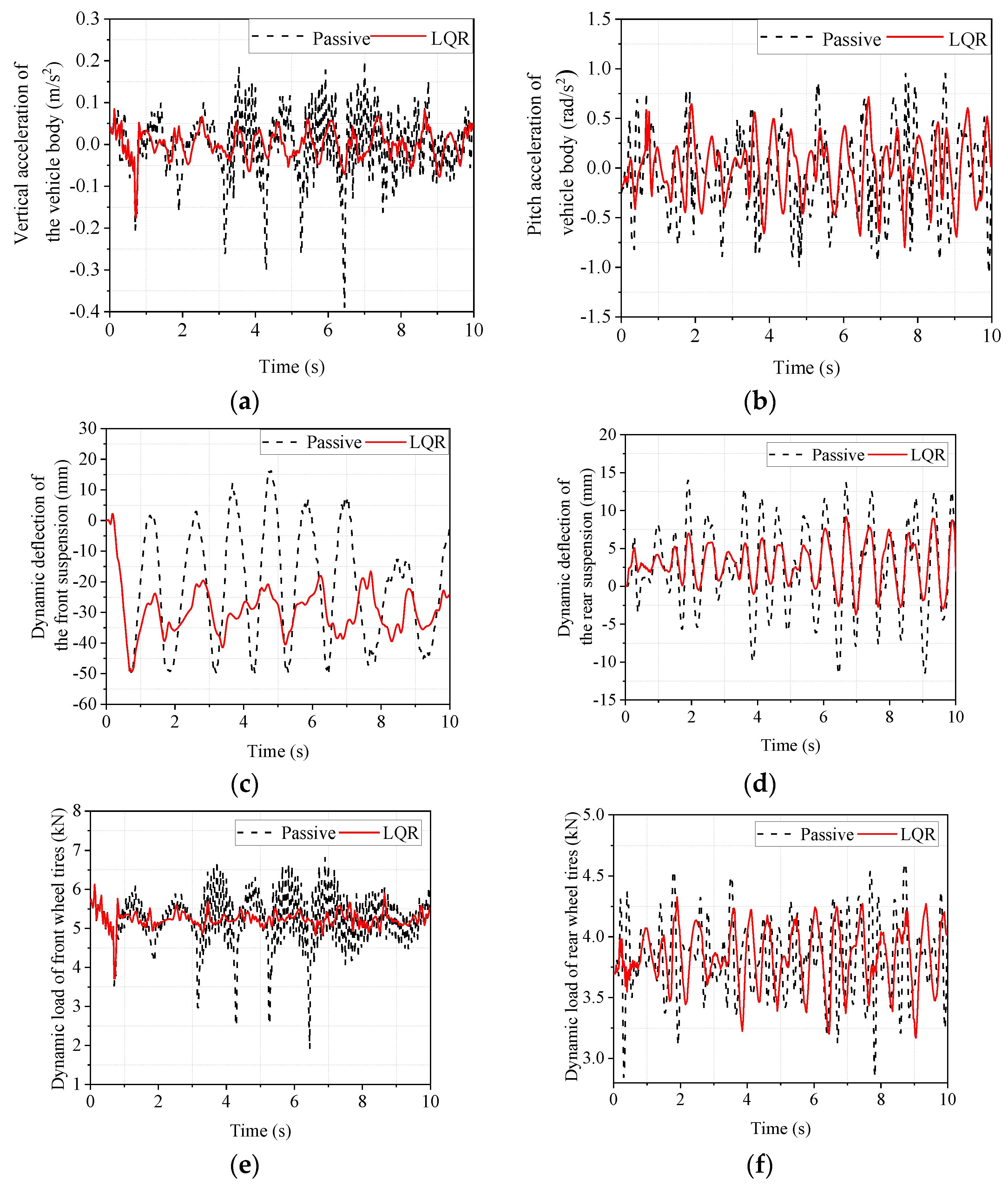
In the high-speed driving condition on a Class C road, the LQR-controlled electromagnetic active suspension significantly improved the vehicle body droop acceleration and body pitch angle acceleration by 57.48% and 28.81%, respectively. While the front suspension dynamic deflection deteriorated by 9.24% and the rear suspension dynamic deflection improved by 34.78%, the front, and rear tire dynamic load did not change much. This shows that the LQR-controlled electromagnetic active suspension can effectively improve the ride comfort of the whole vehicle.
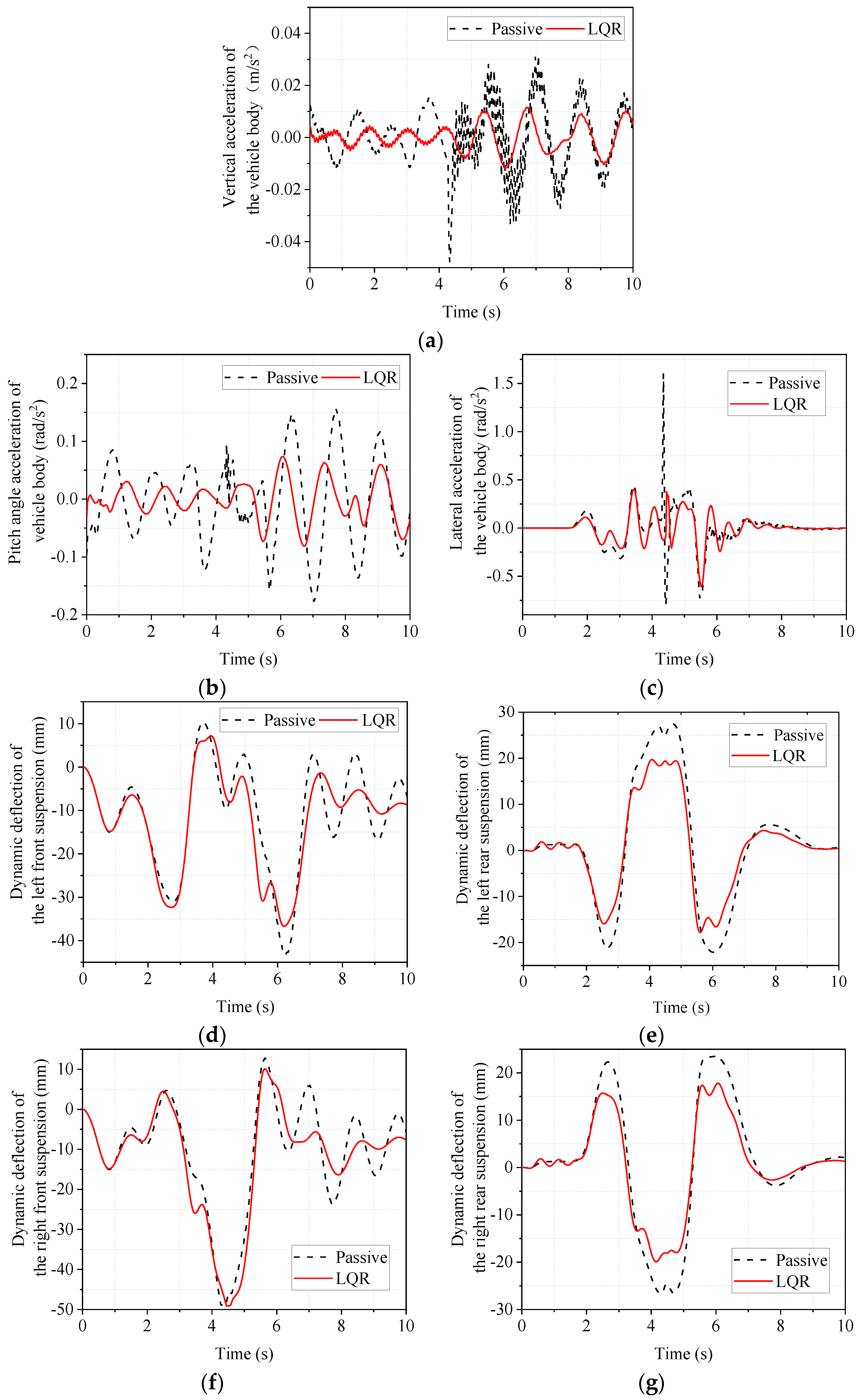
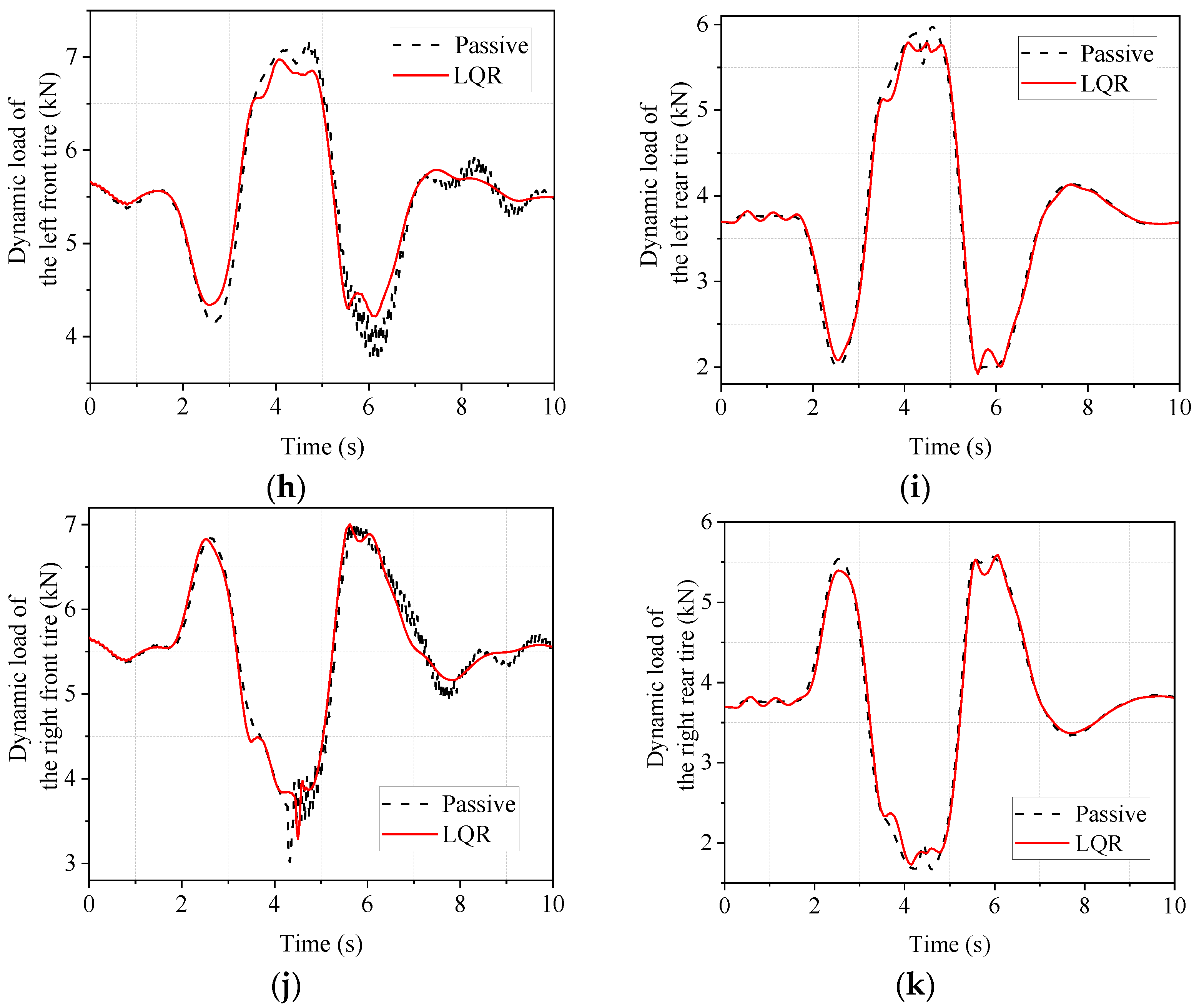
In the double-shift line condition with a low adhesion coefficient, the LQR-controlled electromagnetic active suspension improved the RMS values of the vehicle’s body droop acceleration, body pitch angle acceleration, and body roll angle acceleration by 58.25%, 55.41%, and 31.39%, respectively; and the peak values by 75.63%, 54.11%, and 74.88%, respectively. There is almost no significant change in its dynamic tire load. The LQR-controlled electromagnetic active suspension effectively improves vehicle ride comfort without deteriorating road holding.
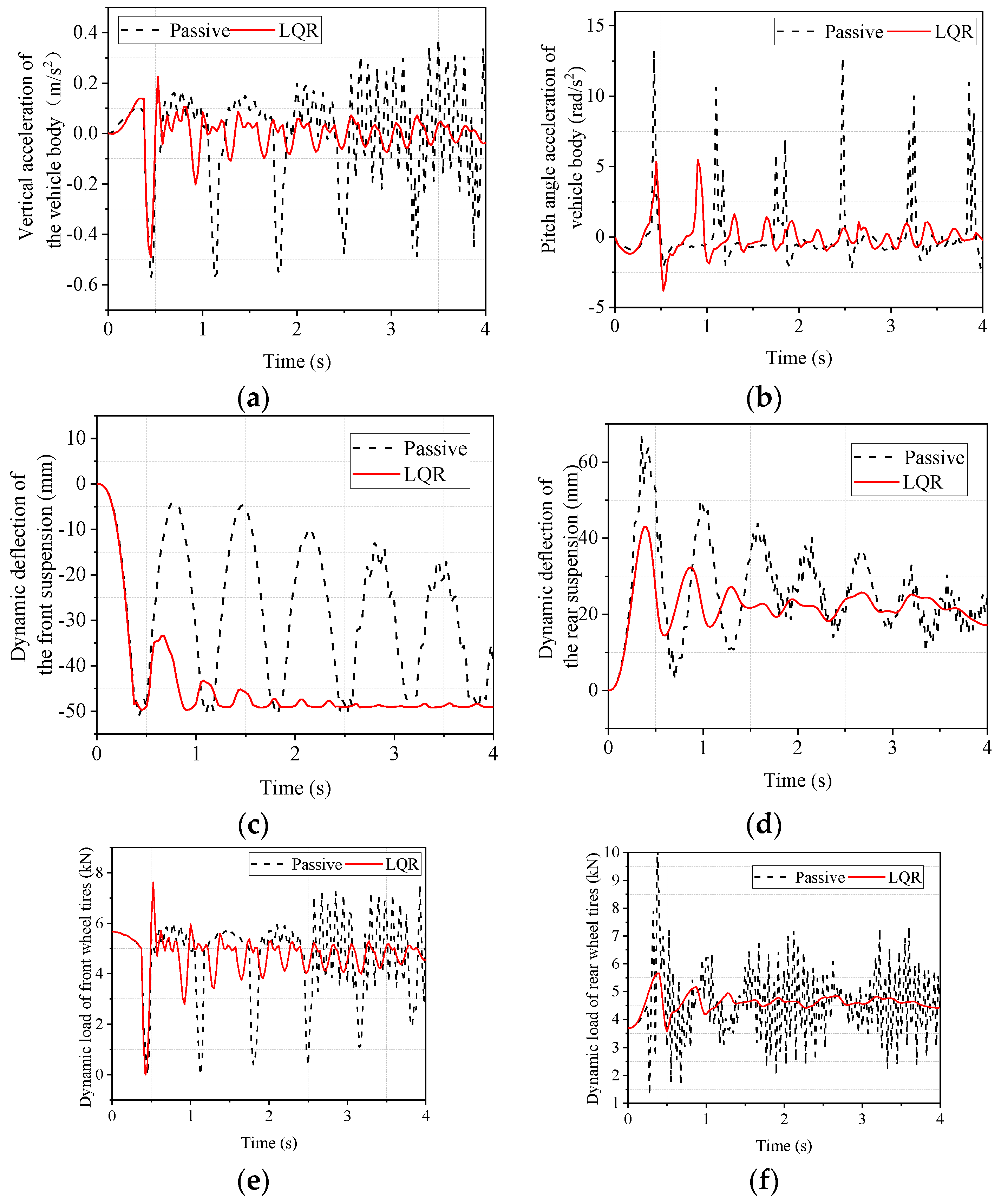
In the emergency acceleration condition, the RMS value of the front suspension dynamic deflection of the vehicle has some deterioration. Still, its peak value has improved, indicating that the LQR-controlled electromagnetic active suspension can effectively avoid collision with the limiting block. In addition, the RMS values of body droop acceleration and pitch angle acceleration improved by 58.54% and 54.13%, respectively. This shows that LQR-controlled electromagnetic active suspension can effectively improve ride comfort.
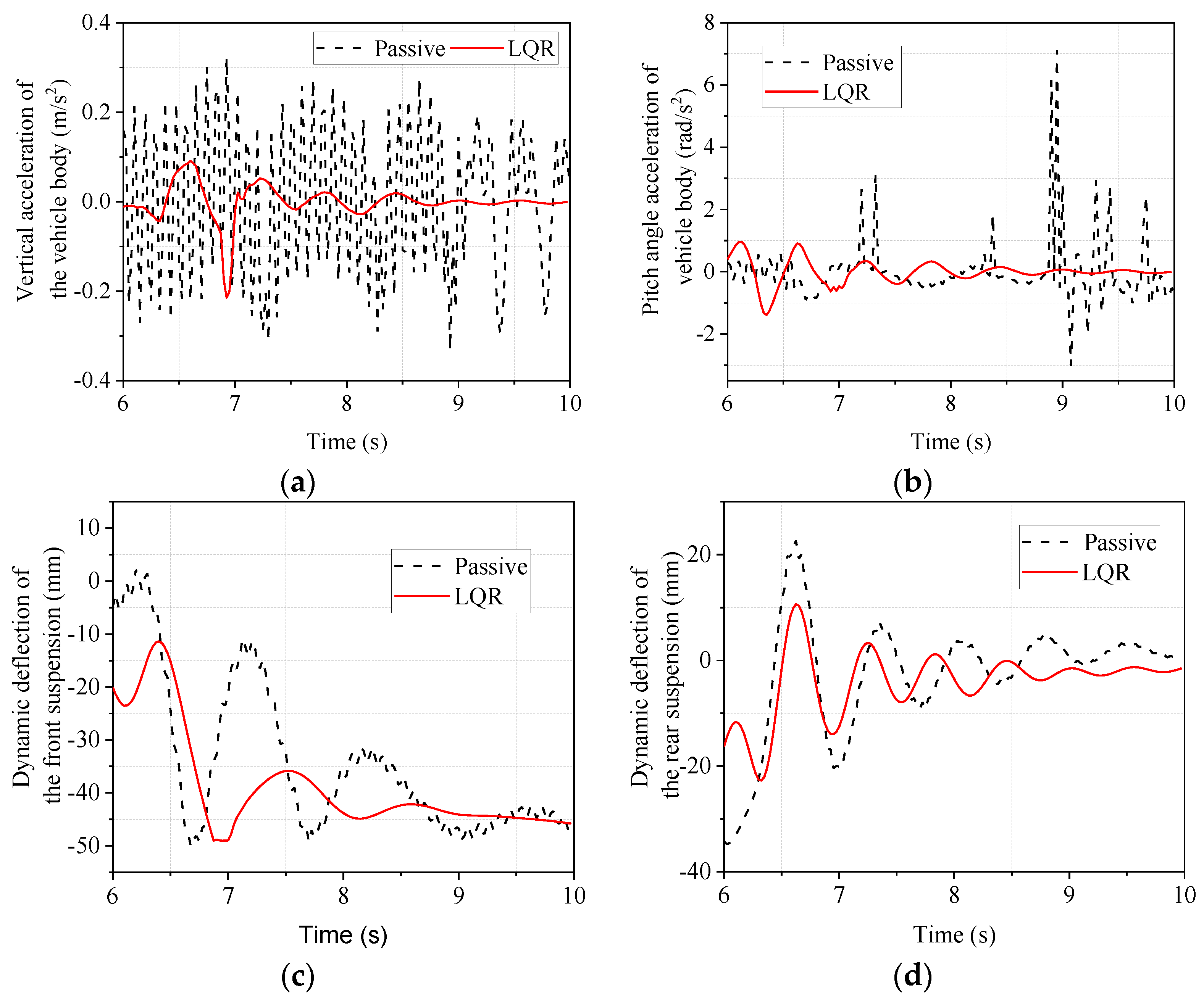
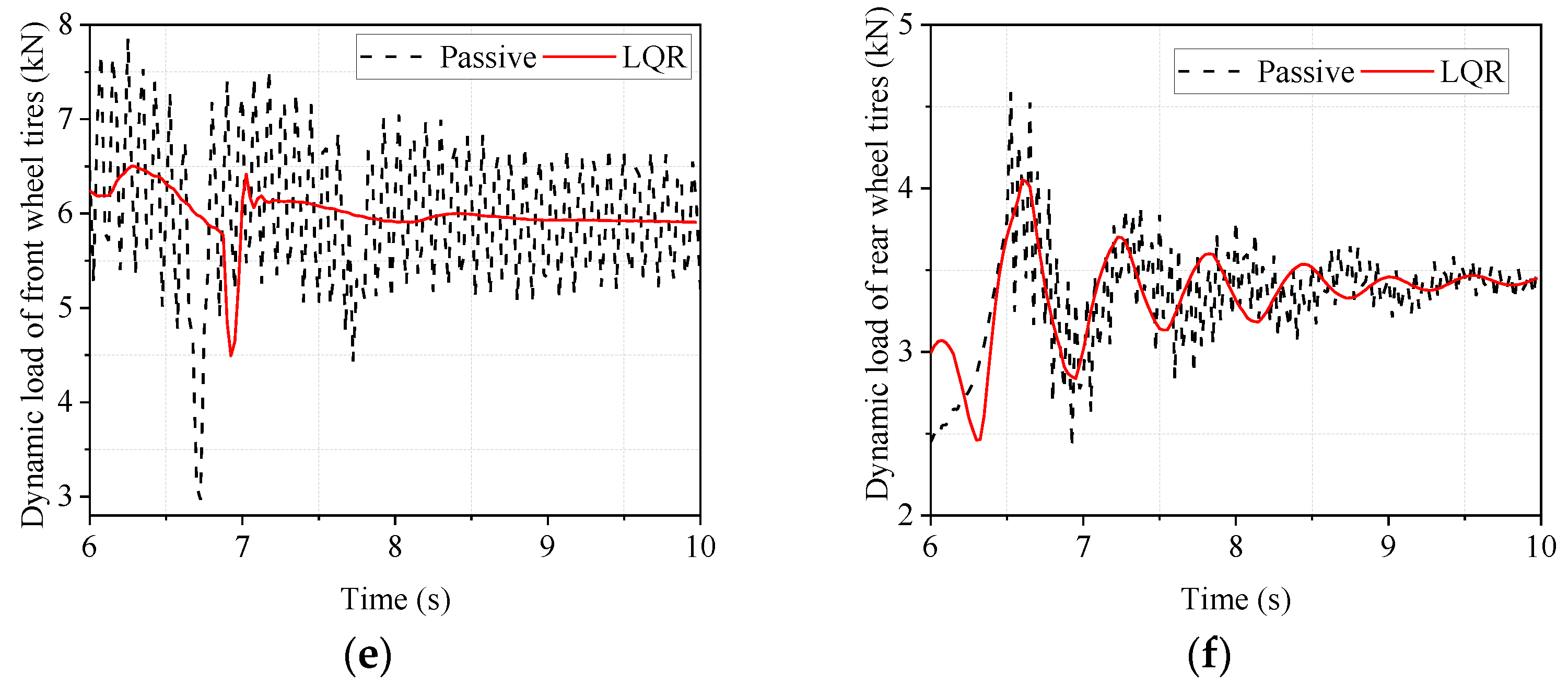
In the emergency braking condition, the RMS value of the front suspension dynamic deflection of the vehicle deteriorated by 7.48%, but its peak value improved by 15.32%, which can effectively prevent the suspension from colliding with the limiting block. The body droop and pitch angle acceleration improved by 76.39% and 64.44%, respectively. Thus, the LQR-controlled electromagnetic active suspension can improve vehicle ride comfort.
This paper presents a vehicle stability study of an LQR-controlled electromagnetic active suspension under extreme operating conditions. The results demonstrate that this control strategy can ensure vehicle stability during extreme operating conditions. This paper’s research results can provide a reference for the lateral stability of vehicles equipped with electromagnetic active suspension systems. In the future, we will design an electromagnetic active suspension system based on the results of this paper. We will study the coupling and control between lateral and longitudinal stability of the whole vehicle electromagnetic active suspension, measure the displacement and acceleration of the suspension using acceleration and laser displacement sensors, and carry out research related to the whole vehicle test verification of the electromagnetic active suspension and in-depth discussion and study of control strategy managerial points.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}