
Common Frame Dynamics for Conically-Constrained Spacecraft Attitude Control


Abstract
:1. Introduction
- Initialize a graph with a distinct vertex at . This represents the initial states (attitude and angular velocity)
- At the iteration, perform a random graph search starting at the kth vertex to determine a set of feasible vertices in the graph .
- Chose a feasible vertex found in the second step that minimizes the cost function. This is the next vertex .
- From this vertex, repeat the second and third step from . Update k to be until the final attitude is obtained.
- Apply the optimal control torque for each attitude trajectory.
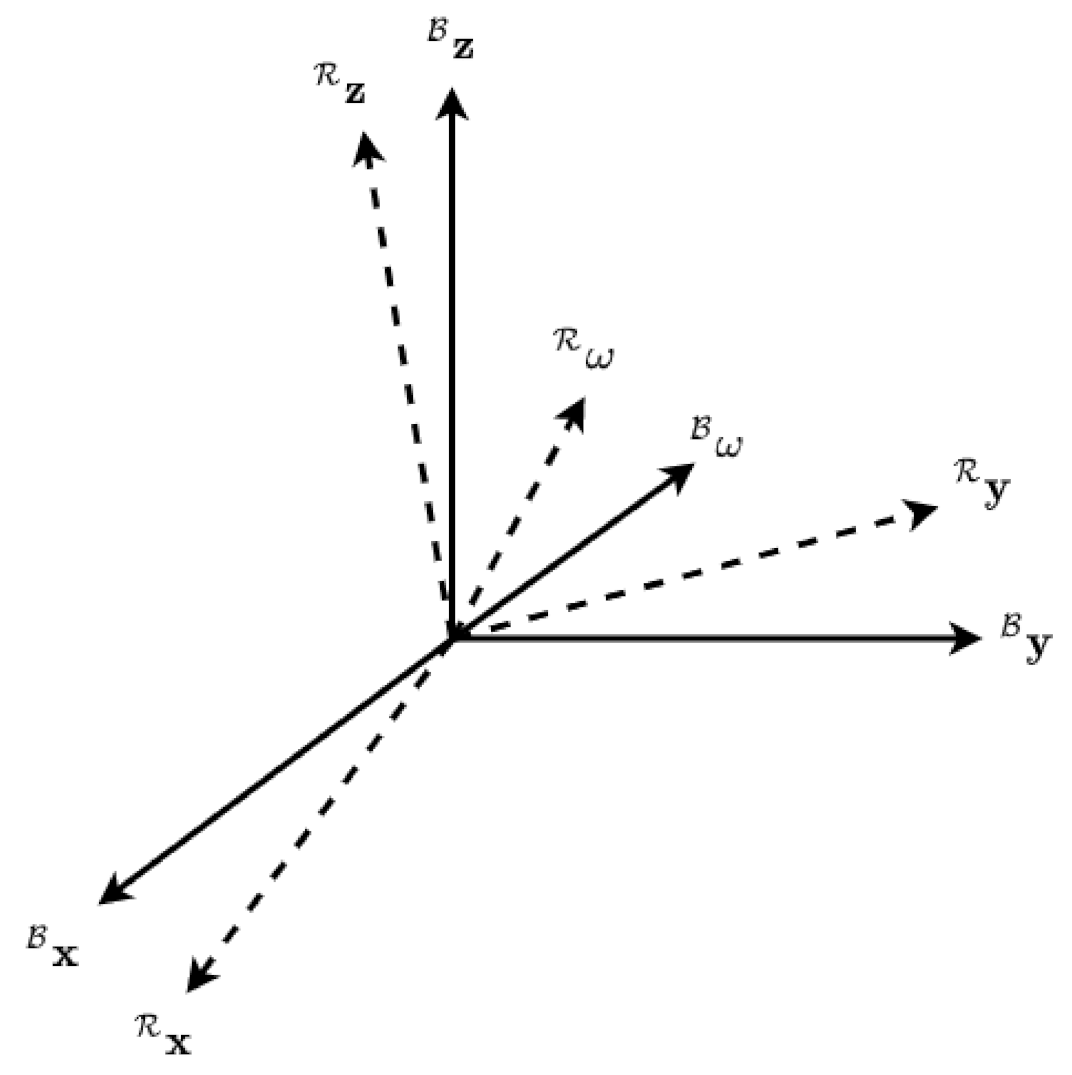
- The paper solves the constrained attitude control problem using common frame dynamics. Hence, a complete elegant constrained attitude control formulation in the common frame dynamics, where the angular velocity is defined in the estimated attitude axes frame. Conventionally, such as in the existing solution by Ramos [20], the problem does not consider the difference of frames between the body frame and the reference frame. It is required to use a different definition of the state error since a spacecraft’s Attitude Determination and Control System (ADCS) does not measure the attitude directly, but by using a set of angles to objects using sensors such as star cameras or sun sensors, while gyroscopes are used to measure angular rates [22]. More accurate sensors were developed during the space age and introduced new technology in Inertial Navigation Systems (INS) called the Inertial Measurement Units (IMUs), consisting of three gyroscopes and three accelerometers [23]. Despite the rise of improved INS sensors, IMUs are well known to drift. One example of this is the Apollo mission’s gyroscopes which drifted at a rate of one milliradian per hour [23]. In addition, since position measurements are only given, the calibration parameters of attitude and gyroscopes are weak since it is dependent on the spacecraft’s motion. In addition, the reference frame, which could be a solution from another spacecraft’s guidance algorithm, also contains the same type of errors as the body frame.
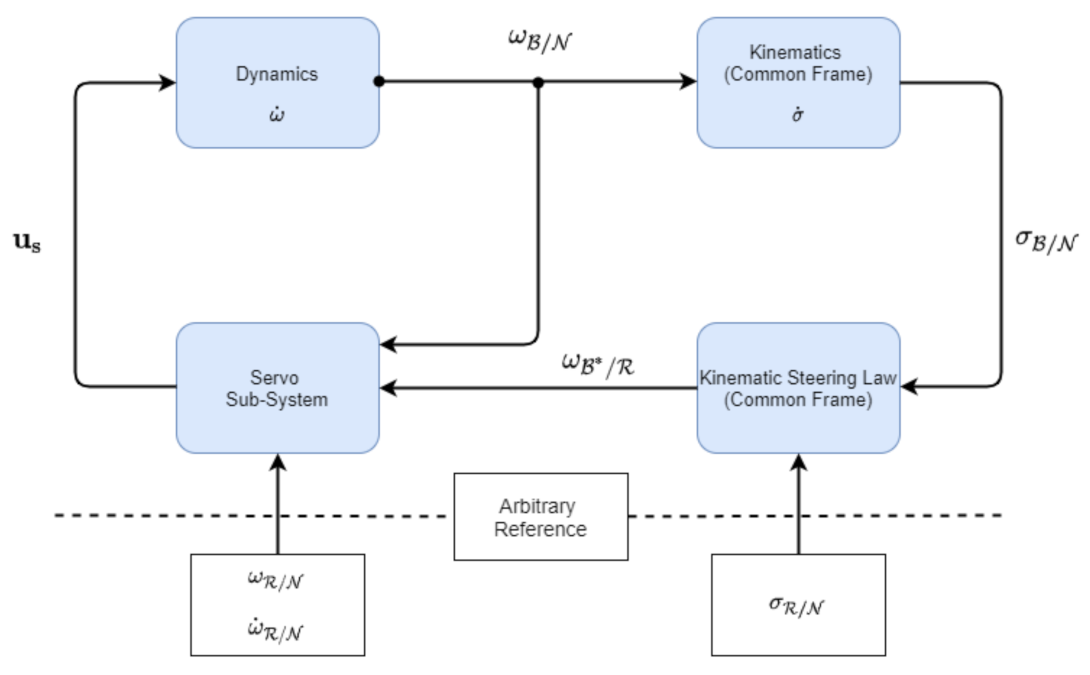
- The paper develops the common frame dynamics in the constrained attitude control problem. Common frame dynamics is introduced in previous work conducted by [20], which uses Modified Rodrigues Parameters (MRP’s) as minimal attitude descriptors. The backstepping control law is adopted to develop the kinematic steering laws and servo subsystem blocks, which simplify the design of the control laws by permitting the division of attitude and angular rates into separate control loops.
- The paper adopts the Lyapunov methods to develop mathematically traceable, closed-form control laws for both subsystems.
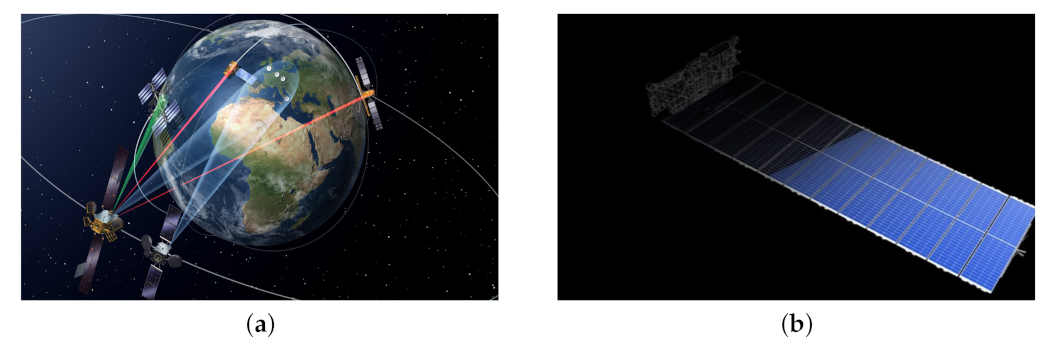
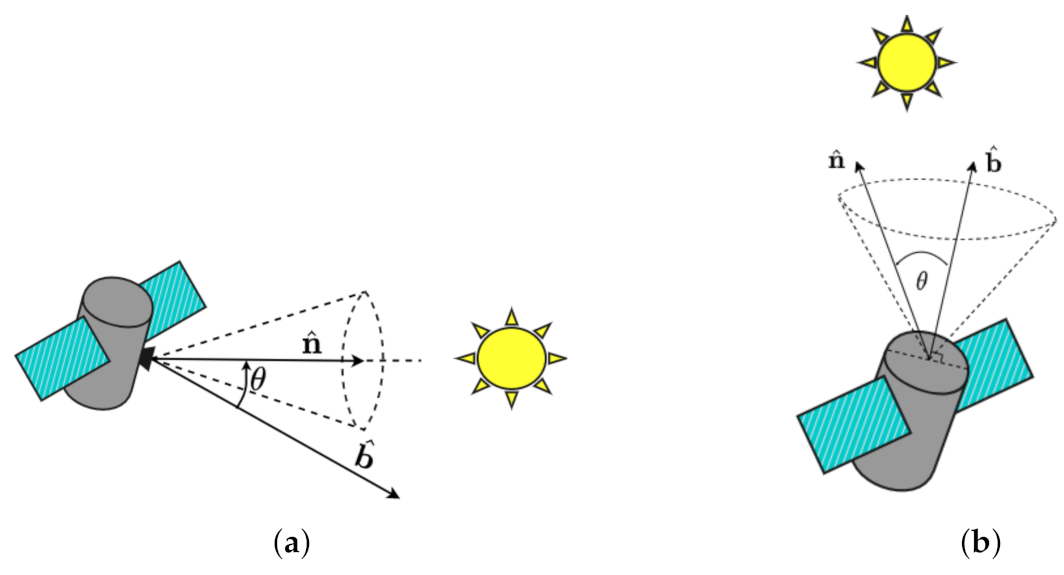
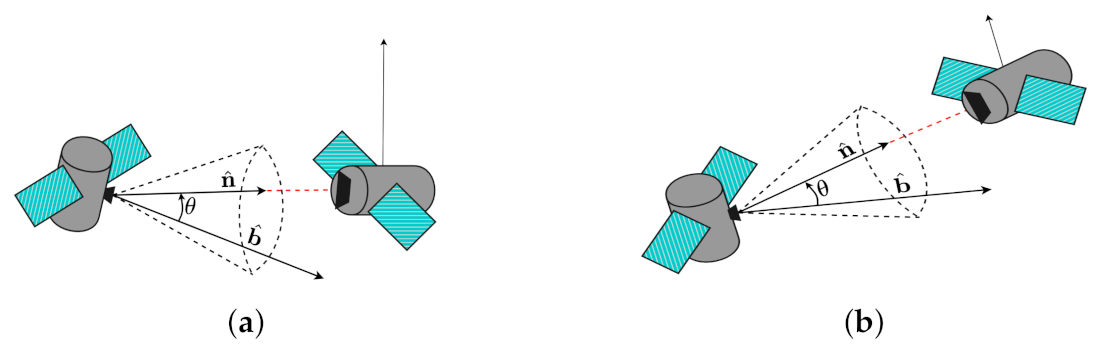
- In addition to implementing common frame dynamics, this paper also extends the constrained tracking problem in presence of dynamic constraints. These types of constraints are important in spacecraft formation flying, such as the European Data Relay System (EDRS) in Figure 3a and the upcoming Starlink satellite constellation with the purpose of providing low-latency satellite internet access globally (Further information can be seen at starlink.com (accessed on 1 March 2020).) in Figure 3b. Each satellite is equipped with a laser communication device and receiver with strict pointing inclusion constraints to transmit data across the constellation.
- The paper presents validation of the algorithm by performing a Monte Carlo analysis on two boresight trajectories under both exclusion constraints and explicitly under exclusion constraints. The constrained tracking problem is also examined in presence of dynamic constraints and exclusion constraints.
2. Common Frame Dynamics
3. Common Frame Control
3.1. Unconstrained Kinematic Steering Law
3.2. Servo-Sub System
4. Attitude Constrained Maneuver
4.1. Static Conic Exclusion and Inclusion Constraints
4.2. Dynamic Conic Exclusion and Inclusion Constraints
4.3. Constrained Attitude Control
4.4. Constrained Kinematic Steering Law Design
- unconstrained, which is given by:
- constrained, which is given by:The parameters and are chosen such that:
5. Results
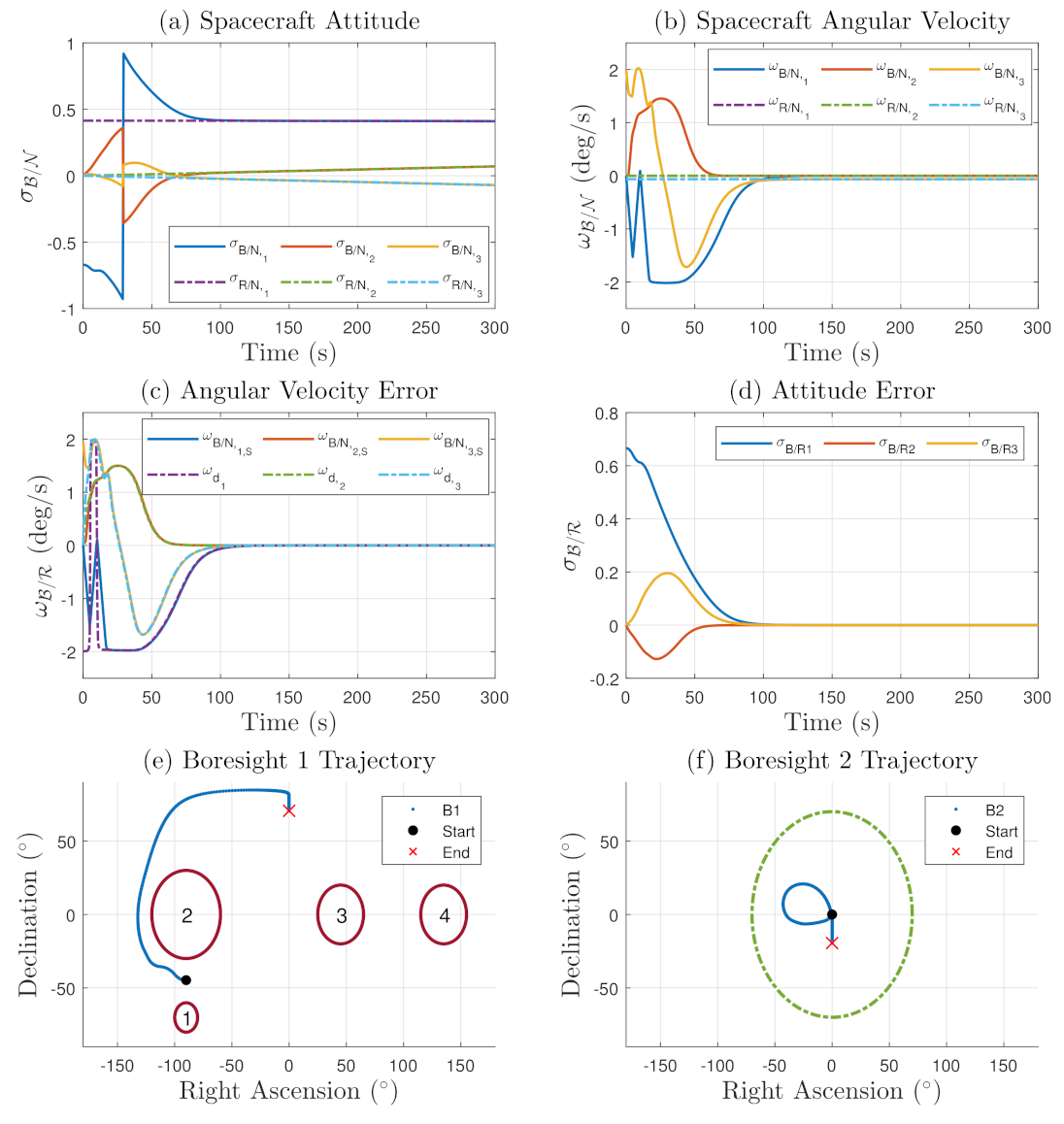
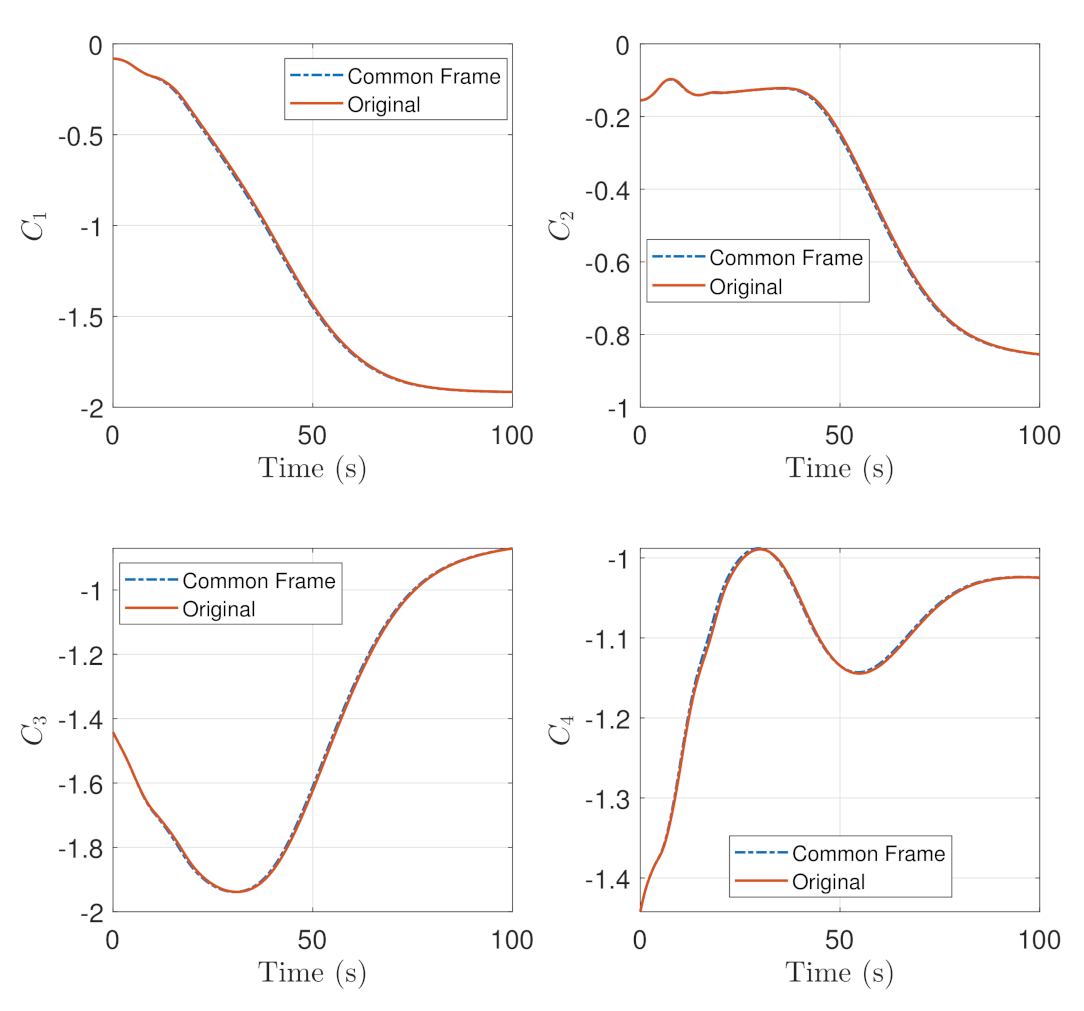
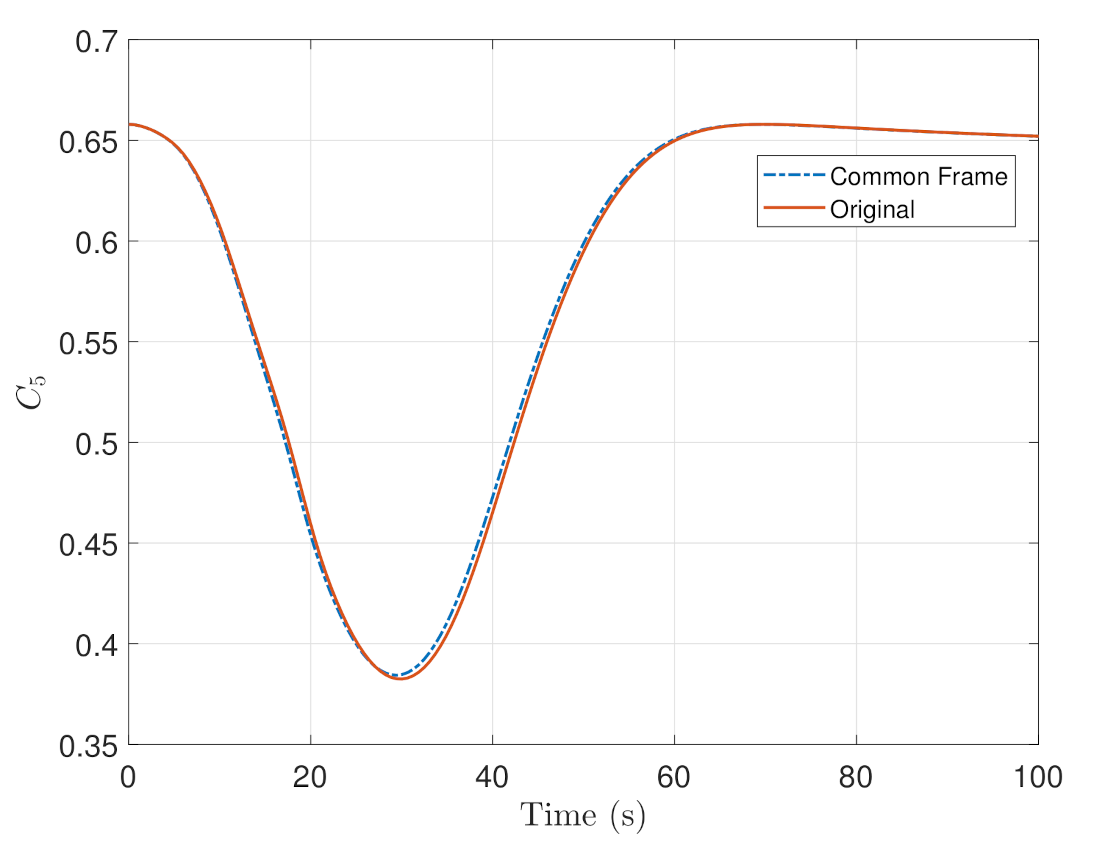
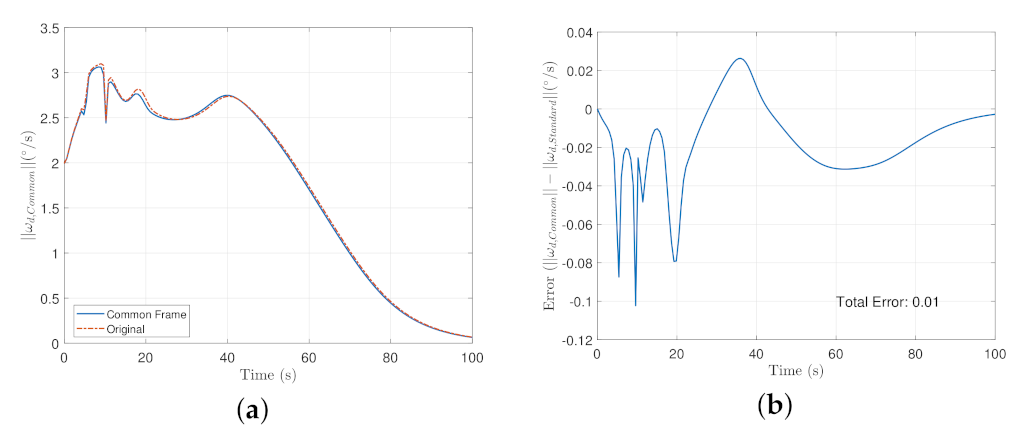
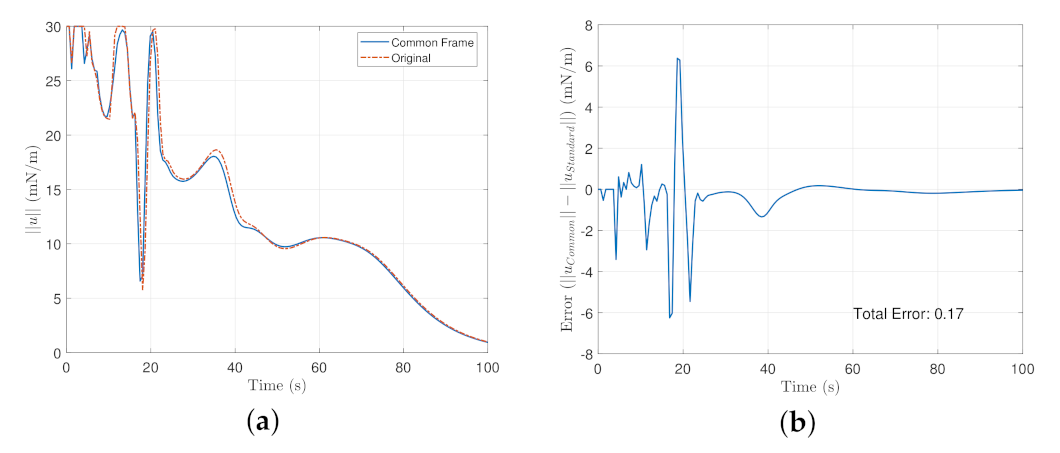
5.1. Analysis of Standard and Common Frame Steering Law and Control Effort
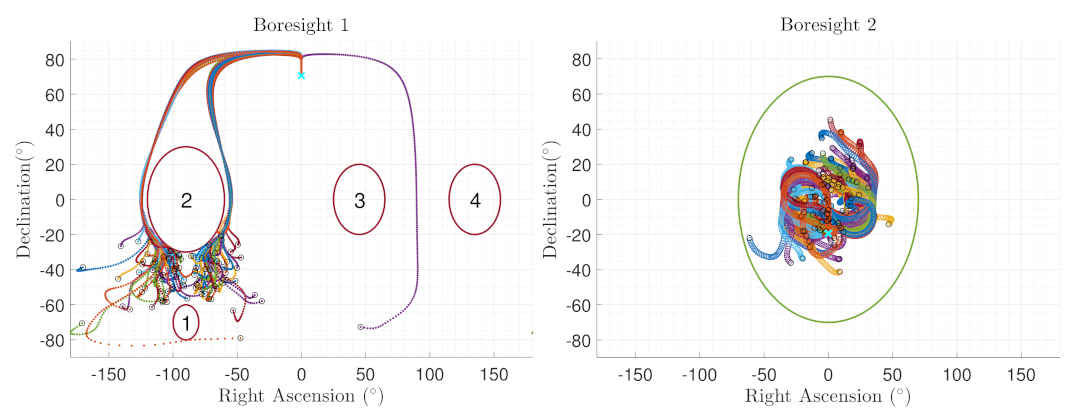
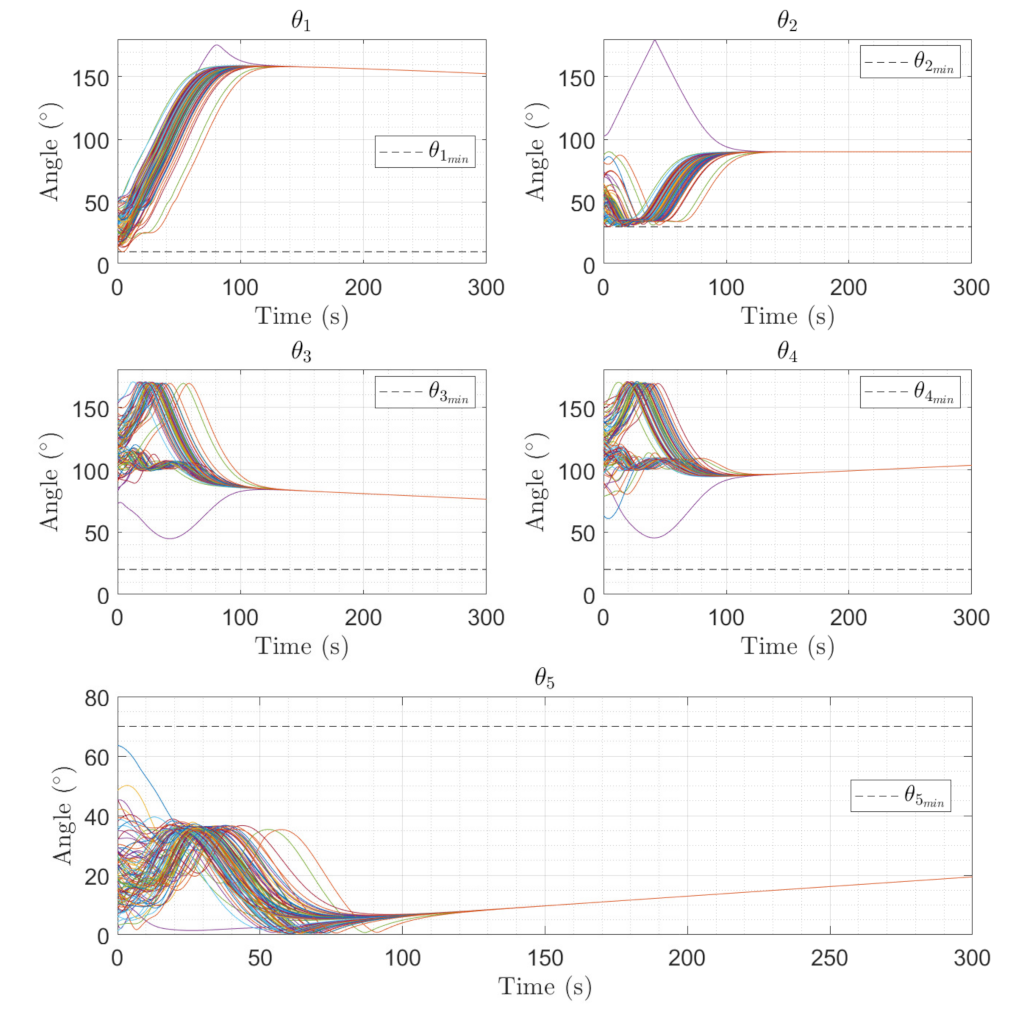
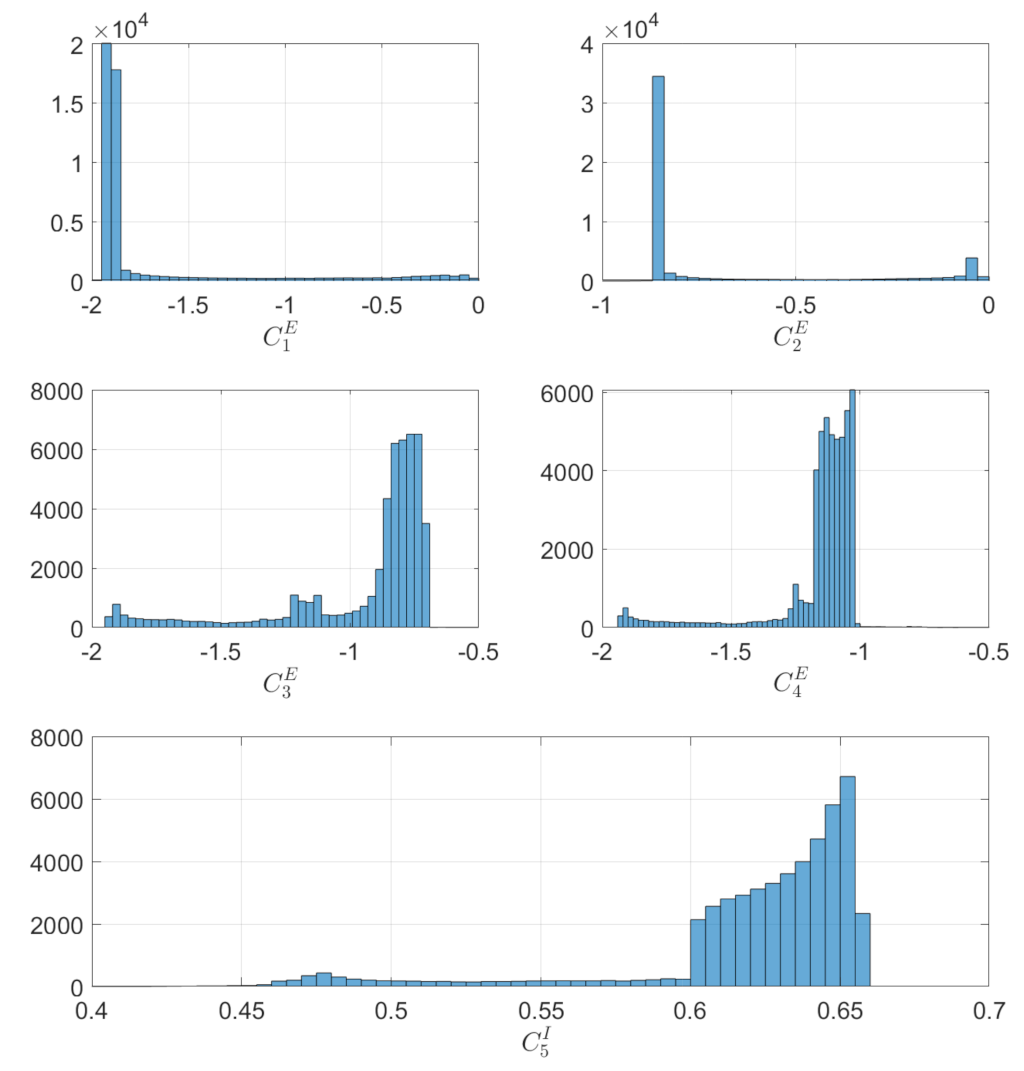
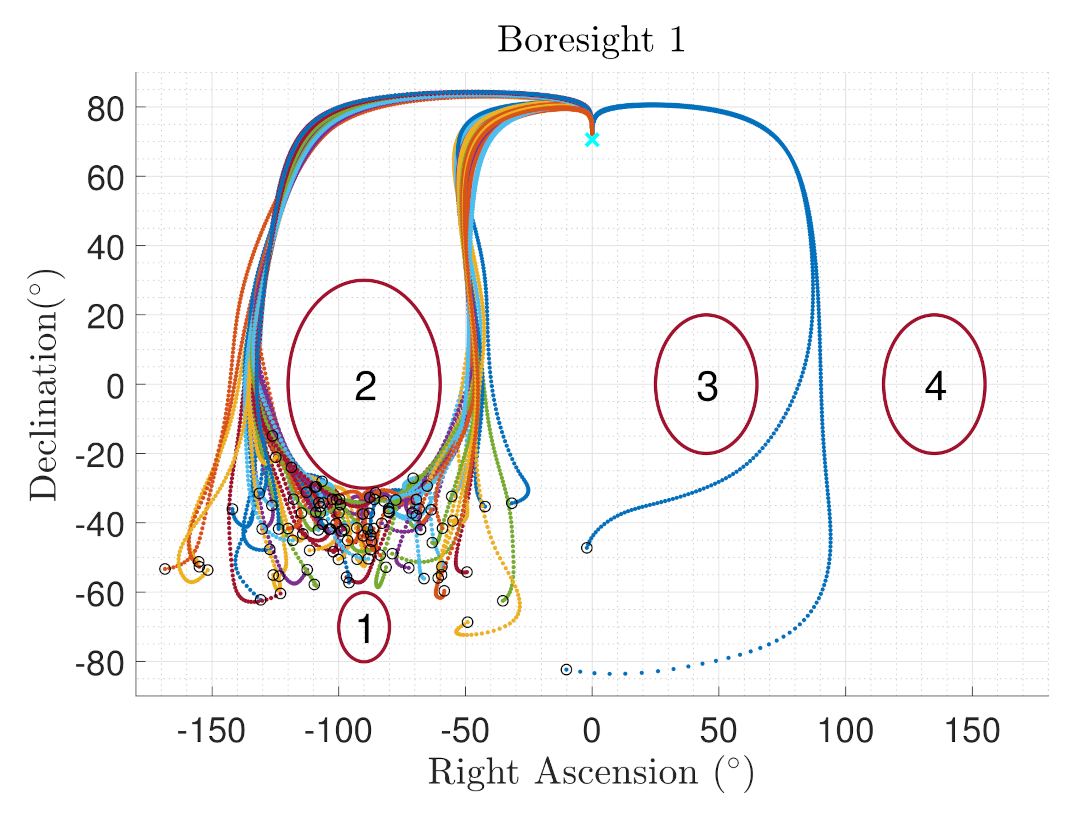
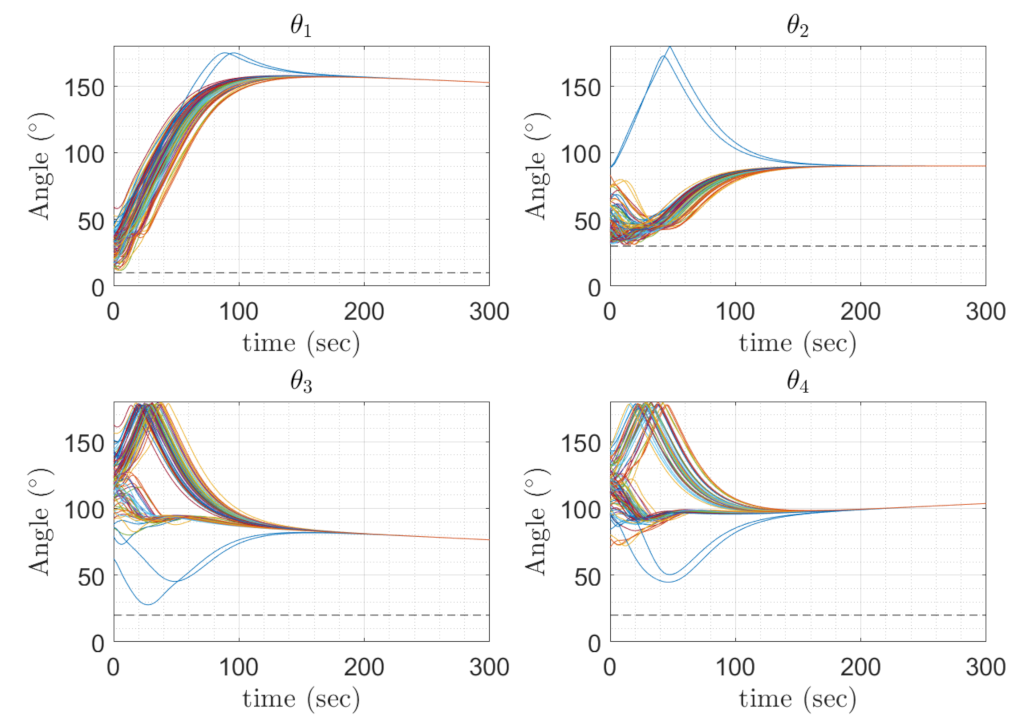
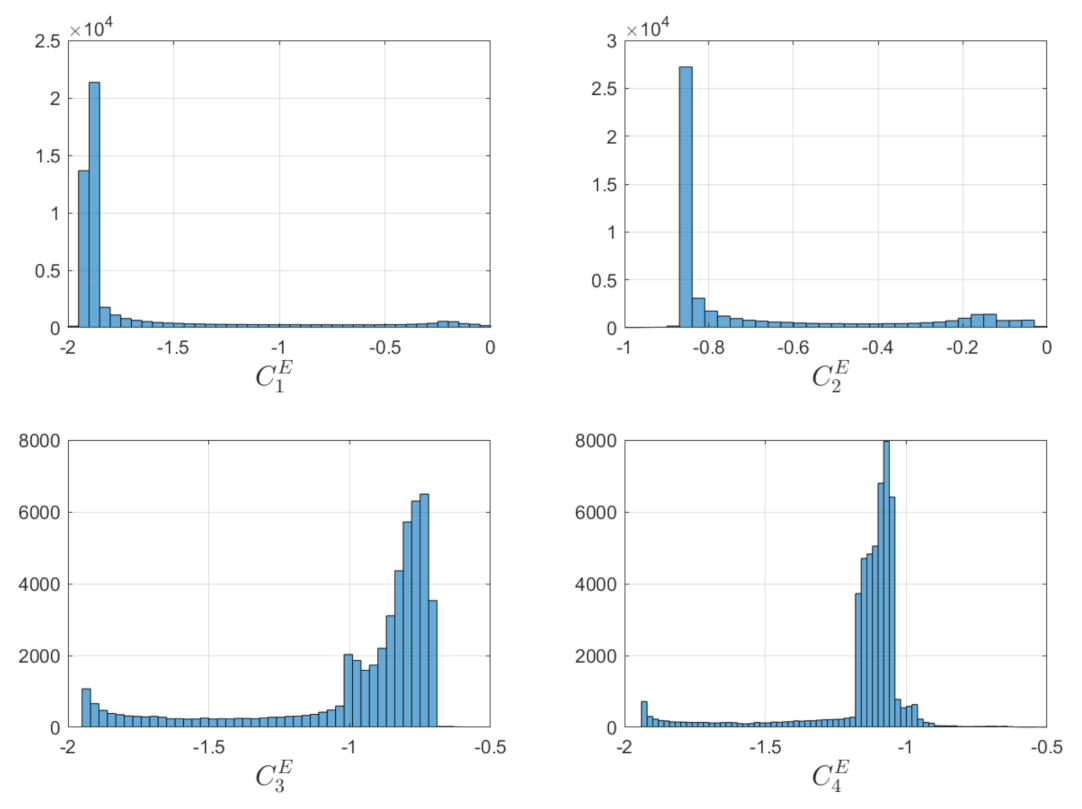
5.2. Monte Carlo Analysis
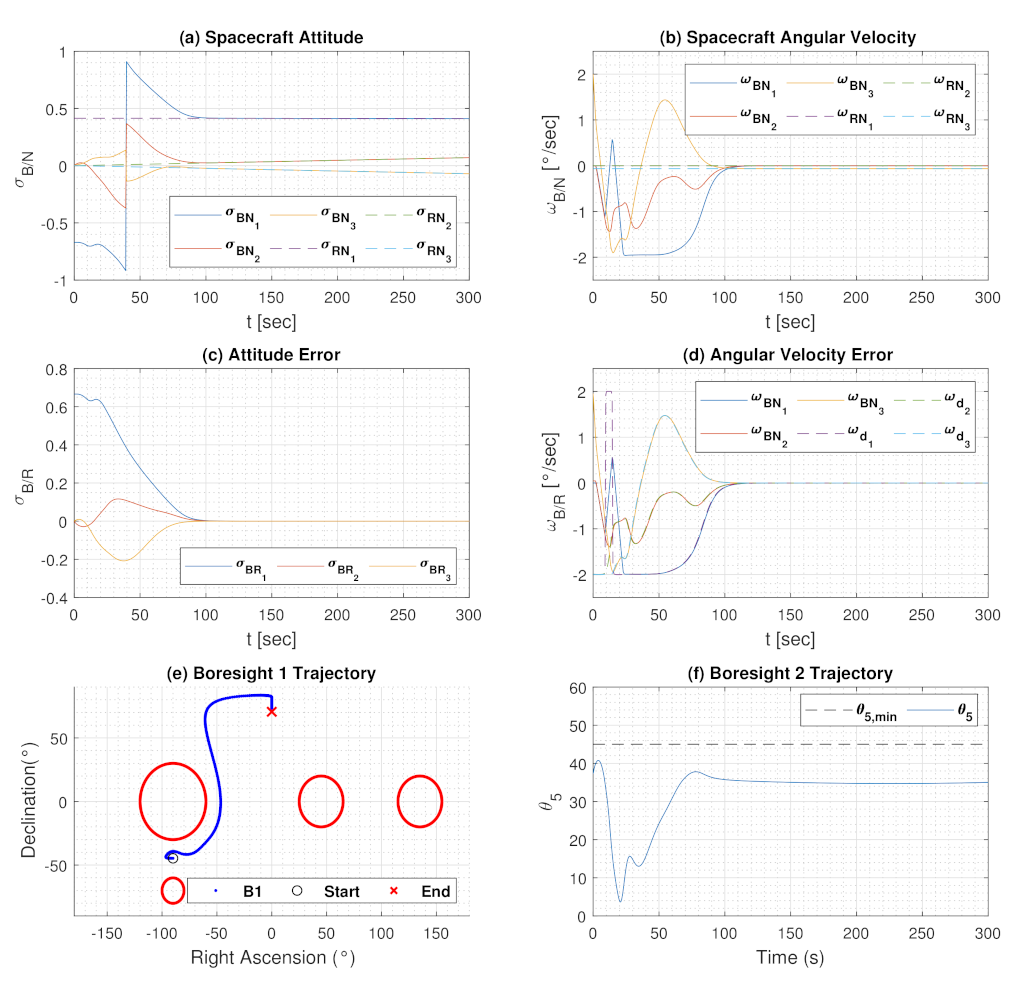
5.3. Dynamic Constraint Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Walsh, A.; Forbes, J. Constrained Attitude Control on SO(3) via Semidefinite Programming. J. Guid. Control. Dyn. 2018, 41, 2483–2488. [Google Scholar] [CrossRef]
- Selva, D.; Krejci, D. A Survey and Assessment of the Capabilities of Cubesats for Earth Observation. Acta Astronaut. 2012, 74, 50–68. [Google Scholar] [CrossRef]
- Wolfe, M.; Osten, R. JWST Primer v3.0. IEEE Aerosp. Conf. 2014, 1–10. [Google Scholar]
- Dempster, M.; Coupé, G. Investigation of the Stability of Satellite Large Angle Attitude Manoeuvres Using Nonlinear Optimiztion Methods. Autom. Control. Space 1982 1983, 16, 111–124. [Google Scholar]
- Cochran, J.; Junkins, J. Large Angle Satellite Attitude Maneuvers. In Flight Mechanics/Estimation Theory Symposium; NASA: Washington, DC, USA, 1975; pp. 116–129. [Google Scholar]
- Wie, B.; Weiss, H.; Arapostathis, A. Quarternion Feedback Regulator for Spacecraft Eigenaxis Rotations. J. Guid. Control. Dyn. 1989, 12, 375–380. [Google Scholar] [CrossRef]
- Horri, N.; Palmer, P.; Roberts, M. Gain-Scheduled Inverse Optimal Satellite Attitude Control. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2437–2457. [Google Scholar] [CrossRef] [Green Version]
- Lo, S.; Chen, Y. Smooth Sliding-Mode Control for Spacecraft Attitude Tracking Maneuvers. J. Guid. Control. Dyn. 1995, 18, 1345–1349. [Google Scholar] [CrossRef]
- Vadali, S.R. Variable-Structure Control of Spacecraft Large-Angle Maneuvers. J. Guid. Control. Dyn. 1986, 9, 235–239. [Google Scholar] [CrossRef]
- Wen, J.; Seereeram, S.; Bayard, D. Nonlinear Predictive Control Applied to Spacecraft Attitude Control. In Proceedings of the 1997 American Control Conference, Albuquerque, NM, USA, 6 June 1997; Volume 3, pp. 1899–1903. [Google Scholar]
- Schaub, H.; Akella, M.; Junkins, J. Adaptive Control of Nonlinear Attitude Motions Realizing Linear Closed Loop Dynamics. J. Guid. Control. Dyn. 2001, 24, 95–100. [Google Scholar] [CrossRef]
- Lee, U.; Mesbahi, M. Spacecraft reorientation in presence of attitude constraints via logarithmic barrier potentials. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 450–455. [Google Scholar]
- Hablani, H.B. Attitude Commands Avoiding Bright Objects and Maintaining Communication with Ground Station. J. Guid. Control. Dyn. 1999, 22, 759–767. [Google Scholar] [CrossRef]
- Kim, Y.; Mesbahi, M.; Singh, G.; Hadaegh, F. On the Convex Parameterization of Constrained Spacecraft Reorientation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1097–1109. [Google Scholar] [CrossRef]
- Frakes, J.P.; Henretty, D.A.; Flatley, T.W.; Markley, F.L.; San, J.K.; Lightsey, E.G. Sampex Science Pointing with Velocity Avoidance. Spacefl. Mech. 1992, 1992, 949–966. [Google Scholar]
- Kim, Y.; Mesbahi, M. Quadratically Constrained Attitude Control via Semidefinite Programming. IEEE Trans. Autom. Control. 2004, 49, 731–735. [Google Scholar] [CrossRef]
- Gurkirpal, S.; Macala, G.; Won, E.; Rasmussen, R. A Constraint Monitor Algorithm for the Cassini Spacecraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Honolulu, HI, USA, 11–13 August 1997; pp. 272–282. [Google Scholar] [CrossRef] [Green Version]
- Feron, E.; Dahleh, M.; Frazzoli, E.; Kornfeld, R. A Randomized Attitude Slew Planning Algorithm for Autonomous Spacecraft. In Proceedings of the AIAA Guidance Navigation, and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar]
- Kim, K.; Kim, Y. Robust Backstepping Control for Slew Maneuver Using Nonlinear Tracking Function. IEEE Trans. Control. Syst. Technol. 2003, 11, 822–829. [Google Scholar]
- Ramos, M.D.; Schaub, H. Kinematic Steering Law for Conically Constrained Torque-Limited Spacecraft Attitude Control. J. Guid. Control. Dyn. 2018, 41, 1990–2001. [Google Scholar] [CrossRef]
- Kulumani, S.; Lee, T. Constrained Geometric Attitude Control on SO(3). Int. J. Control. Autom. Syst. 2017, 15, 2796–2809. [Google Scholar] [CrossRef] [Green Version]
- Andrle, M.S.; Crassidis, J.L. Attitude Estimation Employing Common Frame Error Representations. J. Guid. Control. Dyn. 2015, 38, 1614–1624. [Google Scholar] [CrossRef]
- Whittaker, M.P.; Crassidis, J.L. Inertial Navigation Employing Common Frame Error Representations. In Proceedings of the AIAA Guidance Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef] [Green Version]
- Younes, A.B.; Mortari, D. Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control. Sensors 2019, 19, 4682. [Google Scholar] [CrossRef] [Green Version]
- Younes, A.B.; Mortari, D.; Turner, J.D.; Junkins, J.L. Attitude Error Kinematics. J. Guid. Control. Dyn. 2014, 37, 330–336. [Google Scholar] [CrossRef]
- Shaub, H.; Junkins, J.L. Analytical Mechanics of Space Systems, 4th ed.; AIAA: Reston, VA, USA, 2018; Chapter 3, 4 and 8. [Google Scholar]
- Younes, A.B.; Mortari, D. Attitude Error Kinematics: Applications in Control. In Proceedings of the 26th AAS/AIAA Space Flight Mechanics, Napa, CA, USA, 14–18 February 2016; AAS: Washington, DC, USA, 2016; pp. 16–249. [Google Scholar]
- Younes, A.B.; Mortari, D. Attitude Error Kinematics: Applications in Estimation. In Proceedings of the 26th AAS/AIAA Space Flight Mechanics, Napa, CA, USA, 14–18 February 2016; AAS: Washington, DC, USA, 2016; pp. 16–249. [Google Scholar]
- Younes, A.B.; Turner, J.; Junkins, J.L. A Generic Optimal Control Tracking Solution for Various Attitude Error Parametrizations. Adv. Astronaut. Sci. 2013, 148, 1301–1320. [Google Scholar]
- Younes, A.B.; Turner, J.; Mortari, D.; Junkins, J. A Survey of Attitude Error Representations. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference 2012, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Schaub, H.; Piggott, S. Speed-Constrained Three-Axes Attitude Control Using Kinematic Steering. Acta Astronaut. 2018, 147, 1–8. [Google Scholar] [CrossRef]
- Cruz, A.C.H. Common Frame Dynamics for Conically-Constrained Spacecraft Attitude Control. Master’s Thesis, San Diego State University, San Diego, CA, USA, 2020. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameter | Value |
|---|---|
| Earth Radius | 6378.0 km |
| Earth Gravitational Parameter | 398,600.00 kms |
| Right Ascension of ascending node | |
| Inclination | |
| Orbital Altitude | 400 km |
| Initial argument of Latitude |
| Description | Variable | Value |
|---|---|---|
| Spacecraft Inertia Tensor | diag km · m | |
| Max Angular Velocity | 2 /s | |
| RW Parameters | diag km · m | |
| 15 mN · m | ||
| rpm | ||
| Control Gains | 10 | |
| 0.01 | ||
| Smoothing Constants | 0.1 | |
| Exclusion Constraints | , | , |
| , | , | |
| , | , | |
| , | , | |
| Inclusion Constraints | , | , |
| Moving Average Window | 0.5 s |
| Description | Value |
|---|---|
| Attitude Variance | 0.1 |
| Angular Velocity Variance | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Christopher Cruz, A.; Bani Younes, A. Common Frame Dynamics for Conically-Constrained Spacecraft Attitude Control. Sensors 2022, 22, 10003. https://doi.org/10.3390/s222410003
Christopher Cruz A, Bani Younes A. Common Frame Dynamics for Conically-Constrained Spacecraft Attitude Control. Sensors. 2022; 22(24):10003. https://doi.org/10.3390/s222410003
Chicago/Turabian StyleChristopher Cruz, Arnold, and Ahmad Bani Younes. 2022. "Common Frame Dynamics for Conically-Constrained Spacecraft Attitude Control" Sensors 22, no. 24: 10003. https://doi.org/10.3390/s222410003