
Emergency Braking Evoked Brain Activities during Distracted Driving


Abstract
:1. Introduction
2. Materials and Methods
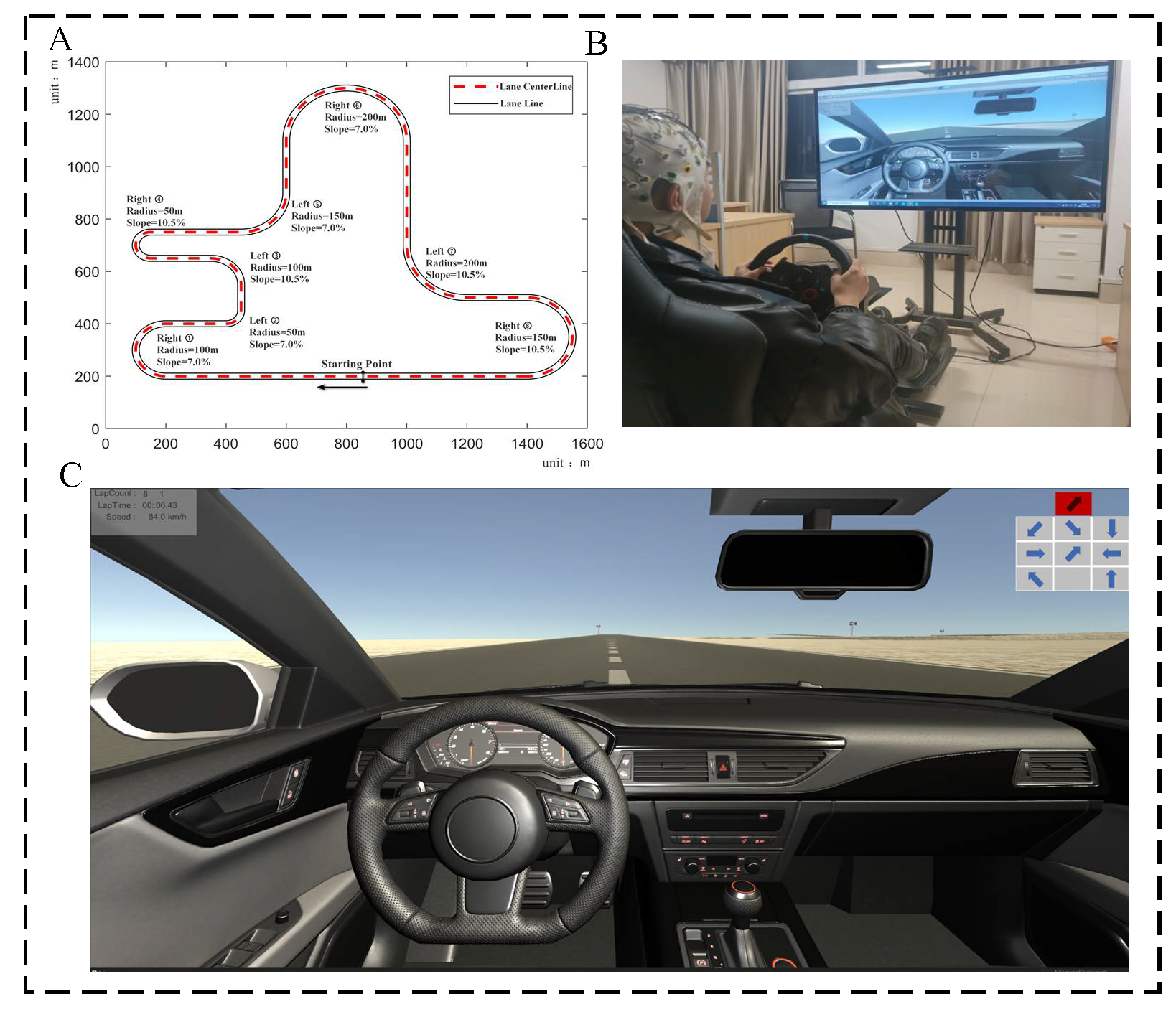
2.1. Experiments
2.1.1. Subjects
2.1.2. Experimental Device
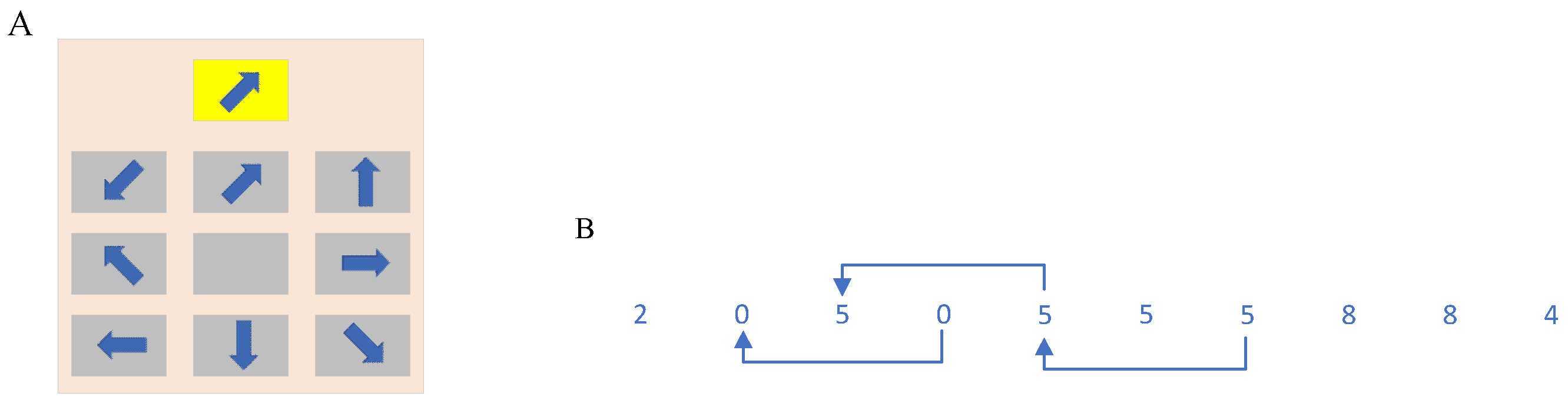
2.1.3. Experimental Paradigm
2.2. Data Acquisition and Preprocessing
2.3. Data Processing
3. Results
3.1. Emergency Braking Activates Brain Areas in Four Driving Conditions
3.2. Differences in Brain Area Activation between Distracted Driving Emergency Braking and Normal Driving
3.3. Differences in Brain Area Activation between Distracted and Normal Driving Emergency Braking
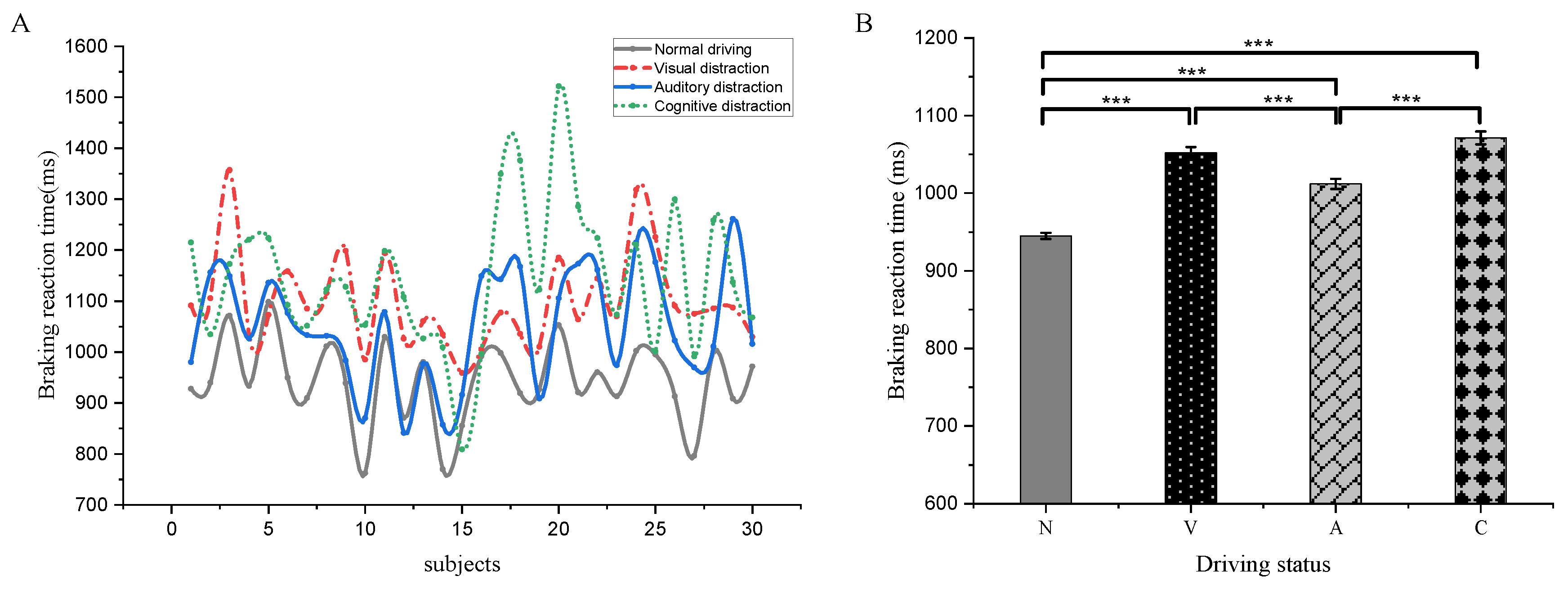
3.4. Braking Response Time Differences between Distracted and Normal Driving Emergency Braking
4. Discussion
4.1. Emergency Braking Activates Brain Areas in Normal Driving Condition
4.2. Emergency Braking Neural Activation in Visual Distraction
4.3. Emergency Braking Neural Activation in Auditory Distraction
4.4. Neural Activation of Emergency Braking in Cognitive Distraction
4.5. Distracted Driving Emergency Braking Brain Area Activation and Braking Reaction Time
4.6. Limitations of the Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, H.K.; Bi, L.Z.; Teng, T. Neural correlates and detection of braking intention under critical situations based on the power spectra of electroencephalography signals. Sci. China-Inf. Sci. 2020, 63, 119202. [Google Scholar] [CrossRef] [Green Version]
- Heimes, F.; Nagel, H.H. Towards active machine-vision-based driver assistance for urban areas. Int. J. Comput. Vis. 2002, 50, 5–34. [Google Scholar] [CrossRef]
- Enkelmann, W. Video-based driver assistance-from basic functions to applications. Int. J. Comput. Vis. 2001, 45, 201–221. [Google Scholar] [CrossRef]
- Matuszyk, L.; Zelinsky, A.; Nilsson, L.; Rilbe, M. Stereo panoramic vision for monitoring vehicle blind-spots. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 31–36. [Google Scholar]
- Gavrila, D.M. Sensor-based pedestrian protection. IEEE Intell. Syst. 2001, 16, 77–81. [Google Scholar] [CrossRef]
- Gandhi, T.; Trivedi, M.M. Vehicle surround capture: Survey of techniques and a novel omni-video-based approach for dynamic panoramic surround maps. IEEE Trans. Intell. Transp. Syst. 2006, 7, 293–308. [Google Scholar] [CrossRef]
- Gandhi, T.; Trivedi, M.M.; IEEE. Vehicle mounted wide FOV stereo for traffic and pedestrian detection. In Proceedings of the IEEE International Conference on Image Processing (ICIP 2005), Genoa, Italy, 11–14 September 2005; pp. 2425–2428. [Google Scholar]
- Trivedi, M.M.; Cheng, S.Y. Holistic sensing and active displays for intelligent driver support systems. Computer 2007, 40, 60. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Bouraoui, L.; Garcia, R.; Parent, M.; Sotelo, M.A. Interoperable Control Architecture for Cybercars and Dual-Mode Cars. IEEE Trans. Intell. Transp. Syst. 2009, 10, 146–154. [Google Scholar] [CrossRef]
- Diederichs, F.; Schuttke, T.; Spath, D.; IEEE. Driver Intention Algorithm for Pedestrian Protection and Automated Emergency Braking Systems. In Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1049–1054. [Google Scholar]
- McCall, J.C.; Trivedi, M.M. Driver behavior and situation aware brake assistance for intelligent vehicles. Proc. IEEE 2007, 95, 374–387. [Google Scholar] [CrossRef]
- Tran, C.; Doshi, A.; Trivedi, M.M.; IEEE. Pedal Error Prediction by Driver Foot Gesture Analysis: A Vision-based Inquiry. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 577–582. [Google Scholar]
- Tran, C.; Doshi, A.; Trivedi, M.M. Modeling and prediction of driver behavior by foot gesture analysis. Comput. Vis. Image Underst. 2012, 116, 435–445. [Google Scholar] [CrossRef]
- Haufe, S.; Treder, M.S.; Gugler, M.F.; Sagebaum, M.; Curio, G.; Blankertz, B. EEG potentials predict upcoming emergency brakings during simulated driving. J. Neural. Eng. 2011, 8, 056001. [Google Scholar] [CrossRef]
- Kim, I.H.; Kim, J.W.; Haufe, S.; Lee, S.W. Detection of braking intention in diverse situations during simulated driving based on EEG feature combination. J. Neural. Eng. 2015, 12, 016001. [Google Scholar] [CrossRef] [PubMed]
- Haufe, S.; Kim, J.W.; Kim, I.H.; Sonnleitner, A.; Schrauf, M.; Curio, G.; Blankertz, B. Electrophysiology-based detection of emergency braking intention in real-world driving. J. Neural. Eng. 2014, 11, 56011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, I.H.; Kim, J.W.; Haufe, S.; Lee, S.W.; IEEE. Detection of Multi-Class Emergency Situations during Simulated Driving from ERP. In Proceedings of the IEEE International Winter Workshop on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 18–20 February 2013; pp. 49–51. [Google Scholar]
- Teng, T.; Bi, L.Z.; Fan, X.A.; IEEE. Using EEG to Recognize Emergency Situations for Brain-controlled Vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium, Seoul, Republic of Korea, 28 June–1 July; pp. 1305–1309.
- Teng, T.; Bi, L.Z.; IEEE. A Novel EEG-based Detection Method of Emergency Situations for Assistive Vehicles. In Proceedings of the 7th International Conference on Information Science and Technology (ICIST), Da Nang, Vietnam, 16–19 April 2017; pp. 335–339. [Google Scholar]
- Teng, T.; Bi, L.Z.; Liu, Y.L. EEG-Based Detection of Driver Emergency Braking Intention for Brain-Controlled Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1766–1773. [Google Scholar] [CrossRef]
- Kim, J.W.; Suk, H.I.; Kim, J.P.; Lee, S.W.; IEEE. Combined Regression and Classification Approach for Prediction of Driver's Braking Intention. In Proceedings of the 3rd International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 12–14 January 2015; pp. 49–51. [Google Scholar]
- Kim, J.-W.; Kim, I.-H.; Lee, S.-W.; IEEE. Decision of Braking Intensity during Simulated Driving based on Analysis of Neural Correlates. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 4129–4132. [Google Scholar]
- Wang, H.K.; Fei, W.J.; Bi, L.Z.; IEEE. Neural Signature and Classification of Emergency Braking Intention Based on Effective Connectivity. In Proceedings of the Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2559–2562. [Google Scholar]
- Antony, M.J.; Sankaralingam, B.P.; Mahendran, R.K.; Gardezi, A.A.; Shafiq, M.; Choi, J.G.; Hamam, H. Classification of EEG Using Adaptive SVM Classifier with CSP and Online Recursive Independent Component Analysis. Sensors 2022, 22, 7596. [Google Scholar] [CrossRef]
- Wang, X.G.; Bi, L.Z.; Fei, W.J.; Lian, J.L.; Wang, H.K.; IEEE. EEG-based Universal Prediction Model of Emergency Braking Intention for Brain-controlled Vehicles. In Proceedings of the 9th IEEE/EMBS International Conference on Neural Engineering (NER), San Francisco, CA, USA, 20–23 March 2019; pp. 389–392. [Google Scholar]
- Nguyen, T.H.; Chung, W.Y. Detection of Driver Braking Intention Using EEG Signals During Simulated Driving. Sensors 2019, 19, 2863. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.M.; Kim, J.W.; Lee, S.W.; IEEE. Detecting Driver's Braking Intention using Recurrent Convolutional Neural Networks based EEG Analysis. In Proceedings of the 4th IAPR Asian Conference on Pattern Recognition (ACPR), Nanjing, China, 26–29 November 2017; pp. 840–845. [Google Scholar]
- Hernandez, L.G.; Mozos, O.M.; Ferrandez, J.M.; Antelis, J.M. EEG-Based Detection of Braking Intention Under Different Car Driving Conditions. Front. Neuroinformatics 2018, 12, 29. [Google Scholar] [CrossRef]
- Bouchner, P.; Faber, J.; Novotny, S.; Tichy, T. Driver’s attention level improvement with use of biofeedback stimulation incorporated into driving simulator. Neural Netw. World 2009, 19, 109–118. [Google Scholar]
- Schweizer, T.A.; Kan, K.R.; Hung, Y.W.; Tam, F.; Naglie, G.; Graham, S.J. Brain activity during driving with distraction: An immersive fMRI study. Front. Hum. Neurosci. 2013, 7, 53. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baulk, S.D.; Reyner, L.A.; Horne, J.A. Driver sleepiness—Evaluation of reaction time measurement as a secondary task. Sleep 2001, 24, 695–698. [Google Scholar] [CrossRef]
- Lal, S.K.L.; Craig, A. Driver fatigue: Electroencephalography and psychological assessment. Psychophysiology 2002, 39, 313–321. [Google Scholar] [CrossRef]
- Wester, A.E.; Bockner, K.B.E.; Volkerts, E.R.; Verster, J.C.; Kenemans, J.L. Event-related potentials and secondary task. performance during simulated driving. Accid. Anal. Prev. 2008, 40, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Borghini, G.; Astolfi, L.; Vecchiato, G.; Mattia, D.; Babiloni, F. Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci. Biobehav. Rev. 2014, 44, 58–75. [Google Scholar] [CrossRef]
- Peres, M.; Van De Moortele, P.F.; Pierard, C.; Lehericy, S.; Satabin, P.; Le Bihan, D.; Guezennec, C.Y. Functional magnetic resonance imaging of mental strategy in a simulated aviation performance task. Aviat. Space Environ. Med. 2000, 71, 1218–1231. [Google Scholar] [PubMed]
- Walter, H.; Vetter, S.C.; Grothe, J.; Wunderlich, A.P.; Hahn, S.; Spitzer, M. The neural correlates of driving. Neuroreport 2001, 12, 1763. [Google Scholar] [CrossRef]
- Calhoun, V.D.; Pekar, J.J.; McGinty, V.B.; Adali, T.; Watson, T.D.; Pearlson, G.D. Different activation dynamics in multiple neural systems during simulated driving. Hum. Brain Mapp. 2002, 16, 158–167. [Google Scholar] [CrossRef] [PubMed]
- Uchiyama, Y.; Ebe, K.; Kozato, A.; Okada, T.; Sadato, N. The neural substrates of driving at a safe distance: A functional MRI study. Neurosci. Lett. 2003, 352, 199–202. [Google Scholar] [CrossRef] [PubMed]
- Spiers, H.J.; Maguire, E.A. Neural substrates of driving behaviour. Neuroimage 2007, 36, 245–255. [Google Scholar] [CrossRef] [Green Version]
- Calhoun, V.D.; Pearlson, G.D. A selective review of simulated driving studies: Combining naturalistic and hybrid paradigms, analysis approaches, and future directions. Neuroimage 2012, 59, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Kan, K.; Schweizer, T.A.; Tam, F.; Graham, S.J. Methodology for functional MRI of simulated driving. Med. Phys. 2013, 40, 012301. [Google Scholar] [CrossRef]
- Choi, M.H.; Kim, H.S.; Yoon, H.J.; Lee, J.C.; Baek, J.H.; Choi, J.S.; Tack, G.R.; Min, B.C.; Lim, D.W.; Chung, S.C. Increase in brain activation due to sub-tasks during driving: fMRI study using new MR-compatible driving simulator. J. Physiol. Anthropol. 2017, 36, 11. [Google Scholar] [CrossRef] [Green Version]
- Callan, A.M.; Osu, R.; Yamagishi, Y.; Callan, D.E.; Inoue, N. Neural correlates of resolving uncertainty in driver's decision making. Hum. Brain Mapp. 2009, 30, 2804–2812. [Google Scholar] [CrossRef]
- Graydon, F.X.; Young, R.; Benton, M.; Richard, I.I.; Posse, S.; Li, H.; Green, C. Visual event detection during simulated driving: Identifying the neural correlates with functional neuroimaging. Transp. Res. Part F Psychol. Behav. 2004, 7, 271–286. [Google Scholar] [CrossRef]
- Just, M.A.; Keller, T.A.; Cynkar, J. A decrease in brain activation associated with driving when listening to someone speak. Brain Res. 2008, 1205, 70–80. [Google Scholar] [CrossRef] [Green Version]
- Hsieh, L.; Young, R.A.; Bowyer, S.M.; Moran, J.E.; Genik, R.J., 2nd; Green, C.C.; Chiang, Y.R.; Yu, Y.J.; Liao, C.C.; Seaman, S. Conversation effects on neural mechanisms underlying reaction time to visual events while viewing a driving scene: fMRI analysis and asynchrony model. Brain Res. 2009, 1251, 162–175. [Google Scholar] [CrossRef] [PubMed]
- Uchiyama, Y.; Toyoda, H.; Sakai, H.; Shin, D.; Ebe, K.; Sadato, N. Suppression of brain activity related to a car-following task with an auditory task: An fMRI study. Transp. Res. Part F-Traffic Psychol. Behav. 2012, 15, 25–37. [Google Scholar] [CrossRef]
- Chung, S.C.; Choi, M.H.; Kim, H.S.; You, N.R.; Hong, S.P.; Lee, J.C.; Park, S.J.; Baek, J.H.; Jeong, U.H.; You, J.H.; et al. Effects of distraction task on driving: A functional magnetic resonance imaging study. Bio-Med. Mater. Eng. 2014, 24, 2971–2977. [Google Scholar] [CrossRef] [Green Version]
- Al-Hashimi, O.; Zanto, T.P.; Gazzaley, A. Neural sources of performance decline during continuous multitasking. Cortex 2015, 71, 49–57. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Wang, B.; Xu, G.; Wang, W.; Liu, Z.; Li, Z. Functional connectivity analysis using fNIRS in healthy subjects during prolonged simulated driving. Neurosci. Lett. 2017, 640, 21–28. [Google Scholar] [CrossRef]
- Fort, A.; Martin, R.; Jacquet-Andrieu, A.; Combe-Pangaud, C.; Foliot, G.; Daligault, S.; Delpuech, C. Attentional demand and processing of relevant visual information during simulated driving: A MEG study. Brain Res. 2010, 1363, 117–127. [Google Scholar] [CrossRef]
- Sasai, S.; Boly, M.; Mensen, A.; Tononi, G. Functional split brain in a driving/listening paradigm. Proc. Natl. Acad. Sci. USA 2016, 113, 14444–14449. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bowyer, S.M.; Hsieh, L.; Moran, J.E.; Young, R.A.; Manoharan, A.; Liao, C.-c.J.; Malladi, K.; Yu, Y.-J.; Chiang, Y.-R.; Tepley, N. Conversation effects on neural mechanisms underlying reaction time to visual events while viewing a driving scene using MEG. Brain Res. 2009, 1251, 151–161. [Google Scholar] [CrossRef]
- Engström, J.; Johansson, E.; Östlund, J. Effects of visual and cognitive load in real and simulated motorway driving. Transp. Res. Part F Traffic Psychol. Behav. 2005, 8, 97–120. [Google Scholar] [CrossRef]
- Liang, Y.; Lee, J.D. Combining cognitive and visual distraction: Less than the sum of its parts. Accid. Anal. Prev. 2010, 42, 881–890. [Google Scholar] [CrossRef]
- Ungerleider, L.G.; Mishkin, M. Two cortical visual systems. In The Analysis of Visual Behavior; Ingle, D.J., Goodale, M.A., Mansfield, R.J.W., Eds.; MIT Press: Cambridge, MA, USA, 1982; pp. 549–586. [Google Scholar]
- Baldauf, D.; Desimone, R. Neural Mechanisms of Object-Based Attention. Science 2014, 344, 424–427. [Google Scholar] [CrossRef] [PubMed]
- Lafer-Sousa, R.; Conway, B.R. Parallel, multi-stage processing of colors, faces and shapes in macaque inferior temporal cortex. Nat. Neurosci. 2013, 16, 1870–1878. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Corbetta, M.; Shulman, G.L. Human cortical mechanisms of visual attention during orienting and search. Philos. Trans. R. Soc. London. Ser. B Biol. Sci. 1998, 353, 1353–1362. [Google Scholar] [CrossRef] [Green Version]
- Singh-Curry, V.; Husain, M. The functional role of the inferior parietal lobe in the dorsal and ventral stream dichotomy. Neuropsychologia 2009, 47, 1434–1448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vogt, B.A.; Pandya, D.N. Cingulate cortex of the rhesus monkey: II. Cortical afferents. J. Comp. Neurol. 1987, 262, 271–289. [Google Scholar] [CrossRef]
- Vogt, B.A.; Laureys, S. The primate posterior cingulate gyrus: Connections, sensorimotor orientation, gateway to limbic processing. Cingulate neurobiology and disease. 2009, 275–308. [Google Scholar]
- Vogt, B.A.; Finch, D.M.; Olson, C.R. Functional heterogeneity in cingulate cortex: The anterior executive and posterior evaluative regions. Cerebral. Cortex (New York, N.Y. 1991) 1992, 2, 435–443. [Google Scholar] [CrossRef]
- Kounios, J.; Frymiare, J.L.; Bowden, E.M.; Fleck, J.I.; Subramaniam, K.; Parrish, T.B.; Jung-Beeman, M. The prepared mind—Neural activity prior to problem presentation predicts subsequent solution by sudden insight. Psychol. Sci. 2006, 17, 882–890. [Google Scholar] [CrossRef] [PubMed]
- Mason, M.F.; Norton, M.I.; Van Horn, J.D.; Wegner, D.M.; Grafton, S.T.; Macrae, C.N. Wandering minds: The default network and stimulus-independent thought. Science 2007, 315, 393–395. [Google Scholar] [CrossRef] [PubMed]
- Hayden, B.Y.; Nair, A.C.; McCoy, A.N.; Platt, M.L. Posterior Cingulate Cortex Mediates Outcome-Contingent Allocation of Behavior. Neuron 2008, 60, 19–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gusnard, D.A.; Raichle, M.E. Searching for a baseline: Functional imaging and the resting human brain. Nat. Rev. Neurosci. 2001, 2, 685–694. [Google Scholar] [CrossRef]
- Hampson, M.; Driesen, N.R.; Skudlarski, P.; Gore, J.C.; Constable, R.T. Brain connectivity related to working memory performance. J. Neurosci. 2006, 26, 13338–13343. [Google Scholar] [CrossRef] [Green Version]
- Hahn, B.; Ross, T.J.; Stein, E.A. Cingulate activation increases dynamically with response speed under stimulus unpredictability. Cereb. Cortex 2007, 17, 1664–1671. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Li, S.G.; Li, Y.H.; Wang, M.; Zhang, C.Y.; Li, Y.Y.; Yao, J.; Ji, H. Analysis of braking intention based on fNIRS in driving simulation experiments. IET Intell. Transp. Syst. 2019, 13, 1181–1189. [Google Scholar] [CrossRef]
- Japee, S.; Holiday, K.; Satyshur, M.D.; Mukai, I.; Ungerleider, L.G. A role of right middle frontal gyrus in reorienting of attention: A case study. Front. Syst. Neurosci. 2015, 9, 23. [Google Scholar] [CrossRef] [Green Version]
- Shulman, G.L.; Astafiev, S.V.; Franke, D.; Pope, D.L.W.; Snyder, A.Z.; McAvoy, M.P.; Corbetta, M. Interaction of Stimulus-Driven Reorienting and Expectation in Ventral and Dorsal Frontoparietal and Basal Ganglia-Cortical Networks. J. Neurosci. 2009, 29, 4392–4407. [Google Scholar] [CrossRef] [Green Version]
- Doricchi, F.; Macci, E.; Silvetti, M.; Macaluso, E. Neural Correlates of the Spatial and Expectancy Components of Endogenous and Stimulus-Driven Orienting of Attention in the Posner Task. Cereb. Cortex 2010, 20, 1574–1585. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, J.T.; Gimbel, S.I.; Harris, S. Neural correlates of maintaining one's political beliefs in the face of counterevidence. Sci. Rep. 2016, 6, 39589. [Google Scholar] [CrossRef] [Green Version]
- Brust, J. The Human Frontal Lobes: Functions and Disorders. Neurol. 2007, 13, 389–390. [Google Scholar] [CrossRef]
- Hale, B.; Fiorello, C.A. School Neuropsychology: A Practitioner's Handbook; Guilford Publications: New York, NY, USA, 2017. [Google Scholar]
- Mechelli, A.; Humphreys, G.W.; Mayall, K.; Olson, A.; Price, C.J. Differential effects of word length and visual contrast in the fusiform and lingual gyri during reading. Proc. R. Soc. B-Biol. Sci. 2000, 267, 1909–1913. [Google Scholar] [CrossRef]
- Karnath, H.O. New insights into the functions of the superior temporal cortex. Nat. Rev. Neurosci. 2001, 2, 568–576. [Google Scholar] [CrossRef]
- Choi, J.; Cho, H.; Choi, J.S.; Choi, I.Y.; Chun, J.W.; Kim, D.J. The neural basis underlying impaired attentional control in problematic smartphone users. Transl. Psychiatry 2021, 11, 129. [Google Scholar] [CrossRef]
- Gisselgård, J.; Petersson, K.M.; Baddeley, A.; Ingvar, M. The irrelevant speech effect: A PET study. Neuropsychologia 2003, 41, 1899–1911. [Google Scholar] [CrossRef] [Green Version]
- Gisselgard, J.; Petersson, K.M.; Ingvar, M. The irrelevant speech effect and working memory load. Neuroimage 2004, 22, 1107–1116. [Google Scholar] [CrossRef] [Green Version]
- Tzourio, N.; Massioui, F.E.; Crivello, F.; Joliot, M.; Renault, B.; Mazoyer, B. Functional anatomy of human auditory attention studied with PET. Neuroimage 1997, 5, 63–77. [Google Scholar] [CrossRef]
- Cohen, J.D.; Forman, S.D.; Braver, T.S.; Casey, B.J.; Servan-Schreiber, D.; Noll, D.C. Activation of the prefrontal cortex in a nonspatial working memory task with functional MRI. Hum. Brain Mapp. 1994, 1, 293–304. [Google Scholar] [CrossRef]
- Tomita, N.; Imai, S.; Kanayama, Y.; Kawashima, I.; Kumano, H. Use of Multichannel Near Infrared Spectroscopy to Study Relationships Between Brain Regions and Neurocognitive Tasks of Selective/Divided Attention and 2-Back Working Memory. Percept. Mot. Ski. 2017, 124, 703–720. [Google Scholar] [CrossRef]
- Collette, F.; Linden, M.; Laureys, S.; Arigoni, F.; Delfiore, G.; Degueldre, C.; Luxen, A.; Salmon, E. Mapping the Updating Process: Common and Specific Brain Activations Across Different Versions of the Running Span Task. Cortex 2007, 43, 146–158. [Google Scholar] [CrossRef] [Green Version]
- Miller, E.K.; Cohen, J.D. An integrative theory of prefrontal cortex function. Annu. Rev. Neurosci. 2001, 24, 167–202. [Google Scholar] [CrossRef] [PubMed]
- Husain, M.; Rorden, C. Non-spatially lateralized mechanisms in hemispatial neglect. Nat. Rev. Neurosci. 2003, 4, 26–36. [Google Scholar] [CrossRef]
- Sack, A.T. Parietal cortex and spatial cognition. Behav. Brain Res. 2009, 202, 153–161. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MNI-Space Coordinates | kE | T | Hemisphere | Region | |||
|---|---|---|---|---|---|---|---|
| x | y | z | |||||
| Emergency braking in normal driving | 46 | −4 | −34 | 39,965 | 24.71 | R | Inferior temporal gyrus |
| −48 | −70 | 32 | 232 | 8.25 | L | Angular gyrus | |
| 0 | −32 | 24 | 150 | 5.89 | L | Posterior cingulate gyrus | |
| −30 | 6 | −16 | 83 | 4.79 | L | Superior temporal gyrus | |
| Emergency braking in visual distraction driving | 44 | 50 | 4 | 5360 | 20.97 | R | Middle frontal gyrus |
| −44 | 0 | −34 | 6255 | 20.74 | L | Inferior temporal gyrus | |
| −16 | 62 | 6 | 4188 | 19.21 | L | Superior frontal gyrus, dorsolateral | |
| 44 | −4 | −32 | 5567 | 17.97 | R | Inferior temporal gyrus | |
| 64 | −10 | 20 | 750 | 8.66 | R | Postcentral gyrus | |
| −12 | 2 | 66 | 283 | 7.99 | L | Supplementary motor area | |
| −60 | −18 | 24 | 543 | 7.73 | L | Postcentral gyrus | |
| −12 | −24 | 74 | 206 | 7.57 | L | Paracentral lobule | |
| 8 | −22 | 72 | 516 | 7.55 | R | Paracentral lobule | |
| −52 | −42 | 26 | 164 | 5.61 | L | Supramarginal gyrus | |
| −22 | 22 | −20 | 186 | 5.29 | L | Inferior frontal gyrus, orbital part | |
| Emergency braking in auditory distraction driving | 46 | −4 | −34 | 5446 | 20.72 | R | Inferior temporal gyrus |
| −20 | 62 | 6 | 4540 | 19.01 | L | Superior frontal gyrus, dorsolateral | |
| 14 | 62 | 6 | 5376 | 18.56 | R | Superior frontal gyrus, medial | |
| −44 | −2 | −34 | 6045 | 18.23 | L | Inferior temporal gyrus | |
| −62 | −10 | 24 | 976 | 10.17 | L | Postcentral gyrus | |
| 64 | −8 | 18 | 929 | 10.10 | R | Postcentral gyrus | |
| 10 | −18 | 72 | 621 | 9.85 | R | Supplementary motor area | |
| −12 | −24 | 74 | 640 | 9.14 | L | Paracentral lobule | |
| 40 | −68 | 46 | 245 | 7.46 | R | Angular gyrus | |
| −28 | −68 | 52 | 197 | 6.86 | L | Superior parietal gyrus | |
| 62 | −40 | 22 | 132 | 5.82 | R | Superior temporal gyrus | |
| Emergency braking in cognitive distraction driving | 44 | 50 | 4 | 6376 | 26.65 | R | Middle frontal gyrus |
| −42 | 0 | −34 | 6369 | 23.47 | L | Inferior temporal gyrus | |
| 46 | −4 | −36 | 6456 | 22.53 | R | Inferior temporal gyrus | |
| −16 | 62 | 4 | 5164 | 21.11 | L | Superior frontal gyrus, dorsolateral | |
| −62 | −12 | 24 | 1002 | 10.69 | L | Postcentral gyrus | |
| 56 | −20 | 26 | 1219 | 10.35 | R | Supramarginal gyrus | |
| 40 | −16 | 38 | 403 | 8.76 | R | Postcentral gyrus | |
| 12 | −26 | 68 | 359 | 8.13 | R | Paracentral lobule | |
| −12 | −26 | 74 | 527 | 7.41 | L | Paracentral lobule | |
| −54 | −62 | 8 | 201 | 7.03 | L | Middle temporal gyrus | |
| −30 | −68 | 50 | 138 | 6.05 | L | Superior parietal gyrus | |
| 40 | −68 | 46 | 140 | 5.94 | R | Angular gyrus | |
| 10 | 4 | 68 | 107 | 5.08 | R | Supplementary motor area | |
| MNI-Space Coordinates | kE | T | Hemisphere | Region | |||
|---|---|---|---|---|---|---|---|
| x | y | z | |||||
| Emergency braking in normal driving vs. normal driving | −46 | −78 | −10 | 9386 | 12.60 | L | Inferior occipital gyrus |
| 6 | −24 | 70 | 1689 | 8.90 | R | Paracentral lobule | |
| −6 | 10 | 66 | 367 | 8.64 | L | Supplementary motor areas | |
| 8 | 12 | 64 | 260 | 8.60 | R | Supplementary motor areas | |
| −42 | 38 | −14 | 778 | 8.37 | L | Inferior frontal gyrus, orbital part | |
| −22 | −62 | 62 | 1978 | 8.09 | L | Superior parietal gyrus | |
| 44 | 46 | 8 | 1763 | 7.58 | R | Middle frontal gyrus | |
| 52 | −32 | 30 | 464 | 6.60 | R | Supramarginal gyrus | |
| 40 | −16 | 36 | 677 | 6.59 | R | Postcentral gyrus | |
| −36 | −24 | 48 | 493 | 6.57 | L | Postcentral gyrus | |
| 58 | −4 | −4 | 358 | 6.02 | R | Superior temporal gyrus | |
| −46 | 14 | 38 | 198 | 5.84 | L | Middle frontal gyrus | |
| −12 | 58 | −16 | 322 | 5.31 | L | Superior frontal gyrus, orbital part | |
| Emergency braking in visual distraction driving vs. normal driving | 8 | −84 | −10 | 2205 | 8.81 | R | Lingual gyrus |
| 44 | 50 | 4 | 1144 | 8.48 | R | Middle frontal gyrus | |
| −12 | 64 | −2 | 546 | 7.89 | L | Middle frontal gyrus, orbital part | |
| −8 | −80 | −6 | 2353 | 7.46 | L | Lingual gyrus | |
| 56 | −4 | −6 | 353 | 5.33 | R | Superior temporal gyrus | |
| −40 | 40 | −6 | 421 | 5.30 | L | Inferior frontal gyrus, orbital part | |
| 8 | −20 | 72 | 107 | 4.03 | R | Supplementary motor area | |
| Emergency braking in auditory distraction driving vs. normal driving | −40 | 40 | −8 | 682 | 8.20 | L | Inferior frontal gyrus, orbital part |
| 52 | −36 | −16 | 2411 | 8.08 | R | Inferior temporal gyrus | |
| −24 | −86 | −16 | 2746 | 7.52 | L | Lingual gyrus | |
| 14 | −98 | −2 | 421 | 6.86 | R | Calcarine fissure and surrounding cortex | |
| −14 | 64 | −2 | 925 | 6.63 | L | Middle frontal gyrus, orbital part | |
| 46 | 46 | 8 | 644 | 6.47 | R | Middle frontal gyrus | |
| 12 | −16 | 72 | 341 | 6.40 | R | Supplementary motor area | |
| 44 | 30 | 0 | 342 | 5.86 | R | Inferior frontal gyrus, triangular part | |
| 58 | −4 | −6 | 309 | 5.29 | R | Superior temporal gyrus | |
| −10 | −24 | 74 | 228 | 5.24 | L | Paracentral lobule | |
| 42 | −14 | 36 | 306 | 4.85 | R | Postcentral gyrus | |
| −10 | −84 | 40 | 120 | 4.29 | L | Cuneus | |
| −62 | −10 | 26 | 175 | 4.24 | L | Postcentral gyrus | |
| Emergency braking in cognitive distraction driving vs. normal driving | 44 | 50 | 4 | 767 | 11.08 | R | Middle frontal gyrus |
| 52 | −38 | −18 | 1258 | 9.42 | R | Inferior temporal gyrus | |
| −44 | −80 | −10 | 420 | 8.87 | L | Inferior occipital gyrus | |
| −44 | 34 | −16 | 438 | 8.48 | L | Inferior frontal gyrus, orbital part | |
| −10 | 64 | −2 | 256 | 8.07 | L | Middle frontal gyrus, orbital part | |
| 48 | 32 | −2 | 262 | 7.77 | R | Inferior frontal gyrus, orbital part | |
| 14 | −98 | −2 | 142 | 6.90 | R | Calcarine fissure and surrounding cortex | |
| 40 | −16 | 38 | 198 | 6.33 | R | Postcentral gyrus | |
| −50 | −44 | −26 | 291 | 6.33 | L | Inferior temporal gyrus | |
| MNI-Space Coordinates | kE | T | Hemisphere | Region | |||
|---|---|---|---|---|---|---|---|
| x | y | z | |||||
| Emergency braking (visual distraction driving vs. normal driving) | 36 | 50 | −2 | 384 | 4.62 | R | Middle frontal gyrus, orbital part |
| −42 | 4 | −34 | 290 | 3.93 | L | Inferior temporal gyrus | |
| −6 | 60 | −4 | 171 | 3.85 | L | Middle frontal gyrus, orbital part | |
| Emergency braking (auditory distraction driving vs. normal driving) | −22 | 54 | 4 | 52 | 3.54 | L | Superior frontal gyrus, dorsolateral |
| Emergency braking (cognitive distraction driving vs. normal driving) | 40 | 52 | −8 | 558 | 5.91 | R | Middle frontal gyrus, orbital part |
| −6 | 62 | 6 | 89 | 3.70 | L | Superior frontal gyrus, medial | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Yan, L.; Zhang, J.; Cheng, Y.; Peng, F.; Yan, F. Emergency Braking Evoked Brain Activities during Distracted Driving. Sensors 2022, 22, 9564. https://doi.org/10.3390/s22239564
Shi C, Yan L, Zhang J, Cheng Y, Peng F, Yan F. Emergency Braking Evoked Brain Activities during Distracted Driving. Sensors. 2022; 22(23):9564. https://doi.org/10.3390/s22239564
Chicago/Turabian StyleShi, Changcheng, Lirong Yan, Jiawen Zhang, Yu Cheng, Fumin Peng, and Fuwu Yan. 2022. "Emergency Braking Evoked Brain Activities during Distracted Driving" Sensors 22, no. 23: 9564. https://doi.org/10.3390/s22239564