

Spectral Reflectance Reconstruction of Organ Tissue Based on Metameric Black and Lattice Regression

Abstract
:1. Introduction
2. Methods
2.1. Spectral Imaging Model
2.2. Matrix R Theory
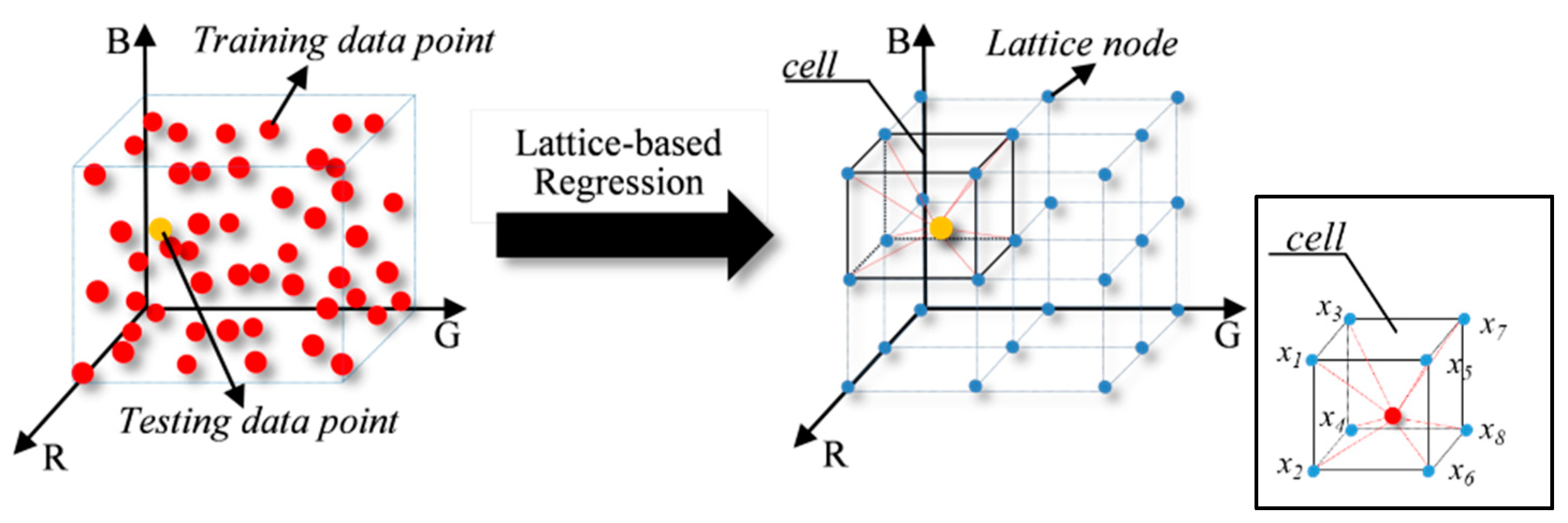
2.3. Lattice-Based Regression
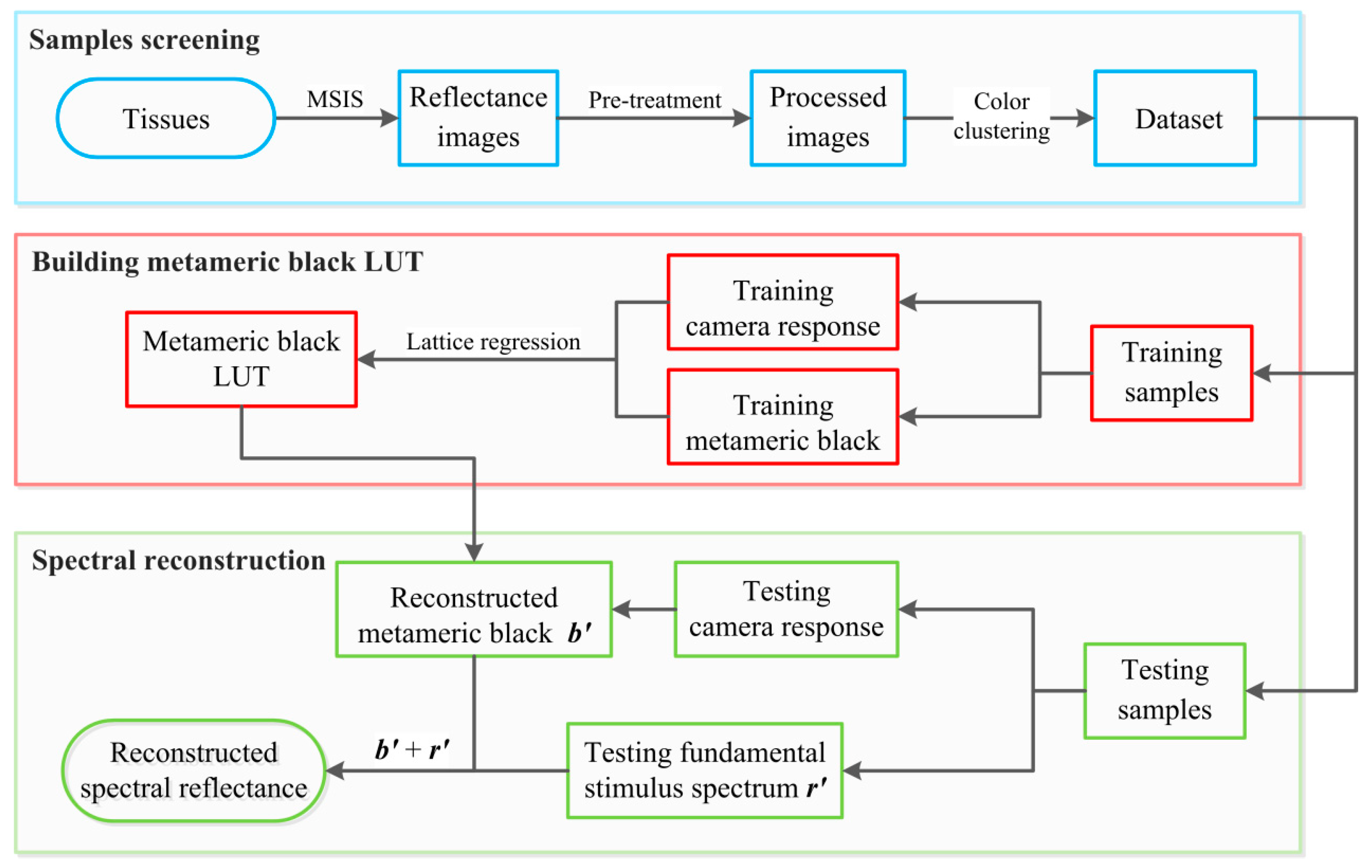
2.4. Workflow
3. Experiments
3.1. Acquisition of Samples
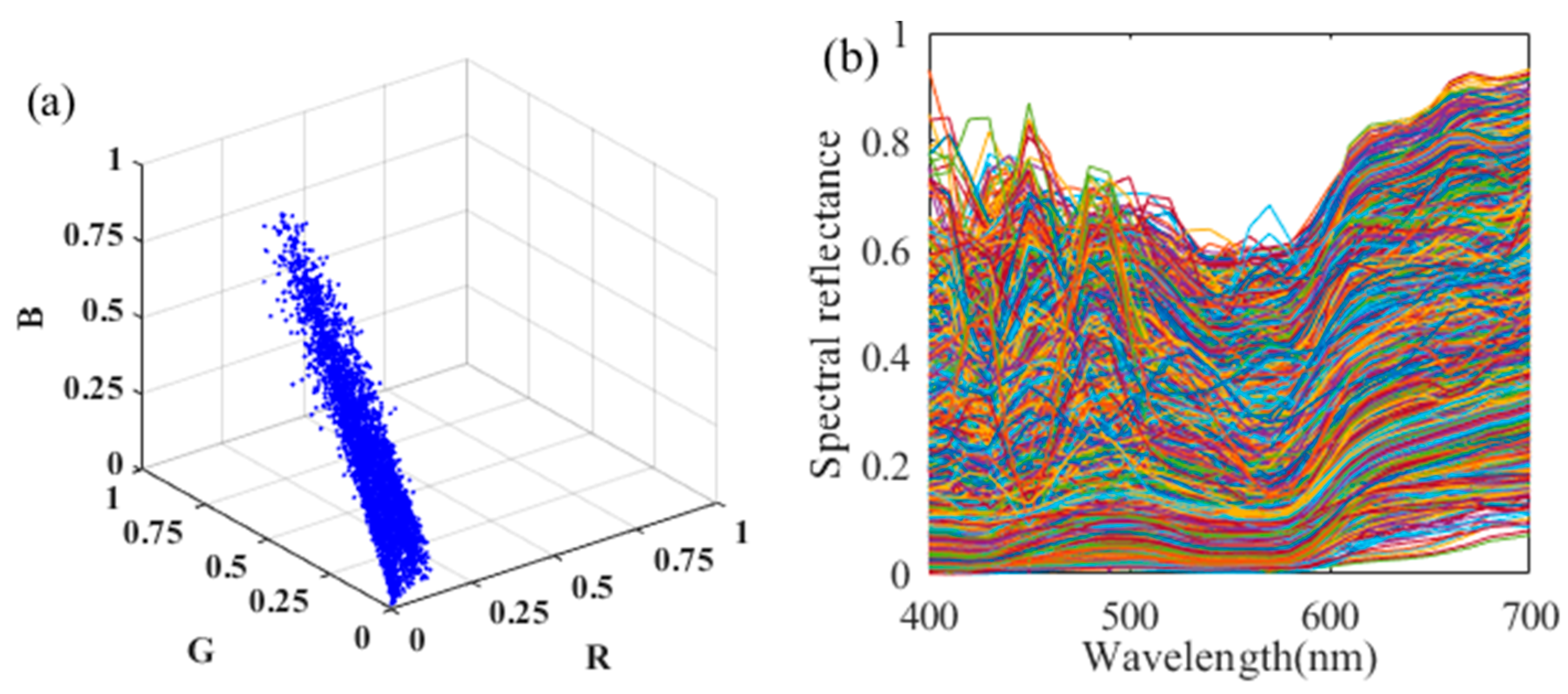
3.2. Samples Screening
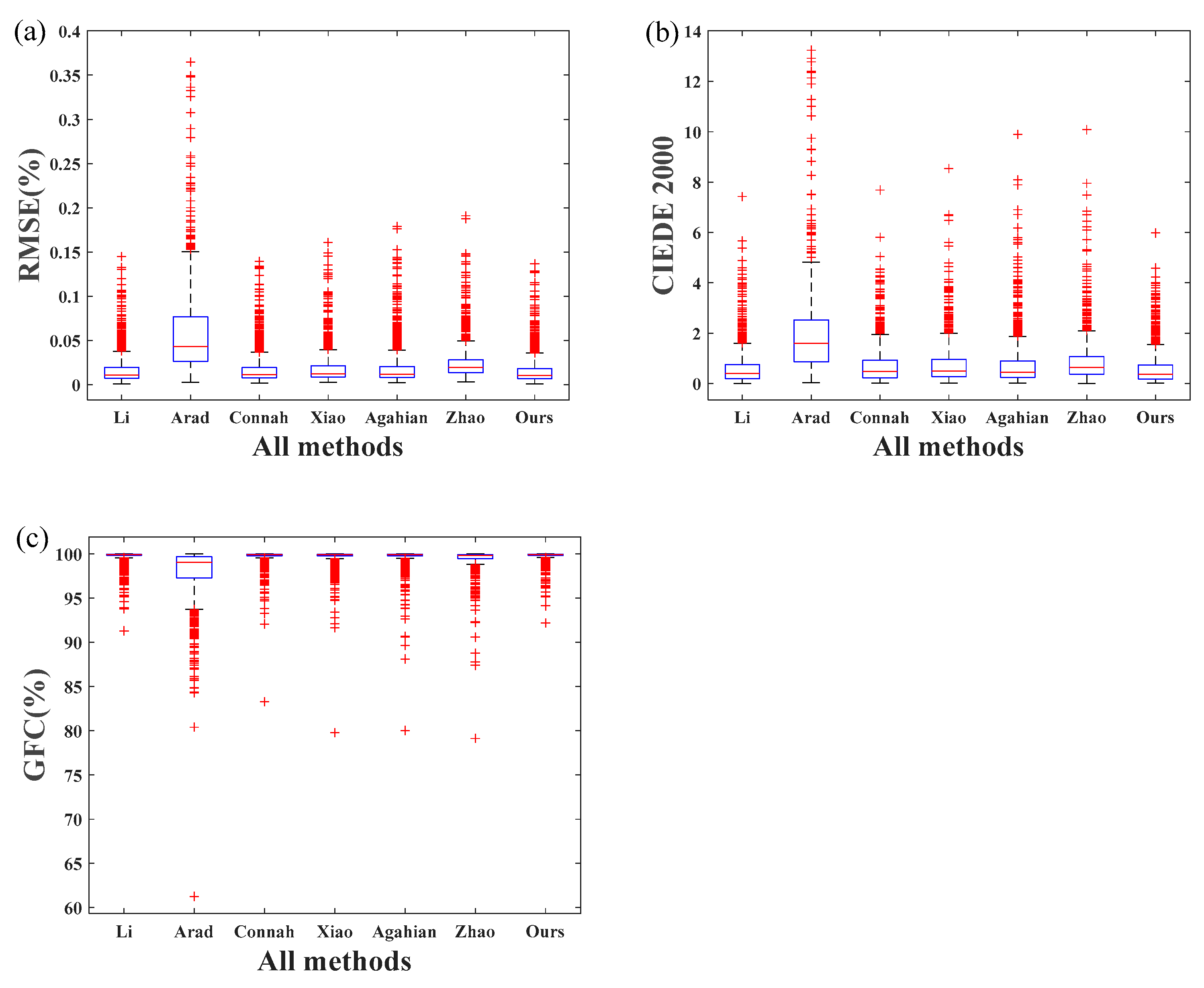
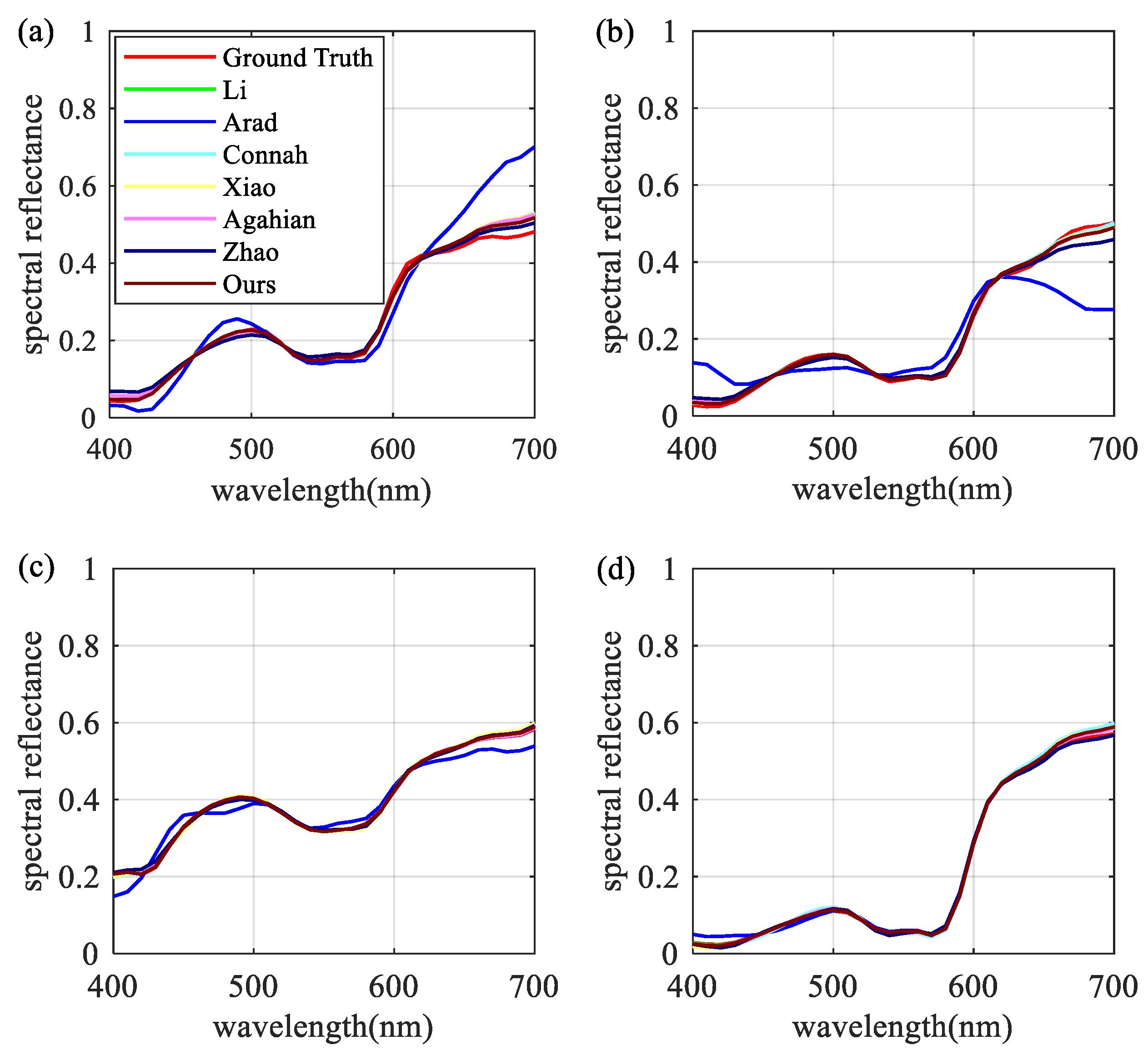
3.3. Results
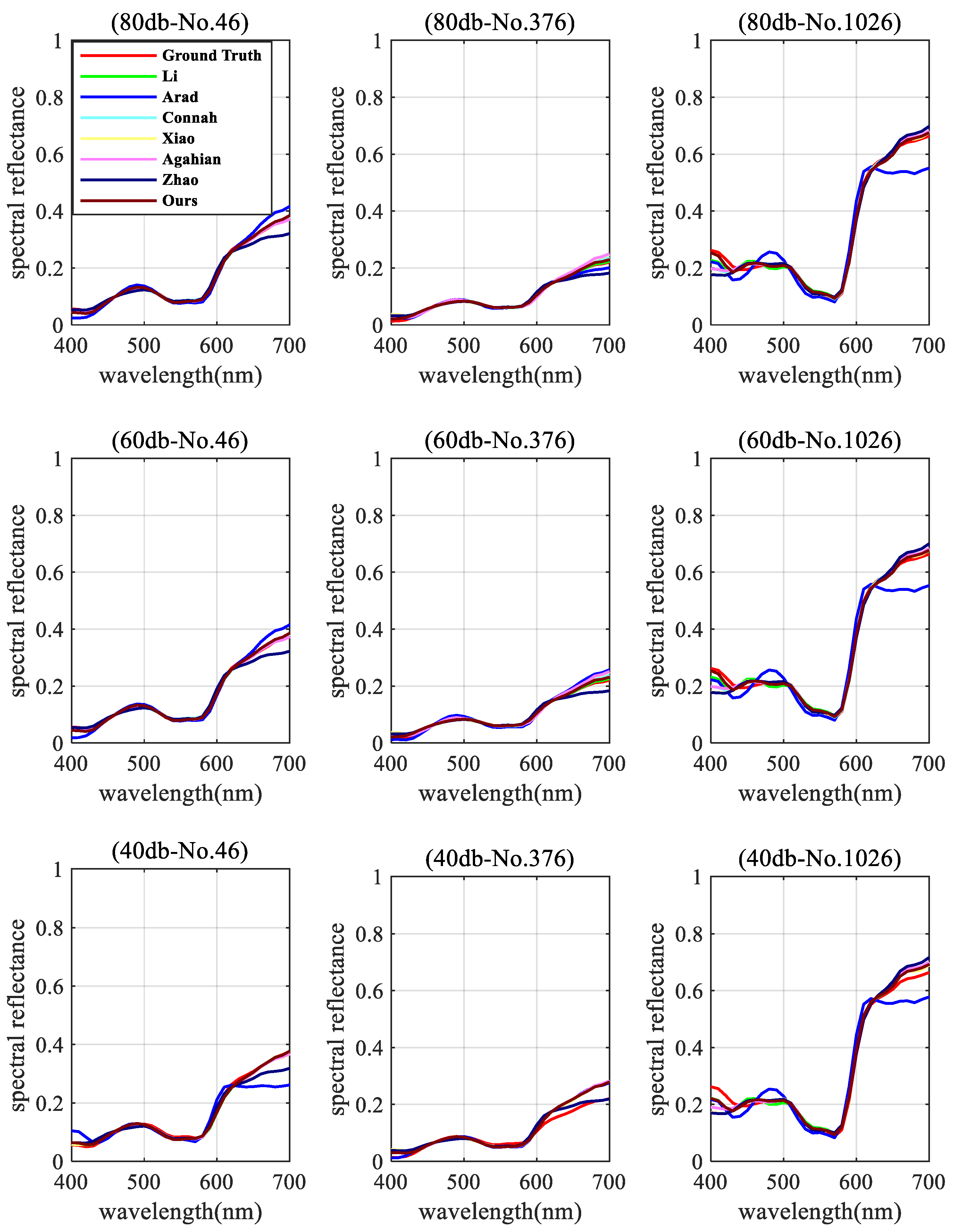
3.4. Results after Adding Noise
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Su, R.; Fu, Q.; Ren, W.; Heide, F.; Nie, Y. A survey on computational spectral reconstruction methods from RGB to hyperspectral imaging. Sci. Rep. 2022, 12, 25. [Google Scholar] [CrossRef]
- Abed, F.M.; Amirshahi, S.H.; Abed, M.R.M. Reconstruction of reflectance data using an interpolation technique. J. Opt. Soc. Am. A 2009, 26, 613–624. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Wan, X.; Xiao, G.; Liang, J. Sequential adaptive estimation for spectral reflectance based on camera responses. Opt. Express 2020, 28, 25830–25842. [Google Scholar] [CrossRef] [PubMed]
- Agahian, F.; Amirshahi, S.A. Reconstruction of reflectance spectra using weighted principal component analysis. Color Res. Appl. 2008, 33, 360–371. [Google Scholar] [CrossRef]
- Xiao, K.; Zhu, Y.; Li, C.; Connah, D.; Yates, J.M.; Wuerger, S. Wuerger. Improved method for skin reflectance reconstruction from camera images. Opt. Express 2016, 24, 14934–14950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amiri, M.M.; Amirshahi, S.H. A hybrid of weighted regression and linear models for extraction of reflectance spectra from ciexyz tristimulus values. Opt. Rev. 2014, 21, 816–825. [Google Scholar] [CrossRef]
- Heikkinen, V.; Mirhashemi, A.; Alho, J. Link functions and matérn kernel in the estimation of reflectance spectra from rgb responses. J. Opt. Soc. Am. A 2013, 30, 2444–2454. [Google Scholar] [CrossRef] [Green Version]
- Heikkinen, V.; Jetsu, T.; Parkkinen, J.; Hauta-Kasari, M.; Jaaskelainen, T.; Lee, S.D. Regularized learning framework in estimation of reflectance spectra from camera responses. J. Opt. Soc. Am. A 2007, 24, 2673–2683. [Google Scholar] [CrossRef]
- Shen, H.; Wan, H.; Zhang, Z. Estimating reflectance from multispectral camera responses based on partial least-squares regression. J. Electron. Imaging 2010, 19, 020501. [Google Scholar] [CrossRef]
- Zhang, W.-F.; Tang, G.; Dai, D.-Q.; Nehorai, A. Nehorai. Estimation of reflectance from camera responses by the regularized local linear model. Opt. Express 2011, 36, 3933–3935. [Google Scholar]
- Li, H.; Wu, Z.; Zhang, L.; Parkkinen, J. SR-LLA: A novel spectral reconstruction method based on locally linear approximation. In Proceedings of the 2013 IEEE International Conference on Image Processing, Melbourne, VIC, Australia, 15–18 September 2013; pp. 2029–2033. [Google Scholar]
- Liang, J.; Wan, X. Optimized method for spectral reflectance reconstruction from camera responses. Opt. Express 2017, 25, 28273–28287. [Google Scholar] [CrossRef]
- Liang, J.; Xiao, K.; Pointer, M.R.; Wan, X.; Li, C. Spectra estimation from raw camera responses based on adaptive local-weighted linear regression. Opt. Express 2019, 27, 5165–5180. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, G.; Wan, X.; Wang, L.; Liu, S. Reflectance spectra reconstruction from trichromatic camera based on kernel partial least square method. Opt. Express 2019, 27, 34921–34936. [Google Scholar] [CrossRef] [PubMed]
- Arad, B.; Ben-Shahar, O. Sparse Recovery of Hyperspectral Signal from Natural RGB Images. In European Conference on Computer Vision (ECCV); Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 19–34. [Google Scholar]
- Aeschbacher, J.; Wu, J.; Timofte, R. In Defense of Shallow Learned Spectral Reconstruction from RGB Images. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 471–479. [Google Scholar]
- Lin, Y.T.; Finlayson, G.D. Investigating the Upper-Bound Performance of Sparse-Coding-Based Spectral Reconstruction from RGB Images. In Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2021; pp. 19–24. [Google Scholar]
- Wyszecki, G. Valenzmetrische Untersuchung des Zusammenhanges zwischen normaler und anomaler Trichromasie (Psychophysical investigation of relationship between normal and abnormal trichromatic vision). Farbe 1953, 2, 39–52. [Google Scholar]
- Wyszecki, G. Evaluation of metameric colors. J. Opt. Soc. Am. 1958, 48, 451–454. [Google Scholar] [CrossRef]
- Cohen, J.B.; Kappauf, W.E. Metameric Color Stimuli, Fundamental Metamers, and Wyszecki’s Metameric Blacks. Am. J. Psychol. 1982, 95, 537–564. [Google Scholar] [CrossRef]
- Lin, Y.-T.; Finlayson, G.D. Physically Plausible Spectral Reconstruction from RGB Images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 2257–2266. [Google Scholar]
- Shen, H.L.; Cai, P.Q.; Shao, S.J.; Xin, J.H. Reflectance reconstruction for multispectral imaging by adaptive Wiener estimation. Opt. Express 2007, 15, 15545–15554. [Google Scholar] [CrossRef] [Green Version]
- Wyszecki, G.; Stiles, W.S. Color science: Concepts and methods. In Quantitative Data and Formulae, 2nd ed.; Wiley & Sons, Inc.: Hoboken, NJ, USA, 2000; pp. 117–243. [Google Scholar]
- Foster, D.H.; Amano, K.; Nascimento, S.M.C.; Foster, M.J. Frequency of metamerism in natural scenes. J. Opt. Soc. Am. A 2006, 23, 2359–2372. [Google Scholar] [CrossRef]
- Roweis, S.T.; Saul, L.K. Nonlinear dimension reduction by locally linear embedding. Science 2000, 290, 2323–2326. [Google Scholar] [CrossRef] [Green Version]
- Seung, H.S.; Lee, D.D. The manifold ways of perception. Science 2000, 290, 2268–2269. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, D.; Gu, J.; Susstrunk, S. What is the space of spectral sensitivity functions for digital color cameras? In Proceedings of the 2013 IEEE Workshop on Applications of Computer Vision (WACV), Clearwater Beach, FL, USA, 15–17 January 2013; pp. 168–179. [Google Scholar]
- Luo, M.R.; Cui, G.; Rigg, B. The development of the CIE 2000 colour-difference formula: CIEDE2000. Color Res. Appl. 2001, 26, 340–350. [Google Scholar] [CrossRef]
- Connah, D.; Hardeberg, J.Y. Spectral recovery using polynomial models. Proc. SPIE 2005, 5667, 65–75. [Google Scholar]
- Zhao, Y.; Berns, R.S. Image-based spectral reflectance reconstruction using the matrix R method. Color Res. Appl. 2007, 32, 343–351. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | RMSE (%) | CIEDE2000 | GFC (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | Mean | Max | Min | Mean | Max | Min | Mean | Max | |
| Arad | 0.31 | 6.41 | 45.83 | 0.07 | 2.02 | 9.73 | 77.35 | 97.11 | 99.97 |
| Connah | 0.16 | 1.70 | 13.93 | 0.01 | 0.71 | 6.65 | 83.29 | 99.75 | 100.00 |
| Xiao | 0.27 | 1.83 | 16.08 | 0.03 | 0.77 | 7.94 | 79.79 | 99.72 | 100.00 |
| Li | 0.08 | 1.64 | 14.47 | 0.01 | 0.61 | 5.88 | 91.31 | 99.77 | 100.00 |
| Agahian | 0.23 | 1.82 | 17.91 | 0.01 | 0.73 | 9.26 | 80.04 | 99.70 | 100.00 |
| Zhao | 0.31 | 2.43 | 19.08 | 0.01 | 0.87 | 8.55 | 79.14 | 99.52 | 99.99 |
| Ours | 0.08 | 1.59 | 13.69 | 0.01 | 0.59 | 4.78 | 92.18 | 99.79 | 100.00 |
| RMSE(%) | ||||||||
|---|---|---|---|---|---|---|---|---|
| SNR | Results | Arad | Connah | Xiao | Li | Agahian | Zhao | Ours |
| 80 | min | 0.28 | 0.16 | 0.27 | 0.08 | 0.23 | 0.31 | 0.08 |
| mean | 5.65 | 1.70 | 1.83 | 1.64 | 1.82 | 2.43 | 1.59 | |
| max | 36.47 | 13.93 | 16.08 | 14.47 | 17.91 | 19.09 | 13.69 | |
| 60 | min | 0.28 | 0.16 | 0.28 | 0.11 | 0.23 | 0.28 | 0.10 |
| mean | 5.65 | 1.70 | 1.83 | 1.64 | 1.83 | 2.43 | 1.59 | |
| max | 36.49 | 13.94 | 16.00 | 14.47 | 17.85 | 19.04 | 13.66 | |
| 40 | min | 0.28 | 0.28 | 0.39 | 0.23 | 0.33 | 0.37 | 0.27 |
| mean | 5.76 | 1.87 | 1.98 | 1.82 | 1.99 | 2.54 | 1.79 | |
| max | 35.97 | 14.13 | 16.28 | 14.96 | 17.94 | 18.72 | 13.42 | |
| CIEDE2000 | ||||||||
| SNR | Results | Arad | Connah | Xiao | Li | Agahian | Zhao | Ours |
| 80 | min | 0.03 | 0.01 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 |
| mean | 1.92 | 0.71 | 0.77 | 0.61 | 0.73 | 0.87 | 0.59 | |
| max | 17.54 | 6.67 | 7.94 | 5.90 | 9.26 | 8.55 | 4.79 | |
| 60 | min | 0.04 | 0.01 | 0.04 | 0.01 | 0.03 | 0.04 | 0.01 |
| mean | 1.93 | 0.73 | 0.78 | 0.64 | 0.76 | 0.89 | 0.62 | |
| max | 17.55 | 9.24 | 7.97 | 5.84 | 9.19 | 8.48 | 4.80 | |
| 40 | min | 0.15 | 0.07 | 0.04 | 0.05 | 0.07 | 0.10 | 0.08 |
| mean | 2.35 | 1.44 | 1.49 | 1.33 | 1.55 | 1.56 | 1.45 | |
| max | 16.60 | 9.36 | 11.41 | 6.22 | 11.42 | 9.43 | 9.30 | |
| GFC(%) | ||||||||
| SNR | Results | Arad | Connah | Xiao | Li | Agahian | Zhao | Ours |
| 80 | min | 61.26 | 83.28 | 79.78 | 91.30 | 80.03 | 79.14 | 92.19 |
| mean | 98.01 | 99.75 | 99.72 | 99.77 | 99.70 | 99.52 | 99.79 | |
| max | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 99.99 | 100.00 | |
| 60 | min | 61.25 | 83.29 | 79.79 | 91.36 | 80.04 | 79.15 | 92.27 |
| mean | 98.01 | 99.75 | 99.72 | 99.77 | 99.70 | 99.52 | 99.79 | |
| max | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 99.99 | 100.00 | |
| 40 | min | 61.19 | 78.95 | 78.95 | 89.57 | 79.45 | 78.56 | 88.15 |
| mean | 97.94 | 99.71 | 99.71 | 99.75 | 99.68 | 99.50 | 99.76 | |
| max | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 99.99 | 100.00 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhang, S.; Xu, L. Spectral Reflectance Reconstruction of Organ Tissue Based on Metameric Black and Lattice Regression. Sensors 2022, 22, 9405. https://doi.org/10.3390/s22239405
Chen Y, Zhang S, Xu L. Spectral Reflectance Reconstruction of Organ Tissue Based on Metameric Black and Lattice Regression. Sensors. 2022; 22(23):9405. https://doi.org/10.3390/s22239405
Chicago/Turabian StyleChen, Yang, Siyuan Zhang, and Lihao Xu. 2022. "Spectral Reflectance Reconstruction of Organ Tissue Based on Metameric Black and Lattice Regression" Sensors 22, no. 23: 9405. https://doi.org/10.3390/s22239405