
A Single Image Deep Learning Approach to Restoration of Corrupted Landsat-7 Satellite Images


Abstract
:1. Introduction
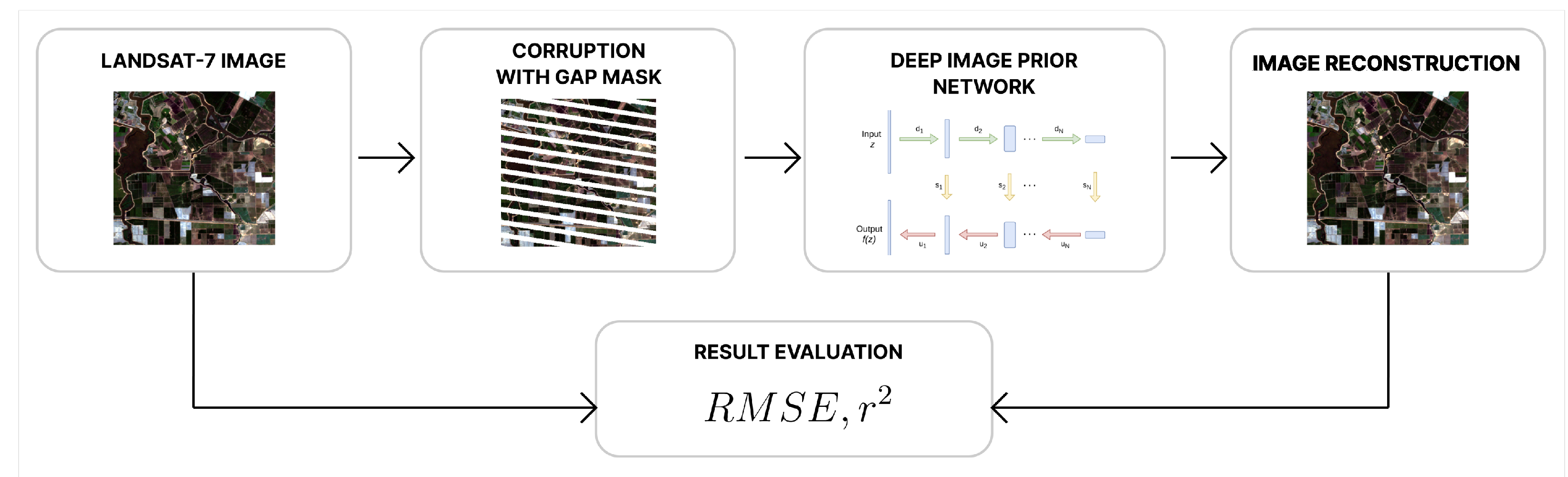
- We propose an application of the DIP method for the reconstruction task of corrupted Landsat-7 images;
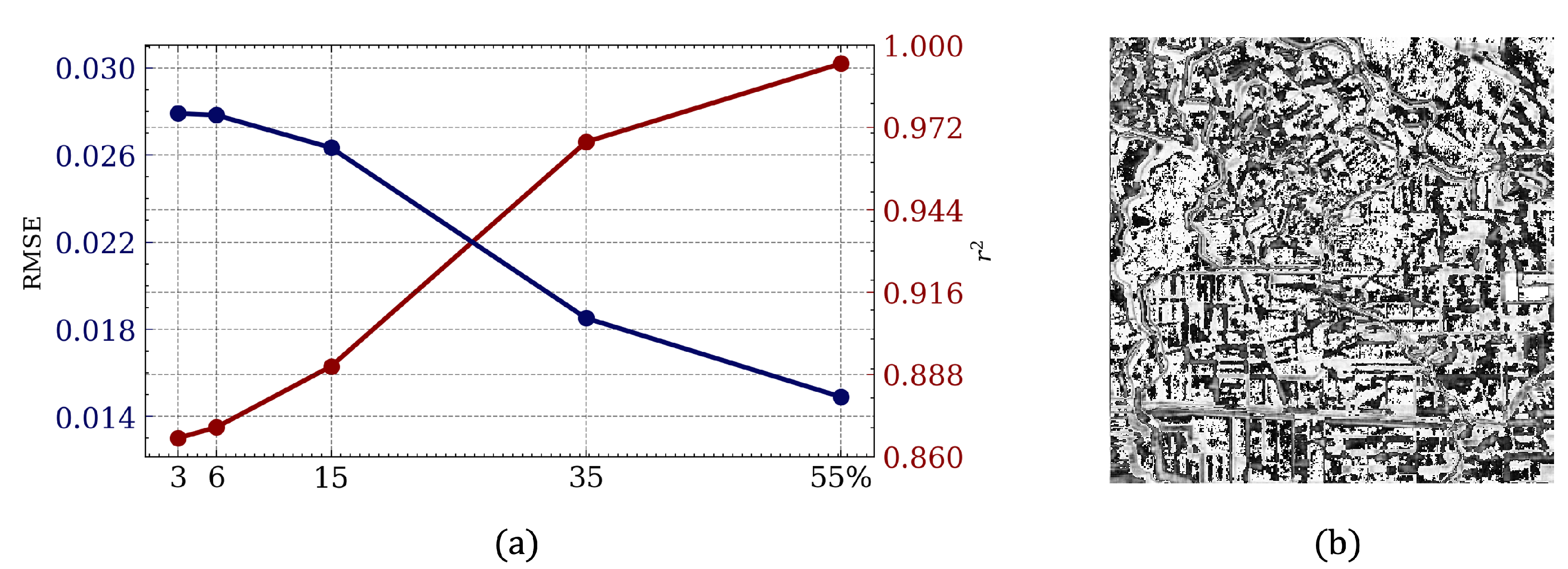
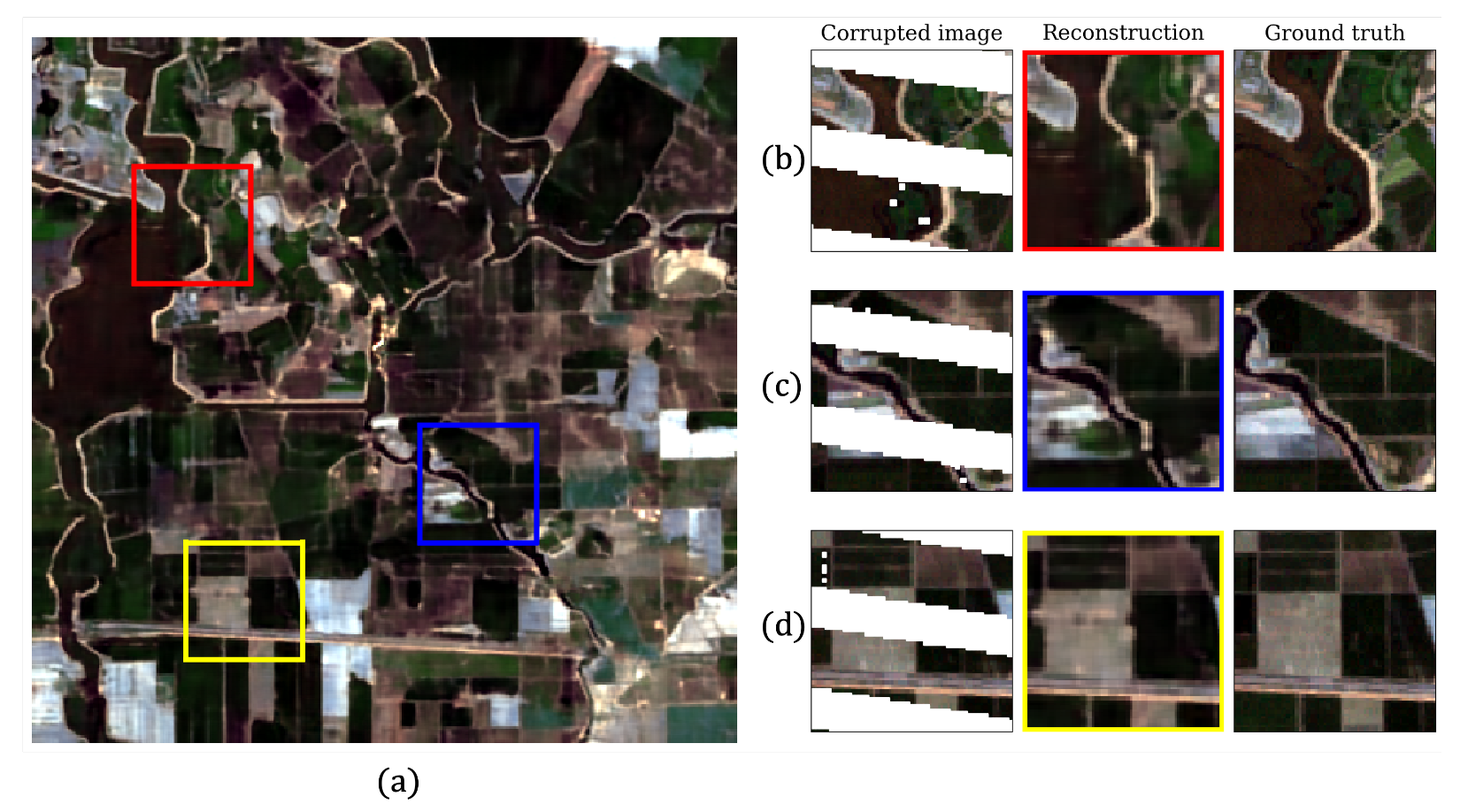
- We demonstrate the ability of DIP to reconstruct remote sensing scenes with different levels of corruption in them;
- We compare the performance of our approach with the performance of classical single-image gap-filling methods.
2. Materials and Methods
2.1. Deep Image Prior
2.2. Classical Single-Image Gap-Filling Methods
2.3. Study Area and Dataset
2.4. Accuracy Evaluation
2.5. Experimental Setting
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DIP | Deep image prior |
| RMSE | Root mean squared error |
| DS | Direct sampling |
| WLR | Weighted linear regression |
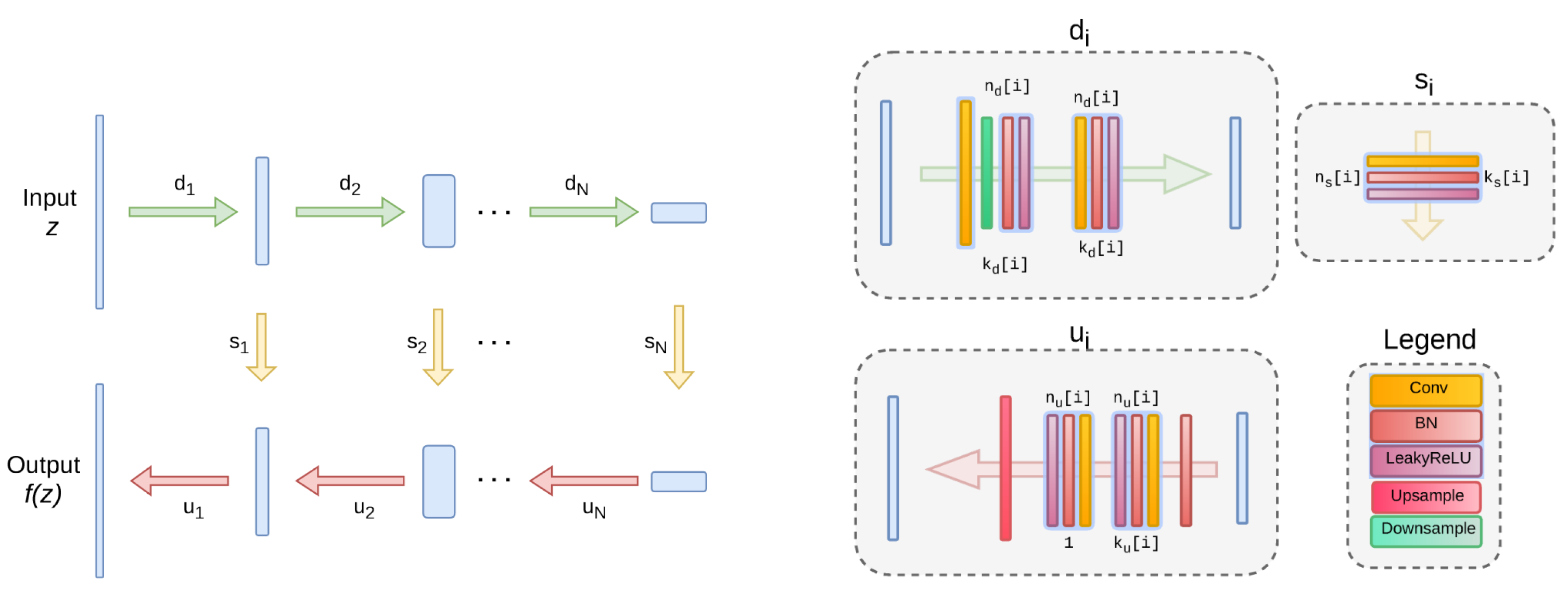
Appendix A. Architecture Details
| [128, 128, 128, 128, 128] |
| [3, 3, 3, 3, 3] |
| [128, 128, 128, 128, 128] |
| [1, 1, 1, 1, 1] |
| num_iter = 1500 |
| LR = 0.01 |
| upsampling = nearest |

References
- Arikan, M. Parcel based crop mapping through multi-temporal masking classification of Landsat 7 images in Karacabey, Turkey. In Proceedings of the ISPRS Symposium, Istanbul International Archives of Photogrammetry, Remote Sensing and Spatial Information Science, Istanbul, Turkey, 12–23 July 2004; Volume 34. [Google Scholar]
- Akbari, M.; Mamanpoush, A.R.; Gieske, A.; Miranzadeh, M.; Torabi, M.; Salemi, H. Crop and land cover classification in Iran using Landsat 7 imagery. Int. J. Remote Sens. 2006, 27, 4117–4135. [Google Scholar] [CrossRef]
- Li, P.; Jiang, L.; Feng, Z. Cross-comparison of vegetation indices derived from Landsat-7 enhanced thematic mapper plus (ETM+) and Landsat-8 operational land imager (OLI) sensors. Remote Sens. 2013, 6, 310–329. [Google Scholar] [CrossRef] [Green Version]
- Ahmadian, N.; Ghasemi, S.; Wigneron, J.P.; Zölitz, R. Comprehensive study of the biophysical parameters of agricultural crops based on assessing Landsat 8 OLI and Landsat 7 ETM+ vegetation indices. GISci. Remote Sens. 2016, 53, 337–359. [Google Scholar] [CrossRef]
- Bansal, C.; Ahlawat, H.O.; Jain, M.; Prakash, O.; Mehta, S.A.; Singh, D.; Baheti, H.; Singh, S.; Seth, A. IndiaSat: A Pixel-Level Dataset for Land-Cover Classification on Three Satellite Systems-Landsat-7, Landsat-8, and Sentinel-2. In Proceedings of the ACM SIGCAS Conference on Computing and Sustainable Societies, Virtual, 28 June–2 July 2021; pp. 147–155. [Google Scholar]
- Li, T.; Johansen, K.; McCabe, M.F. A machine learning approach for identifying and delineating agricultural fields and their multi-temporal dynamics using three decades of Landsat data. ISPRS J. Photogramm. Remote Sens. 2022, 186, 83–101. [Google Scholar] [CrossRef]
- USGS. Landsat 7 Scan Line Corrector (SLC) Failure. Available online: https://www.usgs.gov/land-resources/nli/landsat/landsat-7 (accessed on 26 November 2019).
- Chiles, J.P.; Delfiner, P. Geostatistics: Modeling Spatial Uncertainty; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 497. [Google Scholar]
- Pringle, M.; Schmidt, M.; Muir, J. Geostatistical interpolation of SLC-off Landsat ETM+ images. ISPRS J. Photogramm. Remote Sens. 2009, 64, 654–664. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Travis, D. Gaps-fill of SLC-off Landsat ETM+ satellite image using a geostatistical approach. Int. J. Remote Sens. 2007, 28, 5103–5122. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, X.; Vogelmann, J.E.; Gao, F.; Jin, S. A simple and effective method for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2011, 115, 1053–1064. [Google Scholar] [CrossRef]
- Sadiq, A.; Sulong, G.; Edwar, L. Recovering defective Landsat 7 Enhanced Thematic Mapper Plus images via multiple linear regression model. IET Comput. Vis. 2016, 10, 788–797. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, D.; Chen, J. A new geostatistical approach for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2012, 124, 49–60. [Google Scholar] [CrossRef]
- Zeng, C.; Shen, H.; Zhang, L. Recovering missing pixels for Landsat ETM+ SLC-off imagery using multi-temporal regression analysis and a regularization method. Remote. Sens. Environ. 2013, 131, 182–194. [Google Scholar] [CrossRef]
- Mariethoz, G.; Renard, P.; Straubhaar, J. The direct sampling method to perform multiple-point geostatistical simulations. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef] [Green Version]
- Scaramuzza, P.; Micijevic, E.; Chander, G. SLC Gap-Filled Products Phase One Methodology. Available online: https://corpora.tika.apache.org/base/docs/govdocs1/257/257855.pdf (accessed on 22 November 2022).
- Yin, G.; Mariethoz, G.; Sun, Y.; McCabe, M.F. A comparison of gap-filling approaches for Landsat-7 satellite data. Int. J. Remote Sens. 2017, 38, 6653–6679. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, D.; Ye, J.; Li, X.; He, X. Fast and accurate matrix completion via truncated nuclear norm regularization. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 2117–2130. [Google Scholar] [CrossRef] [PubMed]
- Miao, J.; Zhou, X.; Huang, T.Z.; Zhang, T.; Zhou, Z. A novel inpainting algorithm for recovering Landsat-7 ETM+ SLC-OFF images based on the low-rank approximate regularization method of dictionary learning with nonlocal and nonconvex models. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6741–6754. [Google Scholar] [CrossRef]
- El Fellah, S.; Rziza, M.; El Haziti, M. An efficient approach for filling gaps in Landsat 7 satellite images. IEEE Geosci. Remote Sens. Lett. 2016, 14, 62–66. [Google Scholar] [CrossRef]
- Deshpande, A.M.; Patale, S.R.; Roy, S. Removal of line striping and shot noise from remote sensing imagery using a deep neural network with post-processing for improved restoration quality. Int. J. Remote Sens. 2021, 42, 7357–7380. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Zeng, C.; Li, X.; Wei, Y. Missing data reconstruction in remote sensing image with a unified spatial–temporal–spectral deep convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4274–4288. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, S.; Chandra, M.G.; Balamurali, P. Deep Dictionary Learning for Inpainting. In Proceedings of the Computer Vision, Pattern Recognition, Image Processing, and Graphics: 7th National Conference, NCVPRIPG 2019, Hubballi, India, 22–24 December 2019; Revised Selected Papers. Springer Nature: Berlin/Heidelberg, Germany, 2020; Volume 1249, p. 79. [Google Scholar]
- Pondaven, A.; Bakler, M.; Guo, D.; Hashim, H.; Ignatov, M.; Zhu, H. Convolutional Neural Processes for Inpainting Satellite Images. arXiv 2022, arXiv:2205.12407. [Google Scholar]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Deep Image Prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9446–9454. [Google Scholar]
- Rasti, B.; Koirala, B.; Scheunders, P.; Ghamisi, P. UnDIP: Hyperspectral unmixing using deep image prior. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Bandara, W.G.C.; Valanarasu, J.M.J.; Patel, V.M. Hyperspectral pansharpening based on improved deep image prior and residual reconstruction. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–16. [Google Scholar] [CrossRef]
- Sidorov, O.; Yngve Hardeberg, J. Deep hyperspectral prior: Single-image denoising, inpainting, super-resolution. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27–28 October 2019. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Carpenter, R. Principles and procedures of statistics, with special reference to the biological sciences. Eugen. Rev. 1960, 52, 172. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Delving deep into rectifiers: Surpassing human-level performance on imagenet classification. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1026–1034. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | r2 | |||||||
|---|---|---|---|---|---|---|---|---|
| Method | Band 1 | Band 2 | Band 3 | Band 4 | Band 1 | Band 2 | Band 3 | Band 4 |
| Kriging | 0.010 | 0.015 | 0.023 | 0.063 | 0.610 | 0.627 | 0.728 | 0.690 |
| WLR | 0.010 | 0.014 | 0.023 | 0.055 | 0.622 | 0.694 | 0.742 | 0.765 |
| DS | 0.009 | 0.012 | 0.020 | 0.052 | 0.685 | 0.755 | 0.792 | 0.780 |
| DIP (ours) | 0.020 | 0.024 | 0.043 | 0.052 | 0.812 | 0.853 | 0.874 | 0.832 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrovskaia, A.; Jana, R.; Oseledets, I. A Single Image Deep Learning Approach to Restoration of Corrupted Landsat-7 Satellite Images. Sensors 2022, 22, 9273. https://doi.org/10.3390/s22239273
Petrovskaia A, Jana R, Oseledets I. A Single Image Deep Learning Approach to Restoration of Corrupted Landsat-7 Satellite Images. Sensors. 2022; 22(23):9273. https://doi.org/10.3390/s22239273
Chicago/Turabian StylePetrovskaia, Anna, Raghavendra Jana, and Ivan Oseledets. 2022. "A Single Image Deep Learning Approach to Restoration of Corrupted Landsat-7 Satellite Images" Sensors 22, no. 23: 9273. https://doi.org/10.3390/s22239273