

Understanding Autonomous Shuttle Adoption Intention: Predictive Power of Pre-Trial Perceptions and Attitudes




Abstract
:1. Introduction
2. Theoretical Background
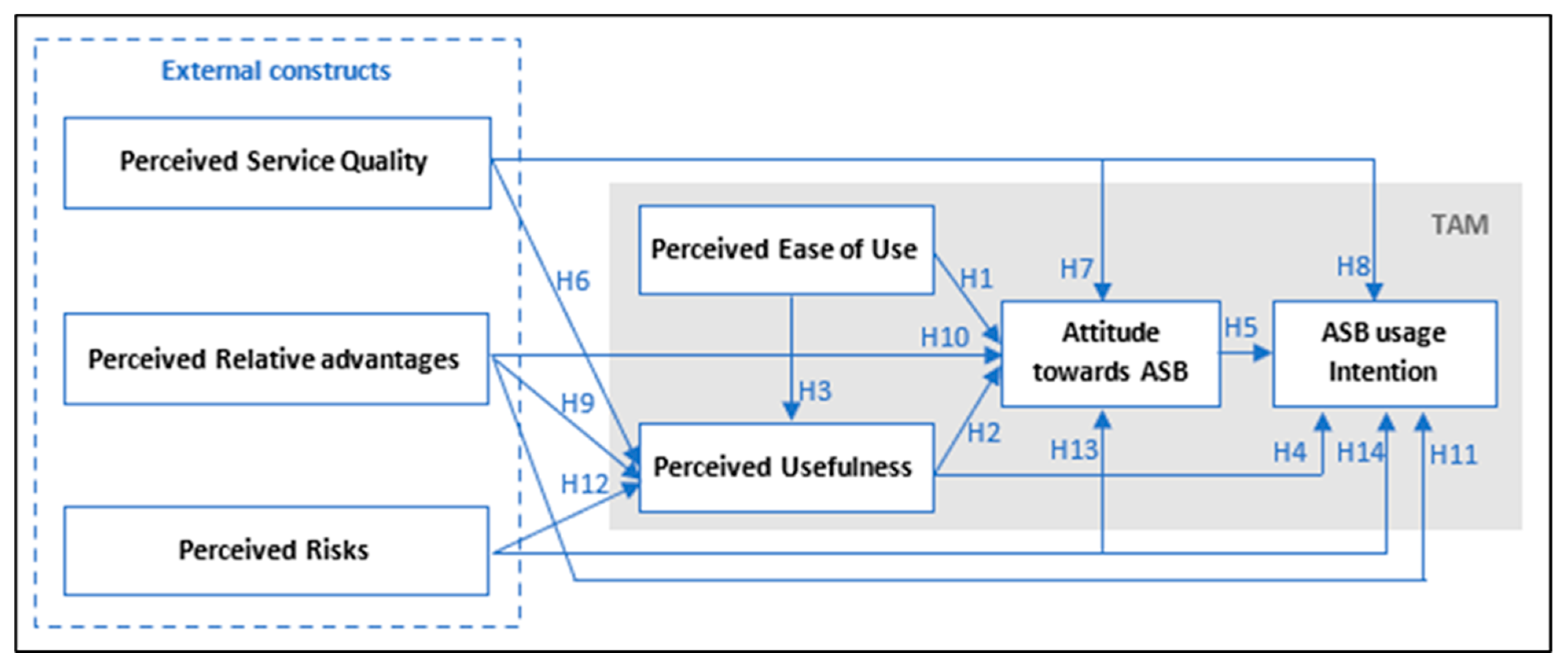
3. Research Model Hypothesis Development
3.1. Technology Acceptance Model
3.2. Perceived Service Quality
3.3. Perceived Relative Advantages
3.4. Perceived Risks
4. Research Methodology
4.1. Survey Design
4.2. Case Study Region
4.3. Data Collection Procedure
4.4. Survey Participants
5. Data Analysis and Results
5.1. Measurement Model Evaluation
5.2. Structural Model Evaluation
5.3. Hypothesis Testing
6. Discussion of Findings and Implications for Policy and Practice
6.1. Technology Acceptance Model
6.2. Perceived Relative Advantage
6.3. Perceived Risks
6.4. Perceived Service Quality
7. Conclusions and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yigitcanlar, T.; Corchado, J.M.; Mehmood, R.; Li, R.Y.M.; Mossberger, K.; Desouza, K. Responsible Urban Innovation with Local Government Artificial Intelligence (AI): A Conceptual Framework and Research Agenda. J. Open Innov. Technol. Mark. Complex. 2021, 7, 71. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Wilson, M.; Kamruzzaman, M. Disruptive impacts of automated driving systems on the built environment and land use: An urban planner’s perspective. J. Open Innov. Technol. Mark. Complex. 2019, 5, 24. [Google Scholar] [CrossRef] [Green Version]
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2021, 15, 731–748. [Google Scholar] [CrossRef]
- Simpson, J.R.; Mishra, S. Developing a methodology to predict the adoption rate of Connected Autonomous Trucks in transportation organizations using peer effects. Res. Transp. Econ. 2020, 90, 100866. [Google Scholar] [CrossRef]
- Talebian, A.; Mishra, S. Unfolding the state of the adoption of connected autonomous trucks by the commercial fleet owner industry. Transp. Res. Part E: Logist. Transp. Rev. 2022, 158, 102616. [Google Scholar] [CrossRef]
- Lakhekar, G.V.; Waghmare, L.M. Robust self-organising fuzzy sliding mode-based path-following control for autonomous underwater vehicles. J. Mar. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Peeta, S.; Paz, A.; DeLaurentis, D. Stated preference analysis of a new microjet on-demand air service. Transp. Res. Part A 2008, 42, 629–645. [Google Scholar]
- Faisal, A.; Yigitcanlar, T.; Kamruzzaman, M.; Paz, A. Mapping Two Decades of Autonomous Vehicle Research: A Systematic Scientometric Analysis. J. Urban Technol. 2020, 28, 45–74. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Kamruzzaman, M. Smart cities and mobility: Does the smartness of Australian cities lead to sustainable commuting patterns? J. Urban Technol. 2019, 26, 21–46. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Kankanamge, N.; Regona, M.; Ruiz Maldonado, A.; Rowan, B.; Ryu, A.; Li, R. Artificial intelligence technologies and related urban planning and development concepts: How are they perceived and utilized in Australia? J. Open Innov. Technol. Mark. Complex. 2020, 6, 187. [Google Scholar] [CrossRef]
- Zmud, J.; Sener, I.N.; Wagner, J. Self-Driving Vehicles: Determinants of Adoption and Conditions of Usage. Transp. Res. Rec. J. Transp. Res. Board 2016, 2565, 57–64. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Individual Predictors of Autonomous Vehicle Public Acceptance and Intention to Use: A Systematic Review of the Literature. J. Open Innov. 2020, 6, 106. [Google Scholar] [CrossRef]
- Sweet, M.N.; Laidlaw, K. No longer in the driver’s seat: How do affective motivations impact consumer interest in automated vehicles? Transportation 2019, 47, 2601–2634. [Google Scholar] [CrossRef]
- Dennis, S.; Paz, A.; Yigitcanlar, T. Perceptions and attitudes towards the deployment of autonomous and connected vehicles: Insights from Las Vegas, Nevada. J. Urban Technol. 2021, 28, 75–95. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Siiba, A.; Okyere, D.K.; Tuffour, J.P. Mobility-on-demand: An empirical study of internet-based ride-hailing adoption factors, travel characteristics and mode substitution effects. Transp. Research. Part C Emerg. Technol. 2020, 115, 102638. [Google Scholar] [CrossRef]
- Bradshaw-Martin, H.; Easton, C. Autonomous or ‘driverless’ cars and disability: A legal and ethical analysis. Eur. J. Curr. Leg. Issues 2014, 20, 72212. [Google Scholar]
- Musselwhite, C.; Holland, C.; Walker, I. The role of transport and mobility in the health of older people. J. Transp. Health 2015, 2, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles and alternatives to driving: Trust, preferences, and effects of age. In Proceedings of the Transportation Research Board 96th Annual Meeting (TRB’17), Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Koppel, S.; Lee, Y.-C.; Mirman, J.H.; Peiris, S.; Tremoulet, P. Key factors associated with Australian parents’ willingness to use an automated vehicle to transport their unaccompanied children. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 137–152. [Google Scholar] [CrossRef]
- Butler, L.; Yigitcanlar, T.; Paz, A. Factors influencing public awareness of autonomous vehicles: Empirical evidence from Brisbane. Transp. Res. Part F Traffic Psychol. Behav. 2021, 82, 256–267. [Google Scholar] [CrossRef]
- Dowler, E.; Green, J.; Bauer, M.; Gasperoni, G. Assessing public perception: Issues and methods. In Health Hazard and Public Debate: Lessons for Risk Communication from BSE/CJD Saga; World Health Organization: Geneva, Switzerland, 2006; pp. 39–60. [Google Scholar]
- Insani, P.A. Public Perception towards Public Service Quality. In: International Institute for Science, Technology and Education (IISTE). E-Journals 2013, 3, 12. [Google Scholar]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Research. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Butler, L.; Yigitcanlar, T.; Paz, A. Barriers and risks of Mobility-as-a-Service (MaaS) adoption in cities: A systematic review of the literature. Cities 2021, 109, 103036. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Chen, H.-K.; Yan, D.-W. Interrelationships between influential factors and behavioral intention with regard to autonomous vehicles. Int. J. Sustain. Transp. 2019, 13, 511–527. [Google Scholar] [CrossRef]
- Herrenkind, B.; Brendel, A.B.; Nastjuk, I.; Greve, M.; Kolbe, L.M. Investigating end-user acceptance of autonomous electric buses to accelerate diffusion. Transp. Res. Part D Transp. Environ. 2019, 74, 255–276. [Google Scholar] [CrossRef]
- Herrenkind, B.; Nastjuk, I.; Brendel, A.B.; Trang, S.; Kolbe, L.M. Young people’s travel behavior–Using the life-oriented approach to understand the acceptance of autonomous driving. Transp. Res. Part D Transp. Environ. 2019, 74, 214–233. [Google Scholar] [CrossRef]
- Roche-Cerasi, I. Public acceptance of driverless shuttles in Norway. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 162–183. [Google Scholar] [CrossRef]
- Bernhard, C.; Oberfeld, D.; Hoffmann, C.; Weismüller, D.; Hecht, H. User acceptance of automated public transport: Valence of an autonomous minibus experience. Transp. Research. Part F Traffic Psychol. Behav. 2020, 70, 109–123. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Nordhoff, S.; Madigan, R.; Van Arem, B.; Merat, N.; Happee, R. Interrelationships among predictors of automated vehicle acceptance: A structural equation modelling approach. Theor. Issues Ergon. Sci. 2021, 22, 383–408. [Google Scholar] [CrossRef]
- Nordhoff, S.; Malmsten, V.; van Arem, B.; Liu, P.; Happee, R. A structural equation modeling approach for the acceptance of driverless automated shuttles based on constructs from the Unified Theory of Acceptance and Use of Technology and the Diffusion of Innovation Theory. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 58–73. [Google Scholar] [CrossRef]
- Nordhoff, S.; Stapel, J.; van Arem, B.; Happee, R. Passenger opinions of the perceived safety and interaction with automated shuttles: A test ride study with ‘hidden’ safety steward. Transp. Res. Part A Policy Pract. 2020, 138, 508–524. [Google Scholar] [CrossRef]
- Papadima, G.; Genitsaris, E.; Karagiotas, I.; Naniopoulos, A.; Nalmpantis, D. Investigation of acceptance of driverless buses in the city of Trikala and optimization of the service using Conjoint Analysis. Util. Policy 2020, 62, 100994. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef] [Green Version]
- Davis, F.D.; Bagozzi, R.P.; Warshaw, P.R. User Acceptance of Computer Technology: A Comparison of Two Theoretical Models. Manag. Sci. 1989, 35, 982–1003. [Google Scholar] [CrossRef] [Green Version]
- Nastjuk, I.; Herrenkind, B.; Marrone, M.; Brendel, A.B.; Kolbe, L.M. What drives the acceptance of autonomous driving? An investigation of acceptance factors from an end-user’s perspective. Technol. Forecast. Soc. Chang. 2020, 161, 1. [Google Scholar] [CrossRef]
- Motamedi, S.; Wang, P.; Zhang, T.; Chan, C.-Y. Acceptance of Full Driving Automation: Personally Owned and Shared-Use Concepts. Hum. Factors J. Hum. Factors Ergon. Soc. 2019, 62, 288–309. [Google Scholar] [CrossRef]
- Dirsehan, T.; Can, C. Examination of trust and sustainability concerns in autonomous vehicle adoption. Technol. Soc. 2020, 63, 101361. [Google Scholar] [CrossRef]
- Davis, J.A.; Weber, R.P. The Logic of Causal Order; Sage: Newbury Park, CA, USA, 1985; Volume 55. [Google Scholar]
- Ajzen, I.; Fishbein, M. Understanding Attitudes and Predicting Social Behavior; Prentice Hall Inc.: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Högg, R.; Schmid, H.P.D.B.; Stanoevska-Slabeva, F.P.D.K. Erweiterung und Evaluation des Technologieakzeptanzmodells zur Anwendung bei mobilen Datendiensten; Universität St. Gallen: St. Gallen, Switzerland, 2010. [Google Scholar]
- Pai, F.-Y.; Huang, K.-I. Applying the Technology Acceptance Model to the introduction of healthcare information systems. Technol. Forecast. Soc. Chang. 2011, 78, 650–660. [Google Scholar] [CrossRef]
- Günthner, T.; Proff, H. On the way to autonomous driving: How age influences the acceptance of driver assistance systems. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 586–607. [Google Scholar] [CrossRef]
- Davis, F.D.; Venkatesh, V. Toward preprototype user acceptance testing of new information systems: Implications for software project management. IEEE Trans. Eng. Manag. 2004, 51, 31–46. [Google Scholar] [CrossRef]
- Lee, Y.; Kozar, K.A.; Larsen, K.R.T. The Technology Acceptance Model: Past, Present, and Future. Commun. Assoc. Inf. Syst. 2003, 12, 50. [Google Scholar] [CrossRef]
- King, W.R.; He, J. A meta-analysis of the technology acceptance model. Inf. Manag. 2006, 43, 740–755. [Google Scholar] [CrossRef]
- Rahman, M.; Lesch, M.F.; Horrey, W.J.; Strawderman, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid. Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research. Philos. Rhetor. 1975, 6, 244–245. [Google Scholar]
- Cho, Y.; Park, J.; Park, S.; Jung, E.S. Technology acceptance modeling based on user experience for autonomous vehicles. J. Ergon. Soc. Korea 2017, 36, 87–108. [Google Scholar]
- Buckley, L.; Kaye, S.-A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Lee, C.; Ward, C.; Raue, M.; D’Ambrosio, L.; Coughlin, J.F. Age differences in acceptance of self-driving cars: A survey of perceptions and attitudes. In Proceedings of the International Conference on Human Aspects of IT for the Aged Population, Vancouver, BC, Canada, 9–14 July 2017. [Google Scholar]
- Wu, J.; Liao, H.; Wang, J.-W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Kulviwat, S.; Ii, G.C.B.; Kumar, A.; Nasco, S.A.; Clark, T. Toward a unified theory of consumer acceptance technology. Psychol. Mark. 2007, 24, 1059–1084. [Google Scholar] [CrossRef]
- Enoch, M.; Ison, S.; Laws, R.; Zhang, L. Evaluation Study of Demand Responsive Transport Services in Wiltshire; Final Report; Loughborough University: Trowbridge, UK, 2006. [Google Scholar]
- de Oña, J. The role of involvement with public transport in the relationship between service quality, satisfaction and behavioral intentions. Transp. Res. Part A Policy Pract. 2020, 142, 296–318. [Google Scholar] [CrossRef]
- Pettigrew, S.; Sophie, L.C. Stakeholder views on the social issues relating to the introduction of autonomous vehicles. Transp. Policy 2019, 81, 64–67. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.-H.; Wang, S.-C. What drives mobile commerce? An empirical evaluation of the revised technology acceptance model. Inf. Manag. 2005, 42, 719–729. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.D. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef] [Green Version]
- Garidis, K.; Ulbricht, L.; Rossmann, A.; Schmäh, M. Toward a user acceptance model of autonomous driving. In Proceedings of the 53rd Hawaii International Conference on System Sciences, Wailea-Makena, HI, USA, 7–10 January 2020. [Google Scholar]
- Nordhoff, S.; de Winter, J.; Payre, W.; van Arem, B.; Happee, R. What impressions do users have after a ride in an automated shuttle? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 252–269. [Google Scholar] [CrossRef] [Green Version]
- Han, H.; Hyun, S.S. Impact of hotel-restaurant image and quality of physical-environment, service, and food on satisfaction and intention. Int. J. Hosp. Manag. 2017, 63, 82–92. [Google Scholar] [CrossRef]
- Zeithaml, V.A. Consumer Perceptions of Price, Quality, and Value: A Means-End Model and Synthesis of Evidence. J. Mark. 1988, 52, 2–22. [Google Scholar] [CrossRef]
- Su, D.N.; Nguyen-Phuoc, D.Q.; Johnson, L.W. Effects of perceived safety, involvement and perceived service quality on loyalty intention among ride-sourcing passengers. Transportation 2019, 48, 369–393. [Google Scholar] [CrossRef]
- Asubonteng, P.; McCleary, K.J.; Swan, J.E. SERVQUAL revisited: A critical review of service quality. J. Serv. Mark. 1996, 10, 62–81. [Google Scholar] [CrossRef]
- Parasuraman, A.; Zeithaml, V.A.; Berry, L.L. SERVQUAL: A multiple-item scale for measuring consumer perceptions of service quality. J. Retail. 1988, 64, 12. [Google Scholar]
- Grönroos, C. A Service Quality Model and its Marketing Implications. Eur. J. Mark. 1984, 18, 36–44. [Google Scholar] [CrossRef]
- Garvin, D. Quality on the line. Harv. Bus. Rev. 1983, 9, 65–75. [Google Scholar]
- Oliver, R.L. A Cognitive Model of the Antecedents and Consequences of Satisfaction Decisions. J. Mark. Res. 1980, 17, 460–469. [Google Scholar] [CrossRef]
- Ahern, Z.; Paz, A.; Corry, P. Approximate multi-objective optimisation for integrated bus route design and service frequency setting. Transp. Res. Part B Methodol. 2022, 155, 1–25. [Google Scholar] [CrossRef]
- Wang, T.-L.; Tran, P.T.K.; Tran, V.T. Destination perceived quality, tourist satisfaction and word-of-mouth. Tour. Rev. 2017, 72, 392–410. [Google Scholar] [CrossRef]
- Tyrinopoulos, Y.; Antoniou, C. Review of factors affecting transportation systems adoption and satisfaction. In Demand for Emerging Transportation Systems; Elviser: Amsterdam, The Netherlands, 2019; pp. 11–36. [Google Scholar]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Research. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A survey of public opinion about connected vehicles in the U.S., the U.K., and Australia. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 687–692. [Google Scholar]
- Rittichainuwat, B.N. Tourists’ Perceived Risks Toward Overt Safety Measures. J. Hosp. Tour. Res. 2011, 37, 199–216. [Google Scholar] [CrossRef]
- Liu, H.; Yang, R.; Wang, L.; Liu, P. Evaluating Initial Public Acceptance of Highly and Fully Autonomous Vehicles. Int. J. Human Comput. Interact. 2019, 35, 919–931. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public Acceptance of Fully Automated Driving: Effects of Social Trust and Risk/Benefit Perceptions: Public Acceptance of Fully Automated Driving. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef] [PubMed]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- DeVellis, R. Scale Development: Theory and Applications; Thousand Okas: London, UK; New Delhi, India, 2003. [Google Scholar]
- Kim, Y.G.; Eves, A. Construction and validation of a scale to measure tourist motivation to consume local food. Tour. Manag. 2012, 33, 1458–1467. [Google Scholar] [CrossRef]
- Jensen, A.F.; Cherchi, E.; Ortúzar, J.D.D. A long panel survey to elicit variation in preferences and attitudes in the choice of electric vehicles. Transportation 2014, 41, 973–993. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef] [Green Version]
- Cooper, C.; Schindler, P. Business Research Methods; McGraw-Hill: Boston, MA, USA, 2008. [Google Scholar]
- Rashid, K.; Yigitcanlar, T. A methodological exploration to determine transportation disadvantage variables: The partial least square approach. World Rev. Intermodal Transp. Res. 2015, 5, 221–239. [Google Scholar] [CrossRef]
- Krejcie, R.V.; Morgan, D.W. Determining sample size for research activities. Educ. Psychol. Meas. 1970, 30, 607–610. [Google Scholar] [CrossRef]
- Tabachnick, B.G.; Fidell, L.S. Using Multivariate Statistics, 4th ed.; HarperCollins: New York, NY, USA, 2001. [Google Scholar]
- Stevens, J. Applied Multivariate Statistics for the Social Sciences, 3rd ed.; Lawrence Erlbaum: Mahway, NJ, USA, 1996. [Google Scholar]
- Daoud, J.I. Multicollinearity and Regression Analysis. J. Phys. Conf. Ser. 2017, 949, 012009. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Black, W.C.; Babin, B.J.; Anderson, R.E. Multivariate Data Analysis: A Global Perspective, 7th ed.; Pearson Education: Upper Saddle River, NJ, USA, 2010; p. 785. [Google Scholar]
- Gefen, D.; Straub, D. A Practical Guide to Factorial Validity Using PLS-Graph: Tutorial and Annotated Example. Commun. Assoc. Inf. Syst. 2005, 16, 5. [Google Scholar] [CrossRef] [Green Version]
- Hair, J.F.; Ringle, C.M.; Sarstedt, M. PLS-SEM: Indeed a Silver Bullet. J. Mark. Theory Pract. 2011, 19, 139–152. [Google Scholar] [CrossRef]
- Müller, J.M. Comparing Technology Acceptance for Autonomous Vehicles, Battery Electric Vehicles, and Car Sharing—A Study across Europe, China, and North America. Sustainability 2019, 11, 4333. [Google Scholar] [CrossRef] [Green Version]
- Lowry, P.B.; Gaskin, J. Partial Least Squares (PLS) Structural Equation Modeling (SEM) for Building and Testing Behavioral Causal Theory: When to Choose It and How to Use It. IEEE Trans. Dependable Secur. Comput. 2014, 57, 123–146. [Google Scholar] [CrossRef]
- Astuti, S.; Rukmana, D. Student satisfaction on the implementation of the online undergraduate thesis examination: A PLS-SEM analysis. Qual. Assur. Educ. 2021, 29, 491–508. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Hult, G.T.M.; Ringle, C.M.; Sarstedt, M. A Primer on Partial Least Squares Structural Equation Modeling (PLS-SEM); Sage Publications: Newbury Park, CA, USA, 2021. [Google Scholar]
- Henseler, J.; Ringle, C.M.; Sinkovics, R.R. The use of partial least squares path modeling in international marketing. In New Challenges to International Marketing; Sinkovics, R.R., Ghauri, P.N., Eds.; Emerald Group Publishing Limited: Bingley, UK, 2009; pp. 277–319. [Google Scholar]
- Ringle, C.M.; Wende, S.; Becker, J.-M. SmartPLS 3. Boenningstedt; SmartPLS GmbH: Oststeinbek, Germany, 2015. [Google Scholar]
- Haenlein, M.; Kaplan, A.M. A beginner’s guide to partial least squares analysis. Underst. Stat. 2004, 3, 283–297. [Google Scholar] [CrossRef]
- Petter, S.; Straub, D.; Rai, A. Specifying Formative Constructs in Information Systems Research. MIS Q. 2007, 31, 623–656. [Google Scholar] [CrossRef] [Green Version]
- Hair, J.F.; Anderson, R.E.; Black, B.; Babin, B.J.; Black, W.C. Multivariate Data Analysis; Pearson Education, Limited: Upper Saddle River, NJ, USA, 2013. [Google Scholar]
- Gefen, D.; Straub, D.; Boudreau, M.-C. Structural Equation Modeling and Regression: Guidelines for Research Practice. Commun. Assoc. Inf. Syst. 2020, 4, 7. [Google Scholar] [CrossRef] [Green Version]
- Fornell, C.; Larcker, D.F. Evaluating Structural Equation Models with Unobservable Variables and Measurement Error. J. Mark. Res. 1981, 18, 39. [Google Scholar] [CrossRef]
- Straub, D.; Boudreau, M.-C.; Gefen, D. Validation guidelines for IS positivist research. Commun. Assoc. Inf. Syst. 2004, 13, 24. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Sarstedt, M.; Hopkins, L.; Kuppelwieser, V.G. Partial least squares structural equation modeling (PLS-SEM): An emerging tool in business research. Eur. Bus. Rev. 2014, 26, 106–121. [Google Scholar] [CrossRef]
- Nunnally, J.C. Psychometric Theory 3E; Tata McGraw-Hill Education: New York, NY, USA, 1994. [Google Scholar]
- Cronbach, L.J. Coefficient alpha and the internal structure of tests. Psychometrika 1951, 16, 297–334. [Google Scholar] [CrossRef] [Green Version]
- Bagozzi, R.P.; Yi, Y. On the evaluation of structural equation models. J. Acad. Mark. Sci. 1988, 16, 74–94. [Google Scholar] [CrossRef]
- Henseler, J.; Ringle, C.M.; Sarstedt, M. Testing measurement invariance of composites using partial least squares. Int. Mark. Rev. 2016, 33, 405–431. [Google Scholar] [CrossRef]
- Chin, W.W. The partial least squares approach to structural equation modeling. Mod. Methods Bus. Res. 1998, 295, 295–336. [Google Scholar]
- Hayes, A.F. Beyond Baron and Kenny: Statistical Mediation Analysis in the New Millennium. Commun. Monogr. 2009, 76, 408–420. [Google Scholar] [CrossRef]
- Stone, M. Cross-Validatory Choice and Assessment of Statistical Predictions. J. R. Stat. Soc. Ser. B Methodol. 1974, 36, 111–133. [Google Scholar] [CrossRef]
- Geisser, S. A predictive approach to the random effect model. Biometrika 1974, 61, 101–107. [Google Scholar] [CrossRef]
- Harlow, L.L. The Essence of Multivariate Thinking: Basic Themes and Methods, 2nd ed.; Routledge: New York, NY, USA, 2014. [Google Scholar]
- Keszey, T. Behavioural intention to use autonomous vehicles: Systematic review and empirical extension. Transp. Res. Part C Emerg. Technol. 2020, 119, 102732. [Google Scholar] [CrossRef]
- Machado, J.L.; de Oña, R.; Diez-Mesa, F.; de Oña, J. Finding service quality improvement opportunities across different typologies of public transit customers. Transp. A Transp. Sci. 2018, 14, 761–783. [Google Scholar] [CrossRef]
- Kuo, C.-W.; Tang, M.-L. Relationships among service quality, corporate image, customer satisfaction, and behavioral intention for the elderly in high speed rail services. J. Adv. Transp. 2011, 47, 512–525. [Google Scholar] [CrossRef]
- Koklic, M.K.; Kukar-Kinney, M.; Vegelj, S. An investigation of customer satisfaction with low-cost and full-service airline companies. J. Bus. Res. 2017, 80, 188–196. [Google Scholar] [CrossRef]
- Kelley, B. Public health, autonomous automobiles, and the rush to market. J. Public Health Policy 2017, 38, 167–184. [Google Scholar] [CrossRef] [PubMed]
- Smith, D. Robocar versus the Pod: A commentary on the state of play in the race for autonomous vehicle commercialisation. Constr. Res. Innov. 2017, 8, 60–65. [Google Scholar] [CrossRef]
- Esterwood, C.; Yang, X.J.; Robert, L.P. Barriers to AV Bus Acceptance: A National Survey and Research Agenda. Int. J. Hum. Comput. Interact. 2021, 37, 1391–1403. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Sabatini-Marques, J.; da-Costa, E.; Kamruzzaman, M.; Ioppolo, G. Stimulating technological innovation through incentives: Perceptions of Australian and Brazilian firms. Tech. Forec. Soc. Chan. 2019, 146, 403–412. [Google Scholar] [CrossRef] [Green Version]
- Kamruzzaman, M.; Hine, J.; Yigitcanlar, T. Investigating the link between carbon dioxide emissions and transport-related social exclusion in rural Northern Ireland. Int. J. Environ. Sci. Technol. 2015, 12, 3463–3478. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Author | Focus | Data Collection Method | Analysis Method | Investigated Constructs | R2 (Variance Explained) |
|---|---|---|---|---|---|
| Zhang et al. [25] | AV | Online survey | PLS-SEM | TR, SI, Sensation seeking, Big Five personality, PU, PEU → INT | 0.54 |
| Nastjuk et al. [40] | AV | Qualitative research, online survey | PLS-SEM | SN, LOC, PPR, TR, EA, PI, RA, Co, enjoyment, PrE, PU, PEU, ATT → INT | n/a |
| Motamedi et al. [41] | Personally owned/shared-use AV | Focus groups, Online survey | CFA, SEM | TR, Co, PSa, PU, PEU → INT | 0.91 0.77 |
| Dirsehan & Can [42] | AV | Online survey | SEM | TR, sustainability concerns, PU, PEU → INT | 0.57 |
| Zhang et al. [56] | AV | Interview | SEM | PEU, PU, PSR, PPR → TR → ATT → INT | 0.56, 0.67, 0.61 |
| Wu et al. [58] | AV | Online survey | SEM | Environmental concern, Green perceived usefulness, PEU → INT | n/a |
| Lee et al. [57] | AV | Online survey | PLS-SEM | SE, RA, Psychological ownership, PR, PU, PEU → INT | 0.52 |
| Herrenkind et al. [30] | ASB | Online survey | PLS-SEM | EA, Openness to Shared Use, PPR, TR, PEn, RA, PrE, Residence, Family Budget, Education, Social Network → INT | 0.52 |
| Herrenkind et al. [29] | ASB | Qualitative research, interview; revealed preference | CFA, SEM | TR, LOC, PPR, EA, PI, image, SN, PEn, RA, PrE, PU, PEU, ATT → INT | n/a |
| Xu et al. [24] | AV | Field experiment | SEM | TR → PU, PEU, PSa → INT Willingness to re-ride | 0.55 0.40 |
| Panagiotopoulos & Dimitrakopoulos [55] | AV | Online survey | Multiple linear regression | PU, PEU, TR, SI → INT | 0.44 |
| Buckley et al. [54] | AV | Interview, revealed preference | bivariate correlations, Hierarchical regression | TR, ATT, SN, PBC → INT TR, PU, PEU → INT | 0.49 0.44 |
| Construct | Measure | Source |
|---|---|---|
| Perceived Service Quality (PSQ) | Punctuality (on-time performance) ** Privacy (sharing the shuttle space with other passengers) ** Comfort (ease of entrance and exit from the vehicle/stations) ** Affordability (fare price) ** Safety on board (regarding accidents) ** Flexibility (frequency or number of daily services) ** Convenience (Individual space available inside the vehicle) ** Speed (getting places quicker) ** | [61] |
| Perceived Relative Advantages (PRA) | I believe that ASBs will be safer than conventional shuttles. * I believe that ASBs will be more efficient than conventional shuttles. * ASBs can reduce the need for conventional shuttles. * ASBs can reduce traffic congestion and pollutant emissions compared with conventional shuttles. * There will be fewer driver errors, in the case of using ASBs. * ABSs can allow better access to my intended destinations than other available travel modes. * | Self-developed, where items were from [29,30] |
| Perceived Risks (PR) | Unreliable technology (trip interruption) * Traffic safety on board (regarding accidents) * AVs won’t respond in dangerous situations * | Modified from [83] |
| Perceived Ease of Use (PEU) | I believe it would be easy for me to understand/learn how to book a ride. * I believe it would be easy to learn how to interact with ASBs. * I believe it would be easy to learn how to travel in an ASB. * | Modified from [27] |
| Perceived Usefulness (PU) | Riding in ASBs can reduce the stress of driving. * Using ASBs can increase my living and working productivity by reducing the time I spend driving. * I can see more possibilities for my mobility with ASBs. * ASB transport services can serve my travel needs well. * ASB transport service can be a good mobility solution for people who are unable to drive like disabled persons or the elderly. * | Self-developed, where items were from [83] |
| Attitude Toward Use (ATT) | I believe that ASBs will be more attractive to use than conventional shuttles. * I have a positive attitude toward ASBs. * | Modified from [88] |
| Intention to Use (INT) | If shuttles become available, I will give priority to using them over using a car. * I would be happy to ride in an ASB. * | Modified from [89] |
| Predictor Variable | Category | Frequency (n = 300) | Distribution (%) | Collinearity (VIF) |
|---|---|---|---|---|
| Gender | Male | 105 | 35.0 | 1.271 |
| Female: 195 | 195 | 65.0 | ||
| Age | 18–35 | 108 | 36.0 | 1.965 |
| 36–50 | 53 | 17.7 | ||
| 51–65 | 58 | 19.3 | ||
| 66 or higher | 81 | 27.0 | ||
| Education | High School | 109 | 36.3 | 1.104 |
| Vocational | 109 | 36.3 | ||
| Tertiary | 82 | 27.4 | ||
| Employment | Retired, Homemaker, or Not Employed | 138 | 46.0 | 1.531 |
| Part-time or Casual Employed | 72 | 24.0 | ||
| Full-time or Self Employed | 90 | 30.0 | ||
| Household income | Nil to $15,599 | 37 | 12.3 | 1.202 |
| $15,600 to $31,199 | 43 | 14.3 | ||
| $31,200 to $51,999 | 55 | 18.4 | ||
| $52,000 to $77,999 | 65 | 21.7 | ||
| $78,000 to $103,999 | 54 | 18.0 | ||
| $104,000 or more | 46 | 15.3 | ||
| Residential location | Peri-urban | 200 | 67.0 | 1.151 |
| Urban | 100 | 33.0 | ||
| Household size | 1 | 66 | 22.0 | 1.355 |
| 2 | 119 | 39.7 | ||
| 3 | 42 | 14.0 | ||
| 4 | 43 | 14.3 | ||
| 5 or more | 30 | 10.0 |
| Criterion | Description |
|---|---|
| The composite reliability is a measure of internal consistency and must not be lower than 0.6. , the outer (component) loading to an indicator, and in the case of standardized indicators. | |
| Indicator reliability | Absolute standardized outer (component) loadings should be higher than 0.7. |
| Average variance extracted (AVE) | , where is the component loading to an indicator and in the case of standardized indicators. The average variance extracted should be higher than 0.5. |
| Fornell–Larcker criterion | To ensure discriminant validity, the AVE of each latent variable should be higher than the squared correlations with all other latent variables. Thereby, each latent variable shares more variance with its block of indicators than with another latent variable representing a different block of indicators. |
| Cross-loadings | Cross-loadings offer another check for discriminant validity. If an indicator has a higher correlation with another latent variable than with its respective latent variable, the appropriateness of the model should be reconsidered. |
| Coefficient Alpha (CA > 0.7) | Composite Reliability (CR > 0.7) | Average Variance Extracted (AVE > 0.5) | ATT | INT | PEU | PRA | PR | PSQ | PU | |
|---|---|---|---|---|---|---|---|---|---|---|
| ATT | 0.716 | 0.876 | 0.779 | 0.882 | ||||||
| INT | 0.712 | 0.874 | 0.776 | 0.575 | 0.881 | |||||
| PEU | 0.810 | 0.887 | 0.724 | 0.598 | 0.504 | 0.851 | ||||
| PRA | 0.891 | 0.916 | 0.646 | 0.490 | 0.354 | 0.587 | 0.804 | |||
| PR | 0.873 | 0.922 | 0.797 | −0.300 | −0.291 | −0.149 | −0.113 | 0.893 | ||
| PSQ | 0.886 | 0.908 | 0.555 | 0.522 | 0.442 | 0.475 | 0.352 | −0.276 | 0.745 | |
| PU | 0.897 | 0.924 | 0.709 | 0.586 | 0.524 | 0.688 | 0.506 | −0.132 | 0.469 | 0.842 |
| Latent Construct | Loadings > 0.6 | VIF | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Indicator | ATT | INT | PEU | PR | PRA | PSQ | PU | ||
| Attitude | ATT1 | 0.872 | 0.474 | 0.518 | 0.479 | −0.282 | 0.409 | 0.475 | 1.452 |
| ATT2 | 0.893 | 0.538 | 0.538 | 0.391 | −0.250 | 0.508 | 0.556 | 1.452 | |
| Usage Intention | INT1 | 0.565 | 0.895 | 0.480 | 0.388 | −0.219 | 0.435 | 0.462 | 1.441 |
| INT2 | 0.442 | 0.867 | 0.405 | 0.227 | −0.300 | 0.340 | 0.463 | 1.441 | |
| PEU1 | 0.492 | 0.364 | 0.788 | 0.461 | −0.195 | 0.365 | 0.465 | 1.547 | |
| Perceived Ease of Use | PEU2 | 0.411 | 0.401 | 0.879 | 0.442 | −0.163 | 0.393 | 0.620 | 2.132 |
| PEU3 | 0.608 | 0.506 | 0.883 | 0.581 | −0.046 | 0.447 | 0.653 | 1.940 | |
| Perceived Risks | PR1 | −0.292 | −0.254 | −0.156 | −0.124 | 0.903 | −0.258 | −0.127 | 2.455 |
| PR2 | −0.276 | −0.248 | −0.144 | −0.099 | 0.899 | −0.232 | −0.116 | 2.461 | |
| PR3 | −0.235 | −0.279 | −0.097 | −0.078 | 0.877 | −0.249 | −0.110 | 2.149 | |
| Perceived Relative Advantages | PRA1 | 0.315 | 0.219 | 0.437 | 0.822 | −0.066 | 0.238 | 0.389 | 2.709 |
| PRA2 | 0.335 | 0.223 | 0.411 | 0.788 | −0.111 | 0.267 | 0.387 | 2.366 | |
| PRA3 | 0.392 | 0.283 | 0.522 | 0.819 | −0.067 | 0.314 | 0.415 | 2.251 | |
| PRA4 | 0.420 | 0.316 | 0.432 | 0.772 | −0.105 | 0.307 | 0.372 | 1.923 | |
| PRA5 | 0.402 | 0.299 | 0.475 | 0.855 | −0.071 | 0.298 | 0.414 | 2.675 | |
| PRA6 | 0.468 | 0.340 | 0.529 | 0.764 | −0.118 | 0.264 | 0.446 | 1.701 | |
| Perceived Service Quality | PSQ1 | 0.212 | 0.242 | 0.207 | 0.109 | −0.124 | 0.637 | 0.209 | 1.774 |
| PSQ2 | 0.503 | 0.454 | 0.407 | 0.308 | −0.271 | 0.798 | 0.477 | 2.018 | |
| PSQ3 | 0.392 | 0.306 | 0.376 | 0.279 | −0.263 | 0.758 | 0.330 | 2.043 | |
| PSQ4 | 0.476 | 0.374 | 0.425 | 0.347 | −0.262 | 0.825 | 0.417 | 2.329 | |
| PSQ5 | 0.277 | 0.264 | 0.243 | 0.115 | −0.145 | 0.708 | 0.270 | 1.965 | |
| PSQ6 | 0.414 | 0.294 | 0.356 | 0.284 | −0.168 | 0.765 | 0.351 | 2.146 | |
| PSQ7 | 0.311 | 0.274 | 0.354 | 0.241 | −0.152 | 0.692 | 0.302 | 1.871 | |
| PSQ8 | 0.400 | 0.350 | 0.383 | 0.311 | −0.195 | 0.760 | 0.339 | 1.983 | |
| Perceived Usefulness | PU1 | 0.483 | 0.505 | 0.605 | 0.411 | −0.089 | 0.390 | 0.860 | 2.828 |
| PU2 | 0.481 | 0.398 | 0.570 | 0.438 | −0.051 | 0.315 | 0.851 | 2.760 | |
| PU3 | 0.508 | 0.474 | 0.596 | 0.469 | −0.120 | 0.417 | 0.854 | 2.390 | |
| PU4 | 0.514 | 0.436 | 0.536 | 0.389 | −0.163 | 0.456 | 0.825 | 2.120 | |
| PU5 | 0.481 | 0.385 | 0.587 | 0.420 | −0.131 | 0.394 | 0.819 | 2.098 | |
| ATT | INT | PEU | PRA | PR | PSQ | PU | |
|---|---|---|---|---|---|---|---|
| ATT | |||||||
| INT | 0.798 | ||||||
| PEU | 0.777 | 0.652 | |||||
| PRA | 0.608 | 0.431 | 0.678 | ||||
| PR | 0.380 | 0.373 | 0.187 | 0.126 | |||
| PSQ | 0.625 | 0.537 | 0.541 | 0.374 | 0.301 | ||
| PU | 0.729 | 0.654 | 0.798 | 0.562 | 0.149 | 0.506 |
| Criterion | Description |
|---|---|
| of endogenous latent variables | values of 0.67, 0.33, or 0.19 for endogenous latent variables in the inner path model are described as substantial, moderate, or weak [116]. |
| Estimates for path coefficients | The estimated values for path relationships in the structural model should be evaluated in terms of the sign, magnitude, and significance (the latter via bootstrapping). |
| ) | is calculated based on the blindfolding procedure: D: the omission distance, SSE: the sum of squares of prediction errors, and SSO: the sum of squares of observations. give evidence that the observed values are well reconstructed and that the model has predictive relevance, ( indicates a lack of predictive relevance). |
| Proposed Hypotheses | Effect | β | T-Value | p-Value | Results | |
|---|---|---|---|---|---|---|
| H1 | Perceived Ease of Use (PEU) + → Attitude (ATT) | + | 0.23 | 2.92 | 0 | Supported |
| H2 | Perceived Usefulness (PU) + → Attitude (ATT) | + | 0.24 | 3.30 | 0 | Supported |
| H3 | Perceived Ease of Use (PEU) + → Perceived Usefulness (PU) | + | 0.53 | 7.94 | 0 | Supported |
| H4 | Perceived Usefulness (PU) + → Usage Intention (INT) | + | 0.26 | 3.76 | 0 | Supported |
| H5 | Attitude (ATT) + → Usage Intention (INT) | + | 0.32 | 4.43 | 0 | Supported |
| H6 | Perceived Service Quality (PSQ) + → Perceived Usefulness (PU) | + | 0.17 | 3.09 | 0 | Supported |
| H7 | Perceived Service Quality (PSQ) + → Attitude (ATT) | + | 0.21 | 3.34 | 0 | Supported |
| H8 | Perceived Service Quality (PSQ) + → Usage Intention (INT) | + | 0.11 | 1.82 | 0.07 | Not supported |
| H9 | Perceived Relative Advantage (PRA) + → Perceived Usefulness (PU) | + | 0.14 | 2.45 | 0.01 | Supported |
| H10 | Perceived Relative Advantage (PRA) + → Attitude (ATT) | + | 0.15 | 2.64 | 0.01 | Supported |
| H11 | Perceived Relative Advantage (PRA) + → Usage Intention (INT) | + | 0.01 | 0.19 | 0.85 | Not supported |
| H12 | Perceived Risks (PR) + → Perceived Usefulness (PU) | + | 0.01 | 0.27 | 0.78 | Not supported |
| H13 | Perceived Risks (PR) - → Attitude (ATT) | − | −0.16 | 3.65 | 0 | Supported |
| H14 | Perceived Risks (PR) - → Usage Intention (INT) | − | −0.13 | 2.75 | 0.01 | Supported |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Understanding Autonomous Shuttle Adoption Intention: Predictive Power of Pre-Trial Perceptions and Attitudes. Sensors 2022, 22, 9193. https://doi.org/10.3390/s22239193
Golbabaei F, Yigitcanlar T, Paz A, Bunker J. Understanding Autonomous Shuttle Adoption Intention: Predictive Power of Pre-Trial Perceptions and Attitudes. Sensors. 2022; 22(23):9193. https://doi.org/10.3390/s22239193
Chicago/Turabian StyleGolbabaei, Fahimeh, Tan Yigitcanlar, Alexander Paz, and Jonathan Bunker. 2022. "Understanding Autonomous Shuttle Adoption Intention: Predictive Power of Pre-Trial Perceptions and Attitudes" Sensors 22, no. 23: 9193. https://doi.org/10.3390/s22239193