
Realization of Crowded Pipes Climbing Locomotion of Snake Robot Using Hybrid Force–Position Control Method


Abstract
:1. Introduction
2. Model Design
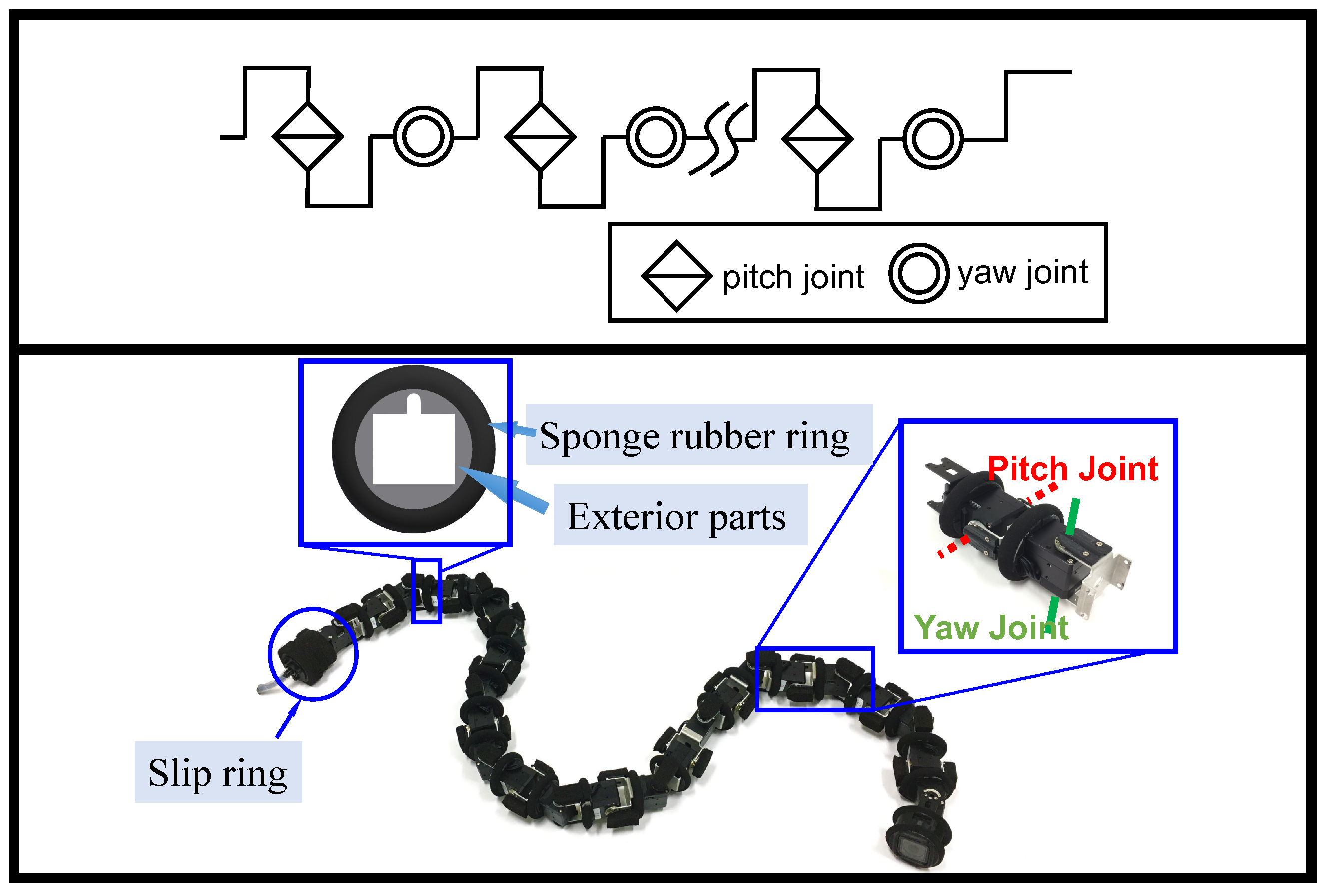
2.1. Snake Robot Model Design
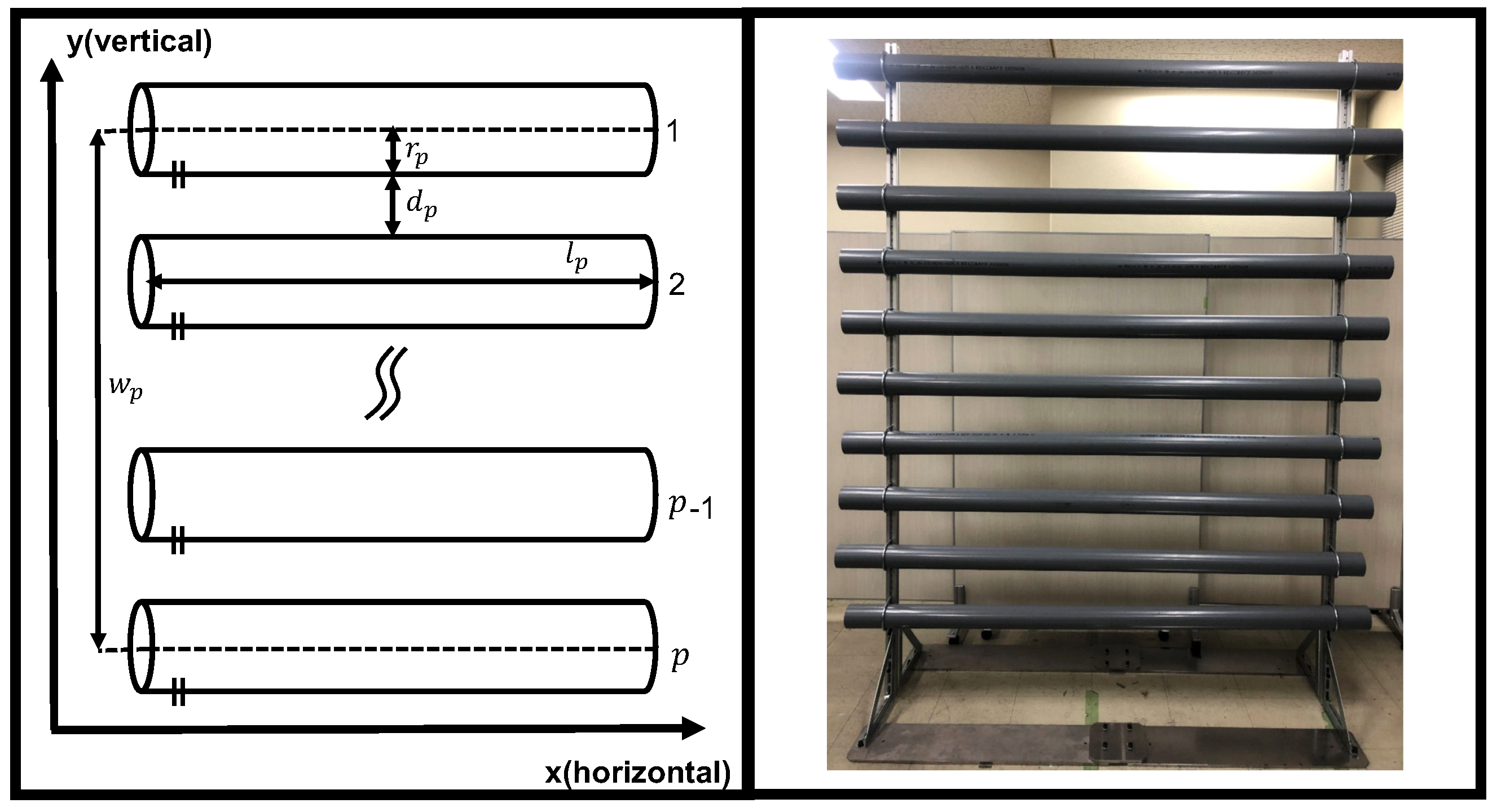
2.2. Environment Model Design
3. Control Methods
3.1. Nominal Hybrid Force–Position Control for Crowded Pipes
3.1.1. Definition of Nominal Position
3.1.2. Definition of Nominal Torques at Different Positions
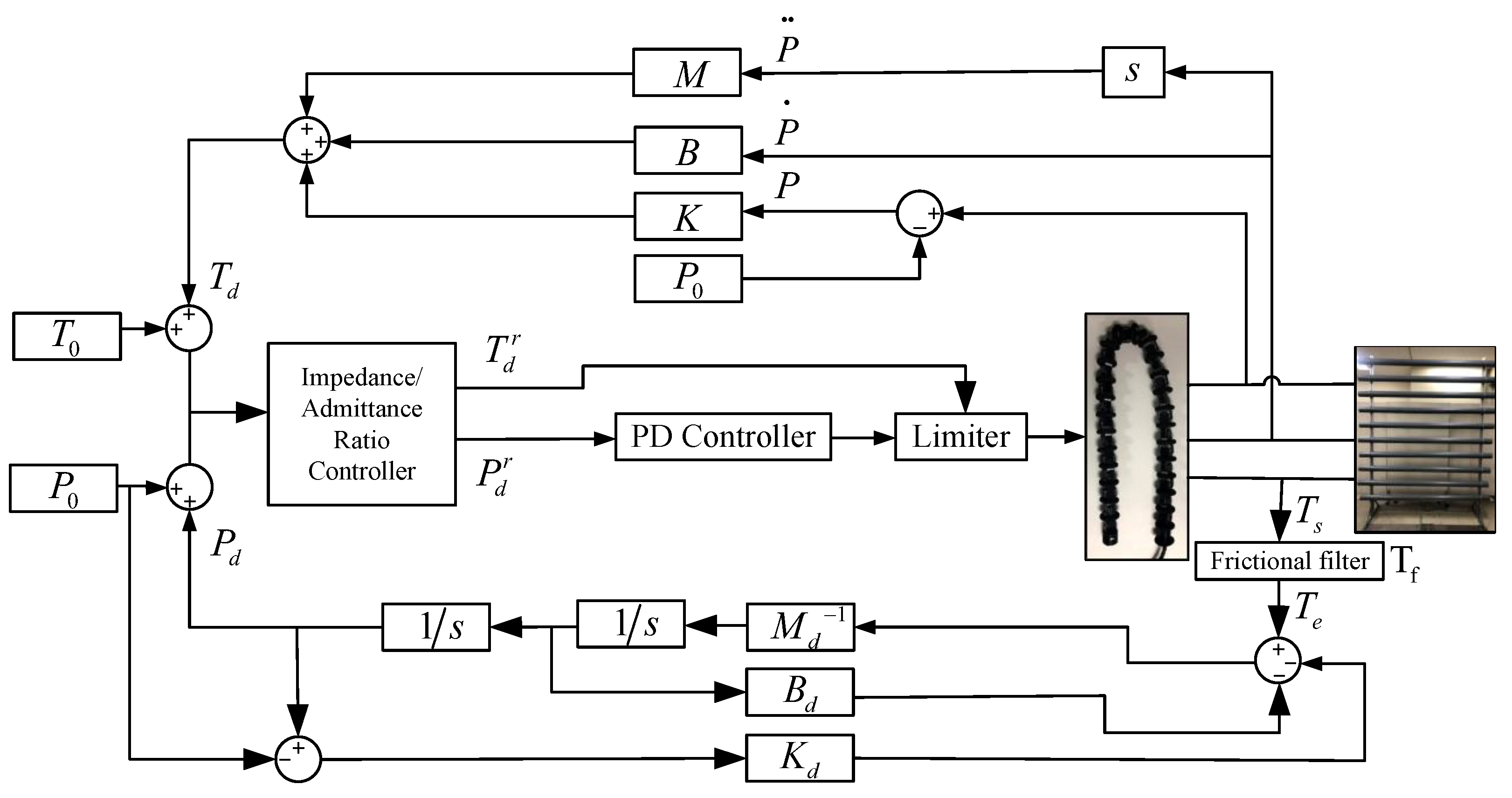
3.2. Closed-Loop Control of Hybrid Force–Position Control
3.2.1. Force-Based Impedance Control
3.2.2. Position-Based Admittance Control
3.2.3. Impedance/Admittance Ratio Factor r
4. Experiments
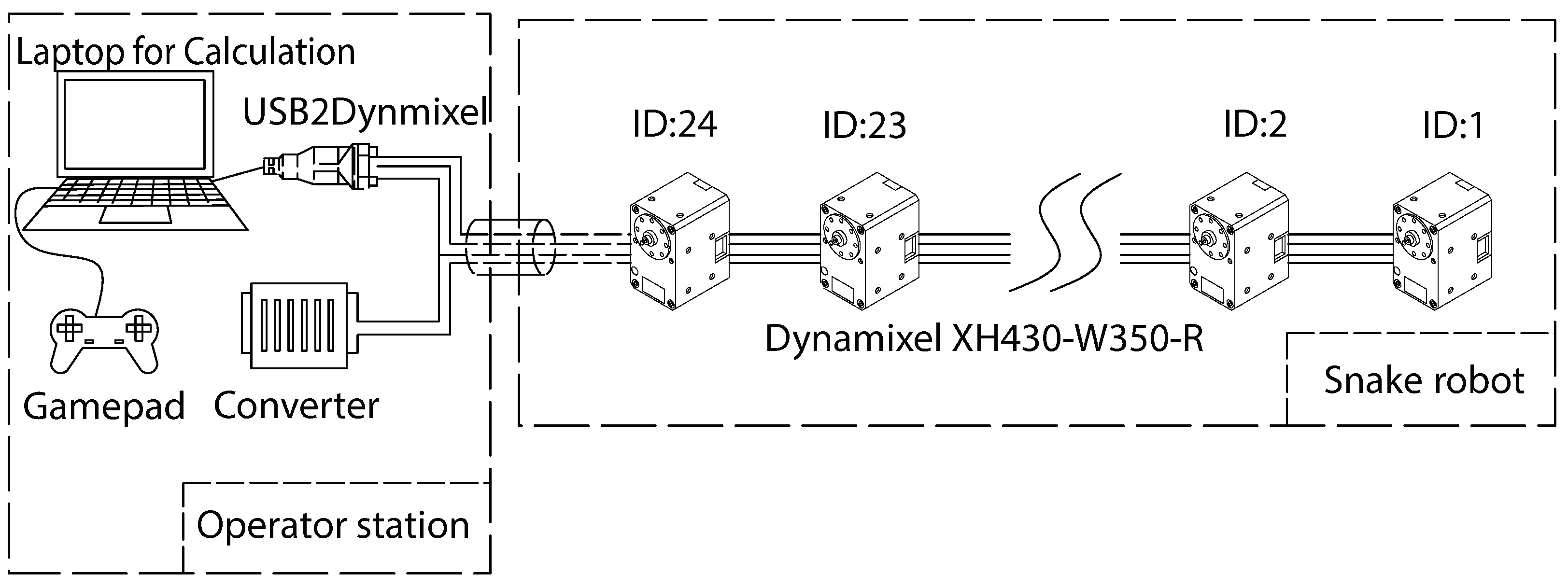
4.1. Experimental Equipment
4.2. Controller Setting
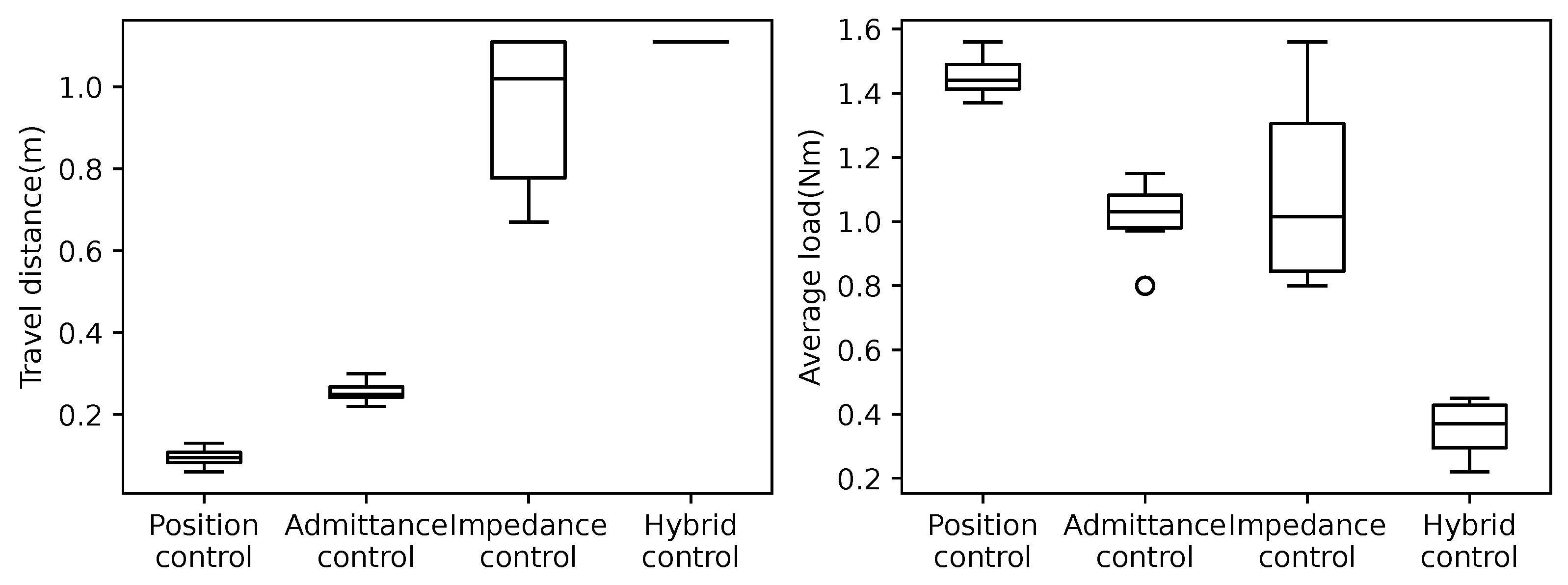
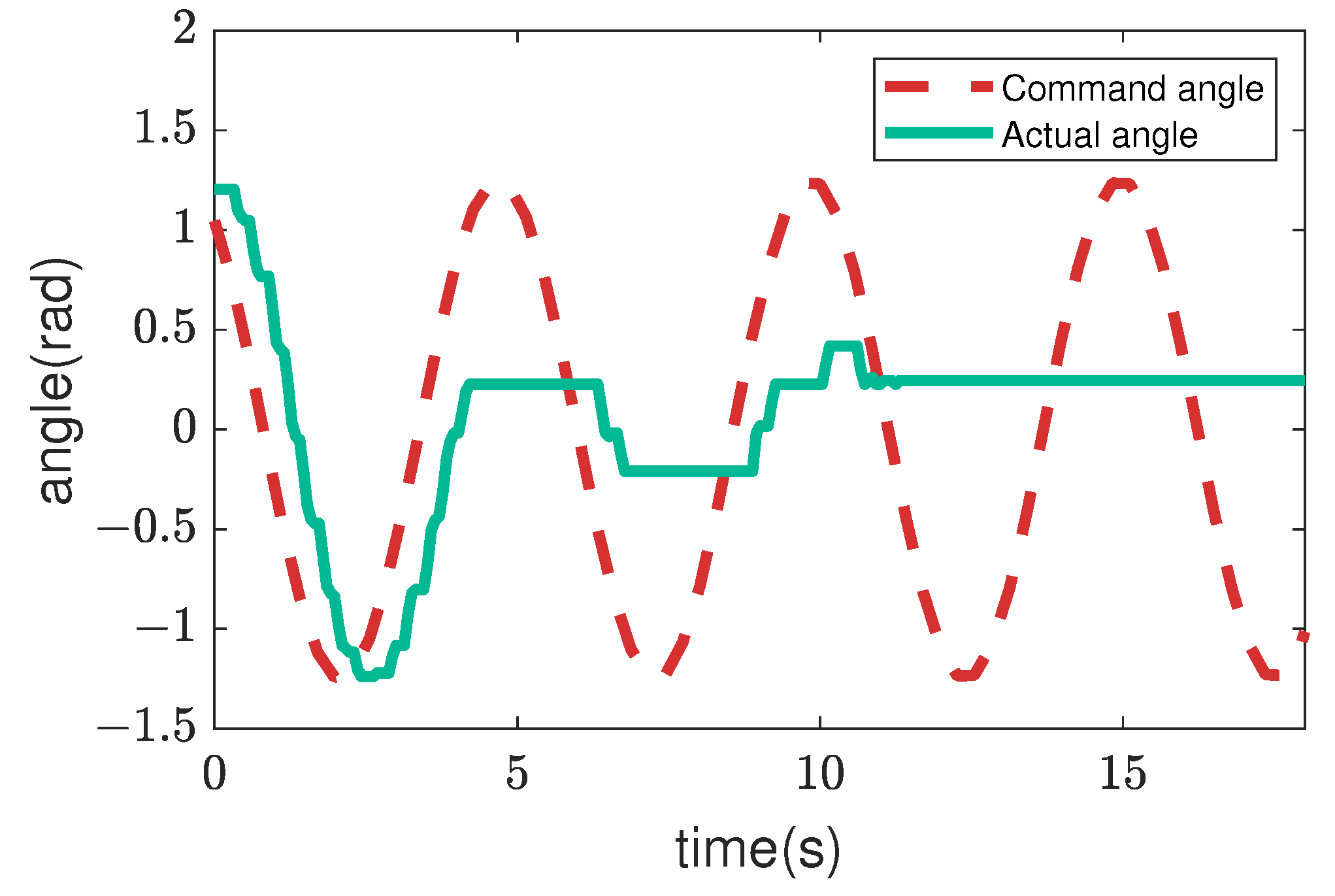
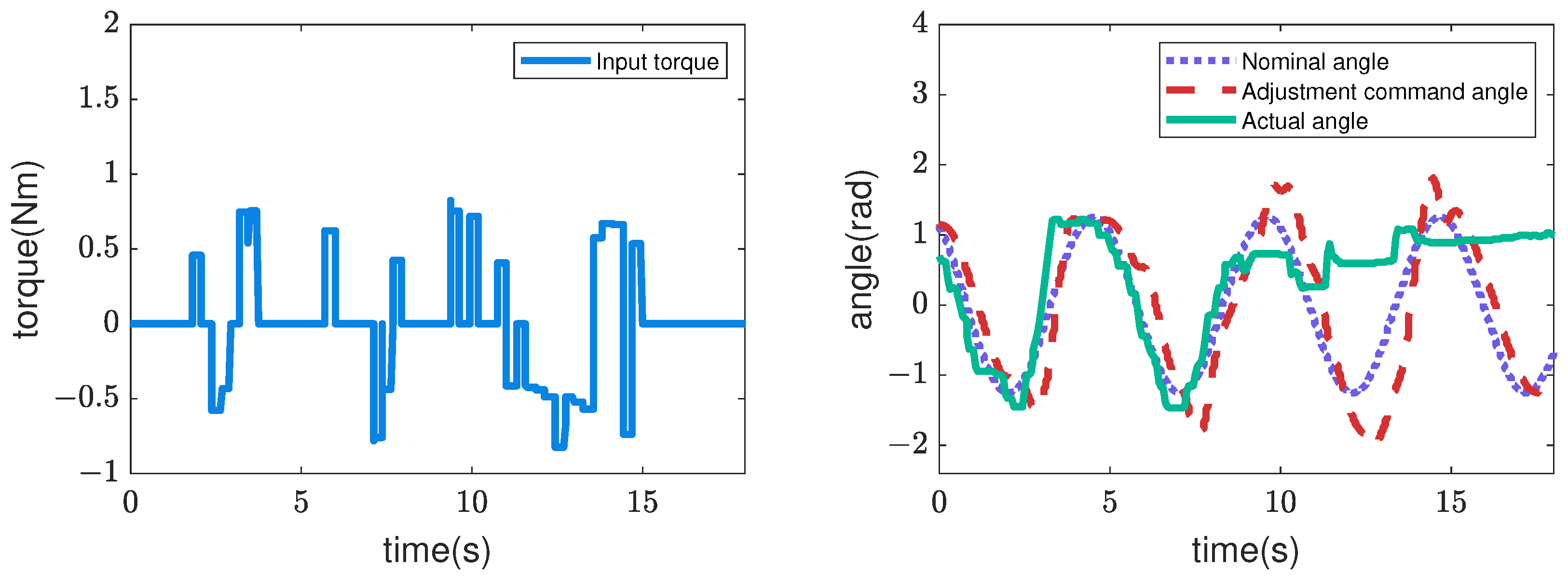
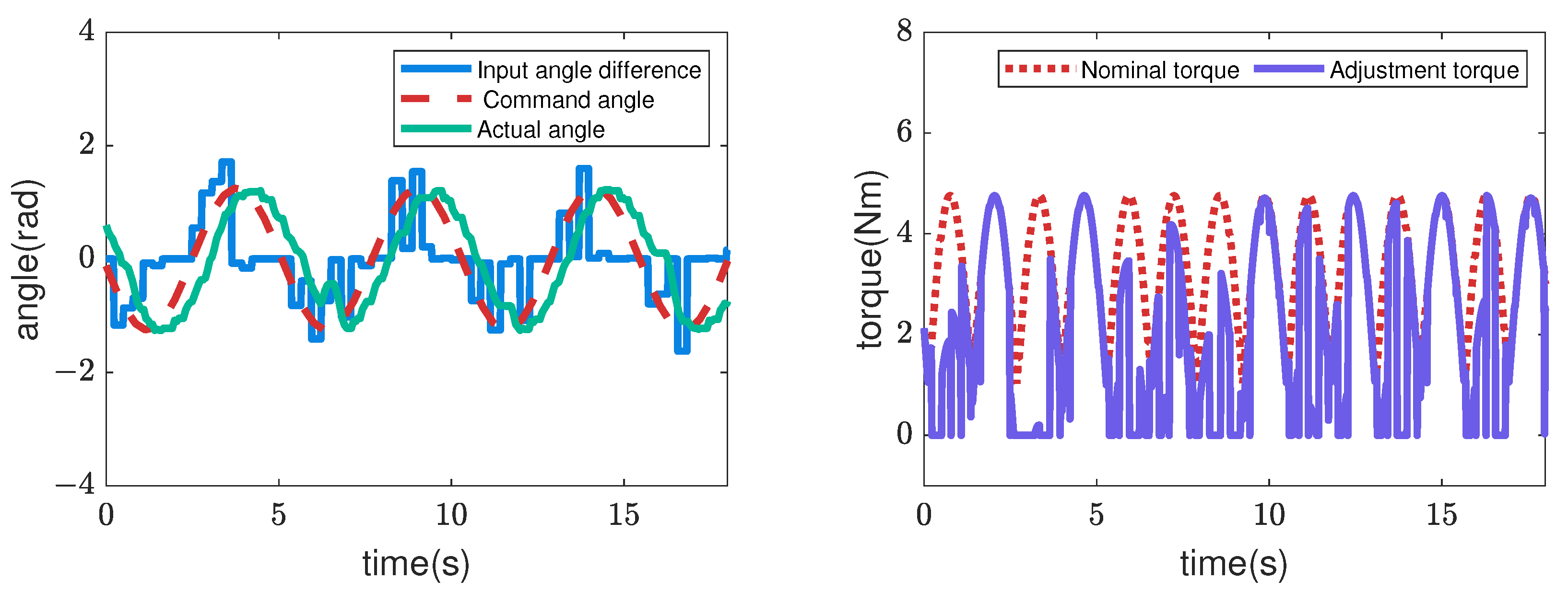
4.3. Experimental Results
- The pure position control.
- The admittance control ().
- The impedance control ().
- The hybrid impedance/admittance control ().
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hirose, S. Biologically Inspired Robots: Snake-Like Locomotors and Manipulators; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Ma, S. Analysis of snake movement forms for realization of snake-like robots. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 3007–3013. [Google Scholar]
- Chirikjian, G.S.; Burdick, J.W. The kinematics of hyper-redundant robot locomotion. IEEE Trans. Robot. Autom. 1995, 11, 781–793. [Google Scholar] [CrossRef] [Green Version]
- Andersson, S.B. Discretization of a continuous curve. IEEE Trans. Robot. 2008, 24, 456–461. [Google Scholar] [CrossRef]
- Yamada, H.; Hirose, S. Study of Active Cord Mechanism—Approximations to Continuous Curves of a Multi-joint Body. J. Robot. Soc. Jpn. 2008, 26, 110–120. [Google Scholar] [CrossRef]
- Kamegawa, T.; Harada, T.; Gofuku, A. Realization of cylinder climbing locomotion with helical form by a snake robot with passive wheels. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3067–3072. [Google Scholar]
- Fjerdingen, S.A.; Liljebäck, P.; Transeth, A.A. A snake-like robot for internal inspection of complex pipe structures (PIKo). In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5665–5671. [Google Scholar]
- Enner, F.; Rollinson, D.; Choset, H. Motion estimation of snake robots in straight pipes. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5168–5173. [Google Scholar]
- Qi, W.; Kamegawa, T.; Gofuku, A. Helical wave propagation motion for a snake robot on a vertical pipe containing a branch. Artif. Life Robot. 2018, 23, 515–522. [Google Scholar] [CrossRef]
- Takemori, T.; Tanaka, M.; Matsuno, F. Adaptive helical rolling of a snake robot to a straight pipe with irregular cross-sectional shape. IEEE Trans. Robot. 2022, 1–15. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Stavdahl, O.; Marafioti, G.; Transeth, A.A.; Liljeback, P. Virtual functional segmentation of snake robots for perception-driven obstacle-aided locomotion. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1845–1851. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhou, T.; Du, J. Upper-body haptic system for snake robot teleoperation in pipelines. Adv. Eng. Inform. 2022, 51, 101532. [Google Scholar] [CrossRef]
- Takemori, T.; Tanaka, M.; Matsuno, F. Ladder climbing with a snake robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Wang, Y.; Kamegawa, T.; Matsuda, E.; Gofuku, A. Motion planning of a snake robot that moves in crowded pipes. Adv. Robot. 2022, 36, 781–793. [Google Scholar] [CrossRef]
- Hogan, N. Impedance control: An approach to manipulation: Part I—Theory. J. Dyn. Syst. Meas. Control 1985, 107, 1–7. [Google Scholar] [CrossRef]
- Ott, C.; Mukherjee, R.; Nakamura, Y. A hybrid system framework for unified impedance and admittance control. J. Intell. Robot. Syst. 2015, 78, 359–375. [Google Scholar] [CrossRef]
- Fujiki, T.; Tahara, K. Numerical Simulations of A Novel Force Controller Serially Combining The Admittance and Impedance Controllers. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 6955–6962. [Google Scholar]
- Whitman, J.; Ruscelli, F.; Travers, M.; Choset, H. Shape-based compliant control with variable coordination centralization on a snake robot. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 5165–5170. [Google Scholar]
- Wang, Y.; Kamegawa, T.; Gofuku, A. Hybrid Force-position Control Method for a Snake Robot Climbing in Crowded Pipes. In Proceedings of the 2022 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics, Online, 25–27 January 2022; pp. 1756–1761. [Google Scholar]
- Rao, A.Z. Realization of Dynamixel Servo Plant Parameters to Improve Admittance Control for a Compliant Human-Robot Interaction. Master’s Thesis, New Jersey Institute of Technology, Newark, NJ, USA, 2016. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Desired output torque | M | Inertia matrix for impedance control | |
| B | Damping matrix for impedance control | K | Stiffness matrix for impedance control |
| Nominal output torque | Final system output torque | ||
| P | Present angle | Present angular velocity | |
| Present angle acceleration | r | Impedance/admittance ratio factor | |
| Desired output angle | Desired output angle velocity | ||
| Desired output acceleration | Inertia matrix for impedance control | ||
| Damping matrix for impedance control | Stiffness matrix for impedance control | ||
| Nominal output angle | Final system output angle | ||
| Total torque | External torque | ||
| Friction torque |
| n | 12 | ||
| L | |||
| m | |||
| p | 10 | ||
| M | |||
| B | |||
| K | |||
| I | G | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Kamegawa, T. Realization of Crowded Pipes Climbing Locomotion of Snake Robot Using Hybrid Force–Position Control Method. Sensors 2022, 22, 9016. https://doi.org/10.3390/s22229016
Wang Y, Kamegawa T. Realization of Crowded Pipes Climbing Locomotion of Snake Robot Using Hybrid Force–Position Control Method. Sensors. 2022; 22(22):9016. https://doi.org/10.3390/s22229016
Chicago/Turabian StyleWang, Yongdong, and Tetsushi Kamegawa. 2022. "Realization of Crowded Pipes Climbing Locomotion of Snake Robot Using Hybrid Force–Position Control Method" Sensors 22, no. 22: 9016. https://doi.org/10.3390/s22229016