
Acoustic and Thermal Characterization of Therapeutic Ultrasonic Langevin Transducers under Continuous- and Pulsed Wave Excitations

Abstract
:1. Introduction
2. Materials and Methods
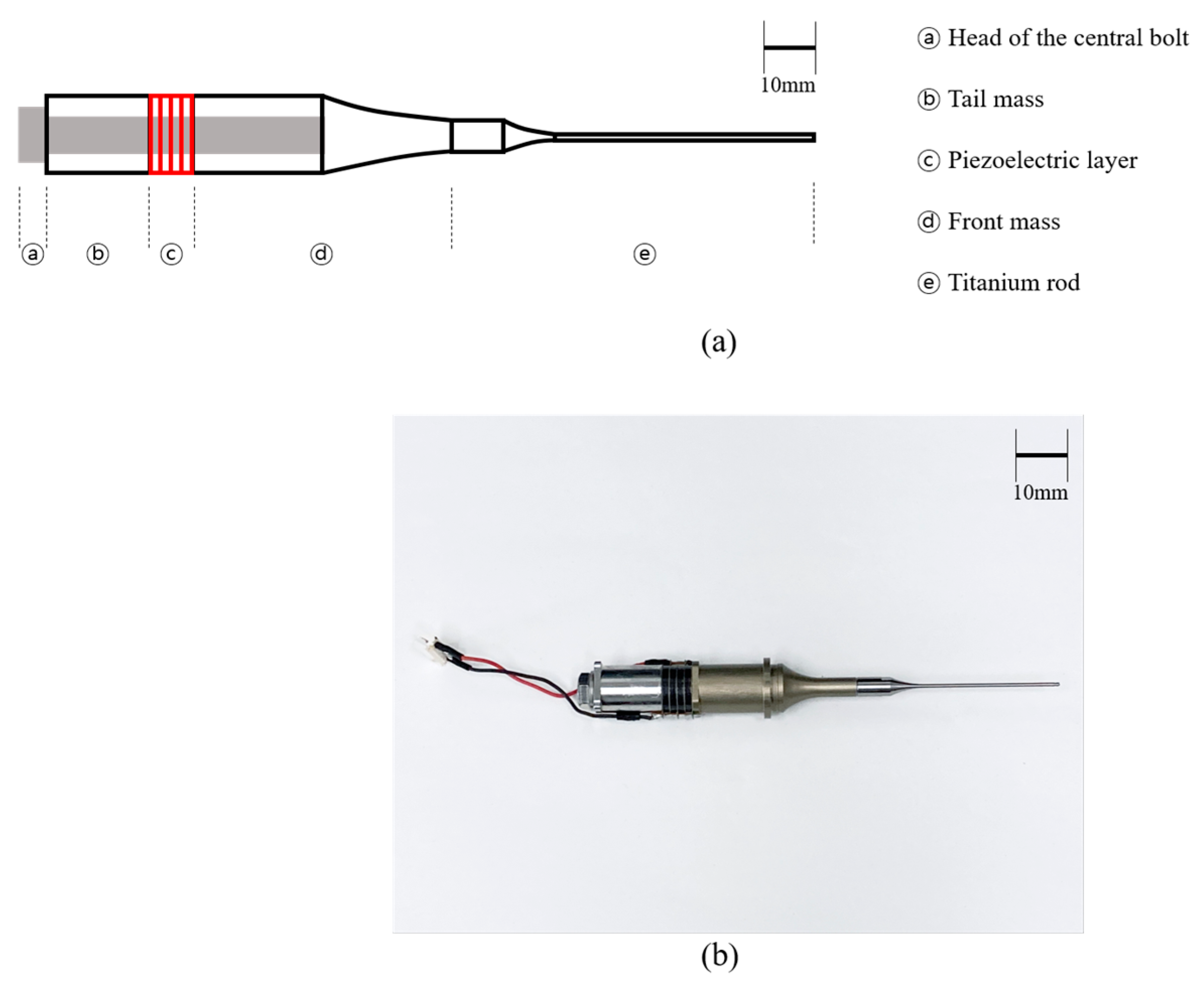
2.1. Fabrication of Therapeutic Langevin Transducer
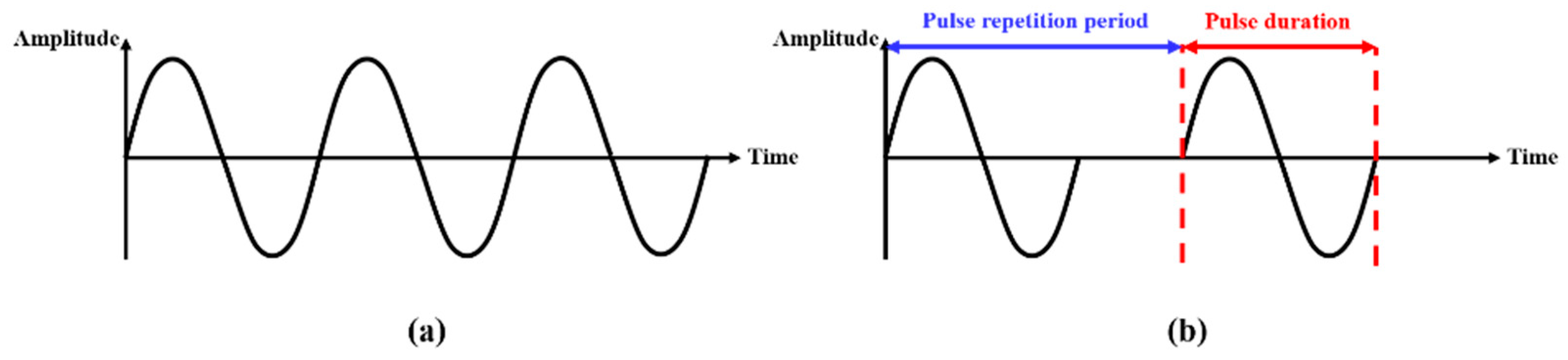
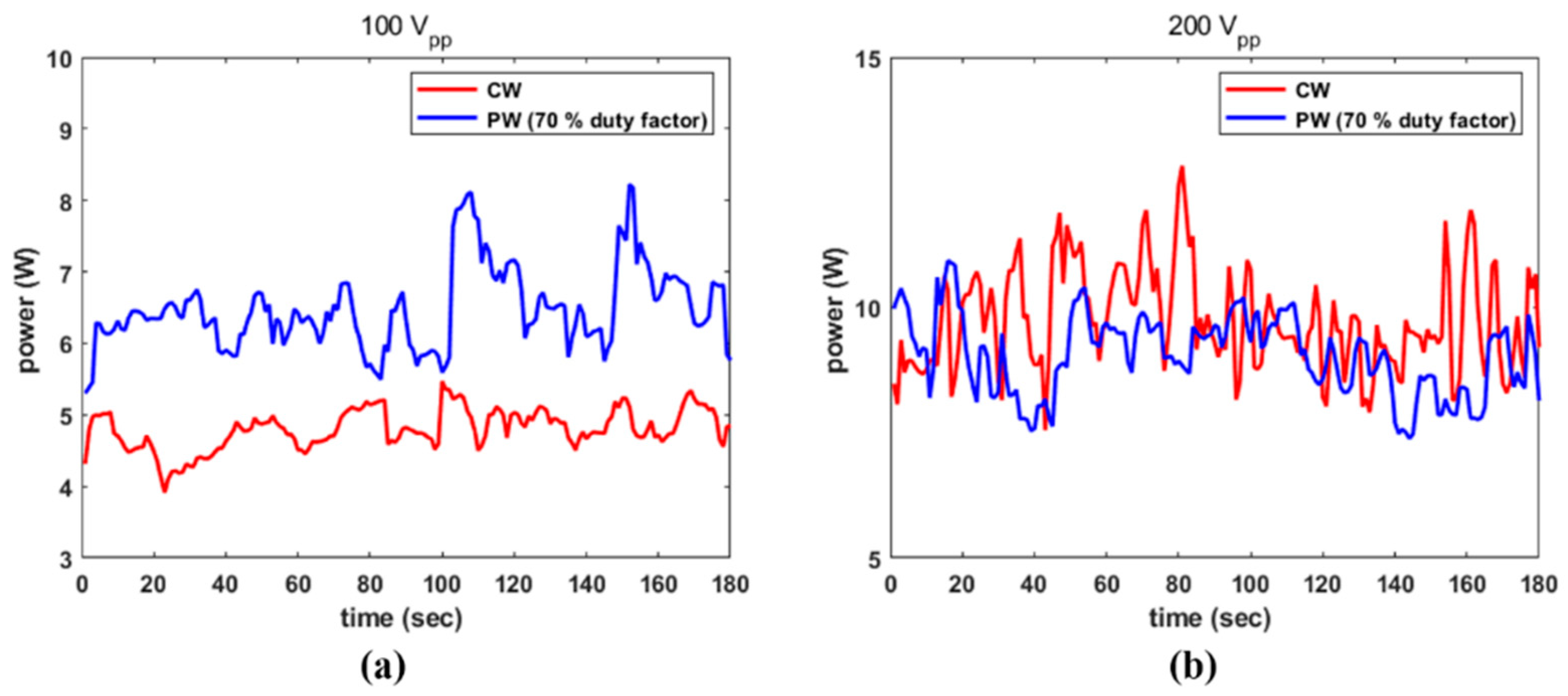
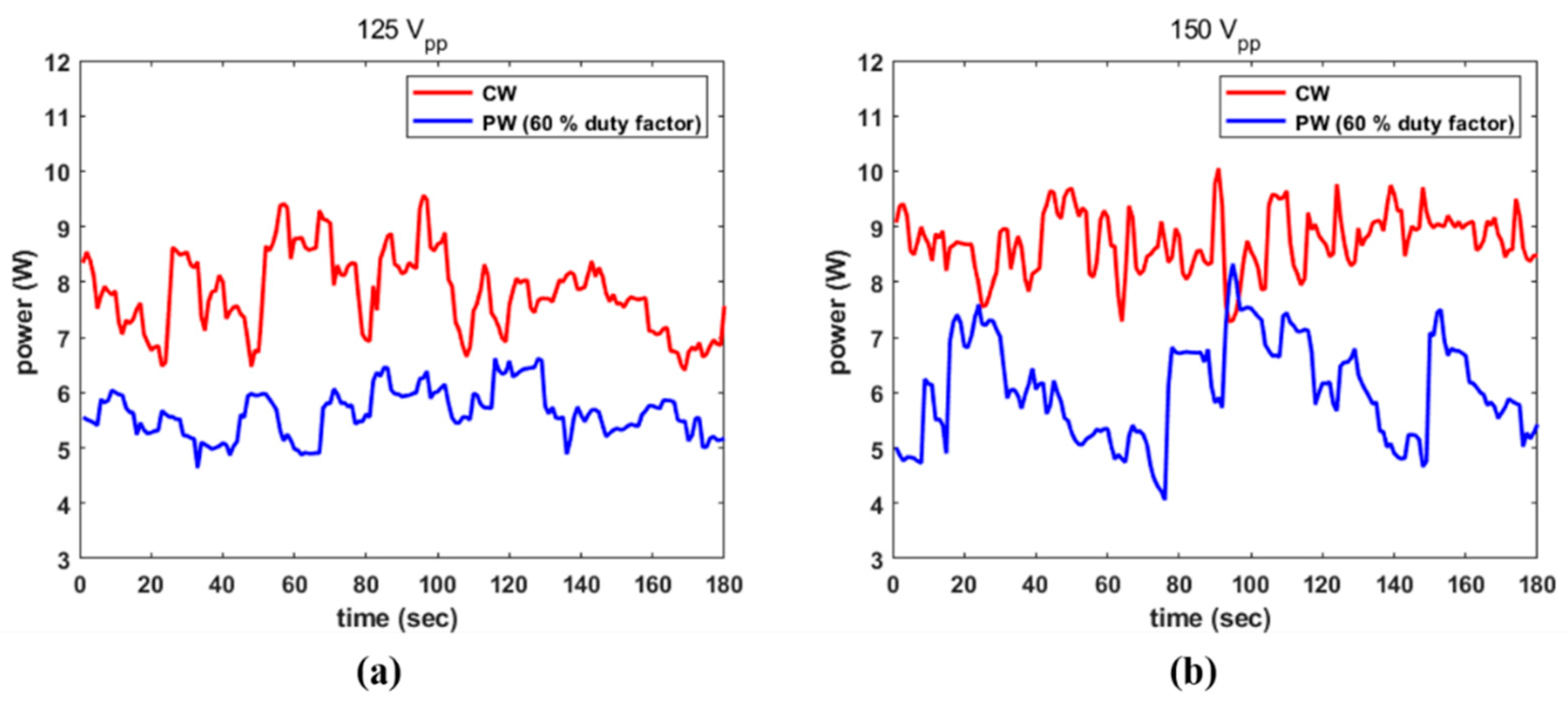
2.2. Continuous vs. Pulsed Waves
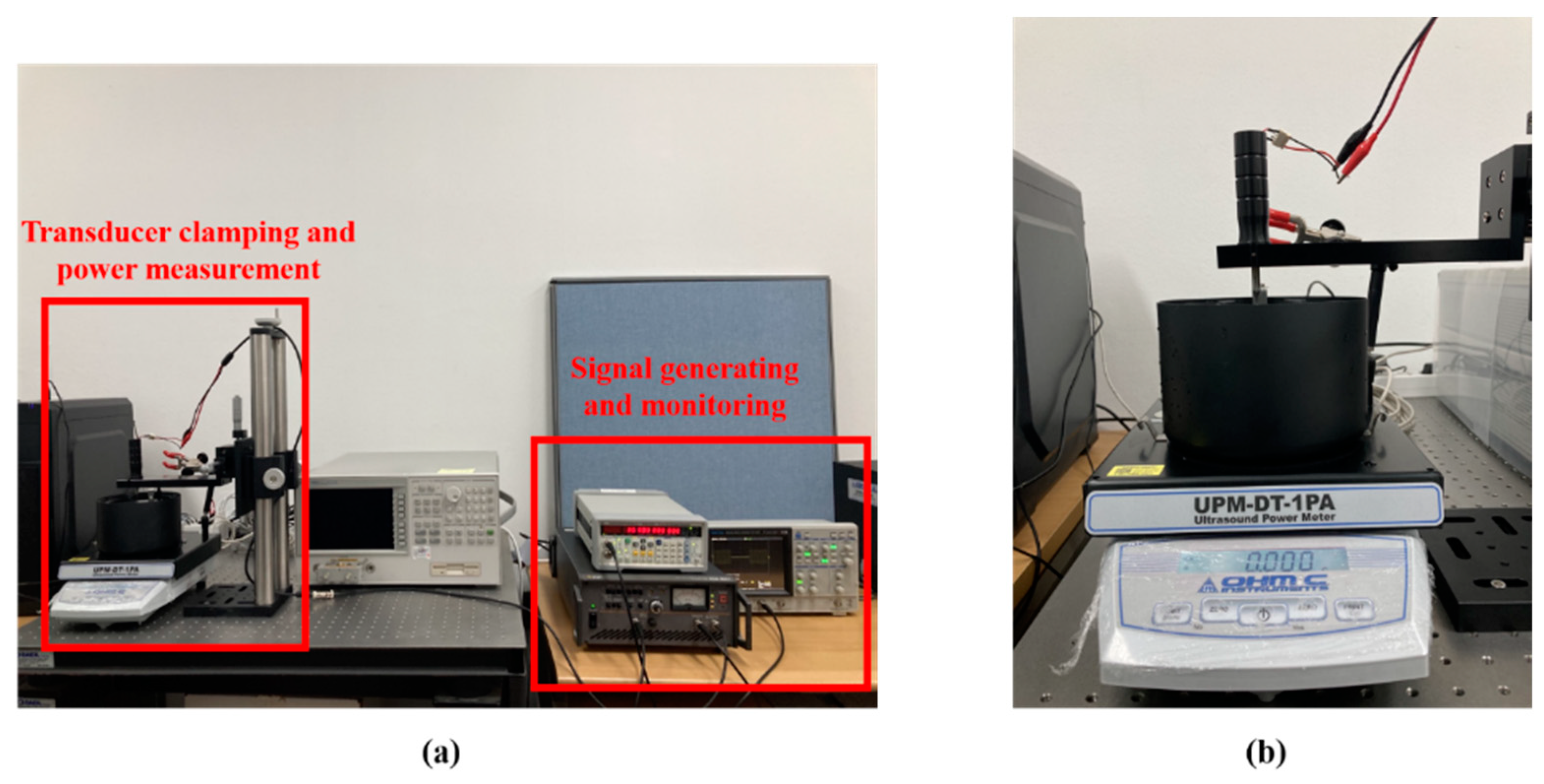
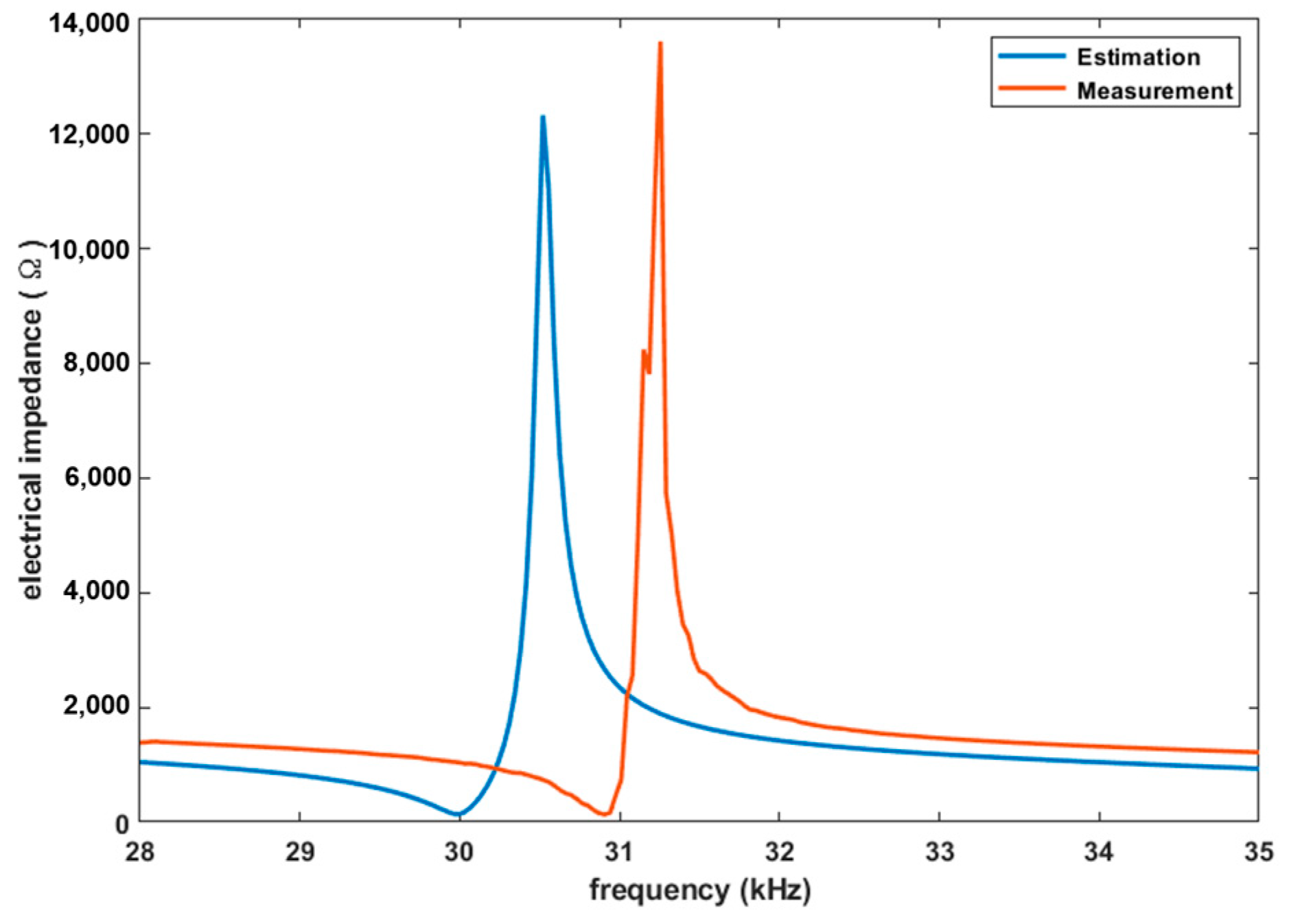
2.3. Electro-Acoustic Conversion Efficiency
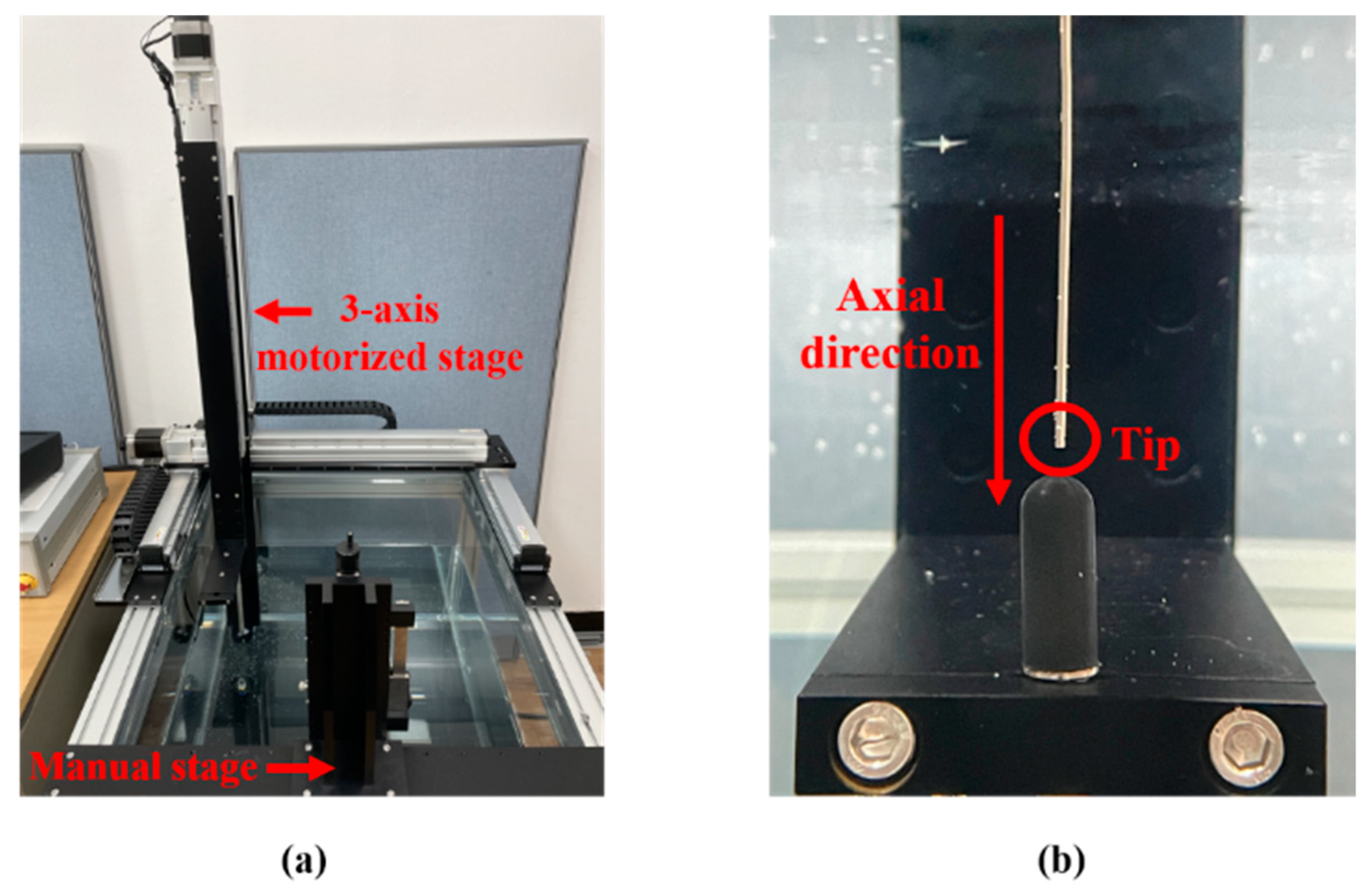
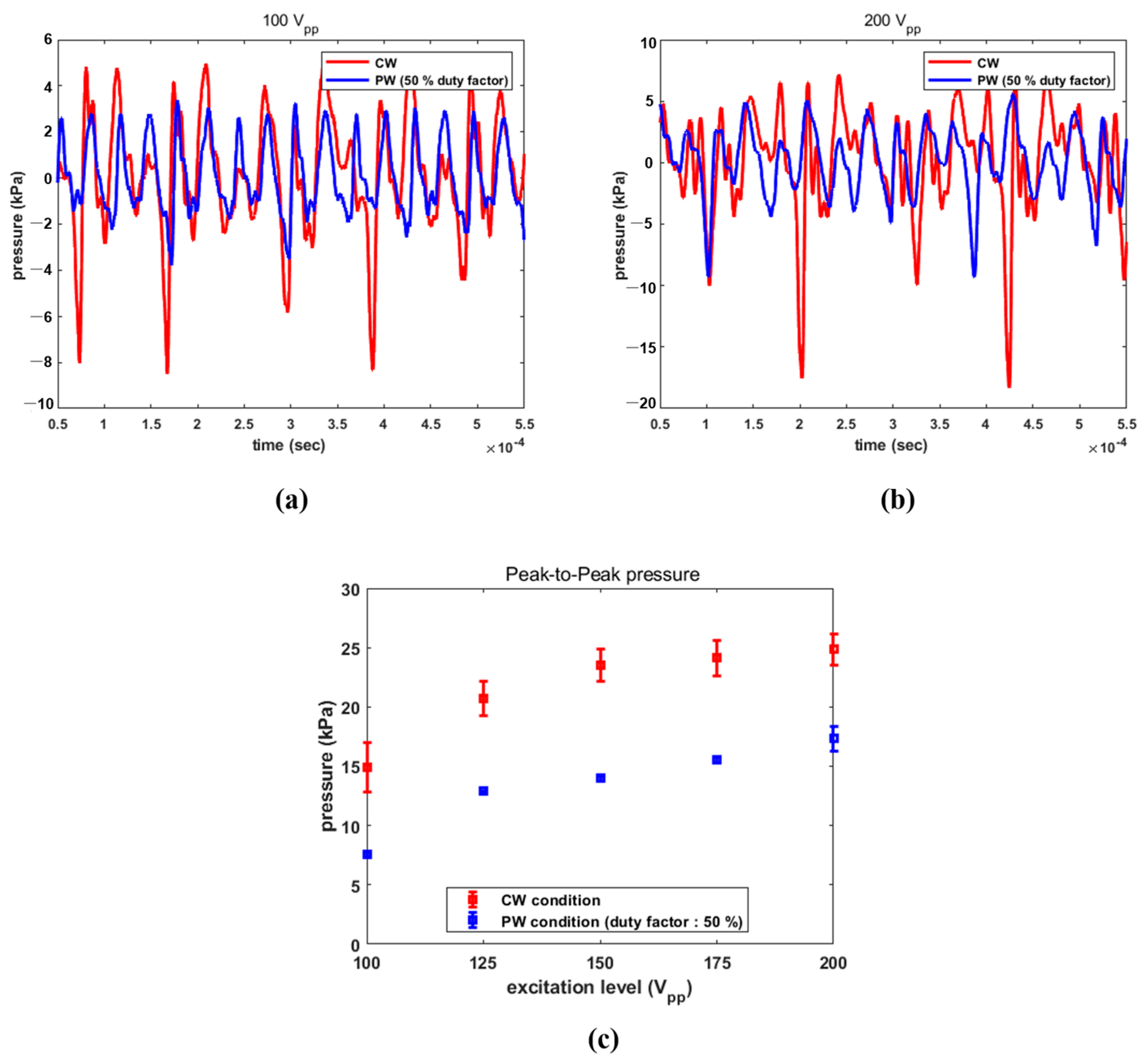
2.4. Characterization of Acoustic Output
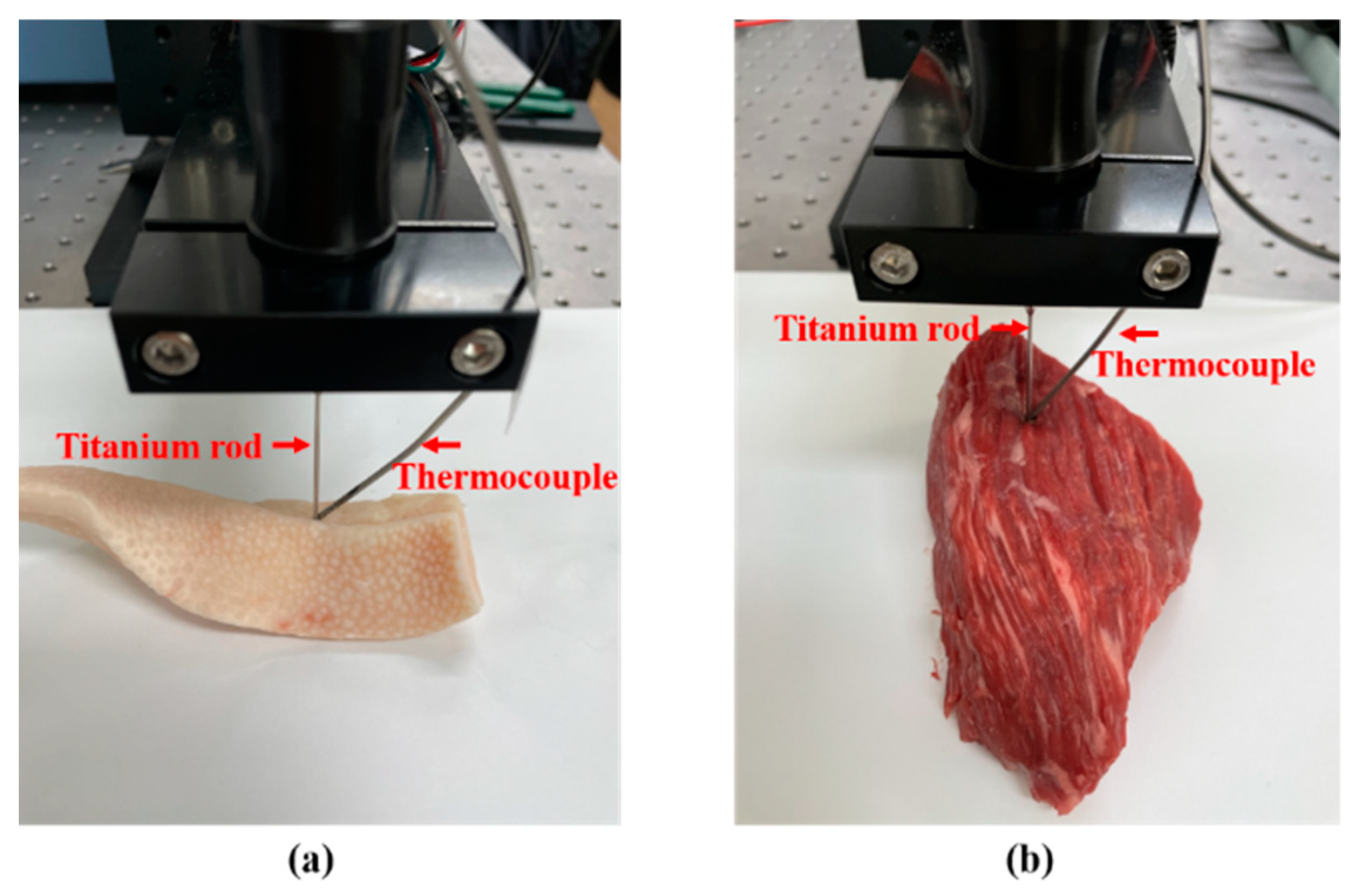
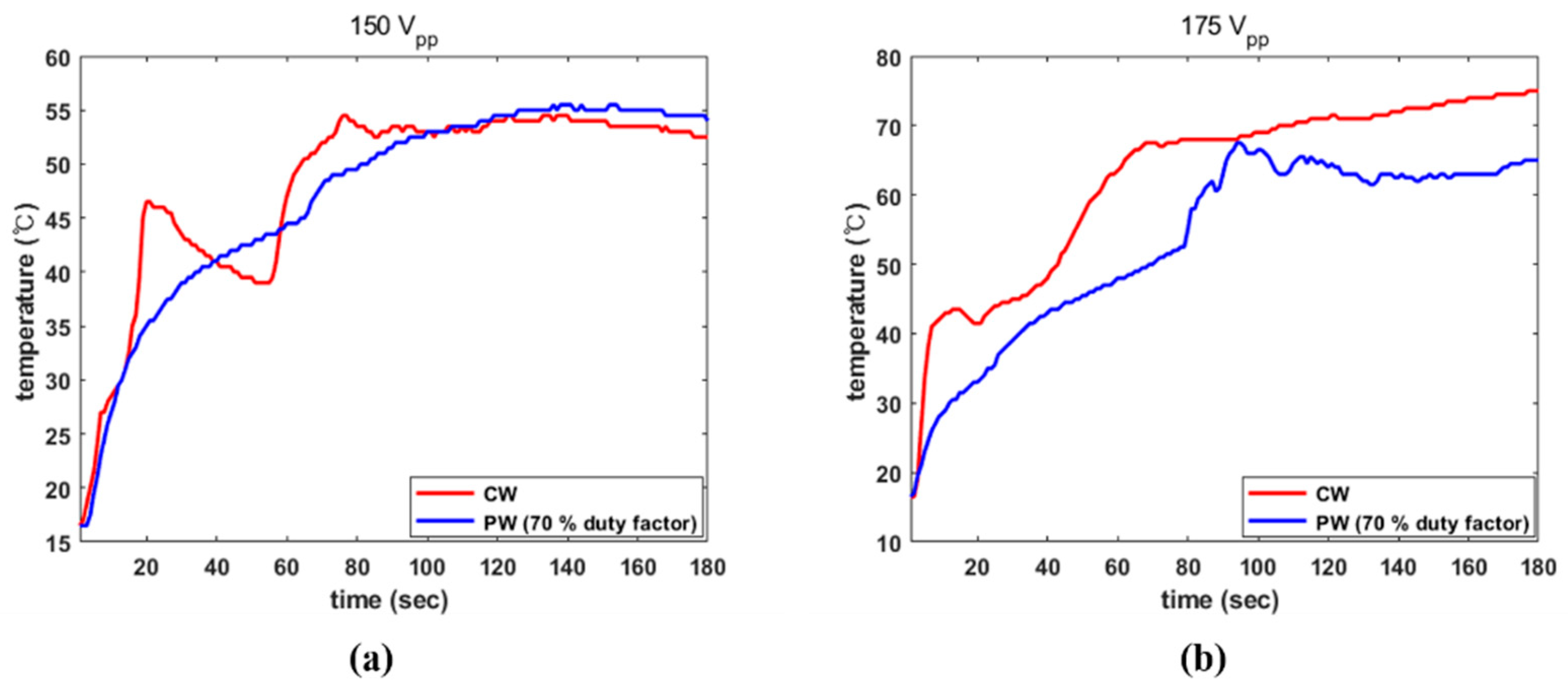
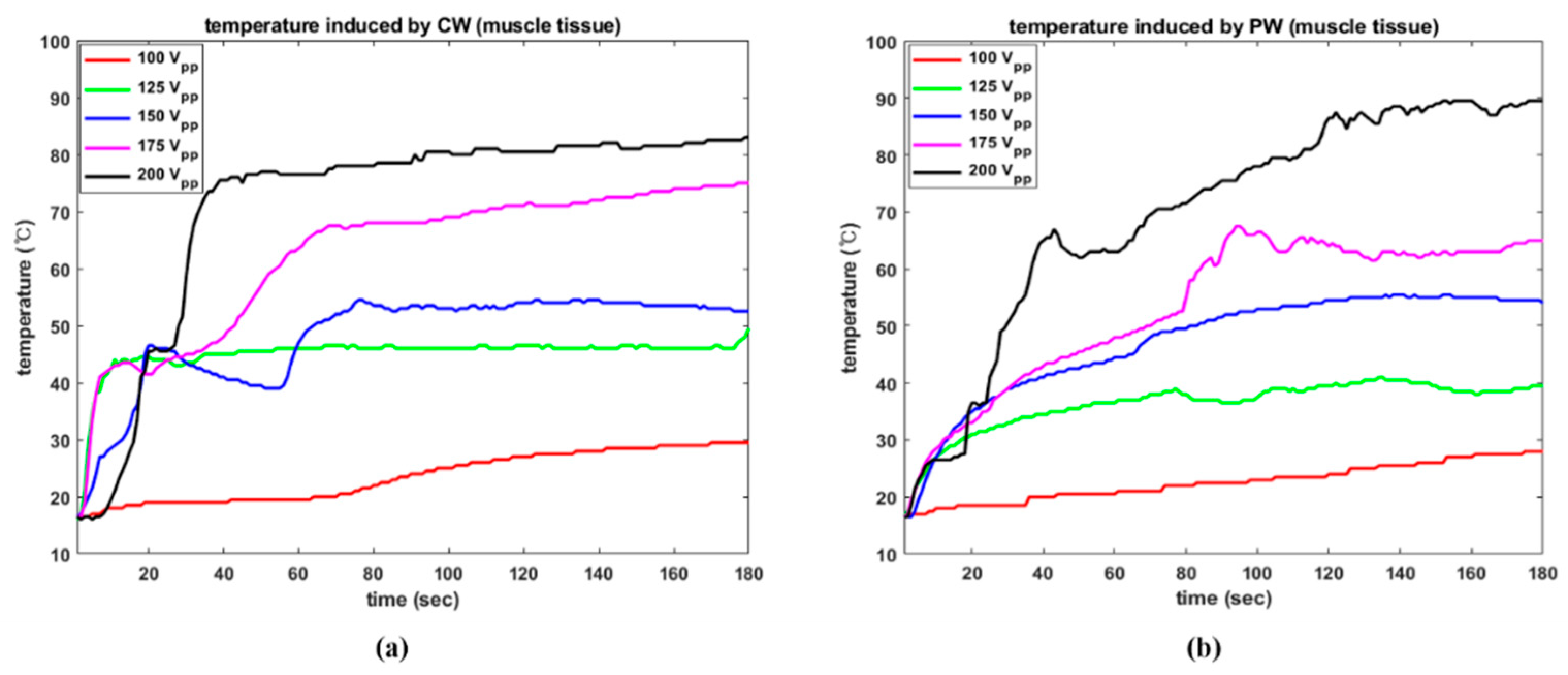
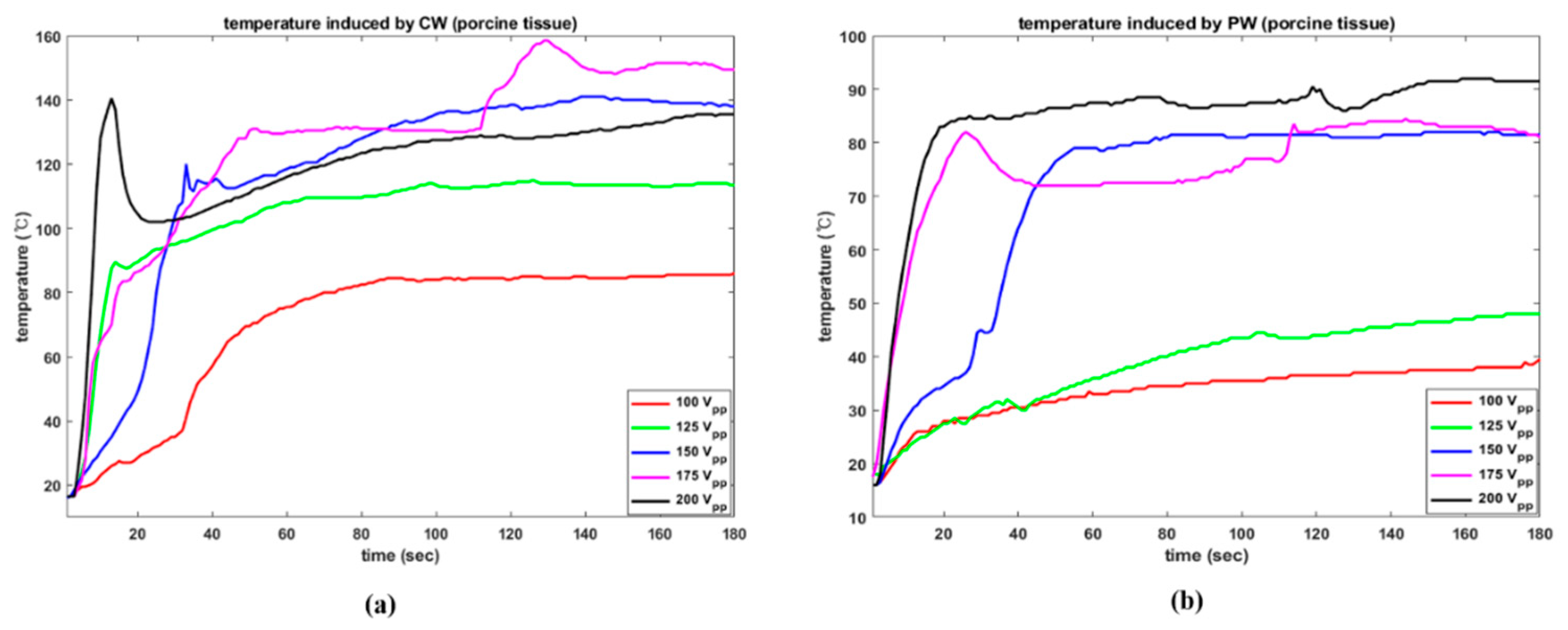
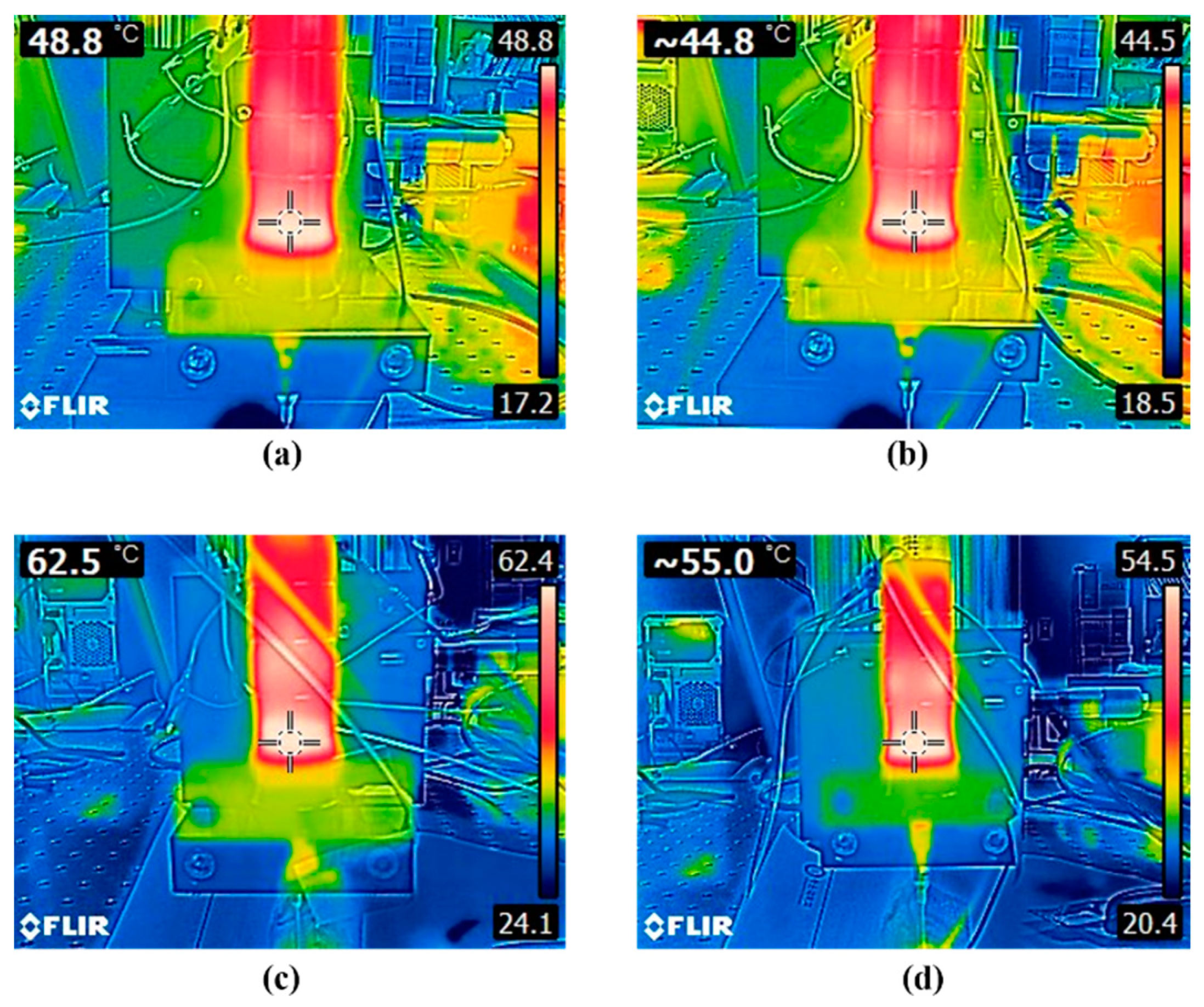
2.5. Examination of Thermal Effect on a Biological Specimen
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Pérez-Sánchez, A.; Segura, J.; Rubio-Gonzalez, C.; Baldenegro-Pérez, L.A.; Soto-Cajiga, J. Numerical design and analysis of a langevin power ultrasonic transducer for acoustic cavitation generation. Sens. Actuators A Phys. 2020, 311, 112035. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Li, J.; Yang, Y.; Wang, S. Piezoelectric transducer design for an ultrasonic scalpel with enhanced dexterity for minimally invasive surgical robots. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 234, 1271–1285. [Google Scholar] [CrossRef]
- Li, X.; Stritch, T.; Lucas, M. Design of Miniature Ultrasonic Surgical Devices. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 2641–2644. [Google Scholar] [CrossRef] [Green Version]
- Schafer, M. Ultrasonic surgical devices and procedures. In Power Ultrasonics: Applications of High-Intensity Ultrasound; Elsevier Ltd.: Amsterdam, The Netherlands, 2015; pp. 633–660. [Google Scholar] [CrossRef]
- Lin, J.; Lin, S. Study on a Large-Scale Three-Dimensional Ultrasonic Plastic Welding Vibration System Based on a Quasi-Periodic Phononic Crystal Structure. Crystals 2020, 10, 21. [Google Scholar] [CrossRef] [Green Version]
- Lais, H.; Lowe, P.S.; Kanfoud, J.; Gan, T.-H. Application of high power ultrasonics for fouling removal in submerged structures. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Widiyastuti, W.; Machmudah, S.; Kusdianto; Nurtono, T.; Winardi, S. Characteristics of ZnO nanostructures synthesized by sonochemical reaction: Effects of continuous and pulse waves. AIP Conf. Proc. 2015, 1699, 040001. [Google Scholar] [CrossRef]
- Sun, Y.; Ye, X. Enhancement or Reduction of Sonochemical Activity of Pulsed Ultrasound Compared to Continuous Ultrasound at 20 kHz? Molecules 2013, 18, 4858–4867. [Google Scholar] [CrossRef] [Green Version]
- Dezhkunov, N.; Francescutto, A.; Ciuti, P.; Mason, T.; Iernetti, G.; Kulak, A. Enhancement of sonoluminescence emission from a multibubble cavitation zone. Ultrason. Sonochemistry 1999, 7, 19–24. [Google Scholar] [CrossRef]
- Chen, C.; Fan, C.; Cai, X.; Liu, Z.; Lin, S.; Yang, C. Arc characteristics and weld appearance in pulsed ultrasonic assisted GTAW process. Results Phys. 2019, 15, 102692. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Theoretical Resonance Analysis of Langevin Transducers with Equivalent Circuit Models for Therapeutic Ultrasound. J. Electr. Eng. Technol. 2019, 14, 2437–2445. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models. Sensors 2020, 20, 1952. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Kim, J. Theoretical and Empirical Verification of Electrical Impedance Matching Method for High-Power Transducers. Electronics 2022, 11, 194. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Acoustic Power Measurement and Thermal Bioeffect Evaluation of Therapeutic Langevin Transducers. Sensors 2022, 22, 624. [Google Scholar] [CrossRef]
- Kenny, J.S.; Munding, C.E.; Eibl, J.K.; Eibl, A.M.; Long, B.F.; Boyes, A.; Yin, J.; Verrecchia, P.; Parrotta, M.; Gatzke, R.; et al. A novel, hands-free ultrasound patch for continuous monitoring of quantitative Doppler in the carotid artery. Sci. Rep. 2021, 11, 7780. [Google Scholar] [CrossRef]
- Christopher, D.; Burns, P.; Armstrong, J.; Foster, F. A high frequency continuous-wave Doppler ultrasound system for detection of blood flow in the microcirculation. Ultrasound Med. Biol. 1996, 22, 1191–1203. [Google Scholar] [CrossRef]
- Alvarez, N.P.; Cardoni, A.; Cerisola, N.; Riera, E.; Andrade, M.A.B.; Adamowski, J.C. Nonlinear Dynamic Modeling of Langevin-Type Piezoelectric Transducers. Actuators 2015, 4, 255–266. [Google Scholar] [CrossRef] [Green Version]
- Shin, E.-J.; Kang, B.; Chang, J.H. Real-Time HIFU Treatment Monitoring Using Pulse Inversion Ultrasonic Imaging. Appl. Sci. 2018, 8, 2219. [Google Scholar] [CrossRef] [Green Version]
- Saillant, J.-F.; Marlier, R.; Navacchia, F.; Baqué, F. Ultrasonic Transducer for Non-Destructive Testing of Structures Immersed in Liquid Sodium at 200 °C. Sensors 2019, 19, 4156. [Google Scholar] [CrossRef] [Green Version]
- Makino, H.; Kamiya, N. Electromechanical Fatigue of Lead Zirconate Titanate Ceramics. Jpn. J. Appl. Phys. 1998, 37, 5301–5305. [Google Scholar] [CrossRef]
- Hundt, W.; Yuh, E.L.; Steinbach, S.; Bednarski, M.D.; Guccione, S. Comparison of continuous vs. pulsed focused ultrasound in treated muscle tissue as evaluated by magnetic resonance imaging, histological analysis, and microarray analysis. Eur. Radiol. 2008, 18, 993–1004. [Google Scholar] [CrossRef]
- Hanawa, K.; Ito, K.; Aizawa, K.; Shindo, T.; Nishimiya, K.; Hasebe, Y.; Tuburaya, R.; Hasegawa, H.; Yasuda, S.; Kanai, H.; et al. Low-Intensity Pulsed Ultrasound Induces Angiogenesis and Ameliorates Left Ventricular Dysfunction in a Porcine Model of Chronic Myocardial Ischemia. PLoS ONE 2014, 9, e104863. [Google Scholar] [CrossRef] [Green Version]
- Mizrahi, N.; Seliktar, D.; Kimmel, E. Ultrasound-Induced Angiogenic Response in Endothelial Cells. Ultrasound Med. Biol. 2007, 33, 1818–1829. [Google Scholar] [CrossRef]
- Barzelai, S.; Sharabani-Yosef, O.; Holbova, R.; Castel, D.; Walden, R.; Engelberg, S.; Scheinowitz, M. Low-intensity ultrasound induces angiogenesis in rat hind-limb ischemia. Ultrasound Med. Biol. 2006, 32, 139–145. [Google Scholar] [CrossRef]
- Merritt, C.R.B.; Kremkau, F.W.; Hobbins, J.C. Diagnostic ultrasound: Bioeffects and safety. Ultrasound Obstet. Gynecol. 1992, 2, 366–374. [Google Scholar] [CrossRef]
- Li, F.; Chen, C.; Li, W.; Zeng, D. The electro-acoustic output behavior and thermal stability of 1–3 piezoelectric composite transducers applied to FUS surgery. J. Mater. Sci. Mater. Electron. 2020, 31, 12066–12073. [Google Scholar] [CrossRef]
- Al-Bataineh, O.; Jenne, J.; Huber, P. Clinical and future applications of high intensity focused ultrasound in cancer. Cancer Treat. Rev. 2012, 38, 346–353. [Google Scholar] [CrossRef]
- van den Bijgaart, R.J.; Eikelenboom, D.C.; Hoogenboom, M.; Fütterer, J.J.; den Brok, M.H.; Adema, G.J. Thermal and mechanical high-intensity focused ultrasound: Perspective on tumor ablation, immune effects and combination strategies. Cancer Immunol. Immunother. 2017, 66, 247–258. [Google Scholar] [CrossRef] [Green Version]
- Napoli, A.; Anzidei, M.; Ciolina, F.; Marotta, E.; Marincola, B.C.; Brachetti, G.; Di Mare, L.; Cartocci, G.; Boni, F.; Noce, V.; et al. MR-Guided High-Intensity Focused Ultrasound: Current Status of an Emerging Technology. Cardiovasc. Interv. Radiol. 2013, 36, 1190–1203. [Google Scholar] [CrossRef]
- Solovchuk, M.A.; Hwang, S.C.; Chang, H.; Thiriet, M.; Sheu, T.W.H. Temperature elevation by HIFU in ex vivo porcine muscle: MRI measurement and simulation study. Med. Phys. 2014, 41, 052903. [Google Scholar] [CrossRef]
- Eick, O.J. Temperature Controlled Radiofrequency Ablation. Indian Pacing Electrophysiol. J. 2002, 2, 66–73. [Google Scholar] [CrossRef]
- Tauchi, H.; Imashiro, C.; Kuribara, T.; Fujii, G.; Kurashina, Y.; Totani, K.; Takemura, K. Effective and Intact Cell Detachment from a Clinically Ubiquitous Culture Flask by Combining Ultrasonic Wave Exposure and Diluted Trypsin. Biotechnol. Bioprocess Eng. 2019, 24, 536–543. [Google Scholar] [CrossRef]
- Kuriyama, T.; Fukuma, Y.; Imashiro, C.; Kabayama, K.; Kurashina, Y.; Takemura, K. Detachment of RAW264.7 macrophages from a culture dish using ultrasound excited by a Langevin transducer. J. Biosci. Bioeng. 2021, 131, 320–325. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Material 3 | Sound Speed (m/s) | Density (kg/m3) | Acoustic Impedance (MRayls) | Axial Length (mm) | Inner Diameter (mm) | Outer Diameter (mm) |
|---|---|---|---|---|---|---|---|
| Central bolt | Stainless steel | 5920 | 8000 | 47 | 55 | - | 6.5 |
| Tail mass | Stainless steel | 5920 | 8000 | 47 | 20 | 6.5 | 15 |
| Piezoelectric element | Hard ceramic | 2791 | 7700 | 21 | 8 | 6.5 | 15 |
| Front mass | Aluminum | 6375 | 2700 | 17 | 50 | 6.5 | 15 1 |
| Auxiliary rod | Titanium | 4987 | 4430 | 22 | 60 | - | 6 2 |
| Amplitude (VPP) 1 | 100 | 125 | 150 | 175 | 200 | |
|---|---|---|---|---|---|---|
| Duty Factor (%) 2 | ||||||
| 50 | 2.40 W/12.55% | 4.14 W/13.86% | 5.51 W/12.81% | 6.24 W/10.66% | 6.90 W/9.02% | |
| 60 | 3.26 W/14.21% | 5.63 W/15.71% | 6.07 W/11.76% | 8.36 W/11.90% | 8.97 W/9.77% | |
| 70 | 6.46 W/24.13% | 7.71 W/18.43% | 8.17 W/13.56% | 8.90 W/10.86% | 9.03 W/8.43% | |
| 80 | 6.28 W/20.53% | 7.83 W/16.38% | 8.58 W/12.46% | 8.87 W/9.50% | 9.71 W/7.93% | |
| 90 | 6.33 W/18.39% | 7.84 W/14.58% | 8.58 W/11.08% | 8.90 W/8.44% | 9.82 W/7.13% | |
| CW | 4.80 W/12.55% | 7.81 W/13.07% | 8.74 W/10.16% | 8.95 W/7.64% | 9.73 W/6.36% | |
| CW | 100 VPP | 125 VPP | 150 VPP | 175 VPP | 200 VPP |
|---|---|---|---|---|---|
| Bovine muscle | 34.2 °C | 34.5 °C | 43.2 °C | 48.8 °C | 51.3 °C |
| Porcine tissue | 34.8 °C | 34.9 °C | 42.7 °C | 50.4 °C | 62.5 °C |
| PW (70% duty factor) | 100 VPP | 125 VPP | 150 VPP | 175 VPP | 200 VPP |
| Bovine muscle | 32.8 °C | 33.8 °C | 39.5 °C | 44.8 °C | 50.4 °C |
| Porcine tissue | 33.3 °C | 33.9 °C | 35.1 °C | 44.9 °C | 55.0 °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Lee, J. Acoustic and Thermal Characterization of Therapeutic Ultrasonic Langevin Transducers under Continuous- and Pulsed Wave Excitations. Sensors 2022, 22, 9006. https://doi.org/10.3390/s22229006
Kim J, Lee J. Acoustic and Thermal Characterization of Therapeutic Ultrasonic Langevin Transducers under Continuous- and Pulsed Wave Excitations. Sensors. 2022; 22(22):9006. https://doi.org/10.3390/s22229006
Chicago/Turabian StyleKim, Jinhyuk, and Jungwoo Lee. 2022. "Acoustic and Thermal Characterization of Therapeutic Ultrasonic Langevin Transducers under Continuous- and Pulsed Wave Excitations" Sensors 22, no. 22: 9006. https://doi.org/10.3390/s22229006