
Elastomeric Core/Conductive Sheath Fibers for Tensile and Torsional Strain Sensors
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
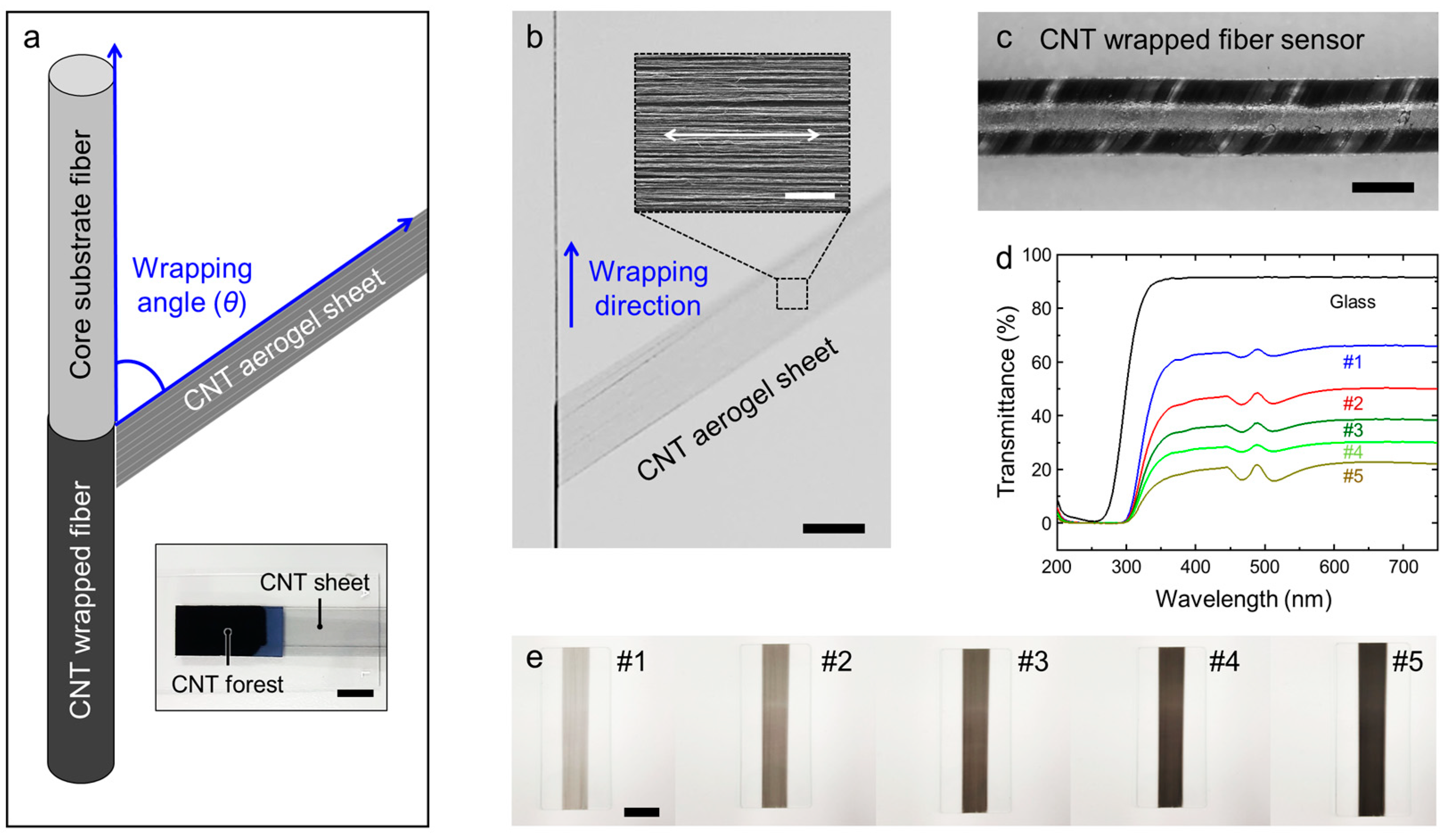
2.1. Fabrication of the CNT-Wrapped Core/Sheath Fiber Strain Sensors
2.2. Experimental Setup for Resistance Measurement and Morphology of the CNT-Wrapped Core/Sheath Fiber Strain Sensor
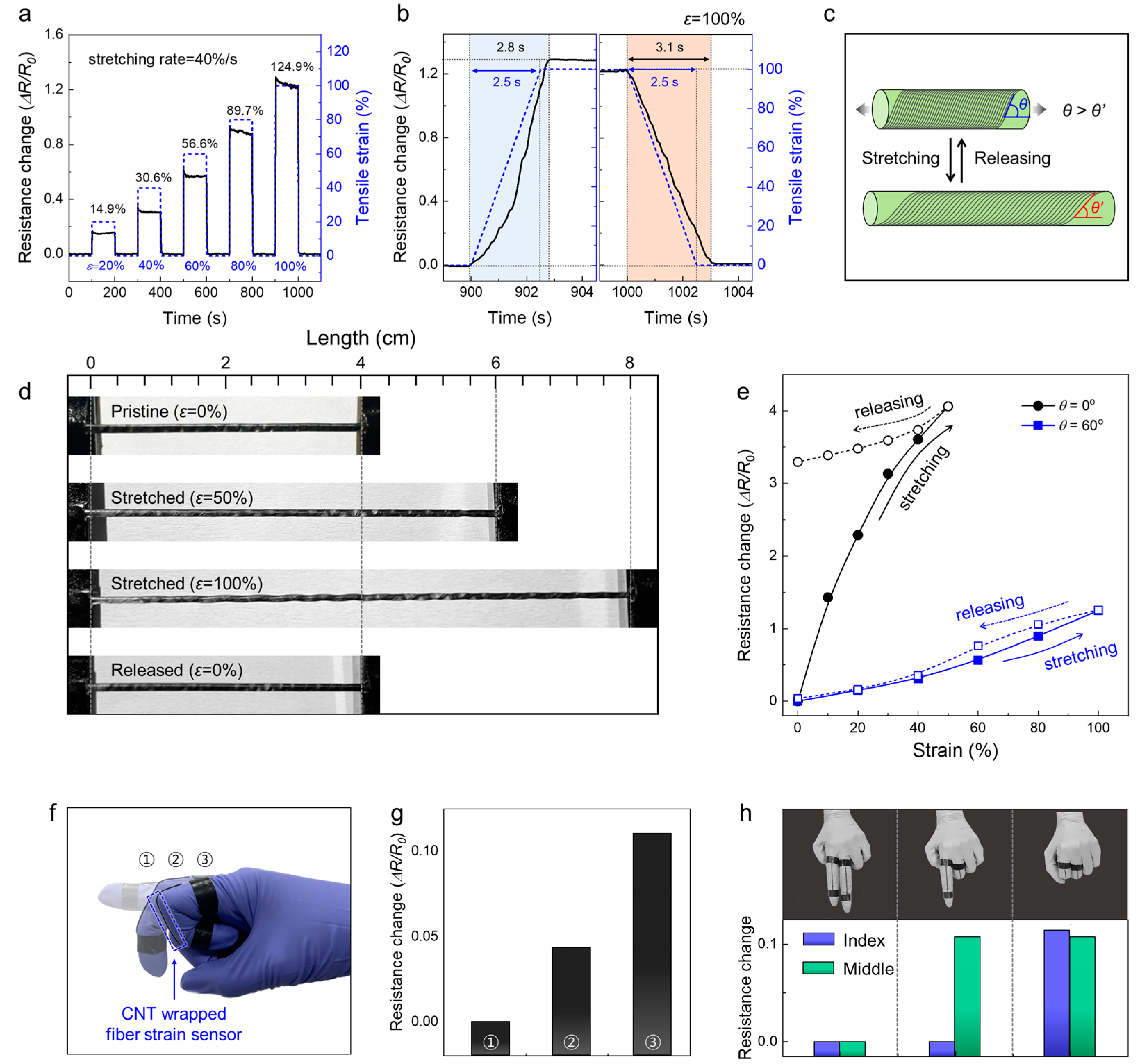
2.3. Electrical and Morphological Changes of the CNT-Wrapped Core/Sheath Fiber Tensile Strain Sensors
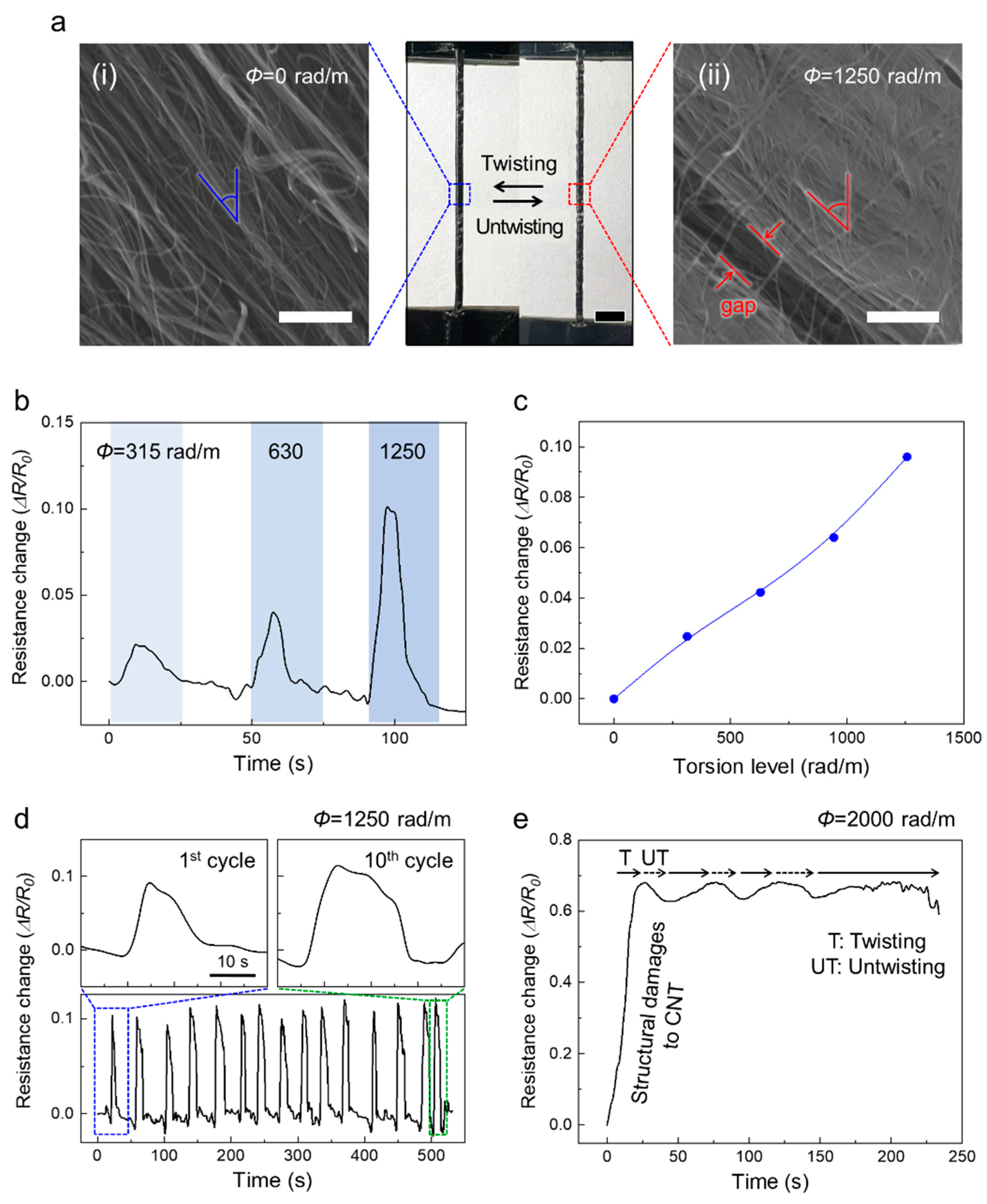
2.4. Electrical and Morphological Changes of the CNT-Wrapped Core/Sheath Fiber Torsional Strain Sensors
2.5. Deformation Sensing Mechanism of the CNT-Wrapped Core/Sheath Fiber Strain Sensors
3. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A Stretchable Carbon Nanotube Strain Sensor for Human-Motion Detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Yoon, K.; Lee, S.; Lee, H.J.; Lee, J.; Kim, D.W.; Kim, M.-S.; Lee, T.; Pang, C. Conductive Hierarchical Hairy Fibers for Highly Sensitive, Stretchable, and Water-Resistant Multimodal Gestrue-Distinguishable Sensor, VR Applications. Adv. Funct. Mater. 2019, 29, 1905808. [Google Scholar] [CrossRef]
- Boland, C.S.; Khan, U.; Backes, C.; O’Neill, A.; McCauley, J.; Duane, S.; Shanker, R.; Liu, Y.; Jurewicz, I.; Dalton, A.B.; et al. Sensitive, High-Strain, High-Rate Bodily Motion Sensors Based on Graphene-Rubber Composite. ACS Nano 2014, 8, 8819–8830. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Wang, R.; Sun, J.; Gao, L. A Stretchable and Highly Sensitive Graphene-Based Fiber for Sensing Tensile Strain, Bending, and Torsion. Adv. Mater. 2015, 27, 7365–7371. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Wei, Y.; Wei, S.; Lin, Y.; Liu, L. Ultrasensitive Cracking-Assisted Strain Sensors Based on Silver Nanowires/Graphene Hybrid Particles. ACS Appl. Mater. Interfaces 2016, 8, 25563–25570. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and Highly Sensitive Graphene Strain Sensors for Human Motion Monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Ryu, S.; Lee, P.; Chou, J.B.; Xu, R.; Zhao, R.; Hart, A.J.; Kim, S.-G. Extremely Elastic Wearable Carbon Nanotube Fiber Strain Sensor for Monitoring of Human Motion. ACS Nano 2015, 9, 5929–5936. [Google Scholar]
- Li, Y.-Q.; Huang, P.; Zhu, W.-B.; Fu, S.-Y.; Hu, N.; Liao, K. Flexible Wire-Shaped Strain Sensor from Cotton Thread for Human Health and Motion Detection. Sci. Rep. 2017, 7, 45013. [Google Scholar] [CrossRef] [Green Version]
- Wen, D.-L.; Liu, X.; Deng, H.-T.; Sun, D.-H.; Qian, H.-Y.; Brugger, J.; Zhang, X.-S. Printed Silk-Fibroin-Based Triboelectric Nanogenerators for Multi-Functional Wearable Sensing. Nano Energy 2019, 66, 104123. [Google Scholar] [CrossRef]
- He, Z.; Zhou, G.; Byun, J.-H.; Lee, S.-K.; Um, M.-K.; Park, B.; Kim, T.; Lee, S.B.; Chou, T.-W. Highly Stretchable Multi-Walled Carbon Nanotube/Thermoplastic Polyurethane Composite Fibers for Ultrasensitive, Wearable Strain Sensors. Nanoscale 2019, 11, 5884–5890. [Google Scholar] [CrossRef]
- Huang, Q.; Jiang, Y.; Duan, Z.; Yuan, Z.; Liu, Z.; Liu, B.; Zhao, Q.; Zhang, Y.; Sun, Y.; Sun, P.; et al. Faciley Constructed Randomly Distributed Surface Microstructure for Flexible Strain Sensor with High Sensitivity and Low Detection Limit. J. Phys. D Appl. Phys. 2021, 54, 284003. [Google Scholar] [CrossRef]
- Cherenack, K.; Zysset, C.; Kinkeldei, T.; Münzenrieder, N.; Tröster, G. Woven Electronic Fibers with Sensing and Display Functions for Smart Textiles. Adv. Mater. 2010, 22, 5178–5182. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Kwon, H.; Seo, J.; Shin, S.; Koo, J.H.; Pang, C.; Son, S.; Kim, J.H.; Jang, Y.H.; Kim, D.E.; et al. Conductive Fiber-Based Ultrasensitive Textile Pressure Sensor for Wearable Electronics. Adv. Mater. 2015, 27, 2433–2439. [Google Scholar] [CrossRef]
- Frutiger, A.; Muth, J.T.; Vogt, D.M.; Mengüç, Y.; Campo, A.; Valentine, A.D.; Walsh, C.J.; Lewis, J.A. Capacitive Soft Strain Sensors via Multicore-Shell Fiber Printing. Adv. Mater. 2015, 27, 2440–2446. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Hua, T.; Xu, B. Electromechanical Properties of a Yarn Strain Sensor with Graphene-Sheath/Polyurethane-Core. Carbon 2017, 118, 686–698. [Google Scholar] [CrossRef]
- Jang, S.; Kim, J.; Kim, D.W.; Kim, J.W.; Chun, S.; Lee, H.J.; Yi, G.-R.; Pang, C. Carbon-Based, Ultraelastic, Hierarchically Coated Fiber Strain Sensors with Crack-Controllable Beads. ACS Appl. Mater. Interfaces 2019, 11, 15079–15087. [Google Scholar] [CrossRef]
- Yamada, T.; Yamamoto, Y.; Hayamizu, Y.; Sekiguchi, A.; Tanaka, H.; Kobashi, K.; Futaba, D.N.; Hata, K. Torsion-Sensing Material from Aligned Carbon Nanotubes Wound onto a Rod Demonstrating Wide Dynamic Range. ACS Nano 2013, 7, 3177–3182. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, Y.; Li, X.; Zhang, Y.; Li, X.; Wang, K.; Wu, D.; Jin, H.; Li, Z.; Zhu, H. Torsion Sensors of High Sensitivity and Wide Dynamic Range Based on a Graphene Woven Structure. Nanoscale 2014, 6, 13053. [Google Scholar] [CrossRef]
- Liu, Z.F.; Fang, S.; Moura, F.A.; Ding, J.N.; Jiang, N.; Di, J.; Zhang, M.; Lepró, X.; Galvão, D.S.; Haines, C.S.; et al. Hierarchically Buckled Sheath-Core Fibers for Superelastic Electronics, Sensors, and Muscles. Science 2015, 349, 400–404. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Liu, Z.; Ding, J.; Lepró, X.; Fang, S.; Jiang, N.; Yuan, N.; Wang, R.; Yin, Q.; Lv, W.; et al. Downsized Sheath–Core Conducting Fibers for Weavable Superelastic Wires, Biosensors, Supercapacitors, and Strain Sensors. Adv. Mater. 2016, 28, 4998–5007. [Google Scholar] [CrossRef]
- Wang, R.; Jiang, N.; Su, J.; Yin, Q.; Zhang, Y.; Liu, Z.; Lin, H.; Moura, F.A.; Yuan, N.; Roth, S.; et al. A Bi-Sheath Fiber Sensor for Giant Tensile and Torsional Displacements. Adv. Funct. Mater. 2017, 27, 1702134. [Google Scholar] [CrossRef]
- Li, Z.; Qi, X.; Xu, L.; Lu, H.; Wang, W.; Jin, X.; Islam, Z.; Zhu, Y.; Fu, Y.; Ni, Q.; et al. Self-Repairing, Large Linear Working Range Shape Memory Carbon Nanotubes/Ethylene Vinyl Acetate Fiber Strain Sensor for Human Movement Monitoring. ACS Appl. Mater. Interfaces 2020, 12, 42179–42192. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Zhou, B.; Zhou, Y.; Ma, J.; Zhou, F.; Chen, S.; Jerrams, S.; Jiang, L. Carbon Nanotube Coated Fibrous Tubes for Highly Stretchable Strain Sensors Having High Linearity. Nanomaterials 2022, 12, 2458. [Google Scholar] [CrossRef] [PubMed]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.-K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-Like Pressure and Strain Sensors Based on Transparent Elastic Films of Carbon Nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Tang, Z.; Jia, S.; Wang, F.; Bian, C.; Chen, B.; Wang, Y.; Li, B. Highly stretchable Core−Sheath Fibers via Wet-Spinning for Wearable Strain Sensors. ACS Appl. Mater. Interfaces 2018, 10, 6624–6635. [Google Scholar] [CrossRef]
- Shang, Y.; He, X.; Li, Y.; Zhang, L.; Li, Z.; Ji, C.; Shi, E.; Li, P.; Zhu, K.; Peng, Q.; et al. Super-Stretchable Spring-Like Carbon Nanotube Ropes. Adv. Mater. 2012, 24, 2896–2900. [Google Scholar] [CrossRef]
- Shang, Y.; Li, Y.; He, X.; Du, S.; Zhang, L.; Shi, E.; Wu, S.; Li, Z.; Li, P.; Wei, J.; et al. Highly Twisted Double-Helix Carbon Nanotube Yarns. ACS Nano 2013, 7, 1446–1453. [Google Scholar] [CrossRef]
- Li, Y.; Shang, Y.; He, X.; Peng, Q.; Du, S.; Shi, E.; Wu, S.; Li, Z.; Li, P.; Cao, A. Overtwisted, Resolvable Carbon Nanotube Yarn Entanglement as Strain Sensors and Rotational Actuators. ACS Nano 2013, 7, 8128–8135. [Google Scholar] [CrossRef]
- Shang, Y.; Li, Y.; He, X.; Zhang, L.; Li, Z.; Li, P.; Shi, E.; Wu, S.; Cao, A. Elastic Carbon Nanotube Straight Yarns Embedded with Helical Loops. Nanoscale 2013, 5, 2403–2410. [Google Scholar] [CrossRef]
- Son, W.; Chun, S.; Lee, J.M.; Lee, Y.; Park, J.; Suh, D.; Lee, D.W.; Jung, H.; Kim, Y.-J.; Kim, Y.; et al. Highly Twisted Supercoils for Superelastic Multi-Functiona Fibres. Nat. Commun. 2019, 10, 426. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Guo, F.; Cao, P.; Liu, J.; Li, D.; Wu, J.; Wang, N.; Su, Y.; Zhao, Y. Winding-Locked Carbon Nanotubes/Polymer Nanofibers Helical Yarn for Ultrastretchable Conductor and Strain Sensor. ACS Nano 2020, 14, 3442–3450. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L.; Mengüç, Y.; Kolesky, D.B.; Wood, R.J.; Lewis, J.A. Embedded 3D Printing of Strain Sensors within Highly Stretchable Elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable Silicon Nanoribbon Electronics for Skin Prosthesis. Nat. Commun. 2014, 5, 5747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, C.; Lee, J.M.; Kim, S.H.; Kim, S.J. Twistable and Stretchable Sandwich Structured Fiber for Wearable Sensors and Supercapacitors. Nano Lett. 2016, 16, 7677–7684. [Google Scholar] [CrossRef] [PubMed]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Duan, Z.; Jiang, Y.; Huang, Q.; Zhao, Q.; Yuan, Z.; Zhang, Y.; Wang, S.; Liu, B.; Tai, H. Integrated cross-section interface engineering and surface encapsulating strategy: A high-response, waterproof, and low-cost paper-based bending strain sensor Development of low hysteresis. J. Mater. Chem. C. 2021, 9, 14003–14011. [Google Scholar] [CrossRef]
- Chun, S.; Son, W.; Kim, H.; Lim, S.K.; Pang, C.; Choi, C. Self-Powered Pressure- and Vibration-Sensitive Tactile Sensors for Learning Technique-Based Neural Finger Skin. Nano Lett. 2019, 19, 3305–3312. [Google Scholar] [CrossRef]
- Chun, S.; Kim, J.-S.; Yoo, Y.; Choi, Y.; Jung, S.J.; Jang, D.; Lee, G.; Song, K.-I.; Nam, K.S.; Youn, I.; et al. An Artificial Neural Tactile Sensing System. Nat. Electron. 2021, 4, 429–438. [Google Scholar] [CrossRef]
- Chun, S.; Son, W.; Lee, G.; Kim, S.H.; Park, J.W.; Kim, S.J.; Pang, C.; Choi, C. Single-Layer Graphene-Based Transparent and Flexible Multifunctional Electronics for Self-Charging Power and Touch-Sensing Systems. ACS Appl. Mater. Interfaces 2019, 11, 9301–9308. [Google Scholar] [CrossRef]
- Liao, X.; Liao, Q.; Zhang, Z.; Yan, X.; Liang, Q.; Wang, Q.; Li, M.; Zhang, Y. A Highly Stretchable ZnO@Fiber-Based Multifunctional Nanosensor for Strain/Temperature/UV Detection. Adv. Funct. Mater. 2016, 26, 3074–3081. [Google Scholar] [CrossRef]
- Zhang, M.; Fang, S.; Zakhidov, A.A.; Lee, S.B.; Aliev, A.E.; Williams, C.D.; Atkinson, K.R.; Baughman, R.H. Strong, Transparent, Multifunctional, Carbon Nanotube Sheets. Science 2005, 309, 1215–1219. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G.M.; Wallace, G.G.; Oh, J.; Kozlov, M.E.; Fang, S.; Mirfakhrai, T.; Madden, J.D.W.; Shin, M.K.; Kim, S.J.; et al. Torsional Carbon Nanotube Artificial Muscles. Science 2011, 334, 494–497. [Google Scholar] [CrossRef] [PubMed]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Choi, C. Elastomeric Core/Conductive Sheath Fibers for Tensile and Torsional Strain Sensors. Sensors 2022, 22, 8934. https://doi.org/10.3390/s22228934
Kim J, Choi C. Elastomeric Core/Conductive Sheath Fibers for Tensile and Torsional Strain Sensors. Sensors. 2022; 22(22):8934. https://doi.org/10.3390/s22228934
Chicago/Turabian StyleKim, Jeeeun, and Changsoon Choi. 2022. "Elastomeric Core/Conductive Sheath Fibers for Tensile and Torsional Strain Sensors" Sensors 22, no. 22: 8934. https://doi.org/10.3390/s22228934