
Joint Power Control and Phase Shift Design for Future PD-NOMA IRS-Assisted Drone Communications under Imperfect SIC Decoding

 , ,
, ,
Abstract
:1. Introduction
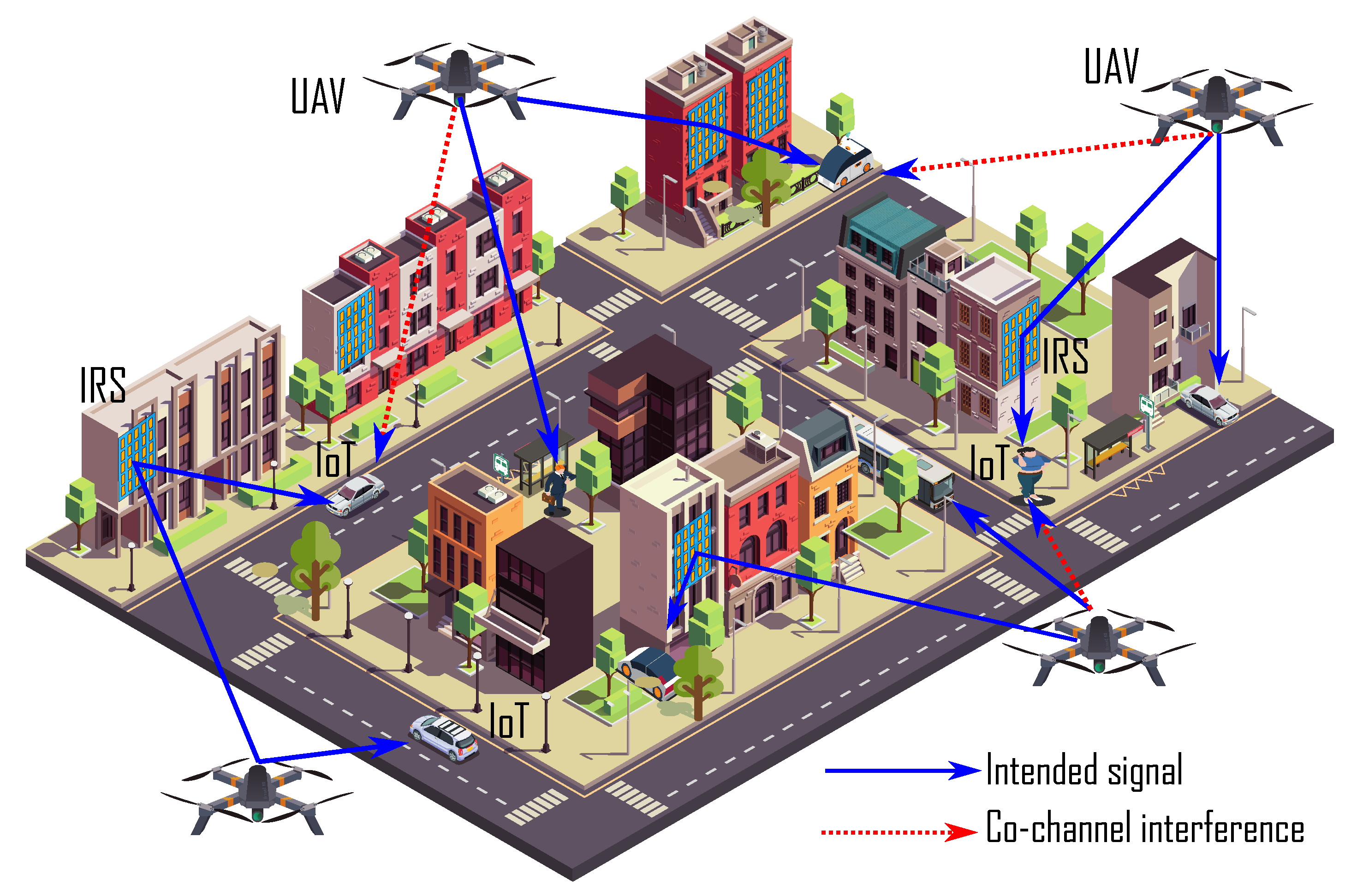
- A downlink PD-NOMA system is considered that consists of multiple drones, multiple IRSs, and IoT devices, where each drone in its coverage area communicates with IoT devices through direct and IRS-assisted links. Due to large objects in urban areas, IRSs are mounted on strategic positions to assist the signal delivery from drones to IoT devices. To maximize the spectral efficiency of the system, each drone shares the same spectrum resources. Thus, IoT devices in the coverage area of one drone receive interference from neighboring drones. Besides that, IoT devices in the same coverage area also cause PD-NOMA interference. Moreover, interference due to imperfect SIC also exists in the system. Therefore, the objective of this framework is to enhance the sum capacity of the system through efficient resource allocation.
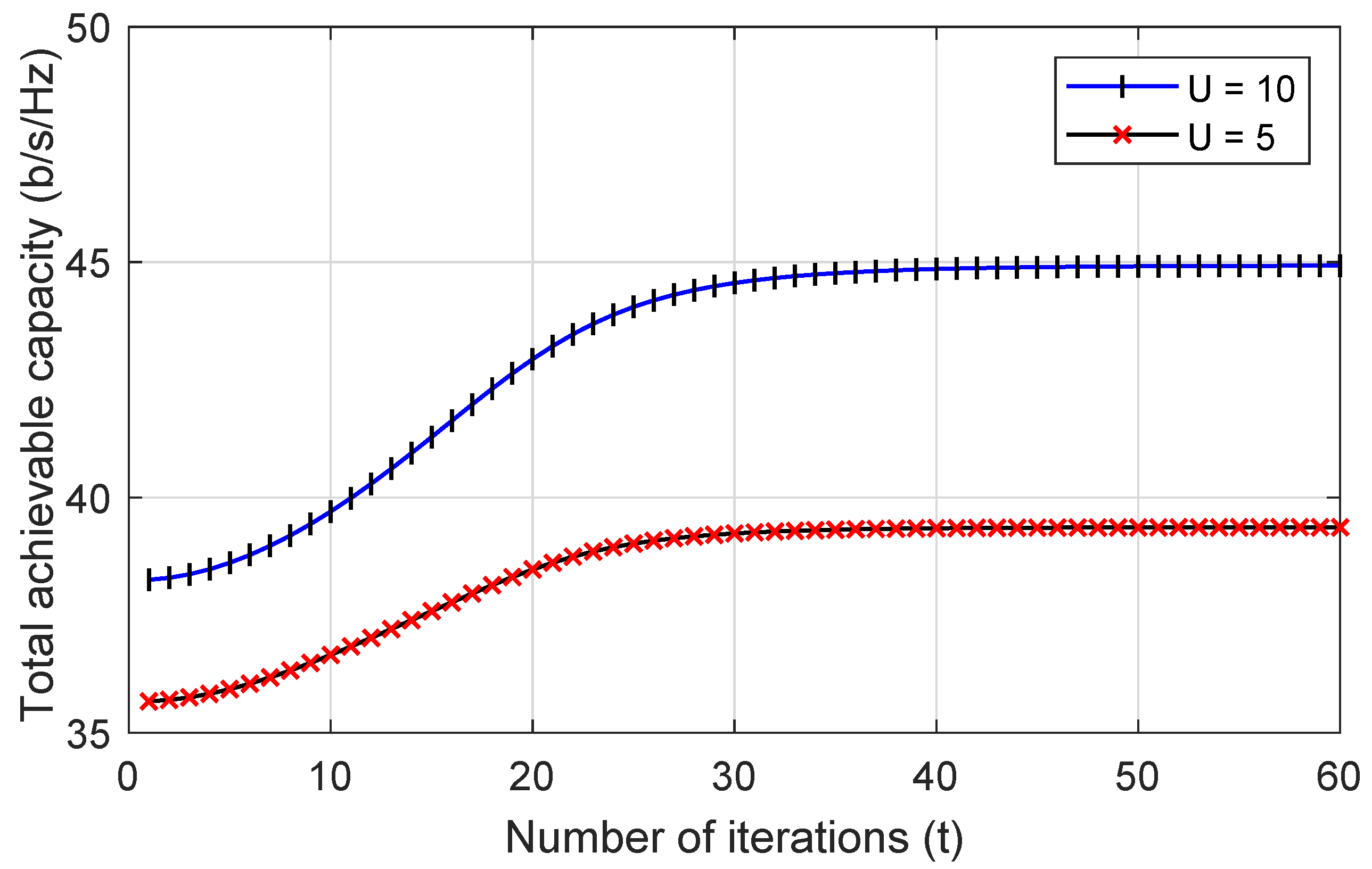
- The problem is formulated to enhance the sum capacity maximization of the system subject to quality of services and other practical constraints. In particular, the proposed approach simultaneously optimizes the transmit power budget of drones, PD-NOMA power allocation for IoT devices, and phase shift design of IRSs. Due to the non-convex nature of the formulated problem, computing optimal solution directly is very challenging. To make it tractable and reduce the complexity, we first divide the joint problem into subproblems and then obtain an efficient solution. For power allocation subproblem, we adopt a Lagrangian method based on KKT conditions where dual variables are updated iteratively. Next, for efficient phase shift design, we employ successive convex approximation and the DC programming method.
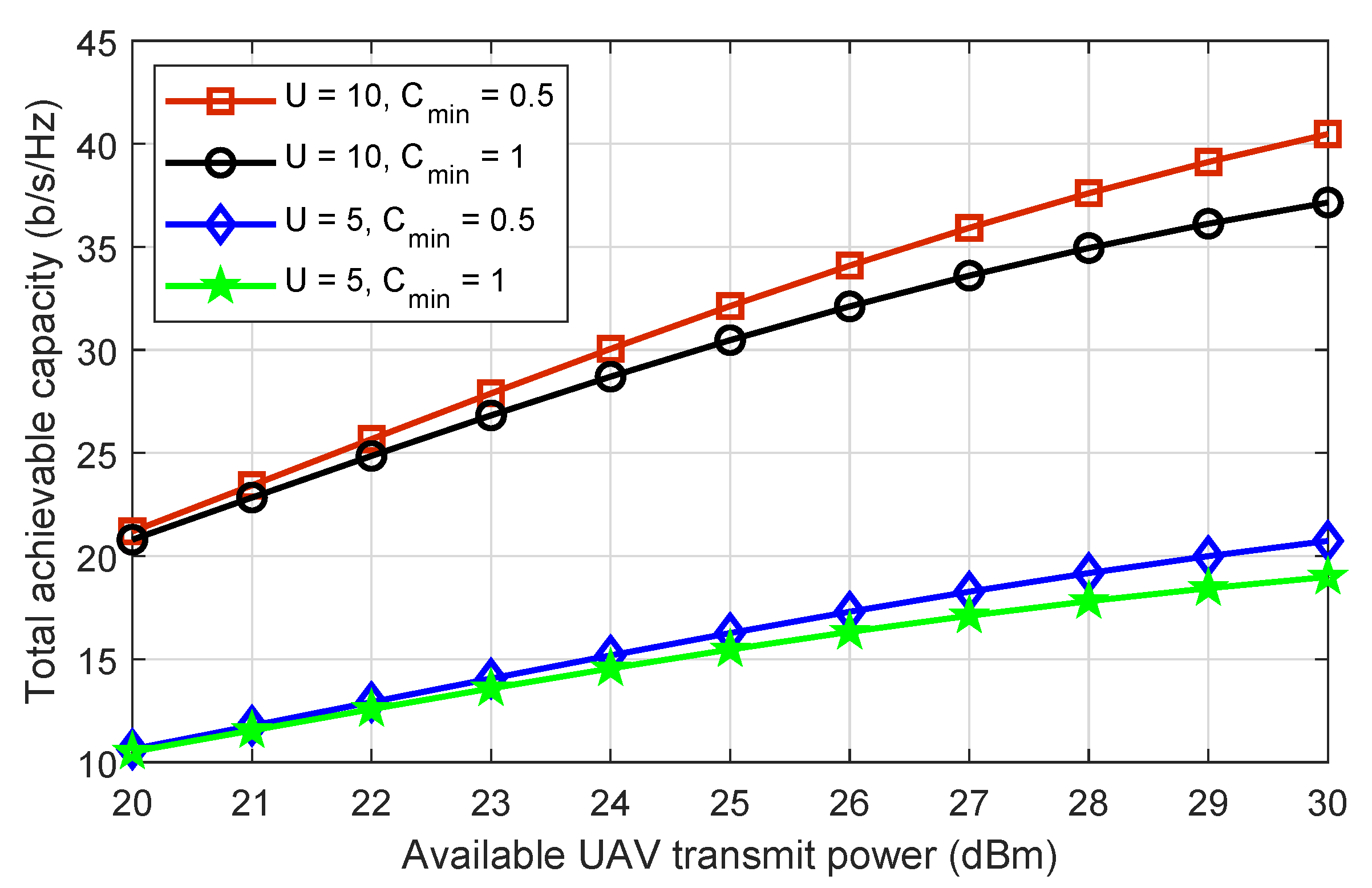
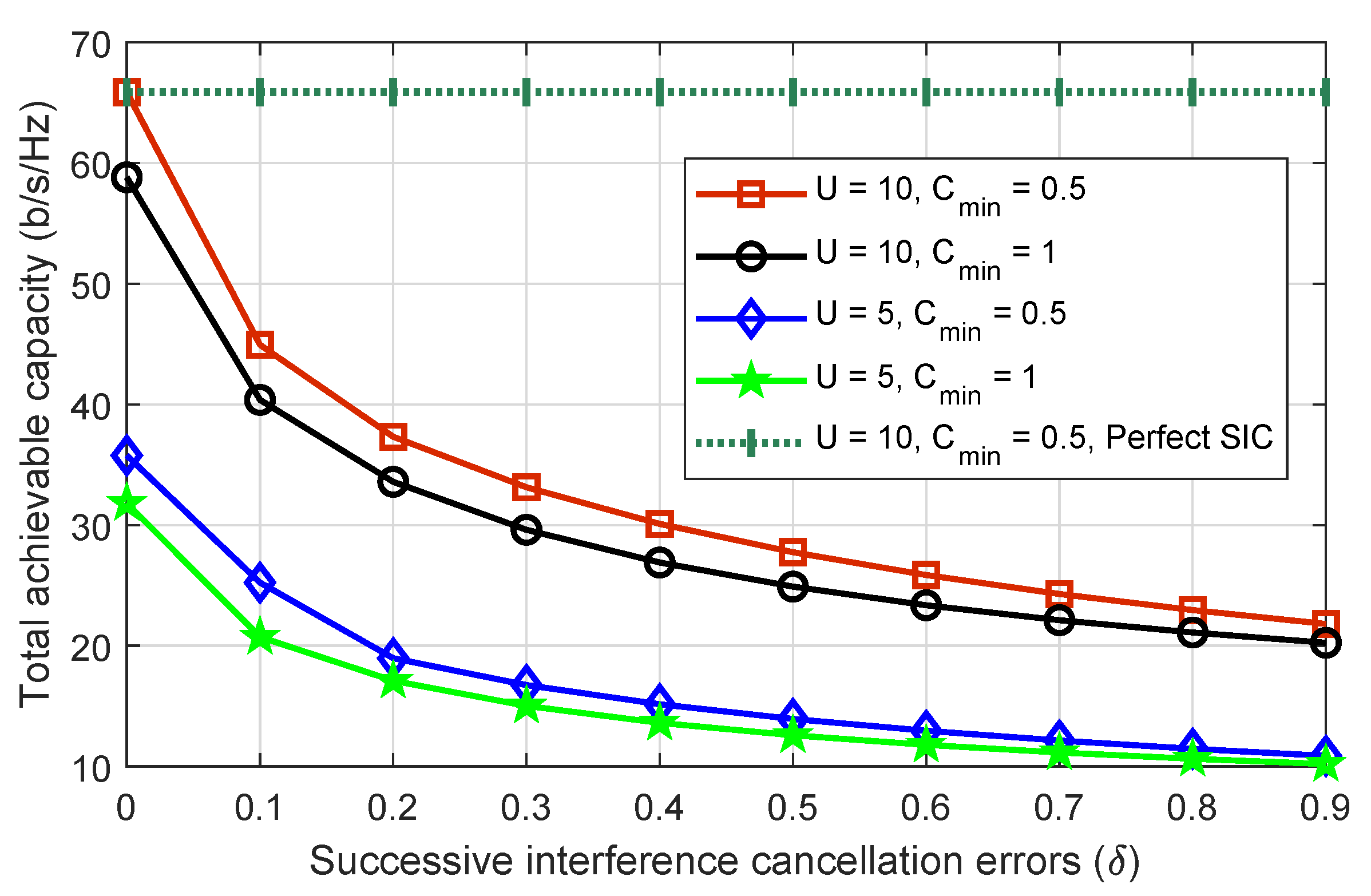
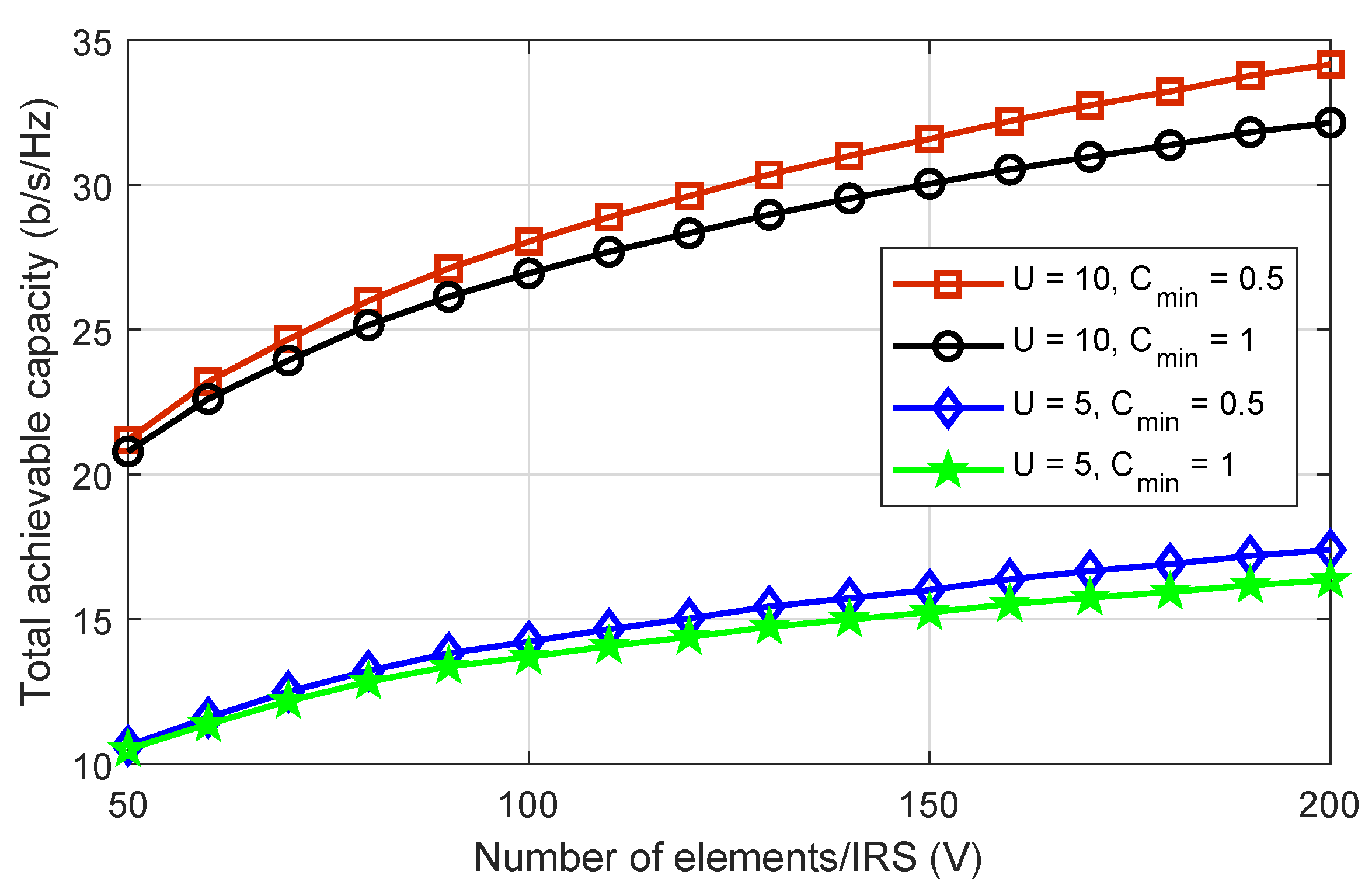
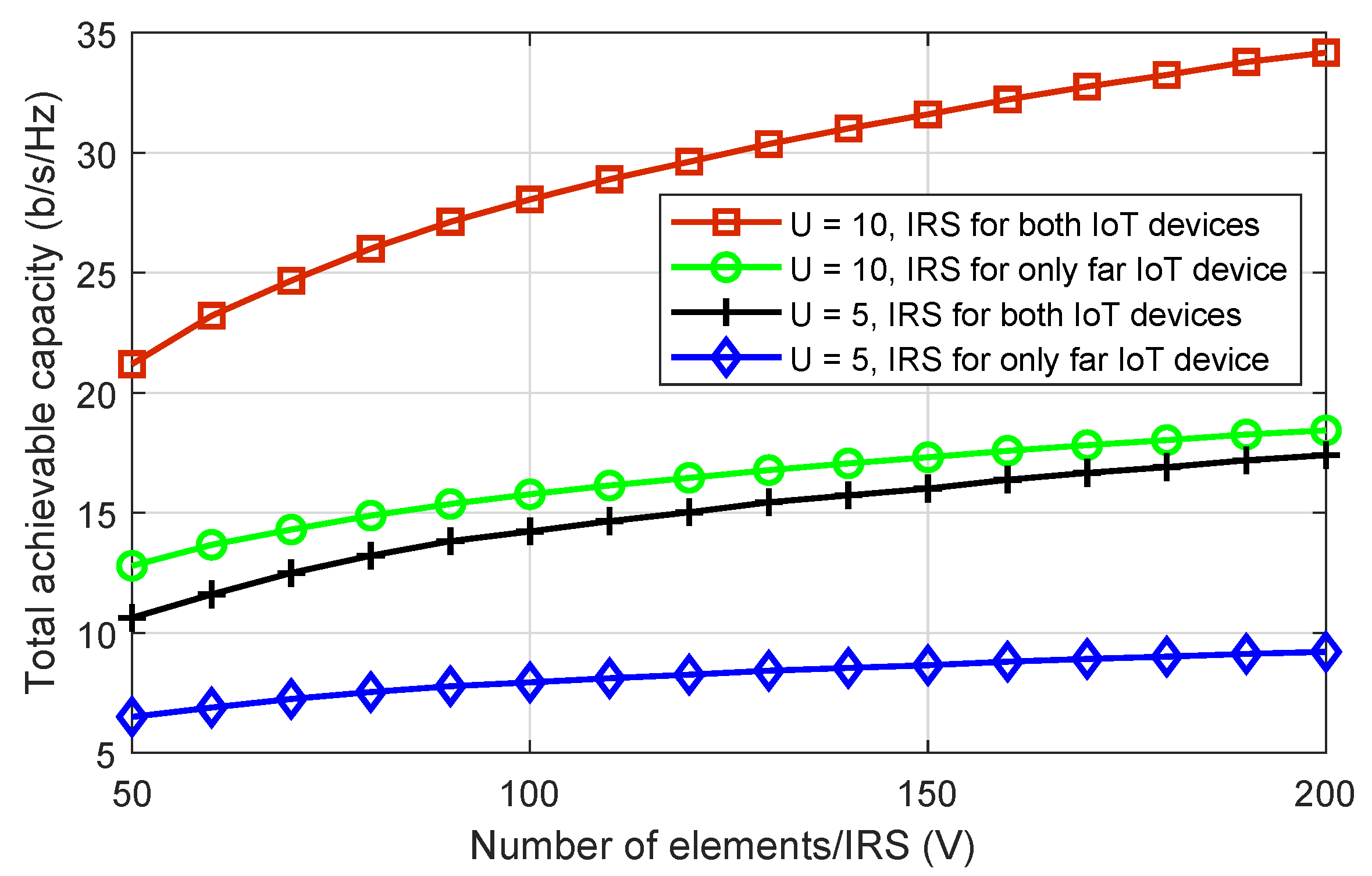
- To validate the proposed solution, numerical results are provided to check the system’s performance with respect to different optimization variables. For better analysis, we compare the proposed solution with benchmark solutions such as a solution with perfect SIC decoding, a solution without IRS, and a solution where only long-distance IoT device signals can be assisted by IRS. The results demonstrate that the proposed approach outperforms the benchmark solutions in the sum capacity maximization of the system. Moreover, our approach contain very low complexity and converges within a few iterations.
Recent Literature
2. System Model and Problem Formulation
3. Proposed Optimization Solution
3.1. Efficient Power Allocation
3.2. Efficient Phase Shift Design
4. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. γ 0, γ 1, γ 2, γ 3, γ 4, and γ 5
Appendix B. φ 0, φ 1, φ 2, and φ 3
References
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for physical layer security in UAV communication enhanced with intelligent reflective surfaces. arXiv 2022, arXiv:2203.16907. [Google Scholar]
- Nguyen, K.K.; Masaracchia, A.; Sharma, V.; Poor, H.V.; Duong, T.Q. RIS-assisted UAV communications for IoT with wireless power transfer using deep reinforcement learning. IEEE J. Sel. Top. Signal Process. 2022, 16, 1086–1096. [Google Scholar] [CrossRef]
- Rasheed, I.; Asif, M.; Ihsan, A.; Khan, W.U.; Ahmed, M.; Rabie, K.M. LSTM-based distributed conditional generative adversarial network for data-driven 5G-enabled maritime UAV communications. IEEE Trans. Intell. Transp. Syst. 2022, 1–16. [Google Scholar] [CrossRef]
- Mahmood, A.; Vu, T.; Khan, W.U.; Chatzinotas, S.; Ottersten, B. Optimizing Computational and Communication Resources for MEC Network Empowered UAV-RIS Communications. TechRxiv 2022. [Google Scholar] [CrossRef]
- Khan, W.U.; Ihsan, A.; Nguyen, T.N.; Javed, M.A.; Ali, Z. NOMA-enabled Backscatter Communications for Green Transportation in Automotive-Industry 5.0. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Li, J.; Niu, Y.; Wu, H.; Ai, B.; Chen, S.; Feng, Z.; Zhong, Z.; Wang, N. Mobility Support for Millimeter Wave Communications: Opportunities and Challenges. IEEE Commun. Surv. Tutor. 2022, 24, 1816–1842. [Google Scholar] [CrossRef]
- Khan, W.U.; Jamshed, M.A.; Lagunas, E.; Chatzinotas, S.; Li, X.; Ottersten, B. Energy efficiency optimization for backscatter enhanced NOMA cooperative V2X communications under imperfect CSI. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Chatzinotas, S.; Ottersten, B. Integration of NOMA with reflecting intelligent surfaces: A multi-cell optimization with SIC decoding errors. arXiv 2022, arXiv:2205.03248. [Google Scholar]
- Mahmood, A.; Hong, Y.; Ehsan, M.K.; Mumtaz, S. Optimal resource allocation and task segmentation in IoT enabled mobile edge cloud. IEEE Trans. Veh. Technol. 2021, 70, 13294–13303. [Google Scholar] [CrossRef]
- Mahmood, A.; Ahmed, A.; Naeem, M.; Amirzada, M.R.; Al-Dweik, A. Weighted utility aware computational overhead minimization of wireless power mobile edge cloud. Comput. Commun. 2022, 190, 178–189. [Google Scholar] [CrossRef]
- Mahmood, A.; Ahmed, A.; Naeem, M.; Hong, Y. Partial offloading in energy harvested mobile edge computing: A direct search approach. IEEE Access 2020, 8, 36757–36763. [Google Scholar] [CrossRef]
- Abbas, G.; Abbas, Z.H.; Khan, W.U. On Reliable Key Performance Indicators in Cognitive Radio Networks. IEEE Netw. Lett. 2021, 4, 11–15. [Google Scholar]
- Sarieddeen, H.; Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.S. Next Generation Terahertz Communications: A Rendezvous of Sensing, Imaging, and Localization. IEEE Commun. Mag. 2020, 58, 69–75. [Google Scholar] [CrossRef]
- Khan, W.U.; Ali, Z.; Lagunas, E.; Mahmood, A.; Asif, M.; Ihsan, A.; Chatzinotas, S.; Ottersten, B.; Dobre, O.A. Rate Splitting Multiple Access for Next Generation Cognitive Radio Enabled LEO Satellite Networks. arXiv 2022, arXiv:2208.03705. [Google Scholar]
- Khan, W.U.; Nguyen, T.N.; Jameel, F.; Jamshed, M.A.; Pervaiz, H.; Javed, M.A.; Jäntti, R. Learning-based resource allocation for backscatter-aided vehicular networks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 19676–19690. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, L.; Ng, D.W.K.; Yuan, J.; Hanzo, L. On the performance gain of NOMA over OMA in uplink communication systems. IEEE Trans. Commun. 2019, 68, 536–568. [Google Scholar] [CrossRef] [Green Version]
- Ding, Z.; Lv, L.; Fang, F.; Dobre, O.A.; Karagiannidis, G.K.; Al-Dhahir, N.; Schober, R.; Poor, H.V. A State-of-the-Art Survey on Reconfigurable Intelligent Surface-Assisted Non-Orthogonal Multiple Access Networks. Proc. IEEE 2022, 110, 1358–1379. [Google Scholar] [CrossRef]
- Khan, W.U.; Jameel, F.; Li, X.; Bilal, M.; Tsiftsis, T.A. Joint spectrum and energy optimization of NOMA-enabled small-cell networks with QoS guarantee. IEEE Trans. Veh. Technol. 2021, 70, 8337–8342. [Google Scholar] [CrossRef]
- Ihsan, A.; Chen, W.; Asif, M.; Khan, W.U.; Li, J. Energy-efficient IRS-aided NOMA beamforming for 6G wireless communications. arXiv 2022, arXiv:2203.16099. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Di Renzo, M.; Hao, Y.; Wang, J.; Swindlehurst, A.L.; et al. Reconfigurable intelligent surfaces for 6G systems: Principles, applications, and research directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Khan, W.U.; Javed, M.A.; Zeadally, S.; Lagunas, E.; Chatzinotas, S. Intelligent and secure radio environments for 6G vehicular aided HetNets: Key opportunities and challenges. arXiv 2022, arXiv:2210.02172. [Google Scholar]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Park, K.W.; Kim, H.M.; Shin, O.S. A Survey on Intelligent-Reflecting-Surface-Assisted UAV Communications. Energies 2022, 15, 5143. [Google Scholar] [CrossRef]
- Khan, M.A.; Kumar, N.; Mohsan, S.A.H.; Khan, W.U.; Nasralla, M.M.; Alsharif, M.H.; Żywiołek, J.; Ullah, I. Swarm of UAVs for network management in 6G: A technical review. IEEE Trans. Netw. Serv. Manag. 2022. [Google Scholar] [CrossRef]
- Size, C.D.M. Market Research Reports, Consulting. Available online: https://www.gminsights.com/toc/detail/unmanned-aerial-vehicles-UAV-commercial-drone-market (accessed on 6 November 2022).
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, Z.; Huang, C.; Yuen, C. Robust resource allocation algorithm for energy-harvesting-based D2D communication underlaying UAV-assisted networks. IEEE Internet Things J. 2021, 8, 17161–17171. [Google Scholar] [CrossRef]
- Wan, S.; Lu, J.; Fan, P.; Letaief, K.B. Toward big data processing in IoT: Path planning and resource management of UAV base stations in mobile-edge computing system. IEEE Internet Things J. 2019, 7, 5995–6009. [Google Scholar] [CrossRef] [Green Version]
- Ding, R.; Gao, F.; Shen, X.S. 3D UAV trajectory design and frequency band allocation for energy-efficient and fair communication: A deep reinforcement learning approach. IEEE Trans. Wirel. Commun. 2020, 19, 7796–7809. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, X.; Zhang, B.; Zhang, Y.; Niu, Z.; Kuang, N.; Chen, W.; Li, L.; Li, S. A survey on terahertz communications. China Commun. 2019, 16, 1–35. [Google Scholar] [CrossRef]
- Song, W.; Rajak, S.; Dang, S.; Liu, R.; Li, J.; Chinnadurai, S. Deep Learning Enabled IRS for 6G Intelligent Transportation Systems: A Comprehensive Study. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Mohamed, E.M.; Hashima, S.; Hatano, K. Energy Aware Multi-Armed Bandit for Millimeter Wave Based UAV Mounted RIS Networks. IEEE Wirel. Commun. Lett. 2022, 11, 1293–1297. [Google Scholar] [CrossRef]
- Ge, L.; Dong, P.; Zhang, H.; Wang, J.B.; You, X. Joint Beamforming and Trajectory Optimization for Intelligent Reflecting Surfaces-Assisted UAV Communications. IEEE Access 2020, 8, 78702–78712. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.C.; Di Renzo, M. Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef] [Green Version]
- Shafique, T.; Tabassum, H.; Hossain, E. Optimization of wireless relaying with flexible UAV-borne reflecting surfaces. IEEE Trans. Commun. 2020, 69, 309–325. [Google Scholar] [CrossRef]
- Lu, H.; Zeng, Y.; Jin, S.; Zhang, R. Aerial intelligent reflecting surface: Joint placement and passive beamforming design with 3D beam flattening. IEEE Trans. Wirel. Commun. 2021, 20, 4128–4143. [Google Scholar] [CrossRef]
- Mahmood, A.; Reynoso, K.R.; Rahman, M.; Islam, S.A. Multi-Operator Intelligent UAV Delivery Networks in Beyond Visual Line of Sight Operations. In Proceedings of the 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2022; pp. 965–966. [Google Scholar]
- Zheng, B.; You, C.; Mei, W.; Zhang, R. A survey on channel estimation and practical passive beamforming design for intelligent reflecting surface aided wireless communications. IEEE Commun. Surv. Tutor. 2022, 24, 1035–1071. [Google Scholar] [CrossRef]
- Xia, W.; Rangan, S.; Mezzavilla, M.; Lozano, A.; Geraci, G.; Semkin, V.; Loianno, G. Generative neural network channel modeling for millimeter-wave UAV communication. IEEE Trans. Wirel. Commun. 2022. [Google Scholar] [CrossRef]
- Hematulin, W.; Kamsing, P.; Torteeka, P.; Somjit, T.; Phisannupawong, T.; Jarawan, T. Cooperative Motion Planning for Multiple UAVs via the Bézier Curve Guided Line of Sight Techniques. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Korea, 13–16 February 2022; pp. 230–236. [Google Scholar]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Ultra reliable UAV communication using altitude and cooperation diversity. IEEE Trans. Commun. 2017, 66, 330–344. [Google Scholar] [CrossRef] [Green Version]
- Cherif, N.; Alzenad, M.; Yanikomeroglu, H.; Yongacoglu, A. Downlink coverage and rate analysis of an aerial user in vertical heterogeneous networks (VHetNets). IEEE Trans. Wirel. Commun. 2020, 20, 1501–1516. [Google Scholar] [CrossRef]
- Pattepu, S.; Mukherjee, A.; Routray, S.; Mukherjee, P.; Qi, Y.; Datta, A. Multi-antenna relay based cyber-physical systems in smart-healthcare NTNs: An explainable AI approach. Clust. Comput. 2022, 1–11. [Google Scholar] [CrossRef]
- Khan, W.U.; Mahmood, A.; Bozorgchenani, A.; Jamshed, M.A.; Ranjha, A.; Lagunas, E.; Pervaiz, H.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for intelligent reflecting surfaces in 6G-empowered V2X communications. arXiv 2022, arXiv:2210.00494. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| U | Set of drones |
| u | Drone index |
| Phase shift matrix of IRS | |
| Amplitude of passive reflection of IRS element | |
| Phase shift of IRS element | |
| x | Transmitted superimposed signal of drone |
| v | Passive element of IRS |
| Index IoT devices | |
| Q | Power budget of drone |
| PD-NOMA power allocation coefficient | |
| h | Channel between drone and IRS |
| Reference channel gain over 1 meter | |
| 2D coordinate of drone | |
| Location of IRS and IoT devices on horizontal plane | |
| H | Altitude of drone |
| g | Channel between IRS and IoT devices |
| G | Rayleigh fading coefficient |
| D | Distance between IRS and IoT device |
| y | Received signal at IoT device |
| Additive white Gaussian noise | |
| C | Capacity of IoT device |
| Co-channel interference | |
| Minimum capacity of IoT devices | |
| Maximum power budget of IoT device | |
| Lagrangian function | |
| Vector of Lagrangian multipliers | |
| Lagrangian multiplier |
| Parameter | Definition |
|---|---|
| Number of drones | 10 |
| Number of IoT devices | 10 |
| Number of IRSs | 10 |
| Imperfect SIC parameter | 0.1 |
| Monte Carlo simulation | 1000 |
| IRS passive elements | 50 |
| Power budget of each drone | 30 |
| Path loss exponent | 3 |
| Additive white Gaussian noise | 0.01 |
| Altitude of drone | 80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aziz, S.; Irshad, M.; Afef, K.; Mohamed, H.G.; Alotaibi, N.; Tarmissi, K.; Alnfiai, M.M.; Hamza, M.A. Joint Power Control and Phase Shift Design for Future PD-NOMA IRS-Assisted Drone Communications under Imperfect SIC Decoding. Sensors 2022, 22, 8603. https://doi.org/10.3390/s22228603
Aziz S, Irshad M, Afef K, Mohamed HG, Alotaibi N, Tarmissi K, Alnfiai MM, Hamza MA. Joint Power Control and Phase Shift Design for Future PD-NOMA IRS-Assisted Drone Communications under Imperfect SIC Decoding. Sensors. 2022; 22(22):8603. https://doi.org/10.3390/s22228603
Chicago/Turabian StyleAziz, Saddam, Muhammad Irshad, Kallekh Afef, Heba G. Mohamed, Najm Alotaibi, Khaled Tarmissi, Mrim M. Alnfiai, and Manar Ahmed Hamza. 2022. "Joint Power Control and Phase Shift Design for Future PD-NOMA IRS-Assisted Drone Communications under Imperfect SIC Decoding" Sensors 22, no. 22: 8603. https://doi.org/10.3390/s22228603