

A Lower Bound on the Estimation Variance of Direction-of-Arrival and Skew Angle of a Biaxial Velocity Sensor Suffering from Stochastic Loss of Perpendicularity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Statistical Data Model
2.1. Array Manifold
2.2. Received Signal Model
3. Deriving the Hybrid Cramér-Rao Bound
- If , then and .
- If , then and (please see Appendix A for the proof).
- If , then and .
4. Discussing the Derived Bounds
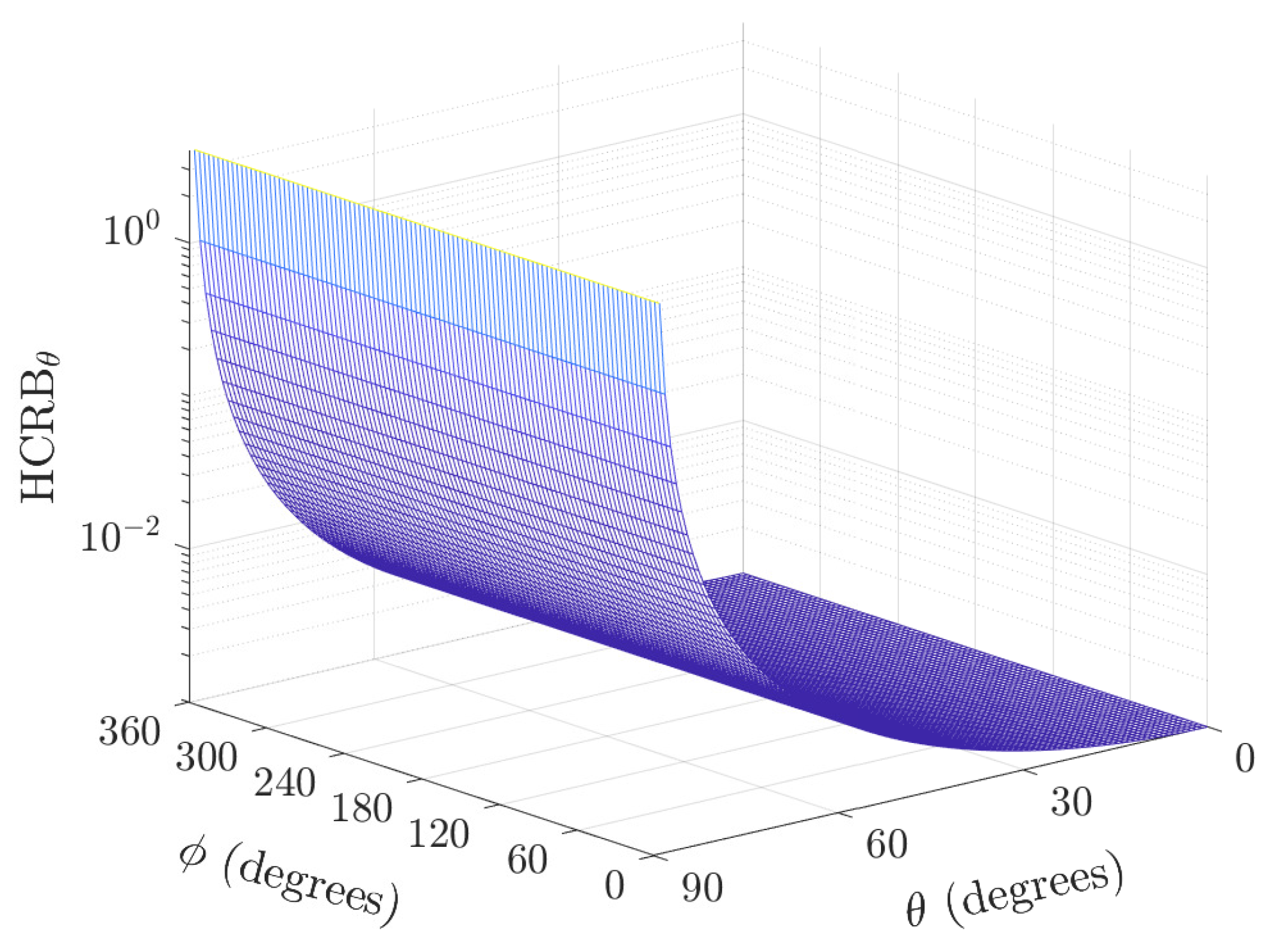
4.1. Hybrid CRB for Polar Angle, HCRB
4.2. Hybrid CRB for Azimuth Angle, HCRB
4.3. Hybrid CRB for the Skew Angle, HCRB
5. Hybrid Maximum Likelihood and Maximum A Posterior (Hybrid ML/MAP) Estimator to Verify the Derived Bounds
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Expectations of Sine and Cosine of the Gaussian Random Variable
References
- Nehorai, A.; Paldi, E. Acoustic vector-sensor array processing. IEEE Trans. Signal Process. 1994, 42, 2481–2491. [Google Scholar] [CrossRef]
- Awad, M.K.; Wong, K.T. Recursive Least-Squares Source Tracking using One Acoustic Vector Sensor. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3073–3083. [Google Scholar] [CrossRef]
- Fauziya, F.; Lall, B.; Agrawal, M. Impact of vector sensor on underwater acoustic communications system. IET Radar Sonar Navig. 2018, 12, 1500–1508. [Google Scholar] [CrossRef]
- Guo, L.X.; Han, X.; Yin, J.W.; Yu, X.S. Underwater Acoustic Communication by a Single-Vector Sensor: Performance Comparison Using Three Different Algorithms. Shock Vib. 2018, 2018, 2510378. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, D.; Han, X.; Zhu, Z. Feature Extraction of Underwater Target Signal Using Mel Frequency Cepstrum Coefficients Based on Acoustic Vector Sensor. J. Sensors 2016, 2016, 7864213. [Google Scholar] [CrossRef] [Green Version]
- Santos, P.; Rodríguez, O.C.; Felisberto, P.; Jesus, S.M. Seabed geoacoustic characterization with a vector sensor array. J. Acoust. Soc. Am. 2010, 128, 2652–2663. [Google Scholar] [CrossRef] [Green Version]
- Niu, F.; Hui, J.; Zhao, Z.S. Research on vector acoustic focusing and shielding technology. Ocean. Eng. 2016, 125, 90–94. [Google Scholar] [CrossRef] [Green Version]
- de Bree, H.E.; Druyvesteyn, E.; Raangs, R. A low cost intensity probe. J. Audio Eng. Soc. 2001, 110, 5292. [Google Scholar]
- Liu, S.; Lan, Y.; Zhou, T. Theory and design of acoustic dyadic sensor. In Proceedings of the 2016 IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Bastyr, K.J.; Lauchle, G.C.; McConnell, J.A. Development of a velocity gradient underwater acoustic intensity sensor. J. Acoust. Soc. Am. 1999, 106, 3178–3188. [Google Scholar] [CrossRef]
- Song, Y.; Wong, K.T.; Li, Y. Direction finding using a biaxial particle-velocity sensor. J. Sound Vib. 2015, 340, 354–367. [Google Scholar] [CrossRef]
- Raangs, R.; Druyvesteyn, W.; de Bree, H. A novel two-dimensional sound particle velocity probe for source localization and free field measurements in a diffuse field. In Proceedings of the Internoise, The Hague, The Netherlands, 27–30 August 2001; pp. 1919–1922. [Google Scholar]
- Wang, W.; Zhang, Q.; Zhu, W.P.; Shi, W.; Tan, W. DOA Estimation via Acoustic Sensor Array With Non-Orthogonal Elements. IEEE Sensors J. 2020, 20, 10696–10705. [Google Scholar] [CrossRef]
- de Bree, H.E.; Basten, T.; Yntema, D. A single broad banded 3D beamforming sound probe. In Proceedings of the Fortschritte der Akustik—DAGA, Dresden, Germany, 10–13 March 2008; pp. 651–652. [Google Scholar]
- Lee, C.H.; Lee, H.R.L.; Wong, K.T.; Razo, M. The spatial-matched-filter beam pattern of a biaxial non-orthogonal velocity sensor. J. Sound Vib. 2016, 367, 205–255. [Google Scholar] [CrossRef]
- Nnonyelu, C.J.; Wong, K.T.; Lee, C.H. Higher-order figure-8 sensors in a pair, skewed and collocated—Their azimuthal “spatial matched filter” beam-pattern. J. Acoust. Soc. Am. 2020, 147, 1195–1206. [Google Scholar] [CrossRef]
- Nnonyelu, C.J.; Lee, C.H.; Wong, K.T. Directional pointing error in “spatial matched filter” beamforming at a tri-Axial velocity-sensor with non-orthogonal axes. Proc. Meet. Acoust. 2018, 33, 055004. [Google Scholar] [CrossRef] [Green Version]
- De Freitas, J.M. Validation of a method to measure the vector fidelity of triaxial vector sensors. Meas. Sci. Technol. 2018, 29, 065106. [Google Scholar] [CrossRef]
- Tam, P.K.; Wong, K.T. Cramér-Rao Bounds for Direction Finding by an Acoustic Vector Sensor under Nonideal Gain-Phase Responses, Noncollocation, or Nonorthogonal Orientation. IEEE Sens. J. 2009, 9, 969–982. [Google Scholar] [CrossRef]
- Cramér, H. Mathematical Methods of Statistics; Princeton University Press: Princeton, NJ, USA, 1946. [Google Scholar]
- Reuven, I.; Messer, H. A Barankin-type lower bound on the estimation error of a hybrid parameter vector. IEEE Trans. Inf. Theory 1997, 43, 1084–1093. [Google Scholar] [CrossRef]
- Barankin, E.W. Locally Best Unbiased Estimates. Ann. Math. Stat. 1949, 20, 477–501. [Google Scholar] [CrossRef]
- McAulay, R.; Hofstetter, E. Barankin Bounds on Parameter Estimation. IEEE Trans. Inf. Theory 1971, 17, 669–676. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation and Modulation Theory, Part I; John Wiley and Sons: New York, NY, USA, 1968. [Google Scholar]
- Bobrovsky, B.; Zakai, M. A lower bound on the estimation error for certain diffusion processes. IEEE Trans. Inf. Theory 1976, 22, 45–52. [Google Scholar] [CrossRef]
- Rockah, Y.; Schultheiss, P. Array shape calibration using sources in unknown locations—Part I: Far-field sources. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 286–299. [Google Scholar] [CrossRef] [Green Version]
- Bay, S.; Geller, B.; Renaux, A.; Barbot, J.P.; Brossier, J.M. On the hybrid Cramér Rao Bound and Its Application to Dynamical Phase Estimation. IEEE Signal Process. Lett. 2008, 15, 453–456. [Google Scholar] [CrossRef] [Green Version]
- Messer, H.; Adar, Y. New lower bounds on frequency estimation of a multitone random signal in noise. Signal Process. 1989, 18, 413–424. [Google Scholar] [CrossRef]
- Miller, R.W.; Chang, C.B. A Modified Cramér-Rao Bound and its Applications. IEEE Trans. Inf. Theory 1978, 24, 398–400. [Google Scholar] [CrossRef]
- Gini, F.; Reggiannini, R.; Mengali, U. The modified Cramer–Rao bound in vector parameter estimation. IEEE Trans. Commun. 1998, 46, 52–60. [Google Scholar] [CrossRef] [Green Version]
- D’Andrea, A.; Mengali, U.; Reggiannini, R. The modified Cramer–Rao bound and its application to synchronization problems. IEEE Trans. Commun. 1994, 42, 1391–1399. [Google Scholar] [CrossRef]
- Noam, Y.; Messer, H. Notes on the Tightness of the hybrid CramÉr–Rao Lower Bound. IEEE Trans. Signal Process. 2009, 57, 2074–2084. [Google Scholar] [CrossRef]
- Kbayer, N.; Galy, J.; Chaumette, E.; Vincent, F.; Renaux, A.; Larzabal, P. On Lower Bounds for Nonstandard Deterministic Estimation. IEEE Trans. Signal Process. 2017, 65, 1538–1553. [Google Scholar] [CrossRef] [Green Version]
- Ren, C.; Galy, J.; Chaumette, E.; Larzabal, P.; Renaux, A. Hybrid Barankin–Weiss–Weinstein Bounds. IEEE Signal Process. Lett. 2015, 22, 2064–2068. [Google Scholar] [CrossRef] [Green Version]
- Ren, C.; Le Kernec, J.; Galy, J.; Chaumette, E.; Larzabal, P.; Renaux, A. A constrained hybrid Cramér-Rao bound for parameter estimation. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, Australia, 19–24 April 2015; pp. 3472–3476. [Google Scholar] [CrossRef]
- Ren, C.; Galy, J.; Chaumette, E.; Vincent, F.; Larzabal, P.; Renaux, A. Recursive hybrid Cramér–Rao Bound for Discrete-Time Markovian Dynamic Systems. IEEE Signal Process. Lett. 2015, 22, 1543–1547. [Google Scholar] [CrossRef]
- Kitavi, D.M.; Wong, K.T.; Lin, T.C.; Wu, Y.I. hybrid Cramér-Rao bound of direction finding, using a triad of cardioid sensors that are perpendicularly oriented and spatially collocated. J. Acoust. Soc. Am. 2019, 146, 1099–1109. [Google Scholar] [CrossRef]
- Wong, K.T.; Nnonyelu, C.J.; Wu, Y.I. A Triad of Cardioid Sensors in Orthogonal Orientation and Spatial Collocation—Its Spatial-Matched-Filter-Type Beam-Pattern. IEEE Trans. Signal Process. 2018, 66, 895–906. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation and Modulation Theory Part IV: Optimum Array Processing; John Wiley and Sons: New York, NY, USA, 2002. [Google Scholar]
- Van Trees, H.L.; Bell, K.L. A Modified Cramér-Rao Bound and its Applications. In Bayesian Bounds for Parameter Estimation and Nonlinear Filtering/Tracking; John Wiley and Sons: Hoboken, NJ, USA, 2007; pp. 160–162. [Google Scholar] [CrossRef]
- Casella, G.; Berger, R.L. Statistical Inference, 2nd ed.; Duxbury Press: Belmont, CA, USA, 2002. [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nnonyelu, C.J.; Jiang, M.; Lundgren, J. A Lower Bound on the Estimation Variance of Direction-of-Arrival and Skew Angle of a Biaxial Velocity Sensor Suffering from Stochastic Loss of Perpendicularity. Sensors 2022, 22, 8464. https://doi.org/10.3390/s22218464
Nnonyelu CJ, Jiang M, Lundgren J. A Lower Bound on the Estimation Variance of Direction-of-Arrival and Skew Angle of a Biaxial Velocity Sensor Suffering from Stochastic Loss of Perpendicularity. Sensors. 2022; 22(21):8464. https://doi.org/10.3390/s22218464
Chicago/Turabian StyleNnonyelu, Chibuzo Joseph, Meng Jiang, and Jan Lundgren. 2022. "A Lower Bound on the Estimation Variance of Direction-of-Arrival and Skew Angle of a Biaxial Velocity Sensor Suffering from Stochastic Loss of Perpendicularity" Sensors 22, no. 21: 8464. https://doi.org/10.3390/s22218464