

Analysis of Lane-Changing Decision-Making Behavior of Autonomous Vehicles Based on Molecular Dynamics

Abstract
:1. Introduction
2. Problem Formulation and Process Construction
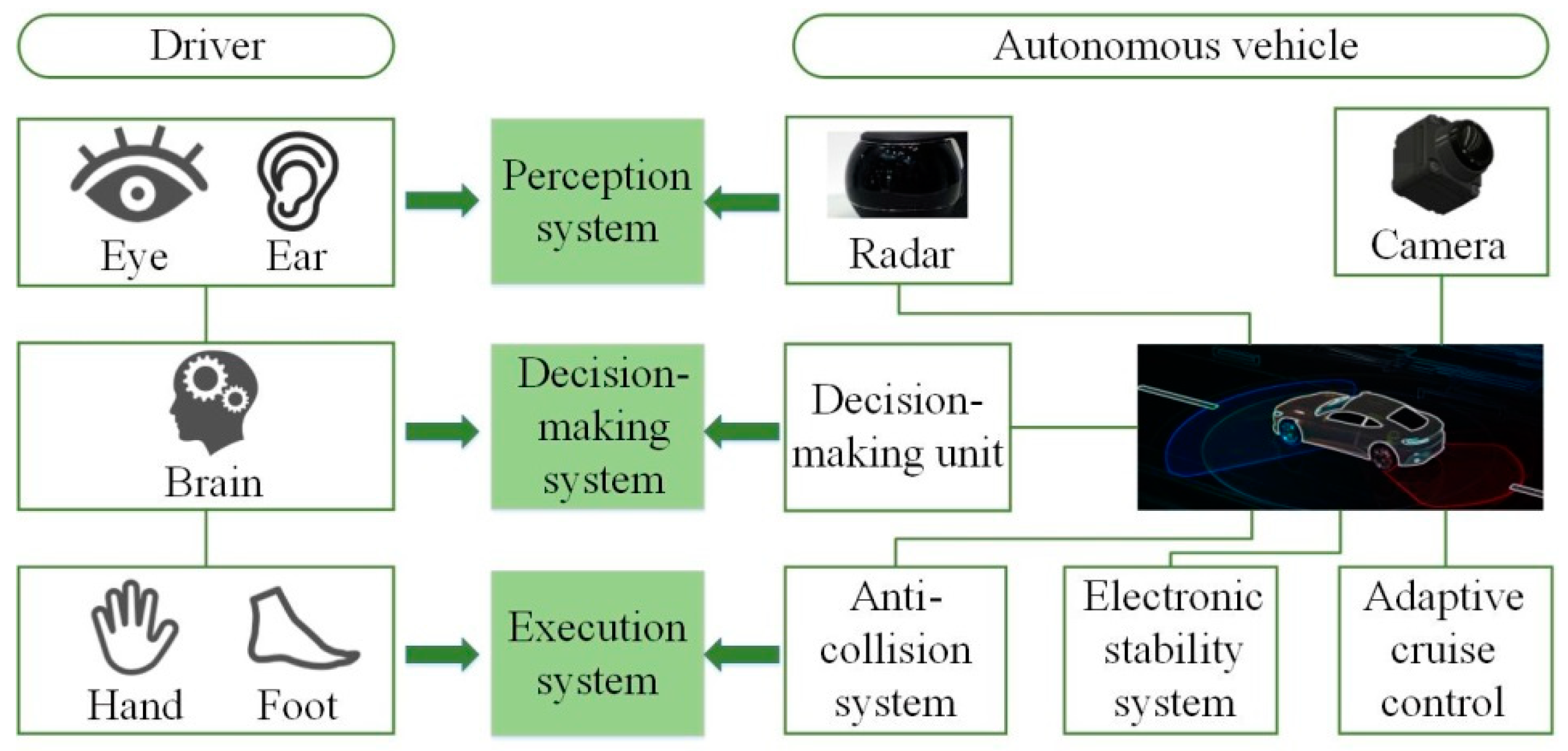
2.1. Environmental Perception before Lane-Changing Decision Making
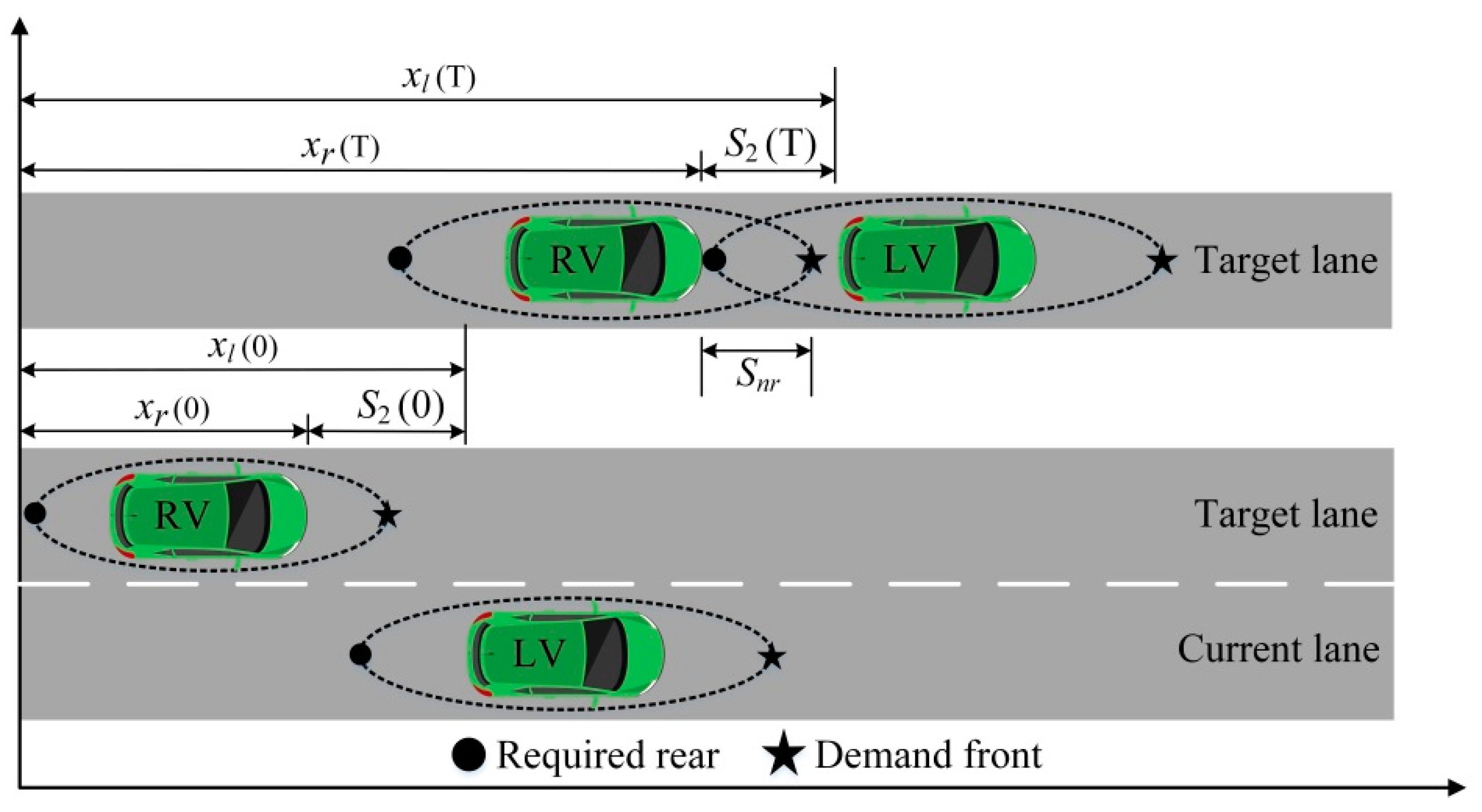
2.2. Analysis of Lane-Changing Behavior
2.3. Analysis of System Similarity of Lane Changing
3. Methodology
- (1)
- Autonomous vehicles have a high degree of automation and can operate autonomously;
- (2)
- Autonomous vehicles can obtain information, such as the position and speed, in real time, and can conduct communication between vehicles;
- (3)
- Autonomous vehicles are unified standard cars.
3.1. The Generation of the Lane-Changing Intention
3.2. Molecular-Dynamics Lane-Changing Model
4. Results
4.1. Experimental Platform and Environment
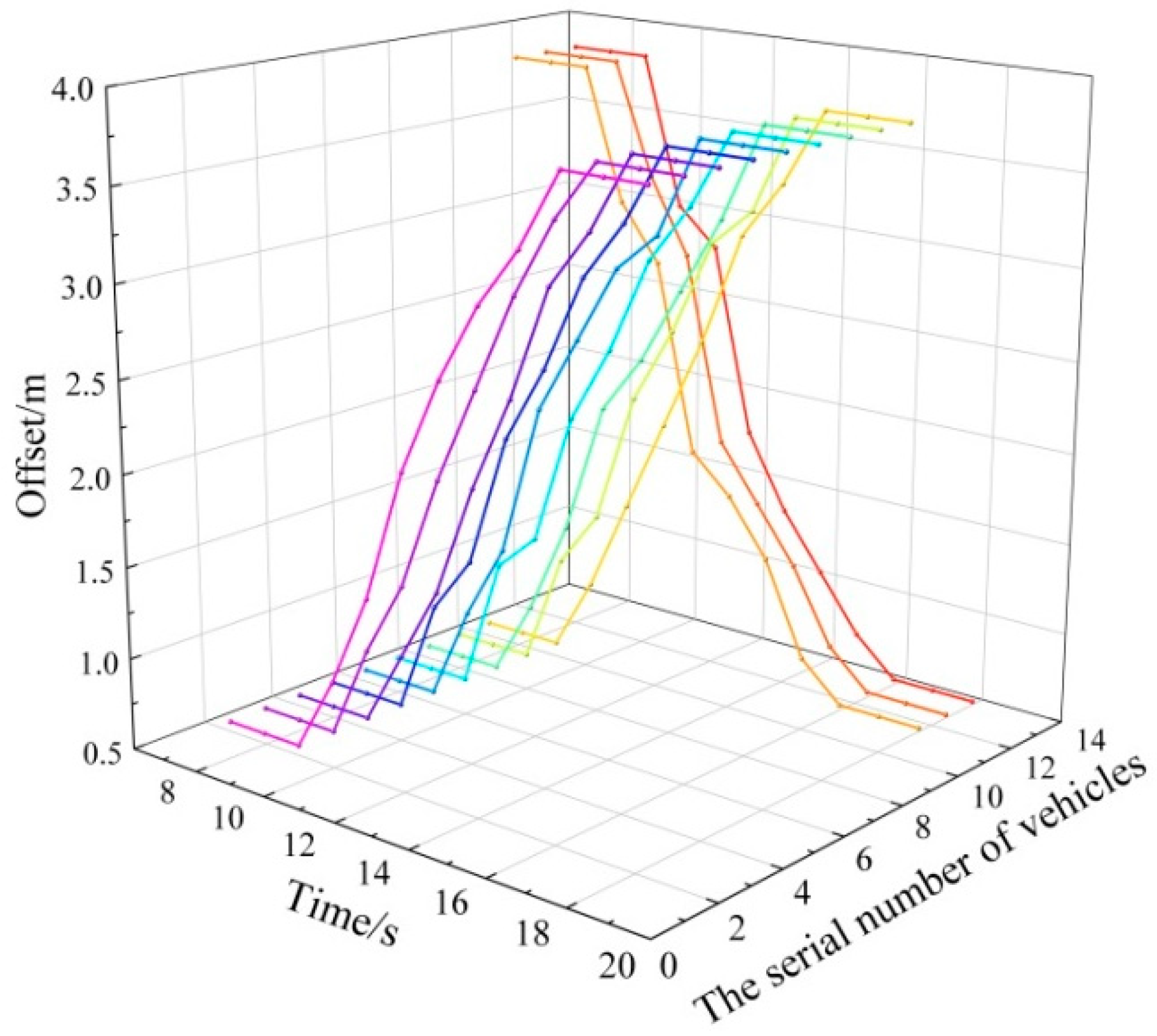
4.2. Analysis of Experimental Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yaqoob, I.; Khan, U.; Kazmi, A. Autonomous driving cars in smart cities: Recent advances, requirements, and challenges. IEEE Netw. 2019, 34, 174–181. [Google Scholar] [CrossRef]
- Behere, S.; Törngren, M. A functional reference architecture for autonomous driving. Inform. Softw. Technol. 2016, 73, 136–150. [Google Scholar] [CrossRef]
- Wang, W.; Qie, T.; Yang, C. An intelligent lane-changing behavior prediction and decision-making strategy for an autonomous vehicle. IEEE Trans. Ind. Electron. 2021, 69, 2927–2937. [Google Scholar] [CrossRef]
- Gipps, P. A Model for the structure of lane changing decisions. Transport. Res. B-Meth. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Jula, H.; Kosmatopoulos, B.; Ioannou, A. Collision avoidance analysis for lane changing and merging. IEEE Trans. Veh. Technol. 2000, 49, 2295–2308. [Google Scholar] [CrossRef] [Green Version]
- Kanaris, A.; Kosmatopoulos, B.; Loannou, A. Strategies and spacing requirements for lane changing and merging in automated highway systems. IEEE Trans. Veh. Technol. 2001, 50, 1568–1581. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, P.; Liang, H. A Multiple Attribute-Based Decision Making Model for Autonomous Vehicle in Urban Environment. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Du, Y.; Wang, Y.; Chan, C.-Y. Autonomous Lane-Change Controller. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015. [Google Scholar]
- Zhao, S.-E.; Ke, T.; Liu, P. Decision model of vehicle lane change based on Bayesian network. J. Chongqing Jiaotong Univ. 2020, 39, 130–137. [Google Scholar]
- Xu, L.-H.; Hu, S.-G.; Luo, Q. Lane-changing model based on different types of drivers. J. S. China Univ. Technol. 2014, 42, 104–111. [Google Scholar]
- Li, W.; Gao, D.-Z.; Duan, J.-M. Research on lane change model for intelligent vehicles. J. Highw. Transp. Res. Dev. 2010, 27, 119–123. [Google Scholar]
- Schubert, R.; Schulze, K.; Wanielik, G. Situation Assessment for Automatic Lane-Change Maneuvers. IEEE Trans. Intell. Transp. 2010, 11, 607–616. [Google Scholar] [CrossRef]
- Ulbrich, S.; Maurer, M. Situation Assessment in Tactical Lane Change Behavior Planning for Automated Vehicles. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Qiu, X.-P.; Liu, Y.-L.; Ma, L.-N. A lane change model based on Bayesian networks. J. Transp. Syst. Eng. Inf. Technol. 2015, 15, 67–73. [Google Scholar]
- Zhang, L.-L.; Zhu, H.; Ma, T.-Y. Model for vehicle driver’s behavior analysis based on Bayesian network. J. Transp. Inf. Saf. 2014, 32, 77–82. [Google Scholar]
- Gu, X.-P.; Han, Y.-P.; Yu, J.-F. Vehicle lane-changing decision model based on decision mechanism and support vector machine. J. Harbin Inst. Technol. 2020, 52, 111–121. [Google Scholar]
- Kuge, N.; Yamamura, T.; Shimoyama, O. A driver behavior recognition method based on a driver model framework. Sae. Int. J. Passen. Car. 2000, 109, 469–476. [Google Scholar]
- Hong, W.-W.; Wang, Y.-Q. Prediction method of lane changing frequency based on neural network and Markov chain. J. East China Jiaotong Univ. 2019, 36, 92–98. [Google Scholar]
- Brechtel, S.; Gindele, T.; Dillmann, R. Probabilistic Decision-Making under Uncertainty for Autonomous Driving Using Continuous POMDPs. In Proceedings of the 2014 IEEE 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014. [Google Scholar]
- Nilsson, J.; Sjoberg, J. Strategic Decision Making for Automated Driving on Two-Lane, One Way Roads Using Model Predictive Control. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium, Gold Coast, QLD, Australia, 23–26 June 2013. [Google Scholar]
- Toledo, T.; Koutsopoulos, N.; Ben, M. Estimation of an integrated driving behavior model. Transp. Res. Part C Emerg. Technol. 2009, 17, 365–380. [Google Scholar] [CrossRef]
- Pan, B.-H.; Gao, J.-Q.; Huo, Y.-F. A probability model of interchange vehicle diverging choice behaviors. J. Highw. Transp. Res. Dev. 2017, 34, 115–120. [Google Scholar]
- Wang, C.; Qin, J.-H.; Guo, M.-H. Simulation of lane change control algorithm for intelligent vehicle. Comput. Eng. Des. 2013, 34, 2528–2532. [Google Scholar]
- Feng, Y.; Pei, Y.; Zhang, Y. Calibration of selective lane change model based on close-range photogrammetry. J. Harbin Inst. Technol. 2007, 39, 1292–1296. [Google Scholar]
- Zheng, H.; Rong, J.; Ren, F.-T. A lane changing model based on random utility theory. J. Highw. Transp. Res. Dev. 2004, 21, 88–91. [Google Scholar]
- Guo, H.-B.; Hong, J.-L. Vehicle lane changing interaction behavior and decision model based on utility theory. Sci. Technol. Eng. 2020, 20, 12185–12190. [Google Scholar]
- Wang, C.; Sun, Q.; Li, Z.; Zhang, H. Human-like lane change decision model for autonomous vehicles that considers the risk perception of drivers in mixed traffic. Sensors 2020, 20, 2259. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smirnov, N.; Liu, Y.; Validi, A.; Morales, W. A game theory-based approach for modeling autonomous vehicle behavior in congested, urban lane-changing scenarios. Sensors 2021, 21, 1523. [Google Scholar] [CrossRef]
- Gu, X.; Han, Y.; Yu, J. A novel lane-changing decision model for autonomous vehicles based on deep autoencoder network and XGBoost. IEEE Access 2020, 8, 9846–9863. [Google Scholar] [CrossRef]
- Gao, K. Conditional artificial potential field-based autonomous vehicle safety control with interference of lane changing in mixed traffic scenario. Sensors 2019, 19, 4199. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Yang, Y.; Li, S.; Qu, X. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transp. Res. Part C Emerg. Technol. 2022, 134, 103452. [Google Scholar] [CrossRef]
- Wu, X.; Qiao, B.; Su, C. Trajectory planning with time-variant safety margin for autonomous vehicle lane change. Appl. Sci. 2020, 10, 1626. [Google Scholar] [CrossRef] [Green Version]
- An, H.; Jung, I. Decision-making system for lane change using deep reinforcement learning in connected and automated driving. Electronics 2019, 8, 543. [Google Scholar] [CrossRef] [Green Version]
- Reuschel, A. Vehicle movements in a platoon. Oes. Ing-Atchir. 1950, 4, 193–215. [Google Scholar]
- Peng, T.; Su, L.-L. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles. Expert Syst. Appl. 2020, 141, 112953. [Google Scholar] [CrossRef]
- Baber, J.; Kolodko, J.; Noel, T. Cooperative autonomous driving: Intelligent vehicles sharing city roads. IEEE Robot. Autom. Mag. 2005, 12, 44–49. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.-G. A review of environment sensing technologies for driverless vehicles. China South Agric. Mach. 2019, 50, 23. [Google Scholar]
- Wang, Z. Design and Realization of the Autonomous Vehicle Motion Control System. Master’s Thesis, Chang’an University, Xi’an, China, 2016. [Google Scholar]
- Liu, C.-X. Changing the world-the road to Google’s driverless car development. Auto Rev. 2016, 5, 94–99. [Google Scholar]
- Wang, B.; Han, Y.; Tian, D. Sensor-based environmental perception technology for intelligent vehicles. J. Sensors 2021, 2021, 8199361. [Google Scholar]
- Shahian, B.; Tulabandhula, T.; Cetin, S. Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [Green Version]
- Campbell, S.; O’Mahony, N.; Krpalcova, L.; Riordan, D.; Walsh, J. Sensor Technology in Autonomous Vehicles: A Review. In Proceedings of the 2018 29th Irish Signals and Systems Conference, Belfast, UK, 21–22 June 2018. [Google Scholar]
- Yeong, D.-J.; Velasco, G.; Barry, J.; Walsh, J. Sensor and sensor fusion technology in autonomous vehicles: A review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef]
- Huang, W. Auto-driving car sensor technology industry analysis. Inf. Commun. Technol. Pol. 2018, 8, 40–44. [Google Scholar]
- Wang, A.-W. Present situation and development prospect of auto driving. Agric. Eq. Technol. 2018, 44, 56–57. [Google Scholar]
- Yang, J.-R. Driving Behavior Characteristics and Models under Vehicle-Infrastructure Cooperation. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2019. [Google Scholar]
- Hei, K.-X.; Qu, D.-Y.; Guo, H.-B. Modeling lane-changing behavior in mixed traffic flow connected environment based on game behavior. Sci. Technol. Eng. 2021, 21, 2495–2501. [Google Scholar]
- Wen, C. Coupled Game Theory-Kinematics Decision Making for Automatic Driving Lane Change. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2019. [Google Scholar]
- Yang, L.-H.; Wang, H.; Li, S. Car-following model with improved molecular dynamics. J. Chongqing Univ. 2021, 44, 26–33. [Google Scholar]
- Li, Y.-K.; Liu, Y. Development status and suggestions of domestic intelligent connected vehicles. Aut. Parts 2016, 41, 56–59. [Google Scholar]
- Meng, X. Research on the Simulation of the Weaving Area on the Urban Expressway under the Mixed Traffic Environment. Master’s Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Shi, B.-Y.; Yang, X.-G.; Yu, X.-F. Modeling and simulation of discretionary lane-change considering the combination with the car-following model. J. Transp. Sci. Eng. 2009, 25, 91–96. [Google Scholar]
- Qiu, X.-P.; Ma, L.; Zhou, X.-X.; Yang, D. Study on mixed traffic flow of manual-automatic driving based on safety distance. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 101–108. [Google Scholar]
- Bing, Q.-C. Molecular dynamics characteristics and models of vehicle lane changing interaction behavior. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 68–74. [Google Scholar]
- Liu, C. Car-following characteristics and its models based on molecular dynamics. J. Highw. Transp. Res. Dev. 2018, 35, 126–131. [Google Scholar]
- Erdmann, J. Lane-Changing Model in SUMO. In Proceedings of the SUMO 2014 Modeling Mobility with Open Data, Berlin, Germany, 16 May 2014. [Google Scholar]
- Li, J. Study on Traffic Flow Characteristics and Its Model Based on Molecular Dynamics. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2018. [Google Scholar]
- Yang, J.; Chen, X.-F. Molecular kinetics behavior of car-following and its model. J. Jilin Univ. 2012, 42, 1198–1202. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perception Technology | Advantages | Disadvantages |
|---|---|---|
| Visual perception | Rich information | Susceptible to light and speed Low measurement accuracy of 3D information |
| Good real-time performance | ||
| Low energy consumption | ||
| Laser perception | Obtains 3D distance directly | Inability to perceive target information without distance difference in plane |
| High measurement accuracy | ||
| Insensitive to light changes | ||
| Microwave perception | Obtains 3D distance directly | Inability to perceive target information without distance difference in plane |
| Good real-time performance | ||
| High measurement accuracy |
| Name of Application Tool | Introduction |
|---|---|
| GUISIM | Application of graphic interface in microsimulation |
| NETCONVERT | Reads the road network in different formats and converts it to SUMO format |
| GETGEN | Generates abstract road networks for SUMO simulation |
| DUAROUTER | Calculates the shortest path |
| JTRROUTER | Calculates the path by using the intersection-turning ratio |
| DFROUTER | Calculates the path through the induction coil |
| OD2TRIPS | Obtains the path of a single vehicle |
| POLYCONVERT | Converts to visual content accepted by GUISIM |
| Parameter | Value |
|---|---|
| α | 0.0541 |
| β | 0.0506 |
| μ | 0.0056 |
| Additional Parameter | Range |
|---|---|
| lcSublane | [0–inf) |
| lcStrategic | [0–inf) |
| lcSpeedGain | [0–inf) |
| lcKeepRight | [0–inf) |
| lcCooperative | [0–1] |
| lcPushy | [0–1] |
| lcAssertive | [0–1) |
| lcImpatience | [−1–1] |
| Parameter | SL2015 Lane-Changing Model | Molecular-Dynamics Lane-Changing Model |
|---|---|---|
| Vehicle length (m) | 4.8 | 4.8 |
| Vehicle width (m) | 1.8 | 1.8 |
| Vehicle color | Deep sky blue | Lawn green |
| Maximum speed (m/s) | 33.33 | 33.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, D.; Zhang, K.; Song, H.; Wang, T.; Dai, S. Analysis of Lane-Changing Decision-Making Behavior of Autonomous Vehicles Based on Molecular Dynamics. Sensors 2022, 22, 7748. https://doi.org/10.3390/s22207748
Qu D, Zhang K, Song H, Wang T, Dai S. Analysis of Lane-Changing Decision-Making Behavior of Autonomous Vehicles Based on Molecular Dynamics. Sensors. 2022; 22(20):7748. https://doi.org/10.3390/s22207748
Chicago/Turabian StyleQu, Dayi, Kekun Zhang, Hui Song, Tao Wang, and Shouchen Dai. 2022. "Analysis of Lane-Changing Decision-Making Behavior of Autonomous Vehicles Based on Molecular Dynamics" Sensors 22, no. 20: 7748. https://doi.org/10.3390/s22207748