
Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter

Abstract
:1. Introduction
2. Working Principles of an AIG
3. Influence of Vibration Noise on an AIG
4. Research Status of Vibration Isolation Technology for an AIG
4.1. Passive Vibration Isolation
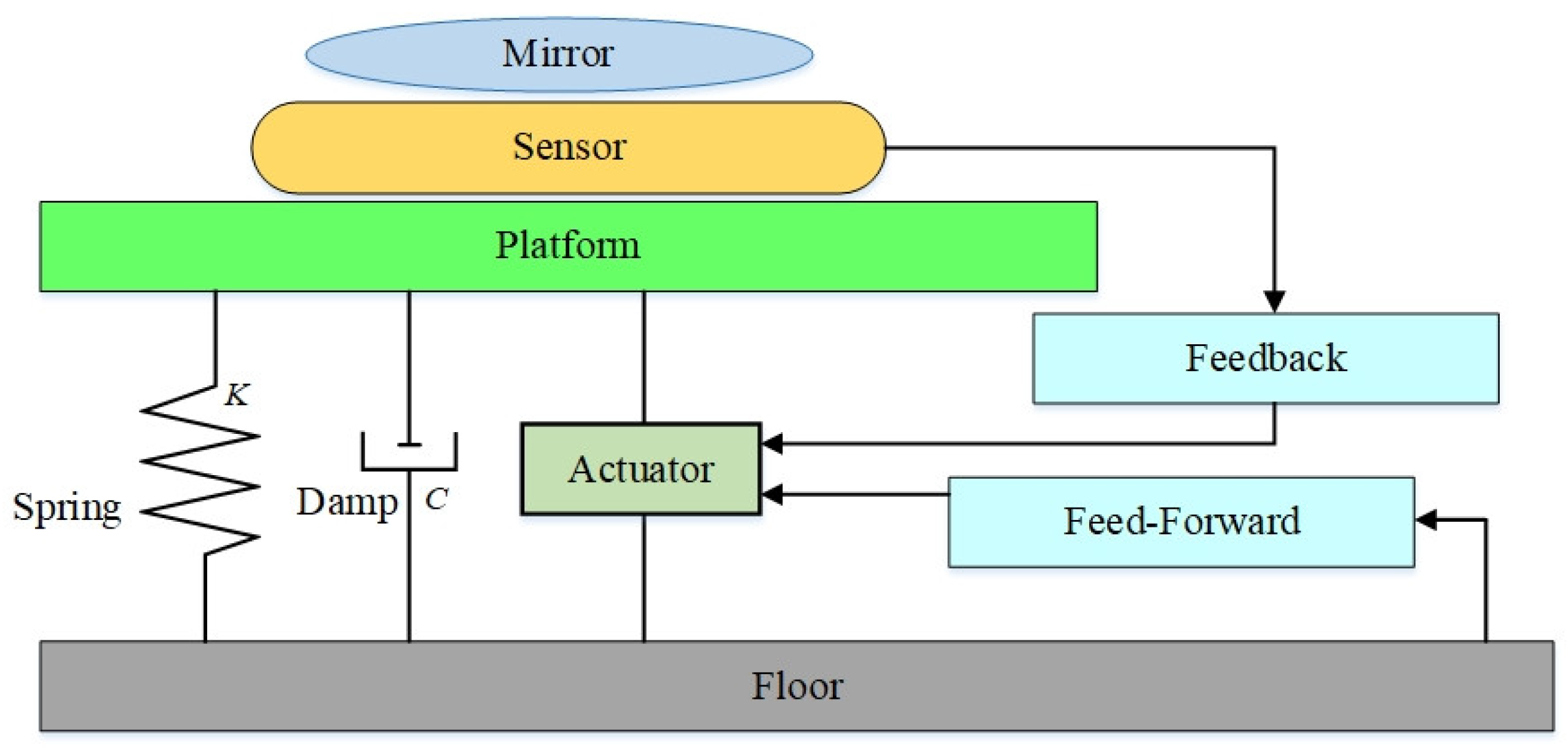
4.2. Active Vibration Isolation
4.3. Vibration Compensation
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheiney, P.; Fouche, L.; Templier, S.; Napolitano, F.; Battelier, B.; Bouyer, P.; Barrett, B. Navigation-Compatible Hybrid Quantum Accelerometer Using a Kalman Filter. Phys. Rev. Appl. 2018, 10, 034030. [Google Scholar] [CrossRef] [Green Version]
- Welker, T.C.; Pachter, M.; Huffman, R.E. Gravity gradiometer integrated inertial navigation. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 846–851. [Google Scholar]
- Bong, K.; Holynski, M.; Vovrosh, J.; Bouyer, P.; Condon, G.; Rasel, E.; Schubert, C.; Schleich, W.P.; Roura, A. Taking atom interferometric quantum sensors from the laboratory to real-world applications. Nat. Rev. Phys. 2019, 1, 731–739. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.B.; Yang, P.X.; Huang, P.; Sun, H.X.; Ying, W.W. Wide-bandwidth signal-based multireceiver SAS imagery using extended chirp scaling algorithm. IET Radar Sonar Navig. 2021, 1–11. [Google Scholar] [CrossRef]
- Gong, W.B.; Shi, Z.S.; Wu, Z.H.; Luo, J.R. Arbitrary-Oriented Ship Detection via Feature Fusion and Visual Attention for High-Resolution Optical Remote Sensing Imagery. Int. J. Remote Sens. 2021, 42, 2622–2640. [Google Scholar] [CrossRef]
- Zhang, X.B.; Wu, H.R.; Sun, H.X.; Ying, W.W. Multireceiver SAS Imagery Based on Monostatic Conversion. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 10835–10853. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P. An Improved Imaging Algorithm for Multi-Receiver SAS System with Wide-Bandwidth Signal. Remote Sens. 2021, 13, 5008. [Google Scholar] [CrossRef]
- Musso, C.; Bresson, A.; Bidel, Y.; Zahzam, N.; Dahia, K.; Allard, J.-M.; Sacleux, B. Absolute gravimeter for terrain-aided navigation. In Proceedings of the 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017; pp. 1326–1332. [Google Scholar]
- Zhang, X.B.; Ying, W.W.; Yang, P.X.; Sun, M. Parameter estimation of underwater impulsive noise with the Class B model. Iet Radar Sonar Navig. 2020, 14, 1055–1060. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Atomic interferometry using stimulated Raman transitions. Phys. Rev. Lett. 1991, 67, 181–184. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Measurement of the gravitational acceleration of an atom with a light-pulse atom interferometer. Appl. Phys. B 1992, 54, 321–332. [Google Scholar] [CrossRef]
- Peters, A.; Chung, K.Y.; Chu, S. Measurement of gravitational acceleration by dropping atoms. Nature 1999, 400, 849–852. [Google Scholar] [CrossRef]
- Gillot, P.; Cheng, B.; Imanaliev, A.; Merlet, S.; Santos, F.P.D. The LNE-SYRTE cold atom gravimeter. In Proceedings of the 2016 European Frequency and Time Forum (EFTF), York, UK, 4–7 April 2016; pp. 1–3. [Google Scholar]
- Merlet, S.; Karcher, R.; Imanaliev, A.; Dos Santos, F.P. Ultracold Atom Gravimeter. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements, Paris, France, 8–13 July 2018. [Google Scholar]
- Le Gouët, J.; Mehlstäubler, T.E.; Kim, J.; Merlet, S.; Clairon, A.; Landragin, A.; Pereira Dos Santos, F. Limits to the sensitivity of a low noise compact atomic gravimeter. Appl. Phys. B 2008, 92, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Hauth, M.; Freier, C.; Schkolnik, V.; Senger, A.; Schmidt, M.; Peters, A. First gravity measurements using the mobile atom interferometer GAIN. Appl. Phys. B 2013, 113, 49–55. [Google Scholar] [CrossRef]
- Freier, C.; Hauth, M.; Schkolnik, V.; Leykauf, B.; Schilling, M.; Wziontek, H.; Scherneck, H.-G.; Müller, J.; Peters, A. Mobile quantum gravity sensor with unprecedented stability. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2016; p. 012050. [Google Scholar]
- Peters, A.; Chung, K.Y.; Chu, S. High-precision gravity measurements using atom interferometry. Metrologia 2001, 38, 25–61. [Google Scholar] [CrossRef]
- Fu, Z.; Wu, B.; Cheng, B.; Zhou, Y.; Weng, K.; Zhu, D.; Wang, Z.; Lin, Q. A new type of compact gravimeter for long-term absolute gravity monitoring. Metrologia 2019, 56, 025001. [Google Scholar] [CrossRef]
- Bin, W.; Yin, Z.; Bing, C.; Dong, Z.; Nan, W.K.; Xin, Z.X.; Jun, C.P.; Xing, W.K.; Hai, Y.Q.; Hong, L.J.; et al. Static measurement of absolute gravity in truck based on atomic gravimeter. Acta Phys. Sin. 2020, 69, 25–32. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Chen, L.L.; Cheng, Y.; Luo, Q.; Shu, Y.B.; Duan, X.C.; Zhou, M.K.; Hu, Z.K. Movable precision gravimeters based on cold atom interferometry. Chin. Phys. B 2020, 29, 88–96. [Google Scholar] [CrossRef]
- Zhou, M.-K.; Hu, Z.-K.; Duan, X.-C.; Sun, B.-L.; Chen, L.-L.; Zhang, Q.-Z.; Luo, J. Performance of a cold-atom gravimeter with an active vibration isolator. Phys. Rev. A 2012, 86, 043630. [Google Scholar] [CrossRef]
- Xie, H.T.; Chen, B.; Long, J.B.; Xue, C.; Chen, L.K.; Chen, S. Calibration of a compact absolute atomic gravimeter. Chin. Phys. B 2020, 29, 093701. [Google Scholar] [CrossRef]
- Jin, W. Precision measurement with atom interferometry. Chin. Phys. B 2015, 24, 053702. [Google Scholar] [CrossRef]
- Zhou, L.; Xiong, Z.-Y.; Yang, W.; Tang, B.; Peng, W.-C.; Wang, Y.-B.; Xu, P.; Wang, J.; Zhan, M.-S. Measurement of Local Gravity via a Cold Atom Interferometer. Chin. Phys. Lett. 2011, 28, 013701. [Google Scholar] [CrossRef]
- Geiger, R.; Landragin, A.; Merlet, S.; Santos, F.P.D. High-accuracy inertial measurements with cold-atom sensors. AVS Quantum Sci. 2020, 2, 024702. [Google Scholar] [CrossRef]
- Cooke, A.K.; Champollion, C.; Le Moigne, N. First evaluation of an absolute quantum gravimeter (AQG#B01) for future field experiments. Geosci. Instrum. Method. Data Syst. 2021, 10, 65–79. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, Y.; Weng, K.; Cheng, B.; Wu, B.; Lin, Q.; Hu, Z. The gravity estimation with square-root unscented Kalman filter in the cold atom gravimeter. Eur. Phys. J. D 2020, 74, 147. [Google Scholar] [CrossRef]
- Wu, X.; Weiner, S.; Pagel, Z.; Malek, B.S.; Muller, H. Mobile quantum gravimeter with a novel pyramidal magneto-optical trap. In Proceedings of the Conference on Lasers and Electro-Optics, Washington, DC, USA, 10–15 May 2020; p. JW2C.5. [Google Scholar]
- Chen, B.; Long, J.; Xie, H.; Li, C.; Chen, L.; Jiang, B.; Chen, S. Portable atomic gravimeter operating in noisy urban environments. Chin. Opt. Lett. 2020, 18, 12–17. [Google Scholar] [CrossRef]
- Wang, S.-K.; Zhao, Y.; Zhuang, W.; Li, T.-C.; Wu, S.-Q.; Feng, J.-Y.; Li, C.-J. Shift evaluation of the atomic gravimeter NIM-AGRb-1 and its comparison with FG5X. Metrologia 2018, 55, 360–365. [Google Scholar] [CrossRef]
- Wu, X.; Pagel, Z.; Malek, B.S.; Nguyen, T.H.; Zi, F.; Scheirer, D.S.; Müller, H. Gravity surveys using a mobile atom interferometer. Sci. Adv. 2019, 5, eaax0800. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bing, C.; Yin, Z.; Jun, C.P.; Jun, Z.K.; Dong, Z.; Nan, W.K.; Xing, W.K.; Lin, W.H.; Ping, P.S.; Long, W.X.; et al. Absolute gravity measurement based on atomic gravimeter under mooring state of a ship. Acta Phys. Sin. 2021, 70, 040304. [Google Scholar] [CrossRef]
- Desruelle, B.; Vermeulen, P.; Menoret, V.; Landragin, A.; Bouyer, P.; Le Moigne, N.; Gabalda, G.; Bonvalot, S. Sub µGal Absolute Gravity Measurements with a Transportable Quantum Gravimeter. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 11–15 December 2017; p. G54A-05. [Google Scholar]
- Menoret, V.; Vermeulen, P.; Le Moigne, N.; Bonvalot, S.; Bouyer, P.; Landragin, A.; Desruelle, B. Gravity measurements below 10(-9) g with a transportable absolute quantum gravimeter. Sci. Rep. 2018, 8, 12300. [Google Scholar] [CrossRef]
- Bidel, Y.; Carraz, O.; Charriere, R.; Cadoret, M.; Zahzam, N.; Bresson, A. Compact cold atom gravimeter for field applications. Appl. Phys. Lett. 2013, 102, 144107. [Google Scholar] [CrossRef]
- Bidel, Y.; Zahzam, N.; Blanchard, C.; Bonnin, A.; Cadoret, M.; Bresson, A.; Rouxel, D.; Lequentrec-Lalancette, M.F. Absolute marine gravimetry with matter-wave interferometry. Nat. Commun. 2018, 9, 9. [Google Scholar] [CrossRef]
- Bidel, Y.; Zahzam, N.; Bresson, A.; Blanchard, C.; Cadoret, M.; Olesen, A.V.; Forsberg, R. Absolute airborne gravimetry with a cold atom sensor. J. Geod. 2020, 94, 20. [Google Scholar] [CrossRef] [Green Version]
- Müller, H.; Chiow, S.W.; Herrmann, S.; Chu, S.; Chung, K.Y. Atom-interferometry tests of the isotropy of post-Newtonian gravity. Phys. Rev. Lett. 2008, 100, 031101. [Google Scholar] [CrossRef] [Green Version]
- Rosi, G.; Sorrentino, F.; Cacciapuoti, L.; Prevedelli, M.; Tino, G.M. Precision measurement of the Newtonian gravitational constant using cold atoms. Nature 2014, 510, 518–521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Altin, P.A.; Johnsson, M.T.; Negnevitsky, V.; Dennis, G.R.; Anderson, R.P.; Debs, J.E.; Szigeti, S.S.; Hardman, K.S.; Bennetts, S.; McDonald, G.D.; et al. Precision atomic gravimeter based on Bragg diffraction. New J. Phys. 2013, 15, 023009. [Google Scholar] [CrossRef]
- Hu, Z.-K.; Sun, B.-L.; Duan, X.-C.; Zhou, M.-K.; Chen, L.-L.; Zhan, S.; Zhang, Q.-Z.; Luo, J. Demonstration of an ultrahigh-sensitivity atom-interferometry absolute gravimeter. Phys. Rev. A 2013, 88, 043610. [Google Scholar] [CrossRef]
- Luo, Q.; Zhang, H.; Zhang, K.; Duan, X.-C.; Hu, Z.-K.; Chen, L.-L.; Zhou, M.-K. A compact laser system for a portable atom interferometry gravimeter. Rev. Sci. Instrum. 2019, 90, 043104. [Google Scholar] [CrossRef]
- Wu, B.; Wang, Z.; Cheng, B.; Wang, Q.; Xu, A.; Lin, Q. The investigation of a μGal-level cold atom gravimeter for field applications. Metrologia 2014, 51, 452–458. [Google Scholar] [CrossRef]
- Huang, P.W.; Tang, B.; Chen, X.; Zhong, J.Q.; Xiong, Z.Y.; Zhou, L.; Wang, J.; Zhan, M.S. Accuracy and stability evaluation of the Rb-85 atom gravimeter WAG-H5-1 at the 2017 International Comparison of Absolute Gravimeters. Metrologia 2019, 56, 7. [Google Scholar] [CrossRef]
- Shuqing, W.; Tianchu, L. Technical Development of Absolute Gravimeter: Laser Interferometry and Atom Interferometry. Acta Opt. Sin. 2021, 41, 44–59. [Google Scholar] [CrossRef]
- Tino, G.M. Testing gravity with cold atom interferometry: Results and prospects. Quantum Sci. Technol. 2021, 6, 024014. [Google Scholar] [CrossRef]
- Savoie, D.; Altorio, M.; Fang, B.; Sidorenkov, L.A.; Geiger, R.; Landragin, A. Interleaved atom interferometry for high-sensitivity inertial measurements. Sci. Adv. 2018, 4, eaau7948. [Google Scholar] [CrossRef] [Green Version]
- Musso, C.; Sacleux, B.; Bresson, A.; Allard, J.M.; Dahia, K.; Bidel, Y.; Zahzam, N.; Palmier, C. Terrain-aided navigation with an atomic gravimeter. In Proceedings of the 22nd International Conference on Information Fusion, Ottawa, ON, Canada, 2–5 July 2019. [Google Scholar]
- Battelier, B.; Barrett, B.; Fouché, L.; Chichet, L.; Antoni-Micollier, L.; Porte, H.; Napolitano, F.; Lautier, J.; Landragin, A.; Bouyer, P. Development of compact cold-atom sensors for inertial navigation. In Quantum Optics; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; p. 990004. [Google Scholar]
- Rice, H.F.; Benischek, V.; Sczaniecki, L. Application of Atom Interferometric Technology For GPS Independent Navigation and Time Solutions. In Proceedings of the 2018 IEEE/Ion Position, Location And Navigation Symposium, Monterey, CA, USA, 23–26 April 2018; pp. 1097–1106. [Google Scholar]
- Richardson, L.L. Inertial Noise Post-Correction in Atom Interferometers Measuring the Local Gravitational Acceleration. Ph.D. Dissertation, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2019. [Google Scholar]
- Lee, D.-H.; Kim, Y.-B.; Chakir, S.; Huynh, T.; Park, H.-C. Noninteracting Control Design for 6-DoF Active Vibration Isolation Table with LMI Approach. Appl. Sci. 2021, 11, 7693. [Google Scholar] [CrossRef]
- Wu, K.; Li, G.; Hu, H.; Wang, L. Active low-frequency vertical vibration isolation system for precision measurements. Chin. J. Mech. Eng. 2017, 30, 164–169. [Google Scholar] [CrossRef]
- Wu, Q.; Teng, Y.; Wang, X.; Wu, Y.; Zhang, Y. Vibration error compensation algorithm in the development of laser interference absolute gravimeters. Geosci. Instrum. Method. Data Syst. 2021, 10, 113–122. [Google Scholar] [CrossRef]
- Yao, J.; Wu, K.; Guo, M.; Wang, L. Improvement of the ultra-low-frequency active vertical vibration isolator with geometric anti-spring structure for absolute gravimetry. Rev. Sci. Instrum. 2021, 92, 054503. [Google Scholar] [CrossRef] [PubMed]
- Wen, Y.; Wu, K.; Guo, M.; Wang, L. An Optimized Vibration Correction Method for Absolute Gravimetry. IEEE Trans. Instrum. Meas. 2021, 70, 1003607. [Google Scholar] [CrossRef]
- Yao, J.; Wu, K.; Guo, M.; Wang, G.; Wang, L. An Ultralow-Frequency Active Vertical Vibration Isolator With Geometric Antispring Structure for Absolute Gravimetry. IEEE Trans. Instrum. Meas. 2020, 69, 2670–2677. [Google Scholar] [CrossRef]
- Wang, G.; Wu, K.; Hu, H.; Li, G.; Wang, L.J. Ultra-low-frequency vertical vibration isolator based on a two-stage beam structure for absolute gravimetry. Rev. Sci. Instrum. 2016, 87, 7. [Google Scholar] [CrossRef]
- Wang, G.; Hu, H.; Wu, K.; Wang, L.J. Correction of vibration for classical free-fall gravimeters with correlation-analysis. Meas. Sci. Technol. 2017, 28, 6. [Google Scholar] [CrossRef]
- Jipeng, W.; Dong, H.; Jinhai, B.; Hao, G. Review on Vibration Isolation Method of Atom-interferometric Gravimeter. Metrol. Meas. Technol. 2020, 40, 15–20. [Google Scholar] [CrossRef]
- Aopeng, X.; Delong, K.; Zhijie, F.; Zhaoying, W.; Qiang, L. Vibration compensation of an atom gravimeter. Chin. Opt. Lett. 2019, 17, 070201. [Google Scholar] [CrossRef]
- Cheinet, P.; Canuel, B.; Dos Santos, F.P.; Gauguet, A.; Yver-Leduc, F.; Landragin, A. Measurement of the sensitivity function in a time-domain atomic interferometer. IEEE Trans. Instrum. Meas. 2008, 57, 1141–1148. [Google Scholar] [CrossRef] [Green Version]
- LeLe, C.; Qin, L.; XiaoBing, D.; YuJie, T.; DeKai, M.; Heng, Z.; MinKang, Z.; XiaoChun, D.; ChengGang, S.; ZhongKun, H. Precision gravity measurements with cold atom interferometer. Sci. Sin.-Phys. Mech. Astron. 2016, 46, 21–38. [Google Scholar] [CrossRef] [Green Version]
- Weiner, S.; Wu, X.; Pagel, Z.; Li, D.; Sleczkowski, J.; Ketcham, F.; Mueller, H. A Flight Capable Atomic Gravity Gradiometer With a Single Laser. In Proceedings of the 7th IEEE International Symposium on Inertial Sensors and Systems, Hiroshima, Japan, 23–26 March 2020. [Google Scholar]
- Ming-Sheng, Z. Progress in laser manipulating single neutral atoms. Physics 2015, 44, 518–526. [Google Scholar] [CrossRef]
- Jin, W.; Xiaojun, L.; Jiaomei, L.; Hongtai, Z.; Kaijun, J.; Mingsheng, Z. Laser Trapping of Rubidium Atoms. Acta Opt. Sin. 2000, 20, 862–864. [Google Scholar]
- Carraz, O.; Lienhart, F.; Charriere, R.; Cadoret, M.; Zahzam, N.; Bidel, Y.; Bresson, A. Compact and robust laser system for onboard atom interferometry. Appl. Phys. B-Lasers Opt. 2009, 97, 405–411. [Google Scholar] [CrossRef]
- Zhijie, F.; Qiyu, W.; Zhaoying, W.; Bin, W.; Bing, C.; Qiang, L. Participation in the absolute gravity comparison with a compact cold atom gravimeter. Chin. Opt. Lett. 2019, 17, 011204. [Google Scholar] [CrossRef]
- Dong, X.; Jin, S.; Shui, H.; Peng, P.; Zhou, X. Improve the performance of interferometer with ultra-cold atoms. Chin. Phys. B 2021, 30, 58–71. [Google Scholar] [CrossRef]
- Zhang, X.B.; Huang, H.; Ying, W.W.; Wang, H.K.; Xiao, J. An Indirect Range-Doppler Algorithm for Multireceiver Synthetic Aperture Sonar Based on Lagrange Inversion Theorem. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3572–3587. [Google Scholar] [CrossRef]
- Tang, B. Experimental Investigation of Active Vibration Isolation System for High Precision Cold Atom Interferometers; Wuhan Institute of Physics and Mathematics Chinese Academy of Sciences: Wuhan, China, 2014. [Google Scholar]
- Aleynikov, M.S.; Baryshev, V.N.; Blinov, I.Y.; Kupalov, D.S.; Osipenko, G.V. Prospects for the Development of a Sensitive Atomic Interferometer Based on Cold Rubidium Atoms. Meas. Tech. 2020, 63, 520–523. [Google Scholar] [CrossRef]
- Fang, B.; Dutta, I.; Gillot, P.; Savoie, D.; Lautier, J.; Cheng, B.; Garrido Alzar, C.L.; Geiger, R.; Merlet, S.; Pereira Dos Santos, F.; et al. Metrology with Atom Interferometry: Inertial Sensors from Laboratory to Field Applications. J. Phys. Conf. Ser. 2016, 723, 012049. [Google Scholar] [CrossRef] [Green Version]
- Erin, C.; Wilson, B.; Zapfe, J. An improved model of a pneumatic vibration isolator: Theory and experiment. J. Sound Vib. 1998, 218, 81–101. [Google Scholar] [CrossRef]
- Li, G.; Hu, H.; Wu, K.; Wang, G.; Wang, L.J. Ultra-low frequency vertical vibration isolator based on LaCoste spring linkage. Rev. Sci. Instrum. 2014, 85, 104502. [Google Scholar] [CrossRef]
- Mizuno, T.; Toumiya, T.; Takasaki, M. Vibration isolation system using negative stiffness. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2003, 46, 807–812. [Google Scholar] [CrossRef] [Green Version]
- Platus, D.L. Negative-stiffness-mechanism vibration isolation systems. In Proceedings of the Vibration Control in Microelectronics, Optics, and Metrology, San Jose, CA, USA, 1 February 1992; pp. 44–54. [Google Scholar]
- Li, H.; Li, Y.; Li, J. Negative stiffness devices for vibration isolation applications: A review. Adv. Struct. Eng. 2020, 23, 1739–1755. [Google Scholar] [CrossRef]
- D’Agostino, G.; Desogus, S.; Germak, A.; Origlia, C. The new IMGC-02 transportable absolute gravimeter: Measurement apparatus and applications in geophysics and volcanology. Ann. Geophys. 2008, 51, 39–49. [Google Scholar] [CrossRef]
- Berrino, G. The state of the art of gravimetry in Italy. Rend. Lincei. Sci. Fis. E Nat. 2020, 31, 35–48. [Google Scholar] [CrossRef]
- Bazinenkov, A.M.; Mikhailov, V.P. Active and Semi Active Vibration Isolation Systems Based on Magnetorheological Materials. Procedia Eng. 2015, 106, 170–174. [Google Scholar] [CrossRef] [Green Version]
- Verma, M.; Collette, C. Active Vibration Isolation System for Drone Cameras. In Proceedings of the 14th International Conference on Vibration Problems, Crete, Greece, 1–4 September 2019; 2021; pp. 1067–1084. [Google Scholar]
- Aggogeri, F.; Merlo, A.; Pellegrini, N. Active vibration control development in ultra-precision machining. J. Vib. Control 2021, 27, 790–801. [Google Scholar] [CrossRef]
- Guo, M.; Wu, K.; Yao, J.; Wen, Y.; Wang, L. A Vertical Seismometer With Built-In Retroreflector for Absolute Gravimetry. IEEE Trans. Instrum. Meas. 2021, 70, 1004310. [Google Scholar] [CrossRef]
- Hensley, J.M.; Peters, A.; Chu, S. Active low frequency vertical vibration isolation. Rev. Sci. Instrum. 1999, 70, 2735–2741. [Google Scholar] [CrossRef]
- Freier, C. Measurement of Local Gravity Using Atom Interferometry. Ph.D. Thesis, Humboldt-Universität zu Berlin, Berlin, Germany, 2010. [Google Scholar]
- Schmidt, M.; Senger, A.; Hauth, M.; Freier, C.; Schkolnik, V.; Peters, A. A mobile high-precision absolute gravimeter based on atom interferometry. Gyroscopy Navig. 2011, 2, 170. [Google Scholar] [CrossRef]
- Zhou, M.-K.; Xiong, X.; Chen, L.-L.; Cui, J.-F.; Duan, X.-C.; Hu, Z.-K. Note: A three-dimension active vibration isolator for precision atom gravimeters. Rev. Sci. Instrum. 2015, 86, 046108. [Google Scholar] [CrossRef]
- Tang, B.; Zhou, L.; Xiong, Z.; Wang, J.; Zhan, M. A programmable broadband low frequency active vibration isolation system for atom interferometry. Rev. Sci. Instrum. 2014, 85, 093109. [Google Scholar] [CrossRef] [PubMed]
- Luo, D.-Y.; Cheng, B.; Zhou, Y.; Wu, B.; Wang, X.-L.; Lin, Q. Ultra-low frequency active vibration control for cold atom gravimeter based on sliding-mode robust algorithm. Acta Phys. Sin. 2018, 67, 82–87. [Google Scholar] [CrossRef]
- Bin, C.; Bao, L.J.; Tai, X.H.; Kan, C.L.; Shuai, C. A mobile three-dimensional active vibration isolator and its application to cold atom interferometry. Acta Phys. Sin. 2019, 68, 117–125. [Google Scholar] [CrossRef]
- Zhang, N.; Hu, Q.; Wang, Q.; Ji, Q.; Zhao, W.; Wei, R.; Wang, Y. Michelson laser interferometer-based vibration noise contribution measurement method for cold atom interferometry gravimeter. Chin. Phys. B 2020, 29, 70601. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, D.; Wu, B.; Cheng, B.; Lin, Q. Active vibration isolation system based on the LADRC algorithm for atom interferometry. Appl. Opt. 2020, 59, 3487–3493. [Google Scholar] [CrossRef]
- Weng, K.; Zhou, Y.; Zhu, D.; Wang, K.; Wu, B.; Cheng, B.; Lin, Q. High-accuracy gravity measurement with miniaturized quantum gravimeter. Sci. Sin. Phys. Mech. Astron. 2021, 51, 074204. [Google Scholar] [CrossRef]
- Xie, H.T.; Chen, B.; Long, J.B.; Xue, C.; Chen, L.K.; Chen, S. Tilt adjustment for a portable absolute atomic gravimeter. Chin. Phys. B 2020, 29, 73701. [Google Scholar] [CrossRef]
- Merlet, S.; Le Gouët, J.; Bodart, Q.; Clairon, A.; Landragin, A.; Pereira Dos Santos, F.; Rouchon, P. Operating an atom interferometer beyond its linear range. Metrologia 2009, 46, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Le Gouët, J. Étude des Performances d’Un Gravimètre Atomique Absolu: Sensibilité Limite et Exactitude Préliminaire. Ph.D. Dissertation, Université Paris Sud-Paris XI, Orsay, France, 2008. [Google Scholar]
- Barrett, B.; Antoni-Micollier, L.; Chichet, L.; Battelier, B.; Lévèque, T.; Landragin, A.; Bouyer, P. Dual matter-wave inertial sensors in weightlessness. Nat. Commun. 2016, 7, 13786. [Google Scholar] [CrossRef] [PubMed]
- Lautier, J.; Volodimer, L.; Hardin, T.; Merlet, S.; Lours, M.; Dos Santos, F.P.; Landragin, A. Hybridizing matter-wave and classical accelerometers. Appl. Phys. Lett. 2014, 105, 144102. [Google Scholar] [CrossRef]
- An, L.; Hao, C.; Fangjun, Q.; Chunfu, H.; Wenbin, G. Development and prospect of cold atom interferometry gravimetry measurement. J. Nav. Univ. Eng. 2021, 33, 1–7. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Institution | Interrogation Time | Sensitivity | References |
|---|---|---|---|---|
| 2001 | Stanford | Peters et al. [18] | ||
| 2008 | Stanford | Holger Müller [39] | ||
| 2019 | University of California | Wu et al. [32] | ||
| 2008 | LNE-SYRTE | Le Gouët J et al. [15] | ||
| 2013 | ONERA | Bidel et al. [36] | ||
| 2018 | Muquans | Menoret et al. [35] | ||
| 2014 | LENS | Rosi et al. [40] | ||
| 2013 | Humboldt University | 260 s | Hauth et al. [16] | |
| 2016 | Humboldt University | Freier et al. [17] | ||
| 2013 | ANU | Altin et al. [41] | ||
| 2013 | HUST | Hu et al. [42] | ||
| 2019 | HUST | Luo et al. [43] | ||
| 2014 | Zhejiang University | Wu et al. [44] | ||
| 2018 | National Institute of Metrology | Wang et al. [31] | ||
| 2019 | ZJUT | Fu et al. [19] | ||
| 2019 | WIPM | Huang et al. [45] |
| Methods | Previous Studies | Advantages | Disadvantages |
|---|---|---|---|
| Passive vibration isolation based | Li et al. [76] Refs. [80,81] Wu et al. [32] | It does not require external energy, sensor, actuator or control system, and can achieve the greatest vibration isolation with a simple structure. | It has very poor performance for the resonance and vibration isolation at low frequency bands, needs a very long stabilization time, and is poorly operable. |
| Active vibration isolation based | Hensley J. M. et al. [86] Freier [87] M. Schmidt et al. [88] M. Hauth et al. [16] Zhou et al. [22] Zhou et al. [89] Tang et al. [90] Luo et al. [91] Chen et al. [92] Zhang et al. [93] Zhou et al. [94] | It may generate lower resonance frequency, better vibration suppression effect, and realize the high precision of static measurement. | It has a complex system structural design, is difficult to eliminate own noise, and offers the low precision of dynamic measurement. |
| Vibration compensation based | S Merlet et al. [97] Refs. [15,98] Brynle Barrett et al. [99] Menoret, V. et al. [35] Lautier et al. [100] Logan Latham Richardson [52] Xu et al. [62] Cheng et al. [33] Li et al. [101] | It can effectively isolate vibration at all frequency bands, be strongly resistant to disturbance, adapt to the harsh field environment in applications, and meet the needs for small and movable atomic gravimeters in applications. | It causes a heavy computing workload, and is difficult to determine the transfer function between the measuring device and equipment, and to achieve high precision vibration isolation. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, W.; Li, A.; Huang, C.; Che, H.; Feng, C.; Qin, F. Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter. Sensors 2022, 22, 583. https://doi.org/10.3390/s22020583
Gong W, Li A, Huang C, Che H, Feng C, Qin F. Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter. Sensors. 2022; 22(2):583. https://doi.org/10.3390/s22020583
Chicago/Turabian StyleGong, Wenbin, An Li, Chunfu Huang, Hao Che, Chengxu Feng, and Fangjun Qin. 2022. "Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter" Sensors 22, no. 2: 583. https://doi.org/10.3390/s22020583