

Towards an Automated Approach for Monitoring Tree Phenology Using Vehicle Dashcams in Urban Environments



Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Capture
2.2. Automatic Detection of Roadside Trees at Different Phenological Stages
2.3. Image Post-Processing and Calculation of Phenological Metrics
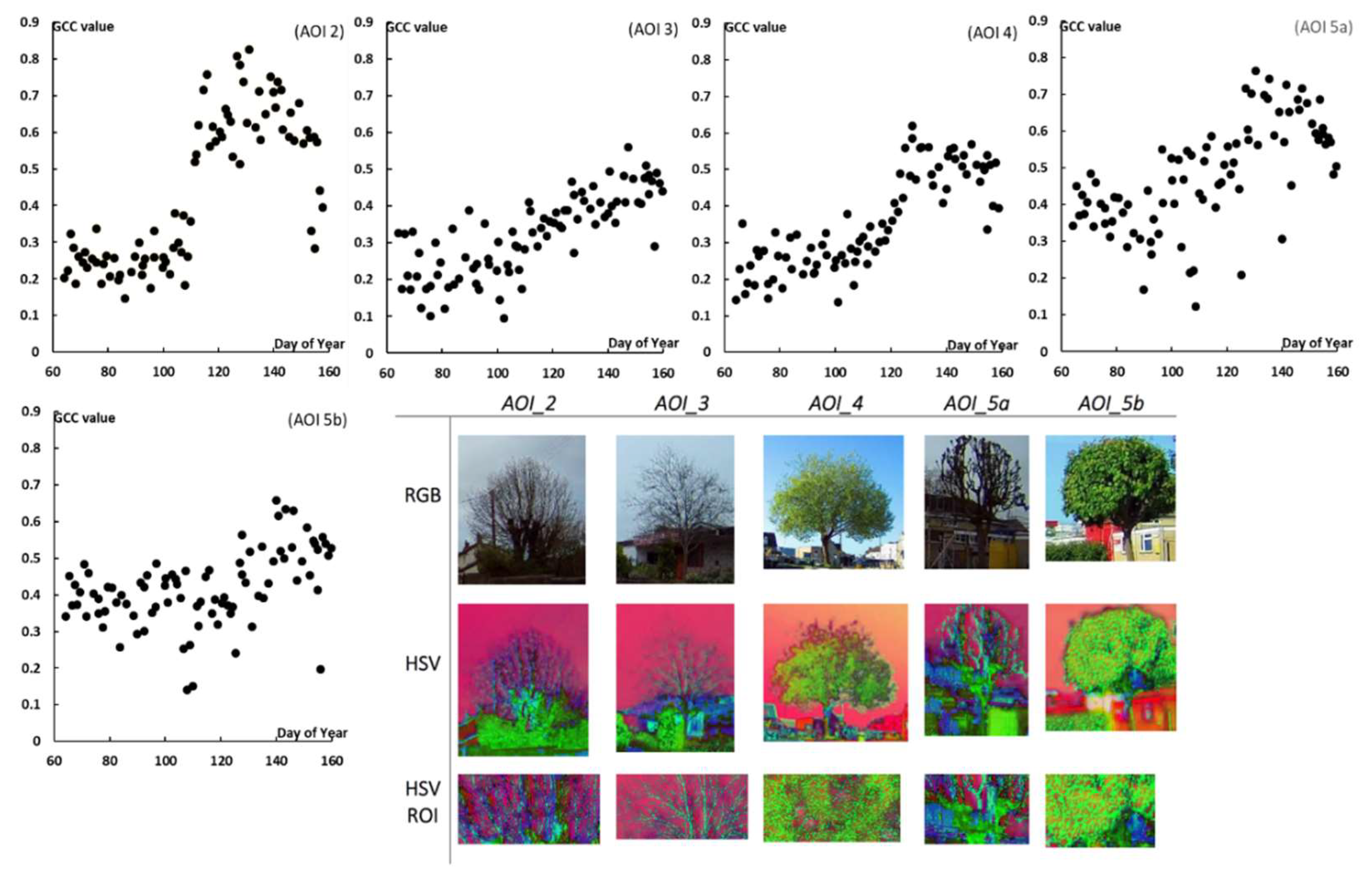
3. Results
Tree Detection Evaluation Metrics
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Meng, L. Green with phenology. Science 2020, 374, 1065–1066. [Google Scholar] [CrossRef]
- Mullaney, J.; Lucke, T.; Trueman, S.J. A review of benefits and challenges in growing street trees in paved urban environments. Landsc. Urban Plan. 2015, 134, 157–166. [Google Scholar] [CrossRef]
- Wolf, K.L.; Lam, S.T.; McKeen, J.K.; Richardson, G.R.A.; van den Bosch, M.; Bardekjian, A.C. Urban trees and human health: A scoping review. Int. J. Environ. Res. Public Health 2020, 17, 4371. [Google Scholar] [CrossRef] [PubMed]
- United Nations. Department of Economic and Social Affairs. In World Urbanisation Prospects; United Nations: New York, NY, USA, 2019. [Google Scholar]
- Wood, S.L.R.; Jones, S.K.; Johnson, J.A.; Brauman, K.A.; Chaplin-Kramer, R.; Fremier, A.; Girvetz, E.; Gordon, L.J.; Kappel, C.V.; Mandle, L.; et al. Distilling the role of ecosystem services in the Sustainable Development Goals. Ecosyst. Serv. 2018, 29, 70–82. [Google Scholar] [CrossRef] [Green Version]
- Dallimer, M.; Tang, Z.; Gaston, K.J.; Davies, Z.G. The extent of shifts in vegetation phenology between rural and urban areas within a human-dominated region. Ecol. Evol. 2016, 6, 1942–1953. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yuyu, Z.; Asrar, G.; Mao, J.; Li, X.; Li, W. Response of vegetation phenology to urbanization in the conterminous United States. Glob. Chang. Biol. 2017, 23, 2818–2830. [Google Scholar] [CrossRef]
- Richardson, A.D.; Jenkins, J.P.; Braswell, B.H.; Hollinger, D.Y.; Ollinger, S.V.; Smith, M.L. Use of digital webcam images to track spring green-up in a deciduous broadleaf forest. Oecologia 2007, 152, 323–334. [Google Scholar] [CrossRef]
- Morris, D.E.; Boyd, D.S.; Crowe, J.A.; Johnson, C.S.; Smith, K.L. Exploring the potential for automatic extraction of vegetation phenological metrics from traffic webcams. Remote Sens. 2013, 5, 2200–2218. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Song, G.; Liujun, Z.; Yanan, Z.; Di, L. Urban vegetation phenology analysis using high spatio-temporal NDVI time series. Urban For. Urban Green. 2017, 25, 43–57. [Google Scholar] [CrossRef]
- Moon, M.; Richardson, A.D.; Milliman, T.; Friedl, M.A. A high spatial resolution land surface phenology dataset for AmeriFlux and NEON sites. Sci. Data 2022, 9, 448. [Google Scholar] [CrossRef] [PubMed]
- Jaeger, D.M.; Looze, A.C.M.; Raleigh, M.S.; Miller, B.W.; Friedman, J.-M.; Wessman, C.A. From flowering to foliage: Accelerometers track tree sway to provide high-resolution insights into tree phenology. Agric. For. Meteorol. 2022, 318, 108900. [Google Scholar] [CrossRef]
- Park, J.Y.; Muller-Landau, H.C.; Lichstein, J.W.; Rifai, S.W.; Dandois, J.P.; Bohlman, S.A. Quantifying leaf phenology of individual trees and species in a tropical forest using unmanned aerial vehicle (UAV) images. Remote Sens. 2019, 11, 1534. [Google Scholar] [CrossRef] [Green Version]
- Thapa, S.; Garcia Millan, V.E.; Eklundh, L. Assessing forest phenology: A multi-scale comparison of near-surface (UAV, spectral reflectance sensor, phenocam) and satellite (MODIS, SENTINEL-2) remote sensing. Remote Sens. 2021, 13, 1597. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Padilla, R.; Netto, S.L.; da Silva, E.A. A Survey on Performance Metrics for Object-Detection Algorithms. In Proceedings of the 2020 International Conference on Systems, Signals and Image Processing (IWSSIP), Niteroi, Brazil, 1–3 July 2020; pp. 237–242. [Google Scholar]
- Yang, W.; Wang, S.; Zhao, X.; Zhang, J.; Feng, J. Greenness identification based on HSV decision tree. Inf. Process. Agric. 2015, 2, 149–160. [Google Scholar] [CrossRef] [Green Version]
- Chaves-González, J.M.; Vega-Rodríguez, M.A.; Gómez-Pulido, J.A.; Sánchez-Pérez, J.M. Detecting skin in face recognition systems: A colour spaces study. Digit. Signal Process. 2010, 20, 806–823. [Google Scholar] [CrossRef]
- Sonnentag, O.; Hufkens, K.; Teshera-Sterne, C.; Young, A.M.; Friedl, M.; Braswell, B.H.; Milliman, T.; O’Keefe, J.; Richardson, A.D. Digital repeat photography for phenological research in forest ecosystems. Agric. For. Meteorol. 2012, 152, 159–177. [Google Scholar] [CrossRef]
- Branson, S.; Wegner, J.D.; Hall, D.; Lang, N.; Schindler, K.; Perona, P. From Google Maps to a fine-grained catalog of street trees. ISPRS J. Photogramm. Remote Sens. 2018, 135, 3–30. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Puerta, F.; Barrera, C.; García, B.; PérezRodríguez, F.; García-Pedrero, A.M. Mapping tree canopy in urban environments using point cloudsfrom airborne laser scanning and street level imagery. Sensors 2022, 22, 3269. [Google Scholar] [CrossRef] [PubMed]
- Wegner, J.D.; Branson, S.; Hall, D.; Schindler, K.; Perona, P. Cataloging public objects using aerial and street-level images-urban trees. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 6014–6023. [Google Scholar]
- Jodas, D.S.; Yojo, T.; Brazolin, S.; Velasco, G.D.N.; Papa, J.P. Detection of trees on street-view images using a convolutional neural network. Int. J. Neural Syst. 2022, 32, 2150042. [Google Scholar] [CrossRef] [PubMed]
- Menzel, A.; Sparks, T.; Estrella, N.; Koch, E.; Aasa, A.; Ahas, R.; Alm-Kübler, K.; Bissolli, P.; Braslavská, O.; Briede, A.; et al. European phenological response to climate change matches the warming pattern. Glob. Chang. Biol. 2006, 12, 1969–1976. [Google Scholar] [CrossRef]
- Berra, E.F.; Gaulton, R. Remote sensing of temperate and boreal forest phenology: A review of progress, challenges and opportunities in the intercomparison of in-situ and satellite phenological metrics. For. Ecol. Manag. 2021, 480, 118663. [Google Scholar] [CrossRef]
- Boyd, D.S.; Foody, G.M.; Brown, C.; Mazumdar, S.; Marshall, H.; Wardlaw, J. Citizen science for Earth Observation (Citzens4EO): Understanding current use in the UK. Int. J. Remote Sens. 2022, 43, 2965–2985. [Google Scholar] [CrossRef]
- Crimmins, M.A.; Crimmins, T.M. Monitoring plant phenology using digital repeat photography. Environ. Manag. 2008, 41, 949–958. [Google Scholar] [CrossRef]
- Crimmins, T.M.; Crimmins, M.A. Large-scale citizen science programs can support ecological and climate change assessments. Environ. Res. Lett. 2022, 17, 065011. [Google Scholar] [CrossRef]
- Crooks, A.T.; Croitoru, A.; Jenkins, R.; Mahabir, P.; Agouris, P.; Stefanidis, A. User-generated big data and urban morphology. Built Environ. 2016, 42, 396–414. [Google Scholar] [CrossRef]
- Park, S.; Kim, J.; Mizouni, R.; Lee, U. Motives and concerns of dashcam video sharing. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 4758–4769. [Google Scholar]
- Rashid, M.T.; Zhang, D.Y.; Wang, D. DASC: Towards a road Damage-Aware Social-media-driven Car sensing framework for disaster response applications. Pervasive Mob. Comput. 2020, 67, 101207. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| AOI | Contextual Descriptor | Number of Images | Single or Multiple Trees | Species |
|---|---|---|---|---|
| AOI_1 | LimeRow | 88 | Multiple | Lime |
| AOI_2 | Chestnut Tree | 88 | Single | Horse Chestnut |
| AOI_3 | Library Tree | 87 | Single | Rowan |
| AOI_4 | Roundabout Tree | 87 | Single | Plane |
| AOI_5 | Firestation | 87 | Multiple | Acer |
| AOI_6 | Semington Rd. | 86 | Multiple | Birch, Long Leaved Lime |
| Day of Capture Period | Day of Year | Date (DD/MM/YYYY) |
|---|---|---|
| DAY 1 | 63 | 3 March 2020 |
| DAY 15 | 77 | 17 March 2020 |
| DAY 30 | 92 | 1 April 2020 |
| DAY 5 | 107 | 16 May 2020 |
| DAY 60 | 122 | 1 May 2020 |
| DAY 75 | 137 | 16 May 2020 |
| DAY 90 | 152 | 31 May 2020 |
| AOI | Species of Tree | Dashcam Estimated (DD/MM/YYYY) | Visual Inspection Estimated (DD/MM/YYYY) |
|---|---|---|---|
| 2 | Horse Chestnut | 10 April 2020 | 13 April 2020 |
| 3 | Rowan | 14 April 2020 | 10 April 2020 |
| 4 | Plane | 24 April 2020 | 22 April 2020 |
| 5a | Acer | 23 April 2020 | 20 April 2020 |
| 5b | Acer | 4 May 2020 | 4 May 2020 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boyd, D.S.; Crudge, S.; Foody, G. Towards an Automated Approach for Monitoring Tree Phenology Using Vehicle Dashcams in Urban Environments. Sensors 2022, 22, 7672. https://doi.org/10.3390/s22197672
Boyd DS, Crudge S, Foody G. Towards an Automated Approach for Monitoring Tree Phenology Using Vehicle Dashcams in Urban Environments. Sensors. 2022; 22(19):7672. https://doi.org/10.3390/s22197672
Chicago/Turabian StyleBoyd, Doreen S., Sally Crudge, and Giles Foody. 2022. "Towards an Automated Approach for Monitoring Tree Phenology Using Vehicle Dashcams in Urban Environments" Sensors 22, no. 19: 7672. https://doi.org/10.3390/s22197672