
Accelerated PARAFAC-Based Channel Estimation for Reconfigurable Intelligent Surface-Assisted MISO Systems
Abstract
:1. Introduction
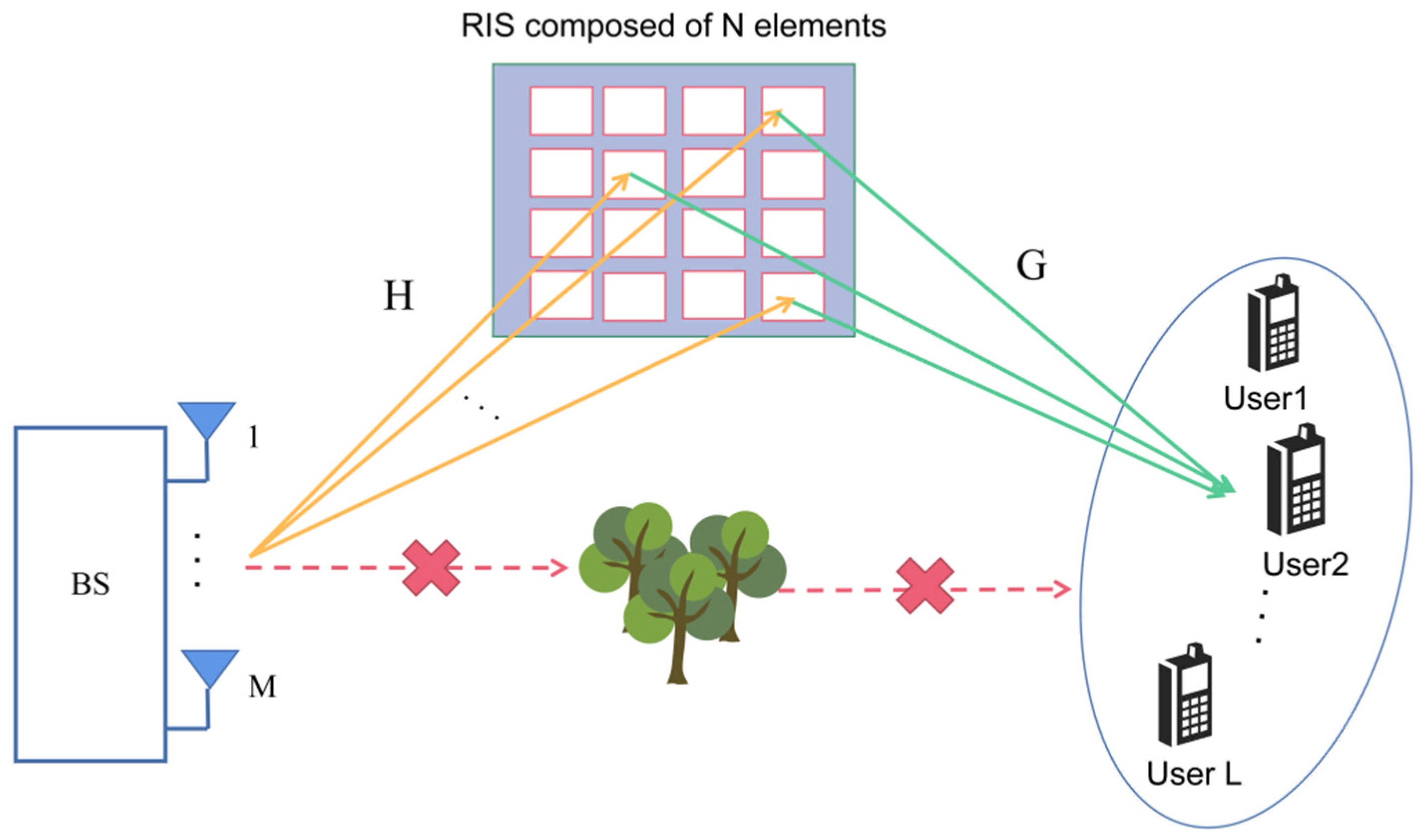
2. System and Signal Models
2.1. System Model
2.2. Preliminaries on the PARAFAC Decomposition
2.3. Signal Model
3. Proposed PARAFAC-Based Channel Estimation
3.1. ABALS Channel Estimation
| Algorithm 1. Proposed Accelerated Bilinear Alternating Least Squares |
| Procedure Input: Received tensor and the error threshold; set ; Randomly initialize , . Output: Estimates , . begin While do ; 1: Compute from (17) with , and compare it with . If,; else; 2: Update using by:. 3: Update using by: . 4: Repeat steps 1 to 3 until the loop termination condition is met. end end |
3.2. Feasibility Conditions
3.3. Computational Complexity
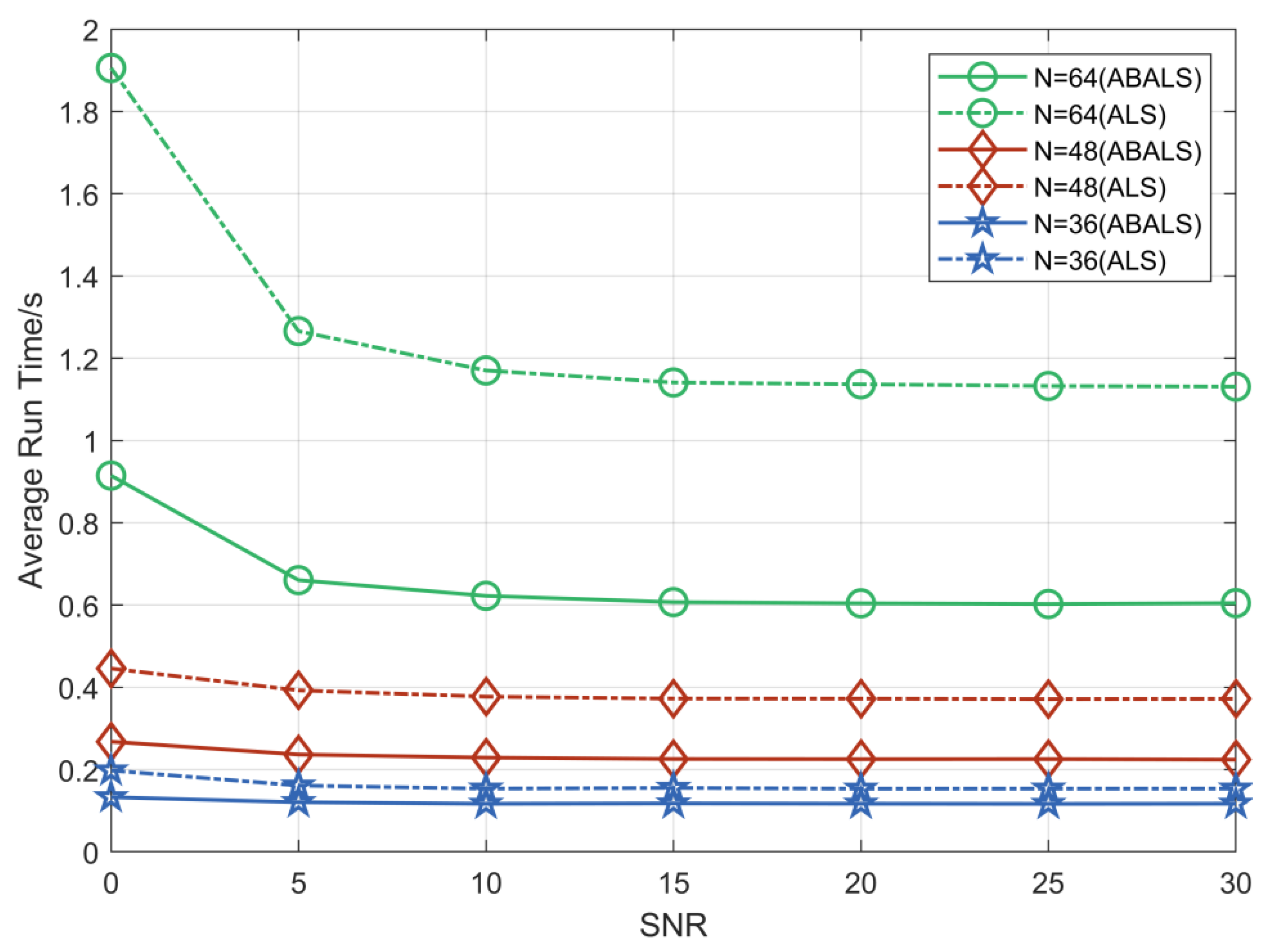
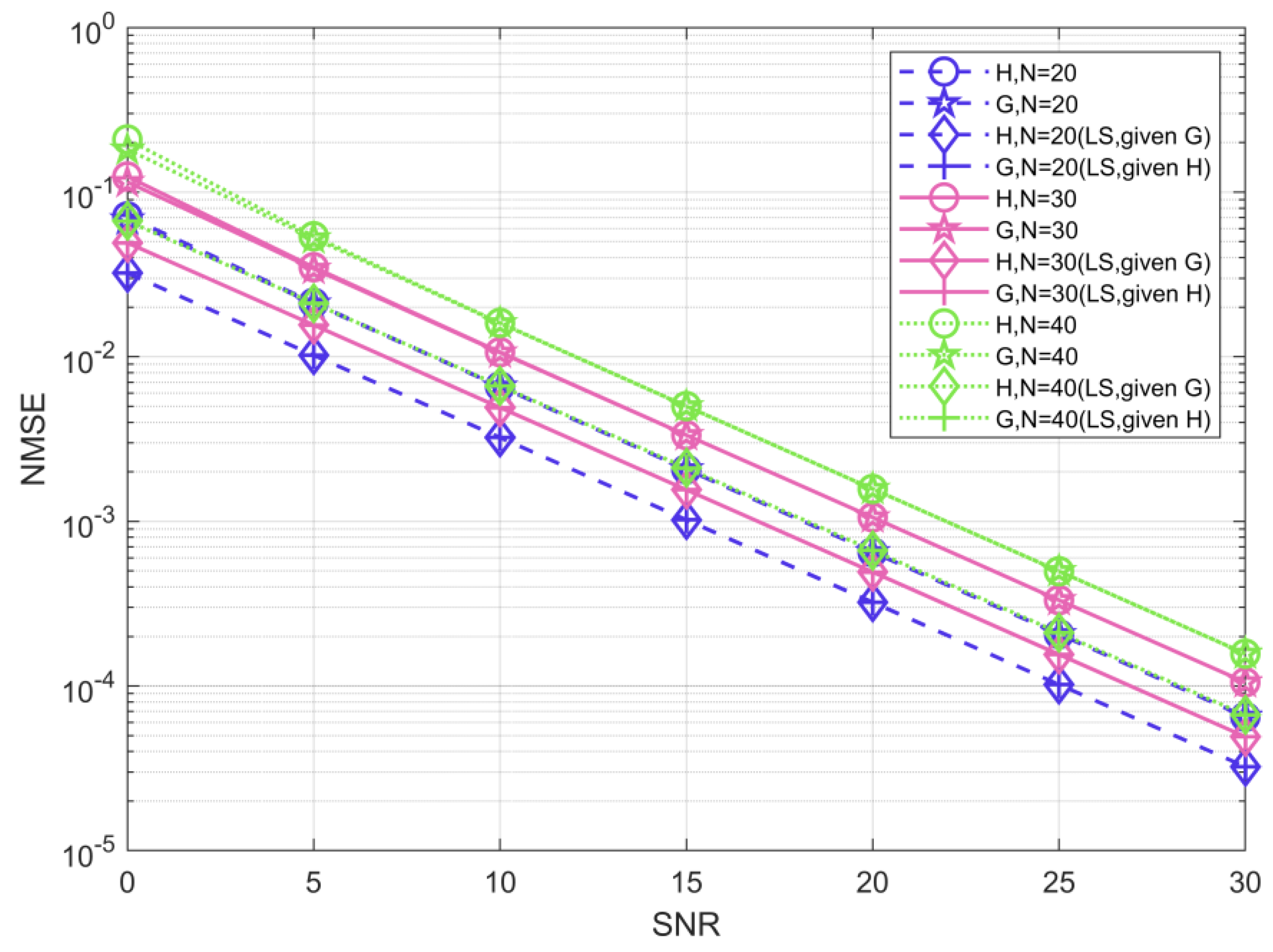
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Di Renzo, M.; Hao, Y.; Wang, J.; Swindlehurst, A.L.; et al. Reconfigurable Intelligent Surfaces for 6G Systems: Principles, Applications, and Research Directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Liang, Y.-C.; Chen, J.; Long, R.; He, Z.-Q.; Lin, X.; Huang, C.; Liu, S.; Shen, X.S.; Di Renzo, M. Reconfigurable intelligent surfaces for smart wireless environments: Channel estimation, system design and applications in 6G networks. Sci. China Inf. Sci. 2021, 64, 200301. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Communications: A Tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Yang, F.; Pitchappa, P.; Wang, N. Terahertz Reconfigurable Intelligent Surfaces (RISs) for 6G Communication Links. Micromachines 2022, 13, 285. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.-S.; Zhang, R. Wireless Communications Through Reconfigurable Intelligent Surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.-C.; Di Renzo, M. Reconfigurable Intelligent Surface Assisted UAV Communication: Joint Trajectory Design and Passive Beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef] [Green Version]
- Jin, Y.; Zhang, J.; Huang, C.; Yang, L.; Xiao, H.; Ai, B.; Wang, Z. Multiple Residual Dense Networks for Reconfigurable Intelligent Surfaces Cascaded Channel Estimation. IEEE Trans. Veh. Technol. 2022, 71, 2134–2139. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, Y.-J.A.; Shi, Y.; Yan, W.; Liu, H. Reconfigurable-Intelligent-Surface Empowered Wireless Communications: Challenges and Opportunities. IEEE Wirel. Commun. 2021, 28, 136–143. [Google Scholar] [CrossRef]
- Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface Assisted Multi-User OFDMA: Channel Estimation and Training Design. IEEE Trans. Wirel. Commun. 2020, 19, 8315–8329. [Google Scholar] [CrossRef]
- Chen, J.; Liang, Y.; Cheng, H.V.; Yu, W. Channel Estimation for Reconfigurable Intelligent Surface Aided Multi-User MIMO Systems. arXiv 2019, arXiv:1912.03619. [Google Scholar]
- Yang, Y.; Zheng, B.; Zhang, S.; Zhang, R. Intelligent Reflecting Surface Meets OFDM: Protocol Design and Rate Maximization. IEEE Trans. Commun. 2020, 68, 4522–4535. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Qi, C.; Li, P.; Lu, P. Channel Estimation for Reconfigurable Intelligent Surface Aided Massive MIMO System. In Proceedings of the 2020 IEEE 21st International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Atlanta, GA, USA, 26–29 May 2020; pp. 1–5. [Google Scholar]
- Hu, C.; Dai, L.; Han, S.; Wang, X. Two-Timescale Channel Estimation for Reconfigurable Intelligent Surface Aided Wireless Communications. IEEE Trans. Commun. 2021, 69, 7736–7747. [Google Scholar] [CrossRef]
- He, Z.-Q.; Yuan, X. Cascaded Channel Estimation for Large Intelligent Metasurface Assisted Massive MIMO. IEEE Wirel. Commun. Lett. 2020, 9, 210–214. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Wymeersch, H.; Juntti, M. Channel Estimation for RIS-Aided mmWave MIMO Systems via Atomic Norm Minimization. IEEE Trans. Wirel. Commun. 2021, 20, 5786–5797. [Google Scholar] [CrossRef]
- Jian, M.; Zhao, Y. A Modified Off-grid SBL Channel Estimation and Transmission Strategy for RIS-Assisted Wireless Communication Systems. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1848–1853. [Google Scholar]
- Zhi, K.; Pan, C.; Ren, H.; Wang, K.; Elkashlan, M. Reconfigurable Intelligent Surface-Aided MISO Systems with Statistical CSI: Channel Estimation, Analysis and Optimization: (Invited Paper). In Proceedings of the 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Lucca, Italy, 27–30 September 2021; pp. 576–580. [Google Scholar]
- Peng, C.; Deng, H.; Xiao, H.; Qian, Y.; Zhang, W.; Zhang, Y. Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems. Sensors 2022, 22, 5908. [Google Scholar] [CrossRef] [PubMed]
- Tekbiyik, K.; Kurt, G.K.; Huang, C.; Ekti, A.R.; Yanikomeroglu, H. Channel Estimation for Full-Duplex RIS-assisted HAPS Backhauling with Graph Attention Networks. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Kundu, N.K.; McKay, M.R. Channel Estimation for Reconfigurable Intelligent Surface Aided MISO Communications: From LMMSE to Deep Learning Solutions. IEEE Open J. Commun. Soc. 2021, 2, 471–487. [Google Scholar] [CrossRef]
- Wang, Z.; Cai, Y.; Liu, A.; Wang, J.; Yue, G. Mixed-Timescale Channel Estimation for MIMO Relay Multi-User Systems Based on the PARAFAC Decomposition. IEEE Commun. Lett. 2021, 25, 1288–1292. [Google Scholar] [CrossRef]
- Cichocki, A.; Mandic, D.; De Lathauwer, L.; Zhou, G.; Zhao, Q.; Caiafa, C.; Phan, H.A. Tensor Decompositions for Signal Processing Applications: From two-way to multiway component analysis. IEEE Signal Process. Mag. 2015, 32, 145–163. [Google Scholar] [CrossRef] [Green Version]
- Yue, R.; Khandaker, M.R.A.; Yong, X. Channel Estimation of Dual-Hop MIMO Relay System via Parallel Factor Analysis. IEEE Trans. Wirel. Commun. 2012, 11, 2224–2233. [Google Scholar] [CrossRef]
- De Araujo, G.T.; de Almeida, A.L.F.; Boyer, R. Channel Estimation for Intelligent Reflecting Surface Assisted MIMO Systems: A Tensor Modeling Approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 789–802. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C.; Zhang, Z.; Debbah, M. Channel Estimation for RIS-Empowered Multi-User MISO Wireless Communications. IEEE Trans. Commun. 2021, 69, 4144–4157. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C. Parallel Factor Decomposition Channel Estimation in RIS-Assisted Multi-User MISO Communication. In Proceedings of the 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 8–11 June 2020; pp. 1–5. [Google Scholar]
- Comon, P.; Luciani, X.; de Almeida, A.L.F. Tensor decompositions, alternating least squares and other tales. J. Chemom. 2009, 23, 393–405. [Google Scholar] [CrossRef] [Green Version]
- Sidiropoulos, N.D.; De Lathauwer, L.; Fu, X.; Huang, K.; Papalexakis, E.E.; Faloutsos, C. Tensor Decomposition for Signal Processing and Machine Learning. IEEE Trans. Signal Process. 2017, 65, 3551–3582. [Google Scholar] [CrossRef]
- Li, N.; Kindermann, S.; Navasca, C. Some convergence results on the Regularized Alternating Least-Squares method for tensor decomposition. Linear Algebr. Appl. 2013, 438, 796–812. [Google Scholar] [CrossRef]
- Stegeman, A.; Sidiropoulos, N.D. On Kruskal’s uniqueness condition for the Candecomp/Parafac decomposition. Linear Algebr. Appl. 2007, 420, 540–552. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Liu, L.; Cui, S. Channel Estimation for Intelligent Reflecting Surface Assisted Multiuser Communications: Framework, Algorithms, and Analysis. IEEE Trans. Wirel. Commun. 2020, 19, 6607–6620. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Antenna Setup | Representative Work |
|---|---|
| RIS-assisted MIMO | Cascade channel estimation based on sparse matrix factorization and complementation [14]. |
| Cascade channel estimation based on atomic parametric minimization [15]. | |
| Cascade channel estimation based on deep learning [20]. | |
| Separate channel estimation using the on/off reflection model at RIS [11]. | |
| Separate channel estimation based on an iterative algorithm [12]. | |
| Separate channel estimation based on the tensor model and its algebraic structure [24]. | |
| RIS-assisted MISO | Cascade channel estimation based on a two-timescale channel estimation framework and a coordinate decent-based algorithm [13]. |
| Cascade channel estimation based on an LMMSE estimator [17]. | |
| Separate channel estimation based on an active sensor-aided algorithm [16]. | |
| Separate channel estimation based on a vector-based approximate message-passing algorithm [25]. | |
| RIS-assisted SISO | Cascade channel estimation based on the channel correlation [9,10]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, H.; Deng, H.; Guo, A.; Qian, Y.; Peng, C.; Zhang, Y. Accelerated PARAFAC-Based Channel Estimation for Reconfigurable Intelligent Surface-Assisted MISO Systems. Sensors 2022, 22, 7463. https://doi.org/10.3390/s22197463
Xiao H, Deng H, Guo A, Qian Y, Peng C, Zhang Y. Accelerated PARAFAC-Based Channel Estimation for Reconfigurable Intelligent Surface-Assisted MISO Systems. Sensors. 2022; 22(19):7463. https://doi.org/10.3390/s22197463
Chicago/Turabian StyleXiao, Haoqi, Honggui Deng, Aimin Guo, Yuyan Qian, Chengzuo Peng, and Yinhao Zhang. 2022. "Accelerated PARAFAC-Based Channel Estimation for Reconfigurable Intelligent Surface-Assisted MISO Systems" Sensors 22, no. 19: 7463. https://doi.org/10.3390/s22197463