
IoT Sensor Network Using ESPAR Antenna Based on Beam Scanning Method for Direction Finding



Abstract
:1. Introduction
1.1. Motivation
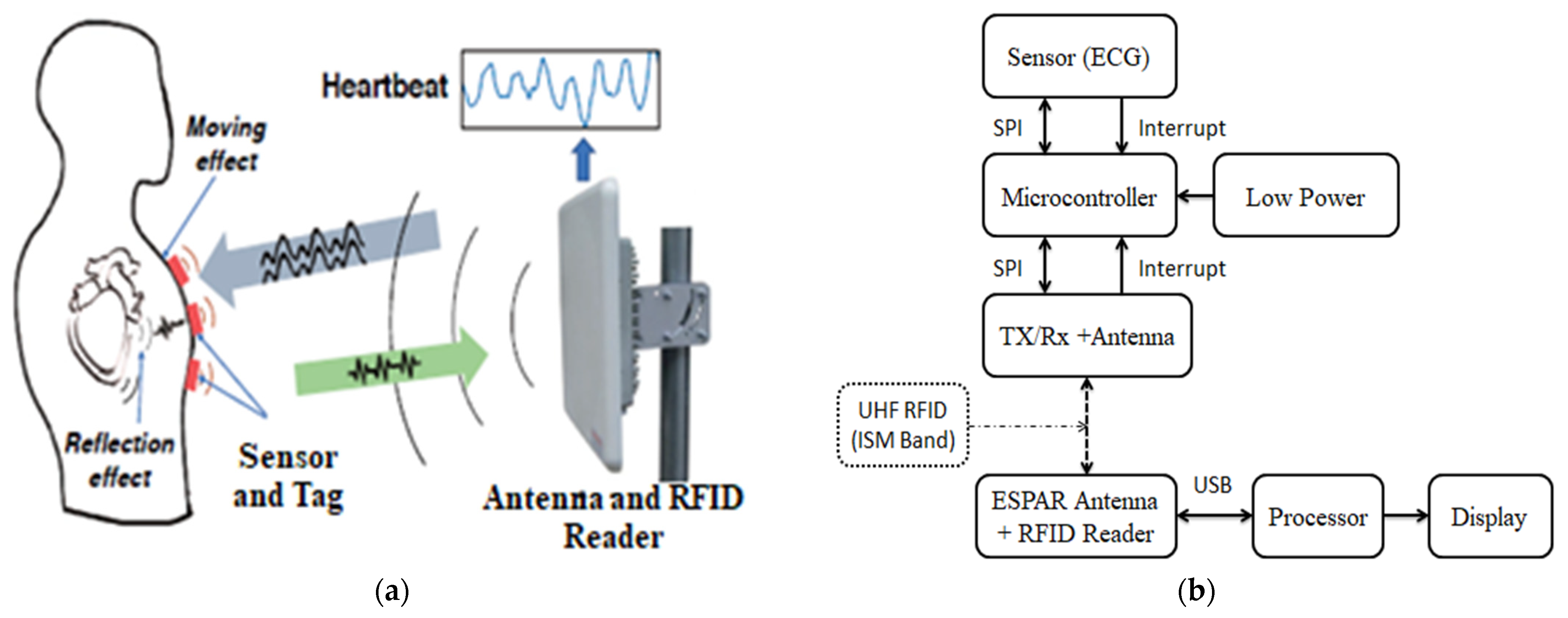
- Suggesting a low power sensor system model for ECG (electrocardiogram) application with the process of configuration.
- A single ESPAR antenna and an array of ESPAR which are capable of working at the ISM frequency band of (2.40~2.50) GHz antennas are designed by using CST studio.
- To find the exact location of tags, an efficient method, namely BS, is proposed which is also simulated with the help of CST studio.
- The process of evaluation based on the BSM and the range extensions are analyzed by MATLAB simulation tools.
1.2. Related Works
2. System Model and Method
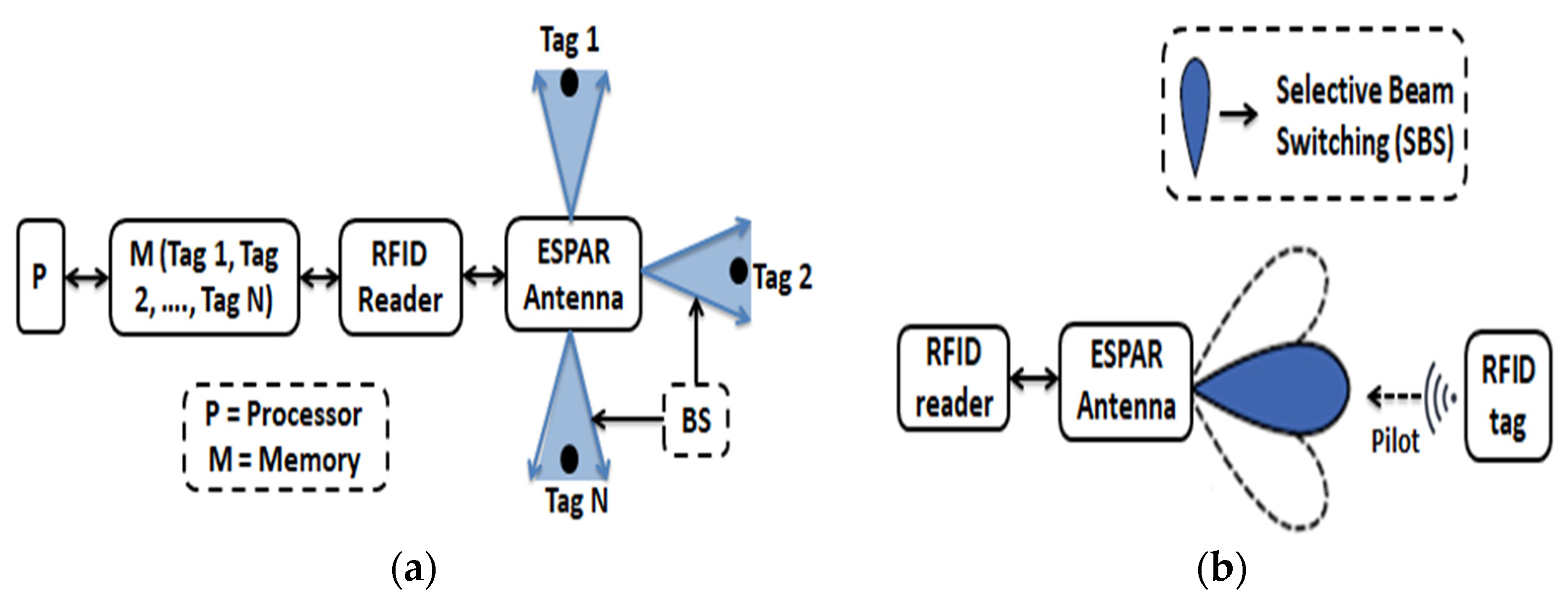
2.1. Sensor System Architecture
2.2. System Configuration
- Minimum gain to interference direction,
- Maximum gain to the authorized tags of the system.
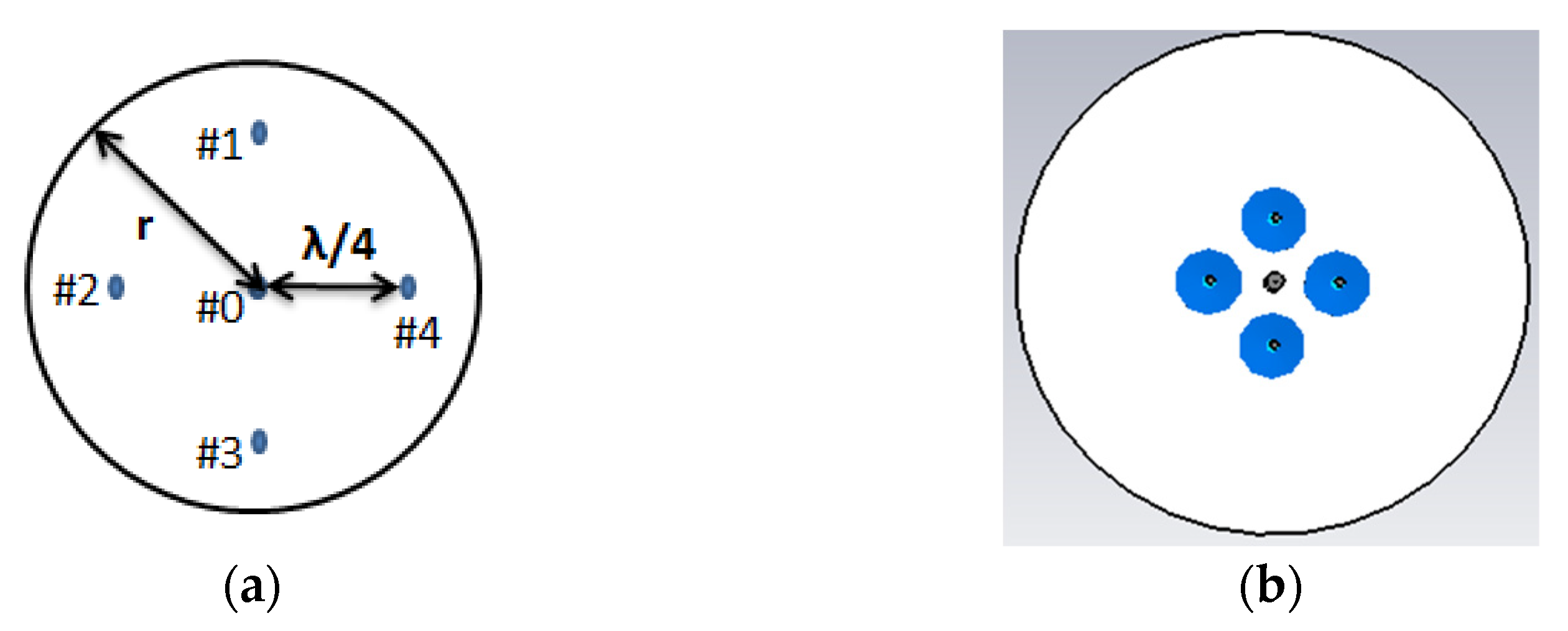
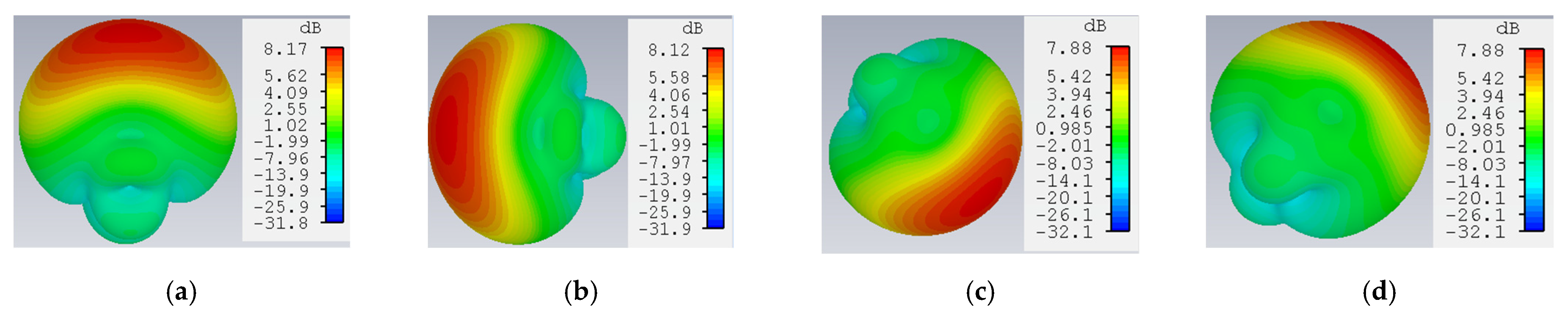
2.3. ESPAR Antenna Design
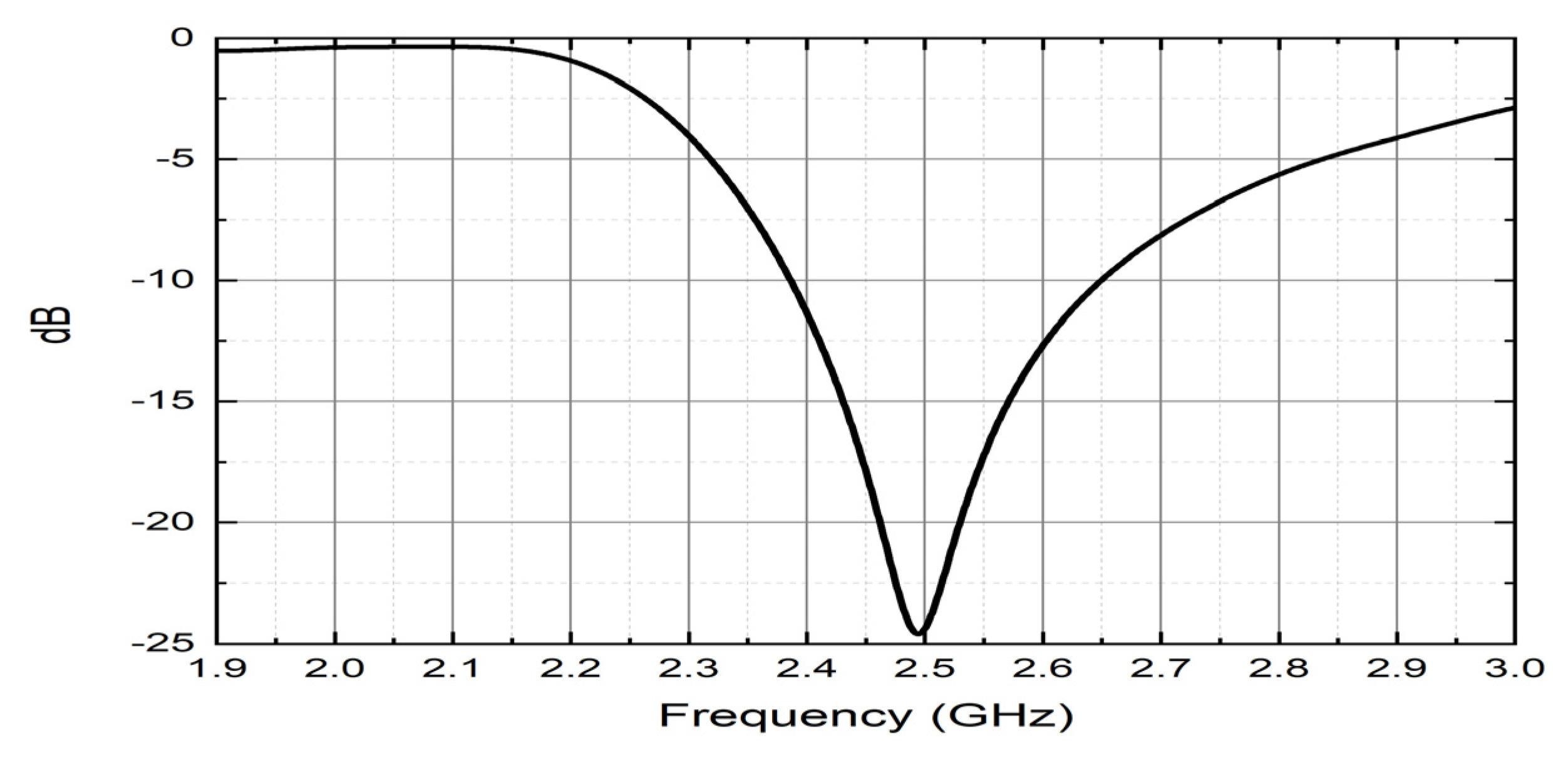
2.3.1. Single ESPAR Antenna
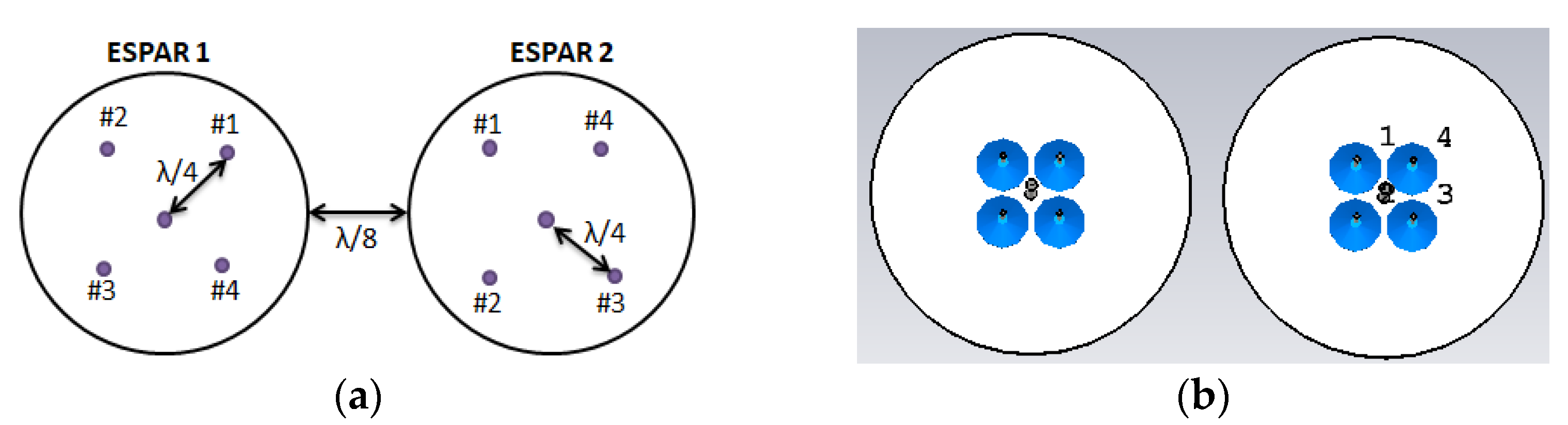
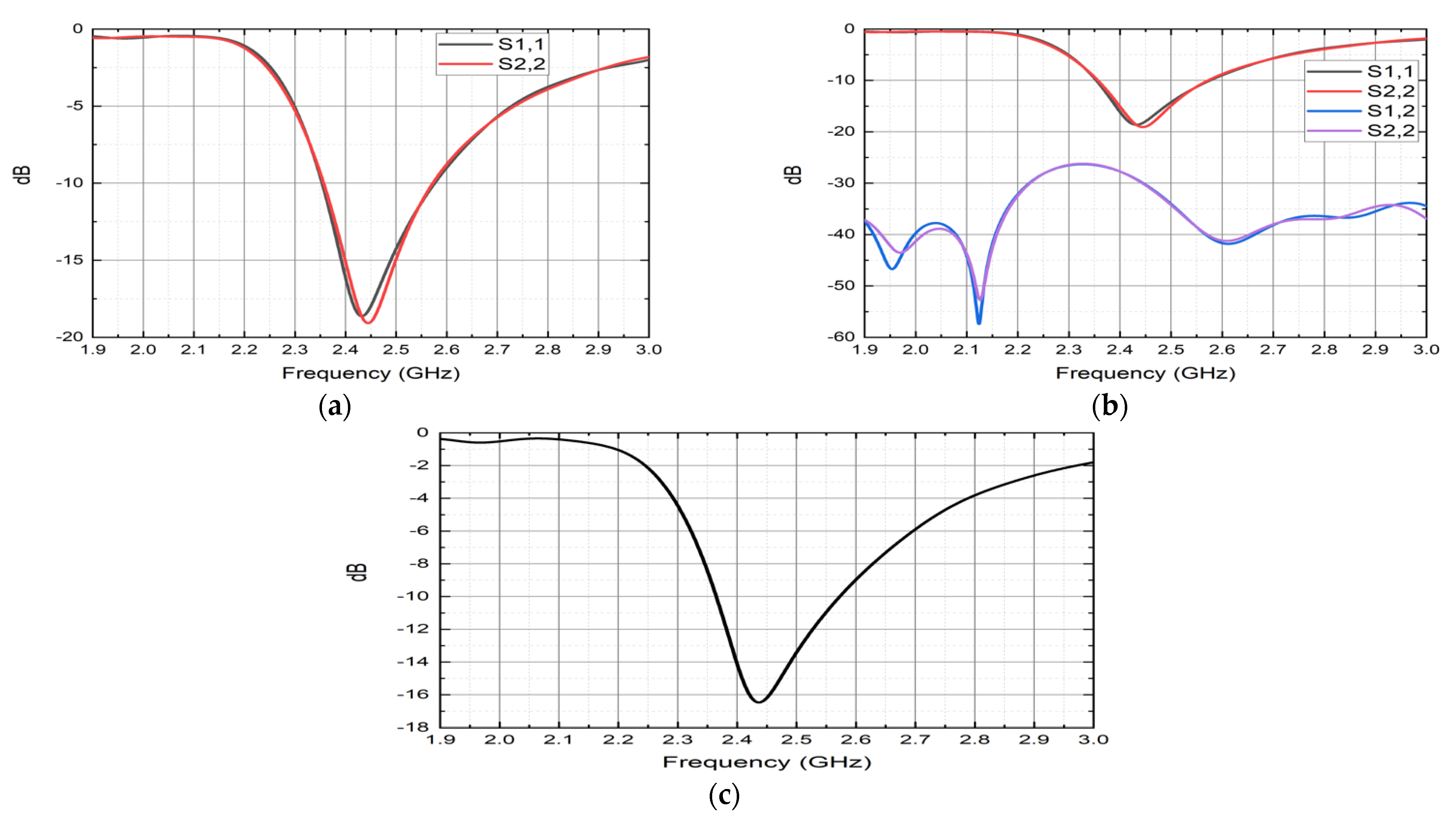
2.3.2. 1 × 2 Array of ESPAR Antenna
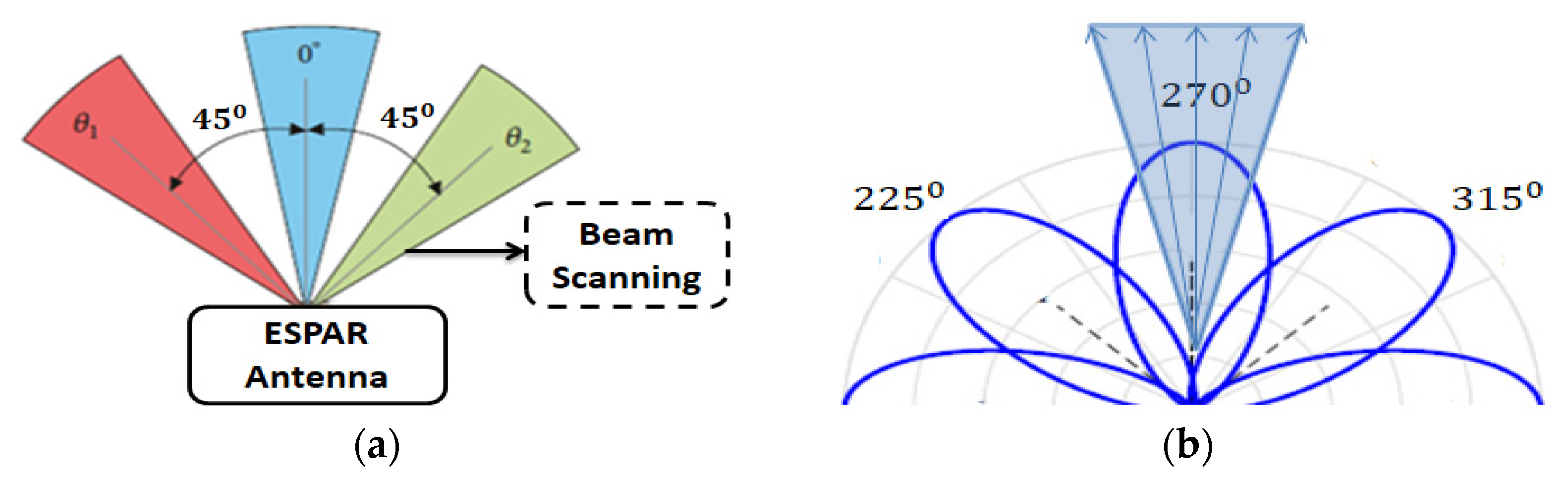
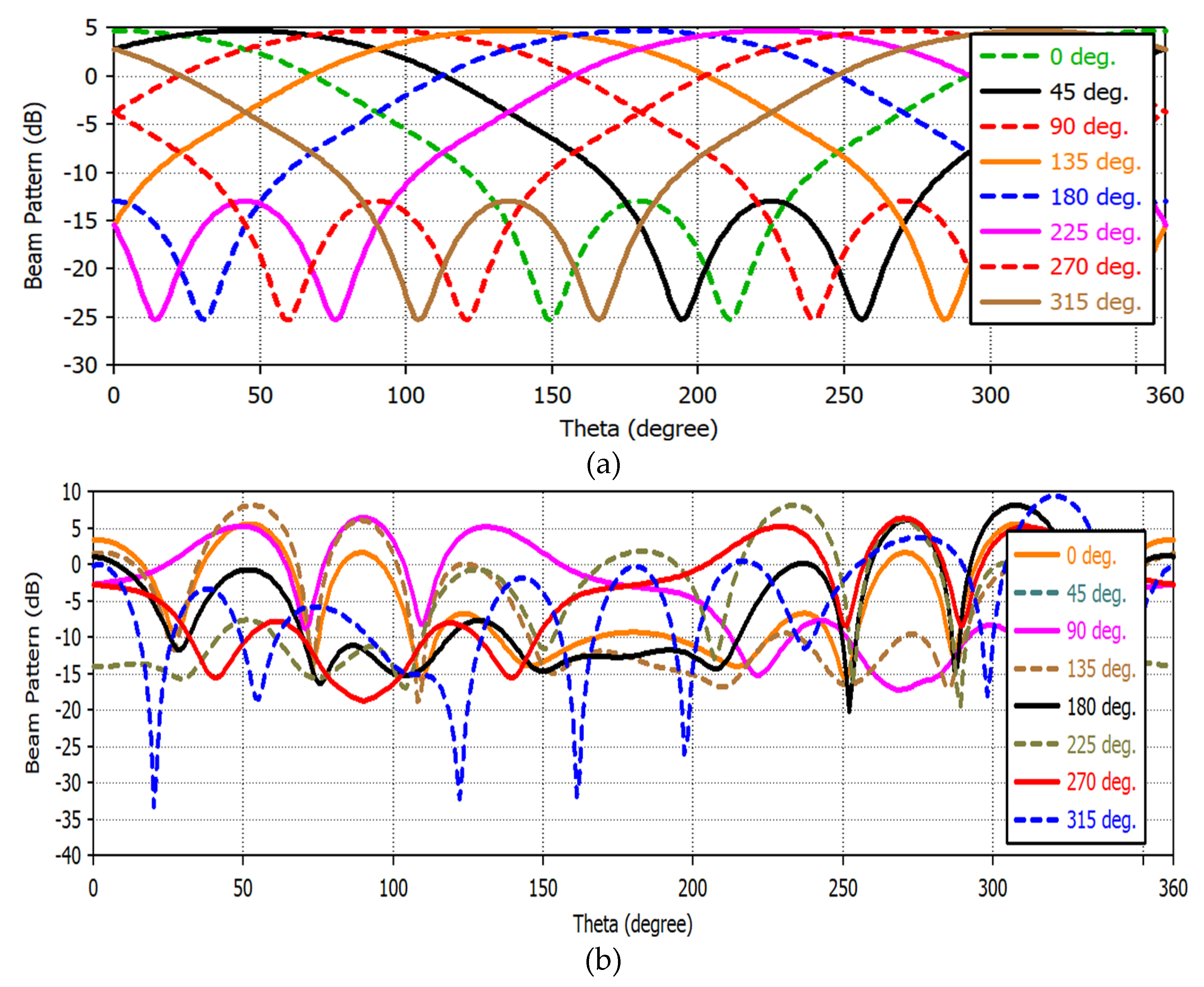
3. Beam Scanning Method (BSM)
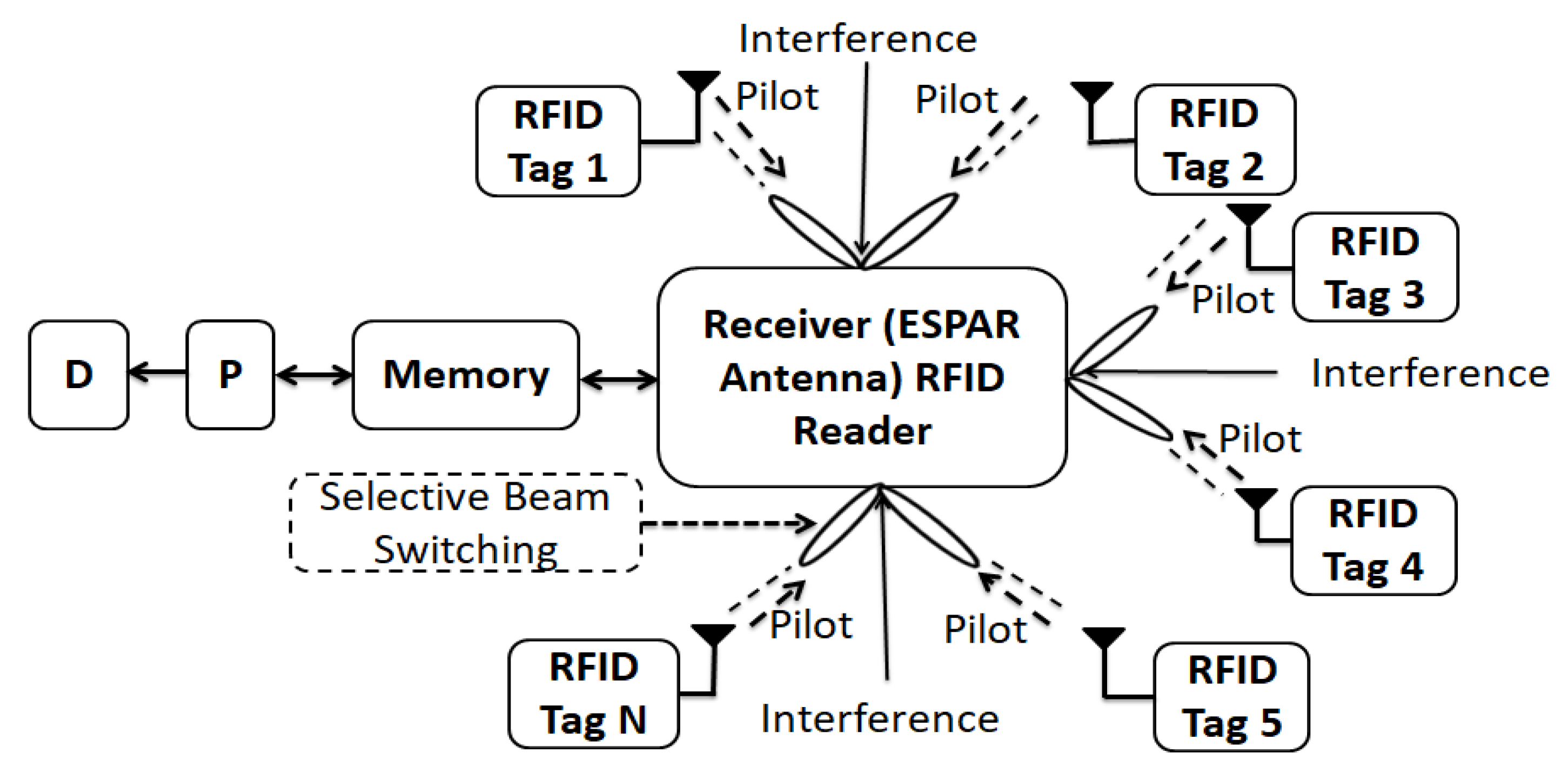
3.1. BSM and SBS
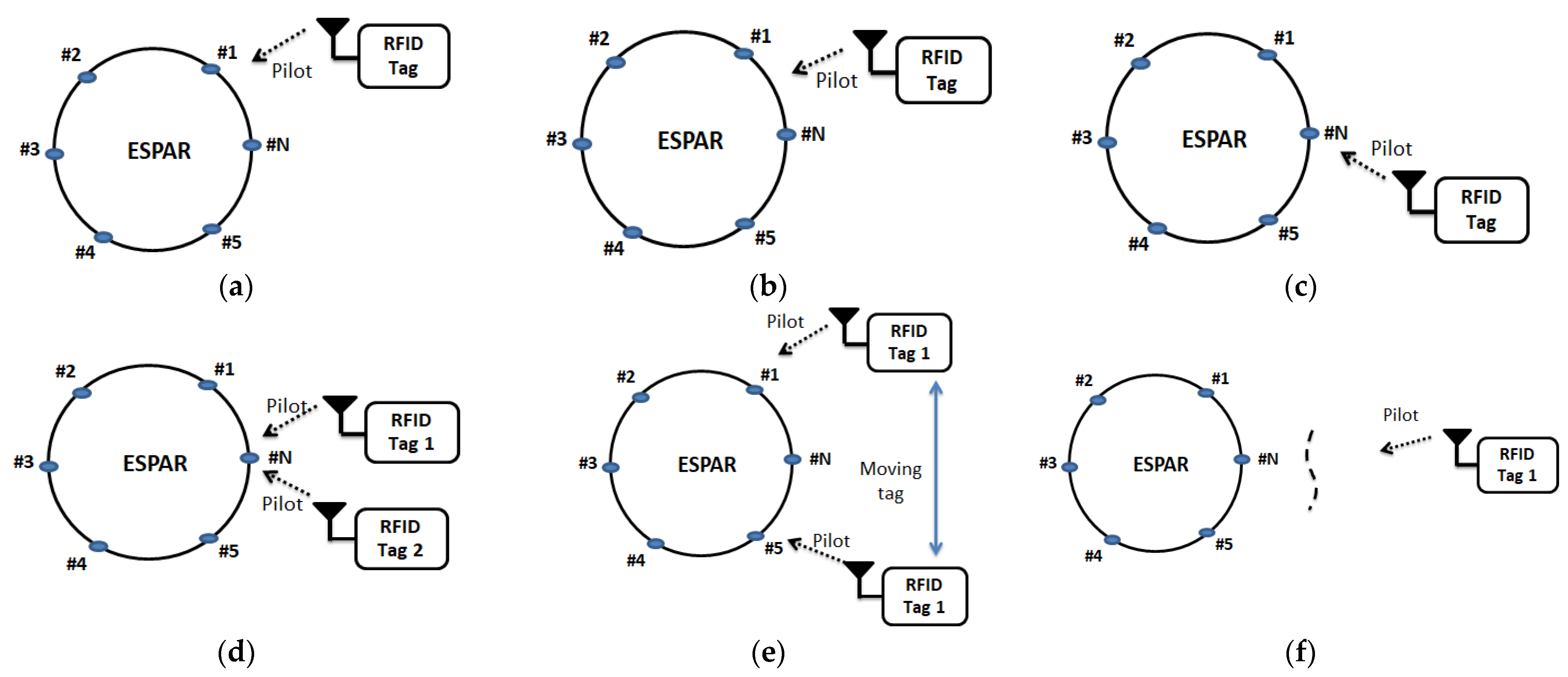
3.2. Direction Findings Using BSM
3.3. BSM Operation
| Algorithm 1: Tag’s Localization Beam Scanning Algorithm |
|
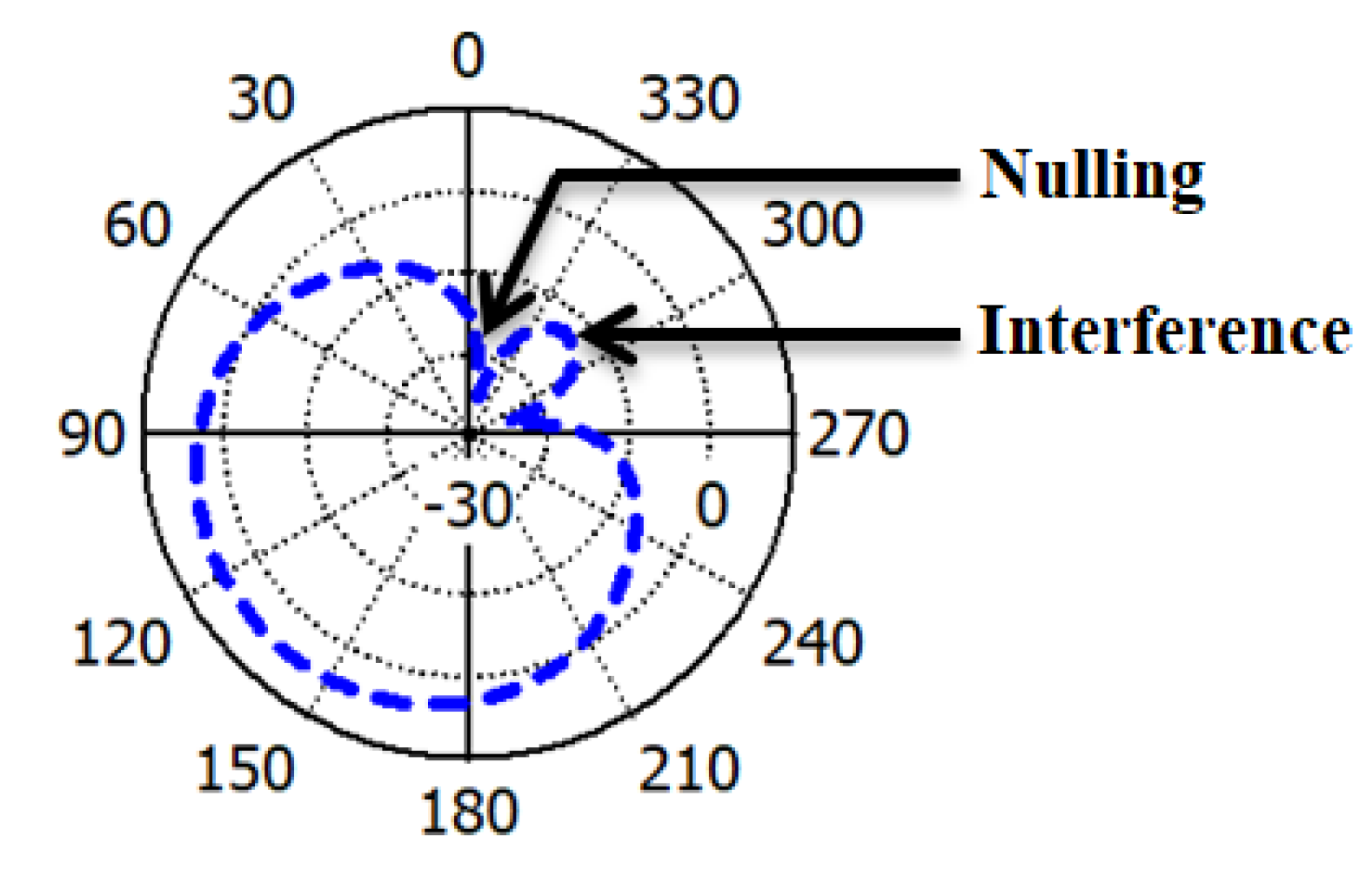
4. SIR Improvement and Range Extension
4.1. SIR Improvement of ESPAR Antenna
4.2. Communication Range Extension
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RFID | Radio Frequency Identification |
| UHF | Ultra-High Frequency |
| IoT | Internet of Things |
| WSNs | Wireless Sensor Networks |
| ECG | Electrocardiogram |
| SPI | Serial Peripheral Interface |
| IC | Integrated Circuit |
| QoS | Quality of Service |
| ESPAR | Electronically Steerable Parasitic Array Radiator |
| ISM | Industrial, Scientific and Medical |
| MC | Micro Controller |
| DoA | Direction of Arrival |
| AoA | Angle of Arrival |
| ToA | Time of Arrival |
| TDoA | Time Difference of Arrival |
| RSS | Received Signal Strength |
| RSSD | Received Signal Strength Difference |
| WLAN | Wireless Local Area Network |
| AANET | Automotive Ad-hoc Network |
| SIR | Signal to Interference Ratio |
| BSM | Beam Scanning Method |
| SBS | Selective Beam Switching |
| SNR | Signal to Noise Ratio |
References
- Rahman, M.M.; Ryu, H.-G. Direction Finding of ESPAR Antenna Based on Beam Scanning Method for IoT Sensor Network. In Proceedings of the International Conference on Green and Human Information Technology, Jeju Island, Korea, 19–21 January 2022. [Google Scholar]
- Yi, Z.; Zhange, R.; Xu, B.; Zhange, R.; Xu, B.; Chen, Y.; Zhu, L.; Li, F. Wide-Angle Beam Scanning Antenna in E-plane for K-band Radar Sensor. IEEE Access 2019, 7, 171684–171690. [Google Scholar] [CrossRef]
- Kuo, Y.-W.; Li, C.-L.; Jhang, J.-H.; Lin, S. Design of a Wireless Sensor Network-Based IoT Platform for Wide Area and Heterogeneous Applications. IEEE Sens. J. 2018, 18, 5187–5197. [Google Scholar] [CrossRef]
- Mezzanotte, P.; Palazzi, V.; Alimenti, F.; Roselli, R. Innovative RFID Sensors for Internet of Things Applications. IEEE J. of Micro. 2021, 1, 55–65. [Google Scholar] [CrossRef]
- Taillefer, E.; Hirata, A.; Ohira, T. Direction-of-arrival estimation using radiation power pattern with an ESPAR antenna. IEEE Trans. Antennas Propag. 2005, 53, 678–684. [Google Scholar] [CrossRef]
- Park, J.; Kim, Y.-J.; Lee, B.-K. Passive Radio-Frequency Identification Tag-Based Indoor Localization in Multi-Stacking Racks for Warehousing. Appl. Sci. 2020, 10, 3623. [Google Scholar] [CrossRef]
- Nabeel, M.; Dressler, F. Turning Sensor Networks into Distributed Antenna Arrays for Improved Communication Performance. IEEE Com. Mag. 2019, 57, 100–105. [Google Scholar] [CrossRef]
- Rzymowski, M.; Duraj, D.; Kulas, L. UHF ESPAR Antenna for Simple Angle of Arrival Estimation in UHF RFID Applications. In Proceedings of the International Conference on Microwave, Radar and Wireless Communications (MIKON), Krakow, Poland, 9–11 May 2016. [Google Scholar]
- Gulati, K.; Boddu, R.; Kapila, D. A review paper on wireless sensor network techniques in Internet of Things (IoT). Mater. Today Proc. 2022, 51, 161–165. [Google Scholar] [CrossRef]
- Sun, J.; Ning, Y.; Jiang, W. Influence of Parasitic Elements on Characteristics and Design of ESPAR Antenna. In Proceedings of the URSI—General Assembly and Scientific Symposium (URSI-GASS), Beijing, China, 20 October 2014. [Google Scholar]
- Motroni, A.; Buffi, A.; Nepa, P. Forklift Tracking: Industry 4.0 Implementation in Large-Scale Warehouses through UWB Sensor Fusion. Appl. Sci. 2021, 11, 10607. [Google Scholar] [CrossRef]
- Son, D.-C.; Lee, S.-H.; Cho, H.-K. The characteristics of broadband ESPAR antenna with coupled multi-conductor strips. Microw. Opt. Technol. Lett. 2016, 58, 210–215. [Google Scholar] [CrossRef]
- Ding, W.; Zhong, Q.; Wang, Y.; Guan, C.; Fang, B. Target Localization in Wireless Sensor Networks Based on Received Signal Strength and Convex Relaxation. Sensors 2022, 22, 733. [Google Scholar] [CrossRef]
- Liang, Q.; Sun, B.; Zhou, G. Broadband ESPAR antenna using sleeve wires. Int. J. RF Micro. Comput. Aided Eng. 2018, 28, 21171. [Google Scholar] [CrossRef]
- Zhang, Z.; Xing, S.; Zhu, Y.; Yan, F.; Shen, L. RSS-Based Localization in WSNs Using Gaussian Mixture Model via Semidefinite Relaxation. IEEE Commun. Lett. 2017, 21, 6. [Google Scholar] [CrossRef]
- Xu, B.; Xu, S.Z.; Wang, Q.; Chen, Z.H. Attenuation Model of Antenna Signal with Barriers in Wireless Sensor Network. Appl. Mech. Mater. 2013, 380–384, 3908–3911. [Google Scholar] [CrossRef]
- Ngamjanyaporn, P.; Phongcharoenpanich, C.; Akkaraekthalin, P.; Krairiksh, M. Signal-to-Interference Ratio Improvement by Using a Phased Array Antenna of Switched-Beam Elements. IEEE Trans. Antennas Propag. 2005, 53, 1819–1828. [Google Scholar] [CrossRef]
- Mekelleche, F.; Haffaf, H. Classification and Comparison of Range-Based Localization Techniques in Wireless Sensor Networks. J. Commun. 2017, 12, 221–227. [Google Scholar] [CrossRef]
- An, C.; Ryu, H.-G. Design and Evaluation of ESPAR Antenna using Hexagonal Microstrip Patch with Hole. Proceeding of the International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 19 November 2021. [Google Scholar]
- Alshami, B.; Aboulnour, H.; Dib, M. Design of a Broadband ESPAR Antenna. Proceeding of the Mediterranean Microwave Symposium (MMS), Tangiers, Morocco, 8 February 2010. [Google Scholar]
- Kausar, S.; Rahman, H.; Kausar, A. ESPAR Antenna System for Dynamic Tracking of Active Targets. Proceeding of the European Modeling Symposium, Manchester, UK, 21–23 October 2003. [Google Scholar]
- Wang, J.; Zhao, L.; Hao, Z.-C. Wide-Angle Frequency Beam Scanning Antenna Based on the Higher-Order Modes of Spoof Surface Plasmon Polariton. IEEE Trans. Antennas Propag. 2020, 68, 7652–7657. [Google Scholar] [CrossRef]
- Rahman, M.M.; Aziz, T.; Ryu, H.-G. UHF RFID Wireless Communication System for Real Time ECG Monitoring. In Proceedings of the International Conference on Ubiquitous and Future Networks (ICUFN), South, Korea, 17–20 August 2021. [Google Scholar]
- Li, X.; Zhu, H.; Li, Q. Beam Scanning UHF RFID Reader Antenna Design for Metal Environment Application (Invited paper). In Proceedings of the IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018. [Google Scholar]
- Ying, J.; Pahlavan, K. Precision of RSS-Based Localization in the IoT. Int. J. Wirel. Inf. Netw. 2019, 26, 10–23. [Google Scholar] [CrossRef]
- Kumar, D.; Varma, S. An Efficient Localization Based on Directional Antenna for Wireless Sensor Networks (WSN’s). Int. J. Comp. Electr. Eng. 2019, 1, 1793–8163. [Google Scholar] [CrossRef]
- Supriyanto, T.; Nurinsani, R.K.; Firmansyah, T. Design of Microstrip Rectangular Circular Array Antenna 1x 8 at Frequency of 1800 MHz for Increase Power of 4G signal. J. Phys. 2018, 1364, 1364. [Google Scholar]
- Rahman, M.M.; Ryu, H.-G. RFID Based WSN Communication System in Interference Channel. Proceeding of the IEEE International Symposium on Local and Metropolitan Area Networks (LANMAN), Boston, MA, USA, 12–14 July 2021. [Google Scholar]
- Alanezi, M.A.; Bouchekara, H.R.E.H. Range-Based Localization of a Wireless Sensor Network for Internet of Things Using Received Signal Strength Indicator and the Most Valuable Player Algorithm. Technologies 2021, 9, 42. [Google Scholar] [CrossRef]
- Alami, A.; Ghazaoui, Y.; Das, S. Design and Simulation of RFID Array Antenna 2×1 for Detection System of Objects or Living Things in Motion. Proceeding of the International Workshop on Microwave Engineering, Communications Systems and Technologies (MECST), Leuven, Belgium, 29 April–2 May 2019. [Google Scholar]
- Tomic, S.; Beko, M.; Dinis, R. On Target Localization Using Combined RSS and AoA Measurements. Sensors 2018, 18, 1266. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khosla, D.; Malhi, F.S. An Ultra-Wideband Dielectric Resonator Antenna for WSN Based IoT Applications in Agriculture. Int. J. Sens. Wirel. Commun. Control. 2020, 10, 11. [Google Scholar] [CrossRef]
- Wang, Q.; Dai, H.-N.; Zheng, Z.; Imran, M.; Vasilakos, A.V. On Connectivity of Wireless Sensor Networks with Directional Antennas. Sensors 2017, 17, 134. [Google Scholar] [CrossRef] [PubMed]
- Benes, F.; Stasa, P.; Svub, J.; Alfian, G.; Kang, Y.-S.; Rhee, J.-T. Investigation of UHF Signal Strength Propagation atWarehouse Management Applications Based on Drones and RFID Technology Utilization. Appl. Sci. 2022, 12, 1277. [Google Scholar] [CrossRef]
- Cmiljanic, N.; Landaluce, H.; Perallos, A. A Comparison of RFID Anti-Collision Protocols for Tag Identification. Appl. Sci. 2018, 8, 1282. [Google Scholar] [CrossRef]
- Gligoric, N.; Krco, S.; Hakola, L.; Vehmas, K.; De, S.; Moessner, K.; Jansson, K.; Polenz, I.; van Kranenburg, R. SmartTags: IoT Product Passport for Circular Economy Based on Printed Sensors and Unique Item-Level Identifiers. Sensors 2019, 19, 586. [Google Scholar] [CrossRef] [PubMed]
- Abdullah, N.; Kuwahara, Y. Steerable Antenna Using Algorithm Based on Downhill Simplex Method. Prog. Electromagn. Res. C 2011, 22, 23–34. [Google Scholar] [CrossRef]
- Enis, K.; Muhammad, U.; Teerachot, S.; Staszewski, R.B.; Zhu, A. A Low Profile Highly Isolated Phased Array MIMO Antenna System for 5G Applications at 28 GHz. In Proceedings of the European Conference on Antennas and Propagation, Dusseldorf, Germany, 22–26 March 2021; pp. 1–4. [Google Scholar]
- Puccinelli, P.; Haenggi, M. Multipath fading in wireless sensor networks: Measurements and interpretation. In Proceedings of the International Conference on Wireless communications and Mobile Computing (IWCMC), Vancouver, BC, Canada, 3–6 July 2006; pp. 1039–1044. [Google Scholar]
- Salah, I.; Hafid, T.; Abdelmajid, B.; Abbassi, E.; Foshi, A.; Jaouad, A. Design and Development of a Microstrip Patch Antenna Array for Rectenna System. In Proceedings of the 13th International Conference on Intelligent Systems: Theories and Applications, Halkidiki, Greece, 5–7 June 2020; Volume 53, pp. 1–5. [Google Scholar]
- Imran, A.; Wan, L.C.; Hanieh, A.; Simon, W. Compact and Low Cost Linear Antenna Array for Millimeter Wave Automotive Radar Applications. In Proceedings of the 14th European Conference on Antennas and Propagation, Copenhagen, Denmark, 15–20 March 2020; pp. 1–4. [Google Scholar]
- Rahman, M.M.; Ryu, H.-G. ESPAR Antenna with Double Ring Placement of Parasitic Elements. In Proceedings of the 17th International Workshop on Antenna Technology (iWAT), Dublin, Ireland, 16–18 May 2022; pp. 216–219. [Google Scholar]
- Groth, M.; Nyka, K.; Kulas, L. Calibration-Free Single-Anchor Indoor Localization Using an ESPAR Antenna. Sensors 2021, 21, 3431. [Google Scholar] [CrossRef]
- Liu, C.; Peng, D.; Chen, Z.; Wu, Y.; Wang, B. Reconfigurable Antenna Array Direction Finding System Based on a Fast Search Algorithm. Sensors 2021, 21, 4729. [Google Scholar] [CrossRef]
- Wang, Z.; Pan, X.; Yang, F.; Xu, S.; Li, M. Real-Time Mode Switching and Beam Scanning of High-Gain OAM Waves Using a 1-Bit Reconfigurable Reflectarray Antenna. Electronics 2020, 9, 2181. [Google Scholar] [CrossRef]
- Rutkowski, A.; Kawalec, A. Some of Problems of Direction Finding of Ground-Based Radars Using Monopulse Location System Installed on Unmanned Aerial Vehicle. Sensors 2020, 20, 5186. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.M.; Ryu, H.-G. Wide Angle Beam Scanning Method for the WSN Communication Applications. In Proceedings of the 37th International Technical Conference on Circuits/Systems, Computers, and Communications, Phuket, Thailand, 5–8 July 2022. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Radius of the substrate, r | 90 mm |
| Height of the active element, ha | 26 mm |
| Height of the passive elements, hp | 27.2 mm |
| Distance between active and parasitic elements, a | λ/4 |
| Nominal impedance | 50 Ω |
| Operating frequency, f | 2.49 GHz |
| Number, n | Lumped Ports | ||||
|---|---|---|---|---|---|
| #1 | #2 | #3 | #4 | ||
| 1 | 0.1 pF | 0.5 nH | 0.5 nH | 0.5 nH | |
| 2 | 0.1 nH | 0.5 pF | 0.1 pF | 0.7 nH | |
| 3 | 0.5 nH | 0.1 pF | 0.5 nH | 0.5 nH | |
| 4 | 0.5 nH | 0.1 nH | 0.5 pF | 0.1 pF | |
| 5 | 0.5 nH | 0.5 nH | 0.1 pF | 0.5 nH | |
| 6 | 0.5 pF | 0.1 nH | 0.7 nH | 0.1 pF | |
| 7 | 0.5 nH | 0.5 nH | 0.5 nH | 0.1 pF | |
| 8 | 0.5 pF | 0.1 pF | 0.1 nH | 0.7 nH | |
| References | Substrate Radius, r (mm) | Max. Height, h (mm) | Operating Frequency, f (GHz) | Peak Gain (dBi) | |S1,1| (dB) |
|---|---|---|---|---|---|
| [13] | 60.34 | 30.34 | 2.48 | 7 | N/A |
| [14] | 246 | 71 | 0.87 | 6.99 | −12.2 |
| [15] | 60 | 30 | 2.50 | 5.67 | −11 |
| [18] | 120 | 30.60 | 2.40 | 5.70 | −15 |
| [19] | N/A | 40.5 | 2.20 | 7.73 | N/A |
| [21] | 56 | N/A | 3.50 | 7 | −19 |
| [22] | 400 | 200 | 0.60 | 9 | N/A |
| [23] | 121.2 | N/A | 2.45 | 5.21 | N/A |
| [30] | 140 | 26 | 2.40 | 8.44 | −16 |
| This | 100 | 27.2 | 2.49 | 8.17 | −24.90 |
| Lumped Ports | ||||||||
|---|---|---|---|---|---|---|---|---|
| ESPAR-1 | ESPAR-2 | |||||||
| #1 | #2 | #3 | #4 | #1 | #2 | #3 | #4 | |
| 0.15 pF | 0.45 nH | 0.45 nH | 0.45 nH | 0.2 pF | 0.45 nH | 0.45 nH | 0.45 nH | |
| 0.45 nH | 0.2 pF | 0.45 nH | 0.45 nH | 0.3 pF | 0.45 nH | 0.45 nH | 0.45 nH | |
| 0.45 nH | 0.1 pF | 0.1 pF | 0.45 nH | 0.1 pF | 0.2 pF | 0.45 nH | 0.45 nH | |
| 0.45 nH | 0.45 nH | 0.2 pF | 0.45 nH | 0.45 nH | 0.2 pF | 0.45 nH | 0.45 nH | |
| 0.45 nH | 0.45 nH | 0.45 nH | 0.15 pF | 0.2 nH | 0.2 pF | 0.45 nH | 0.45 nH | |
| 0.45 nH | 0.45 nH | 0.45 nH | 0.15 pF | 0.2 nH | 0.45 nH | 0.2 pF | 0.45 nH | |
| 0.1 pF | 0.45 nH | 0.45 nH | 0.1 pF | 0.45 nH | 0.45 nH | 0.1 pF | 0.1 pF | |
| 0.2 pF | 0.45 nH | 0.45 nH | 0.45 nH | 0.45 nH | 0.45 nH | 0.45 nH | 0.3 pF | |
| Ref. | Array type | Array (n × m) | Frequency (GHz) | Gain (dBi) |
|---|---|---|---|---|
| [27] | Patch | 1 × 8 | 1.80 | 7.32 |
| [30] | Patch | 2 × 1 | 2.40 | 9.22 |
| [38] | Patch | 1 × 8 | 28 | 6.99–10 |
| [40] | Patch | 1 × 2 | 5.80 | 9.19 |
| [41] | Patch | 2 × 2 | 24 | 8.5 |
| This | ESPAR | 1 × 2 | 2.40–2.50 | 9.95–11.4 |
| Parameters | Value |
|---|---|
| Frequency | 2.45 GHz |
| Tag antenna power, | 25 dB |
| Reader antenna gain, | 10 dB, 11.40 dB |
| Tag antenna gain, | 8 dB |
| Path loss, | −2 dB |
| Path loss factor, n | 2 |
| Related Works | Sensor System with Antenna | Localization Technique | SIR/RSS Analysis, Range (m) |
|---|---|---|---|
| Mezzanotte, P. et al. [4] | Sensor system with angular slot patch antenna | No | Yes, the peak operating range is 5 m |
| Ding, W. et al. [13] | Sensor application only | Non-convex position | Yes, not specified |
| Zhang, Y. et al. [15] | Sensor application only | Linear technique | Yes, no estimated range |
| Xu, B et al. [16] | Only sensor system model | No | Yes, range is about 20 m |
| Mekelleche, F. et al. [18] | Sensor model only | Trilateration, Bounding Box, APSAoA | No |
| Ying, J. et al. [25] | No | CRLB technique | Yes, operating range is 15 m |
| Kumar, D. et al. [26] | Yes | No | Yes, opting range is 25 m |
| A. Alanezi et al. [29] | No | MVPA algorithm | Yes, the range is 4.3 m |
| Khosla, D. et al. [32] | Yes | No | No |
| Wang. Q. et al. [33] | Yes | Relative | RSS relatively compared |
| Benes, F. et al. [34] | Yes | No | Yes, the range is 10 m |
| This proposed | Yes | BSM | Yes, range more the 25 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.M.; Ryu, H.-G. IoT Sensor Network Using ESPAR Antenna Based on Beam Scanning Method for Direction Finding. Sensors 2022, 22, 7341. https://doi.org/10.3390/s22197341
Rahman MM, Ryu H-G. IoT Sensor Network Using ESPAR Antenna Based on Beam Scanning Method for Direction Finding. Sensors. 2022; 22(19):7341. https://doi.org/10.3390/s22197341
Chicago/Turabian StyleRahman, Md. Moklesur, and Heung-Gyoon Ryu. 2022. "IoT Sensor Network Using ESPAR Antenna Based on Beam Scanning Method for Direction Finding" Sensors 22, no. 19: 7341. https://doi.org/10.3390/s22197341