

A Direct Position Determination Method Based on Subspace Orthogonality in Cross-Spectra under Multipath Environments

Abstract
:1. Introduction
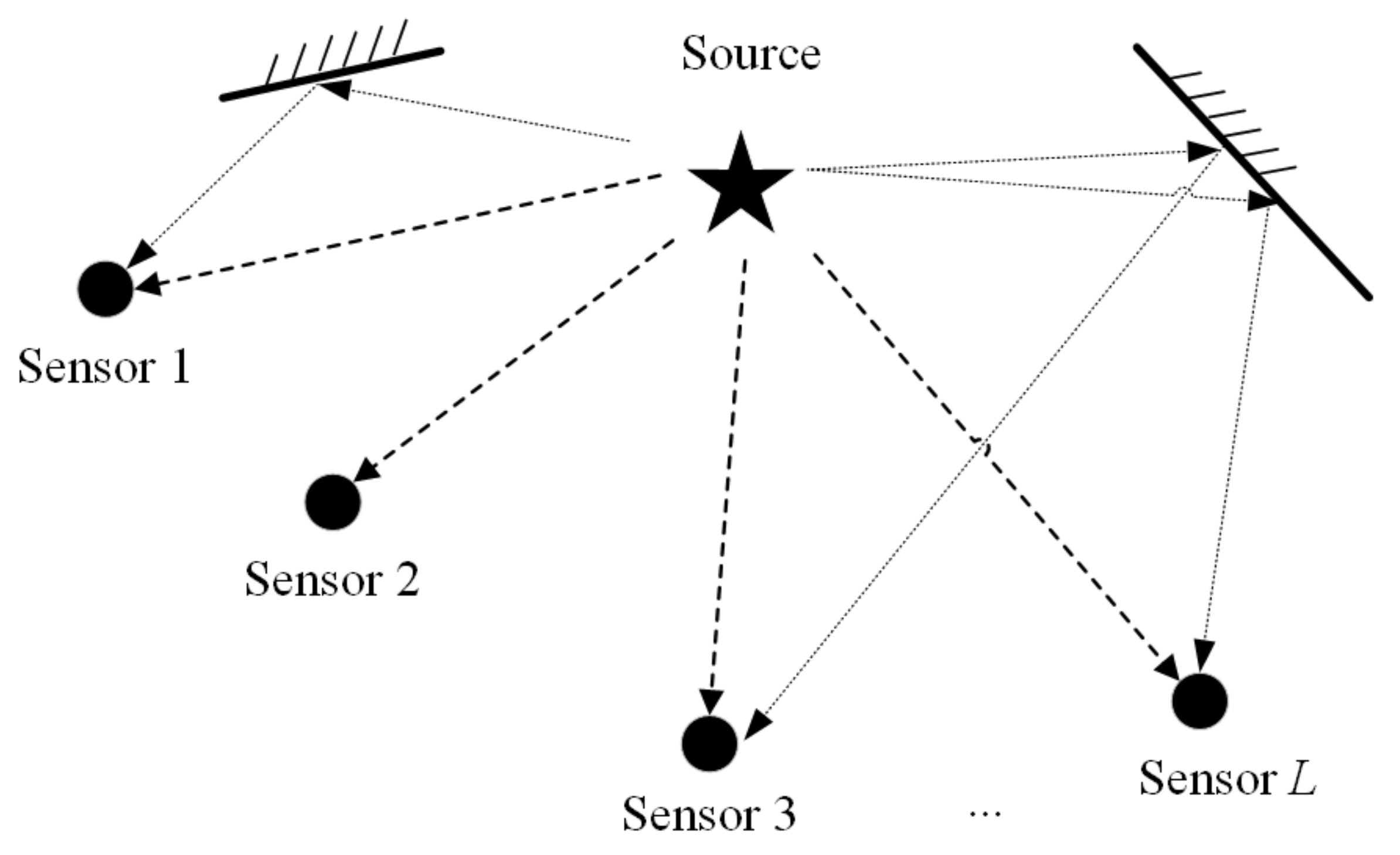
2. Signal Model
3. Proposed Scheme
3.1. Data Pre-Processing
3.2. A DPD Method Based on Subspace Orthogonality in Cross-Spectra
3.3. Detailed Procedures
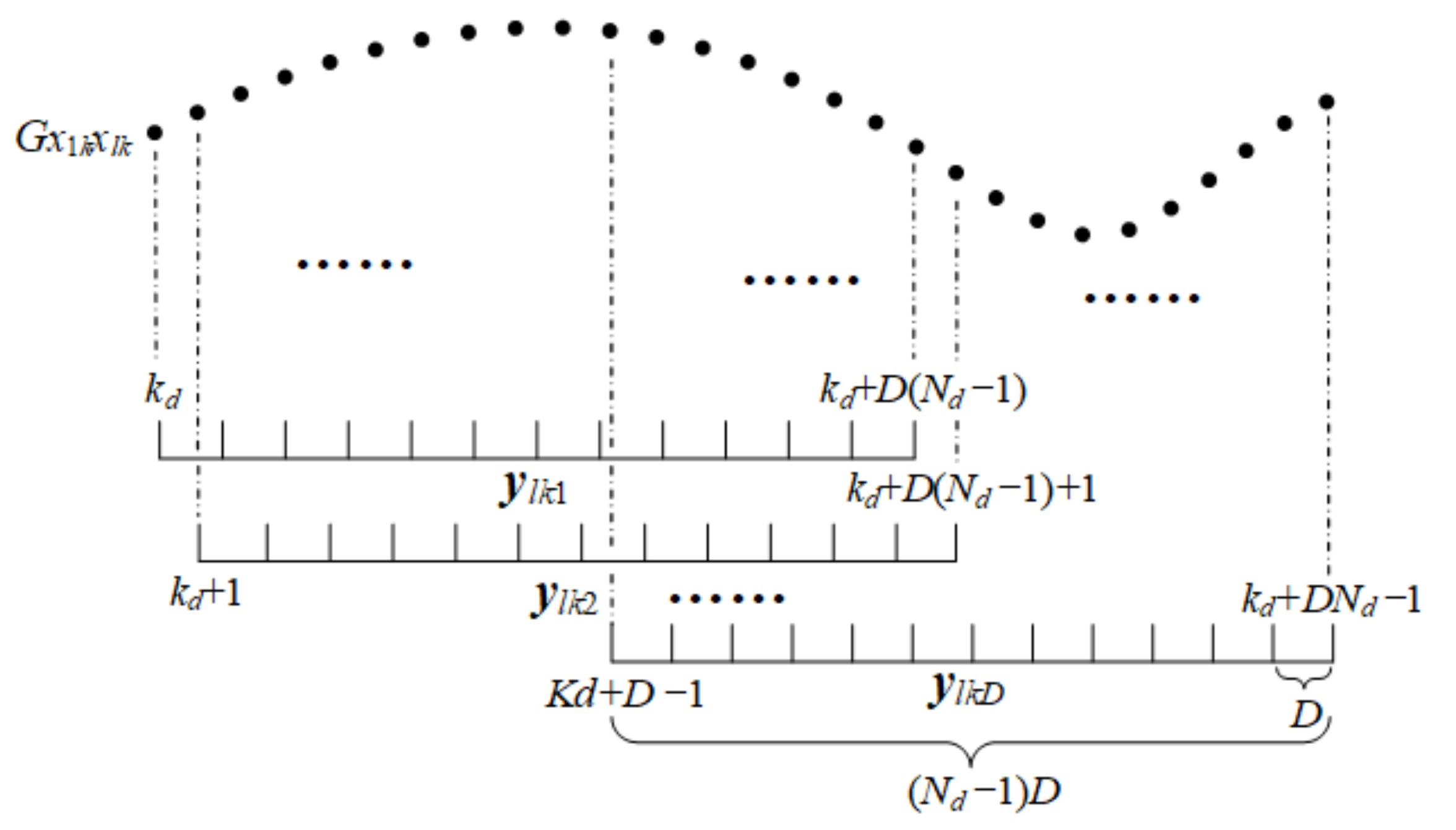
- Data pre-processing: The reference signal is selected and the received long data are segmented as in Equation (3);
- Acquisition of cross-spectra: The cross-correlation between l-th segmented received data and the reference data is calculated in Equation (5); then, the cross-spectrum is obtained by performing DFT to . In order to reduce the influence of interference, the effective parts in the cross-spectra are selected in Equation (8). In a multipath environment, spatial smoothing is used to avoid the data coherence in Equation (24);
- Construction of cost function and estimation of the source position: The noise subspace is obtained by eigen-decomposition to the screened cross-spectrum. Choose the area of positioning and build the cost function in Equation (20) at each grid point based on the orthogonal relationship between noise and signal subspace. Then the estimation of the target source is obtained by searching the spectral peak of values of the cost functions at all points.
4. Performance Analysis
4.1. Complexity Analysis
4.2. Simulation Results
4.3. Real-World Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DPD | Direct Position Determination |
| TDOA | Time Difference of Arrival |
| DOA | Direct of Arrival |
| TOA | Time of Arrival |
| RSS | Received Signal Strength |
| TDE | Time Delay Estimation |
| GCC | Generalized Cross-correlation |
| ML | Maximum Likelihood |
| MMSE | Minimum Mean Square Error |
| MUSIC | MUltiple SIgnal Classification |
| FPGA | Field Programmable Gate Array |
| DL | Deep Learning |
| CNN | Convolutional Neural Network |
| CIR | Channel Impulse Response |
| SNR | Signal-to-Noise Ratio |
| SDF | Subspace Data Fusion |
| MDF | Multi-array Data Fusion |
| QPSO | Quantum-behaved Particle Swarm Optimization |
| MVDR | Minimum Variance Distortionless Response |
| MLE | Maximum Likelihood Estimation |
| LFM | Linear Frequency Modulation |
| STFT | Short Time Fourier Transform |
| HT | Hough Transform |
| EM | Expectation-Maximization |
| FT | Fourier Transform |
| NCS | Normalized Cross-Spectrum |
| AIC | Akaike Information Criterion |
| MDL | Minimum Description Length |
| DFT | Discrete Fourier Transform |
| QAM | Quadrature Amplitude Modulation |
| RMSE | Root Mean Square Error |
| CDF | Cumulative Distribution Function |
References
- Jie, Z.; Dong, Z.; Huang, X.; Shi, X. Continuous passive TDOA location method based on multi-flight-vehicle cooperation. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 2972–2976. [Google Scholar]
- Avitabile, G.; Florio, A.; Coviello, G. Angle of Arrival Estimation Through a Full-Hardware Approach for Adaptive Beamforming. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 3033–3037. [Google Scholar] [CrossRef]
- Mestre, X.; Vallet, P. On the Resolution Probability of Conditional and Unconditional Maximum Likelihood DoA Estimation. IEEE Trans. Signal Process. 2020, 68, 4656–4671. [Google Scholar] [CrossRef]
- Lin, J.; Ma, X.; Yan, S.; Hao, C. Time-Frequency Multi-Invariance ESPRIT for DOA Estimation. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 770–773. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Y.; Chargé, P. Improved Coprime Linear Array Configuration for Moving Platform in DOA Estimation. IEEE Commun. Lett. 2021, 25, 470–473. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, S.; Chen, C.L.P. TOA-Based Passive Localization in Quasi-Synchronous Networks. IEEE Commun. Lett. 2014, 18, 592–595. [Google Scholar] [CrossRef]
- Krishnaveni, B.V.; Reddy, K.S.; Reddy, P.R. An Introduction to the TOA measurement for UWB indoor localization Systems. In Proceedings of the 2021 5th Conference on Information and Communication Technology (CICT), Kurnool, India, 10–12 December 2021; pp. 1–4. [Google Scholar]
- Zang, L.; Shen, C.; Zhang, K.; Xu, L.; Chen, Y. Research on Hybrid Algorithm Based on TDOA. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 539–542. [Google Scholar]
- Zhou, R.; Sun, H.; Li, H.; Luo, W. Time-difference-of-arrival Location Method of UAV Swarms Based on Chan-Taylor. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 1161–1166. [Google Scholar]
- Ran, Q.; Feng, N.; Yu, N.; Wu, Y. A weighted least squares source localization algorithm using TDOA measurements in wireless sensor networks. In Proceedings of the 2016 6th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 June 2016; pp. 10–13. [Google Scholar]
- Chen, M.; Zhao, J.; Wang, X. An Optimal Algorithm Design of RSSI Indoor Location based on Neural Network. In Proceedings of the 2020 International Conference on Artificial Intelligence and Computer Engineering (ICAICE), Beijing, China, 23–25 October 2020; pp. 84–88. [Google Scholar]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Lee, B.; Said, A.; Kalker, T.; Schafer, R.W. Maximum Likelihood Time Delay Estimation with Phase Domain Analysis in the Generalized Cross Correlation Framework. In Proceedings of the 2008 Hands-Free Speech Communication and Microphone Arrays (HSCMA), Trento, Italy, 6–8 May 2008; pp. 89–92. [Google Scholar]
- Masmoudi, A.; Bellili, F.; Affes, S.; Stephenne, A. A Non-Data-Aided Maximum Likelihood Time Delay Estimator Using Importance Sampling. IEEE Trans. Signal Process. 2011, 59, 4505–4515. [Google Scholar] [CrossRef]
- Soltanmohammadi, E.; Dastgerdi, S.M.H.; Rezaie, A.H. DSP Implementation of Time Delay Estimation Based on Bufferable Average Square Difference Matrix. In Proceedings of the 2010 12th International Conference on Computer Modelling and Simulation, Cambridge, UK, 24–26 March 2010; pp. 227–232. [Google Scholar]
- Zhu, Q.; Zhao, Z.; Mao, K.; Chen, X.; Liu, W.; Wu, Q. A Real-Time Hardware Emulator for 3D Non-Stationary U2V Channels. IEEE Trans. Circuits Syst. I Reg. Pap. 2021, 68, 3951–3964. [Google Scholar] [CrossRef]
- Bellili, F.; Amor, S.B.; Affes, S.; Samet, A. A new importance-sampling ML estimator of time delays and angles of arrival in multipath environments. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 4219–4223. [Google Scholar]
- Zhong, S.; Xia, W.; Song, J.; He, Z. Super-resolution time delay estimation in multipath environments using normalized cross spectrum. In Proceedings of the 2013 International Conference on Communications, Circuits and Systems (ICCCAS), Chengdu, China, 15–17 November 2013; pp. 288–291. [Google Scholar]
- Ge, F.X.; Shen, D.; Peng, Y.; Li, V.O.K. Super-Resolution Time Delay Estimation in Multipath Environments. IEEE Trans. Circuits Syst. I Reg. Pap. 2007, 54, 1977–1986. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Rangarao, K.V.; Venkatanarasimhan, S. gold-MUSIC: A Variation on MUSIC to Accurately Determine Peaks of the Spectrum. IEEE Trans. Antennas Propag. 2013, 34, 2263–2268. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Real-Time Distance Evaluation System for Wireless Localization. IEEE Trans. Circuits Syst. I Reg. Pap. 2020, 67, 3320–3330. [Google Scholar] [CrossRef]
- Niitsoo, A.; Edelhäußer, T.; Mutschler, C. Convolutional Neural Networks for Position Estimation in TDoA-Based Locating Systems. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Feigl, T.; Eberlein, E.; Kram, S.; Mutschler, C. Robust ToA-Estimation using Convolutional Neural Networks on Randomized Channel Models. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret De Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar]
- Weiss, A.J. Direct position determination of narrowband radio frequency transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Li, J.; He, Y.; Zhang, X.; Wu, Q. Simultaneous Localization of Multiple Unknown Emitters Based on UAV Monitoring Big Data. IEEE Trans. Industr. Inform. 2021, 17, 6303–6313. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. Advances in direct position determination. In Proceedings of the Processing Workshop Proceedings, 2004 Sensor Array and Multichannel Signal, Barcelona, Spain, 18–21 July 2004; pp. 584–588. [Google Scholar]
- Zhang, X.; Wang, Q.; Huang, Z.; Yuan, N.; Hu, W. Direct Position Determination of Emitters using Single Moving Coprime Array. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 23–25 October 2021; pp. 1–5. [Google Scholar]
- Huang, Z.; Wu, J. Multi-array Data Fusion Based Direct Position Determination Algorithm. In Proceedings of the 2014 Seventh International Symposium on Computational Intelligence and Design (ICSID), Hangzhou, China, 13–14 December 2014; pp. 121–124. [Google Scholar]
- Tirer, T.; Weiss, A.J. High Resolution Direct Position Determination of Radio Frequency Sources. IEEE Signal Process. Lett. 2016, 23, 192–196. [Google Scholar] [CrossRef]
- Pokrajac, I.P.; Vucic, D.; Okiljevic, P. Direct position determination of wideband signals: Coherent and noncoherent approach. In Proceedings of the 2013 11th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 16–19 October 2013; pp. 77–80. [Google Scholar]
- Hao, K.; Chen, J.; Wan, Q. Direct Position Determination of Indoor Radio Sources Using Hybrid Antenna Arrays. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–5. [Google Scholar]
- Hao, K.; Wan, Q. An Efficiency-improved Tdoa-based Direct Position Determination Method for Multiple Sources. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4425–4429. [Google Scholar]
- Vankayalapati, N.; Kay, S.; Ding, Q. TDOA based direct positioning maximum likelihood estimator and the cramer-rao bound. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1616–1635. [Google Scholar] [CrossRef]
- Li, S.; Qi, C.; Zhang, Y. A Low Computation Direct Position Determination Based on TDOA. In Proceedings of the 2021 3rd International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 10–12 December 2021; pp. 63–67. [Google Scholar]
- Qi, S.R.; Yuan, C.S.; Liang, B.J.; Gao, L.; Li, H.; Sun, H. A Direct Position Determination Method for Four-station TDOA Location System. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Chen, F.; Zhou, T.; Yi, W.; Kong, L.; Zhai, B. Passive direct position determination of multiple emitters transmitting unknown LFM signals. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1129–1133. [Google Scholar]
- Ma, F.; Liu, Z.M.; Guo, F. Direct Position Determination in Asynchronous Sensor Networks. IEEE Trans. Veh. Technol. 2019, 68, 8790–8803. [Google Scholar] [CrossRef]
- Niitsoo, A.; Edelhäußer, T.; Eberlein, E.; Hadaschik, N.; Mutschler, C. A Deep Learning Approach to Position Estimation from Channel Impulse Responses. Sensors 2019, 19, 1064. [Google Scholar] [CrossRef] [PubMed]
- Wen, F.; Shi, J.; Zhang, Z. Generalized spatial smoothing in bistatic EMVS-MIMO radar. Signal Process. 2022, 193, 108406. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Complexity |
|---|---|
| Proposed | |
| DPD-MUSIC-DET | |
| TDOA-MUSIC-NCS | |
| TDOA-GCC-SCOT |
| Method | Proposed | DPD-MUSIC-DET | TDOA-MUSIC-NCS | TDOA-GCC-SCOT |
|---|---|---|---|---|
| Operation time (s) | 1.585086 | 162.280677 | 0.371173 | 0.005917 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Jiang, H.; Huo, Y.; Yu, Q.; Li, J. A Direct Position Determination Method Based on Subspace Orthogonality in Cross-Spectra under Multipath Environments. Sensors 2022, 22, 7245. https://doi.org/10.3390/s22197245
Zhu K, Jiang H, Huo Y, Yu Q, Li J. A Direct Position Determination Method Based on Subspace Orthogonality in Cross-Spectra under Multipath Environments. Sensors. 2022; 22(19):7245. https://doi.org/10.3390/s22197245
Chicago/Turabian StyleZhu, Kehui, Hang Jiang, Yuchong Huo, Qin Yu, and Jianfeng Li. 2022. "A Direct Position Determination Method Based on Subspace Orthogonality in Cross-Spectra under Multipath Environments" Sensors 22, no. 19: 7245. https://doi.org/10.3390/s22197245