1. Introduction
Cooperative control problems of MASs have been widely studied [
1,
2,
3]. As a fundamental topic of cooperative control of MASs, the containment control problem has been investigated in recent years. The containment control problem considers that there are multiple leaders in the network and all followers can converge to the convex hull formed by the leaders. Containment control algorithms for MASs with different dynamics have been proposed [
4,
5,
6,
7]. For example, for both continuous-time and discrete-time MASs, Liu et al. [
4] presented the necessary and sufficient conditions which guarantee the achievement of containment control. Considering the heterogeneous agents, Zheng et al. [
5] further studied the containment problem of heterogeneous MASs composed of first-order and second-order integrator agents. Moreover, the containment control problem for MASs with general linear dynamics has also been studied [
6,
7].
In the practical application, many industrial processes achieve the tasks in a repetitive environment, such as robot manipulators and injection molding process [
8]. For systems that repeat the operation process over a finite time interval, the iterative learning control (ILC) was studied [
9,
10,
11,
12,
13]. The control method uses the error between the current trajectory and the desired trajectory to improve the control performance. Then, it can achieve the desired trajectory tracking through learning from the repetitive tracking task. The ILC has been used for solving various cooperative problems of MASs [
14,
15,
16,
17,
18,
19]. Yang et al. [
14] solved the consensus tracking problem of MASs with time-varying dynamics by the ILC method. Meng et al. [
15] further studied the consensus tracking problem of MASs with initial state shifts and disturbances by the ILC method. In addition to the consensus tracking problem, the ILC has also been used to solve the formation control problem of MASs [
17,
18,
19]. For example, Li et al. [
18] proposed the distributed ILC protocols for solving the consensus and formation problem of second-order MASs.
Most of the above mentioned papers mainly used model-based control methods to design the controller. However, modeling a practical plant is an approximation of the real plant. As the complexity of system increases, it becomes more difficult to establish the accurate model. Even if an accurate model is established, it may be very complicated due to many parameters. This will make the controller be more complicated and less robust. Motivated by the above questions, for nonlinear systems, Hou [
20] first proposed the model-free adaptive control (MFAC), which effectively avoids the disadvantages caused by the complexity of the real systems. The MFAC is a data-driven control method, which only uses input and output (I/O) data of systems to design the controller. The MFAC method has been employed to solve many control problems for discrete-time nonlinear systems due to its advantages [
21,
22,
23]. Taking advantages of the MFAC and the ILC, the MFAILC method was proposed for the repeated operating systems for which it is difficult to establish the model. Recently, the MFAILC method has been applied for solving the control problems of MASs [
24,
25,
26,
27,
28]. For example, Bu et al. [
24] solved the consensus tracking problem of MASs under the fixed and the iteration-varying topologies by a MFAILC method. In contrast to [
24], Wang et al. [
25] used the MFAILC algorithm to solve the consensus tracking problem of MASs with unknown disturbance. For this problem, Zhao et al. [
28] further analyzed the MASs with sensor saturation and measurement disturbance by the MFAILC algorithm. Considering the existence of multiple leaders, Hua et al. [
27] studied the containment control problem of MASs with unknown nonlinear dynamics by the event-triggered MFAILC method. The aforementioned papers mainly consider the cooperative interaction among agents in the network. It is worthwhile to note that the antagonistic (e.g., the hostile or distrustful) interaction among individuals is ubiquitous [
29,
30]. Generally, the cooperative and antagonistic interactions among agents can be characterized by the signed network, where the negative (positive) edge represents the antagonistic (cooperative) interaction between agents. Altafini [
29] pointed out that, if the signed network is structurally balanced, then the bipartite consensus can be achieved. Meng [
31] further studied the bipartite containment tracking problem for linear systems. Additionally, there are many studies considering signed networks [
32,
33].
To the best of our knowledge, the MFAILC method is rarely considered for the bipartite containment tracking problem of MASs. In this paper, we will study the bipartite containment tracking problem for a class of nonlinear discrete-time MASs with unknown dynamics by the MFAILC method. In contrast to the linear systems considered in [
31], in our paper, the nonlinear discrete-time MASs with unknown dynamics is considered, where each agent runs in a repetitive environment over a finite time interval. The main contributions are described as follows. First, for the model-free MASs, we establish a dynamical linear relationship between two iterations of each agent. That is, a dynamic linearization data model is equivalent to the initial nonlinear MASs. Second, by the dynamic linearization method, we propose a MFAILC. The controller design only needs I/O data of MASs and does not need other model information. Finally, we propose the condition for solving the bipartite containment problem of MASs. To verify the effectiveness of the MFAILC method, a simulation is given. The simulation shows that our proposed MFAILC method can solve the bipartite containment problem of MASs.
Notation: Let R and represent the sets of real numbers and -dimensional real matrices, respectively. and I denotes the identity matrix with appropriate dimensions. denotes 1-norm, and represents the absolute value.
3. Main Result
In this part, we will show the controller and the condition in which the bipartite containment control is achieved.
We assume that agent
i,
, is leader, and agent
i,
, is follower. The subgraph composed of
m leaders is
and the subgraph composed of
n followers is
. Then, the adjacency matrix of
is written as
where
denotes the adjacency matrix of
,
denotes the adjacency matrix of
, and
denotes the interactions among leaders and followers. The Laplacian matrix of
is written as
where
and
are Laplacian matrices associated with
and
, respectively.
,
with
,
, and
with
,
.
Definition 1. The containment error of the i-th agent at the ℏ-th iteration is denoted by . For , we havewhere is a fixed constant, for , and for . , and denotes that agent i can receive the information , otherwise . We consider that there is at least one for , and there is at least one for . for , , and for , . For , we have Containment errors of all agents in the form of vectors are written as
In order to facilitate the proof, we let
, where
The vector
is denoted by
, where
By Equation (
4), we can get
Our goal is to design a controller for MASs, so that the bipartite containment can be achieved, that is, the output states
of followers converge to the convex hull formed by the output states
of leaders and the reverse output states
of leaders. If we can prove that
for
,
for
,
for
,
for
, and
, then the bipartite containment can be achieved. If
, then we have
. Since the graph consisting of
n followers is strongly connected and
is a nonzero matrix, by the Gersgorin disc theorem and Theorem 6.2.26 in [
35], we know that zero is not an eigenvalue of
. Thus, we have
. Then, by Lemma 4 in [
36], we know that
is a nonnegative matrix and each row sum of
is one. Then, the output states of followers converge to the convex hull formed by the output states and the reverse output states of leaders. Thus, we just need to prove that the leaders in
and the leaders in
achieve a bipartite consensus, and
.
The controller for every agent is designed as
where
represents the weighting factor that will effect the stability of MASs, and
represents the parameter of controller (
10) that will affect the convergence properties.
is the estimated value of
, and
is updated by
where
and
. The following equation is the reset condition which can ensure the robustness of controller:
which holds if any of the following three equations is satisfied
Remark 1. Inspired by normalized least mean squares, we design the objective function . By the optimization condition , we can get (11). Similarly, we design the objective function . By the optimization condition , we can get (10). Theorem 1. Suppose that system (1) with controller (10) satisfies Assumptions . Then, = for , for , and = 0 if Proof. First, we prove the boundedness of
. Obviously, if
satisfies Equation (
12), the boundedness of
can be ensured. Then, we prove that, when Equation (
12) does not hold, the boundedness of
still holds. Let
represent the parameter estimation error. By Equations (
2) and (
11), we have
By Lemma 1, we have
. Then
By
and
, we have that there is a constant
q satisfying
By Equations (
14) and (
15), Equation (
13) can be written as
Since
, we have
. Thus,
is bounded. Since
is bounded and
, we conclude that
is bounded.
In order to facilitate the following proof, we consider
. By Equation (
10), we have
Then, we have
where
with
=
,
, and
. By the Cauchy-Schwarz inequality, we have
. Since
, then we have
From Assumption 3, we know that
is non-negative. By Equation (
12), we can obtain that the sign of
is the same as the sign of
. As the estimated value of
, the nonnegativity of
can be guaranteed by choosing the initial value
of
.
Next, we will prove that leaders in group
can achieve the bipartite consensus. Since
is structurally balanced,
can be divided into
and
such that
, for any
or
,
, for any
. For
i-th leader in
, by Equation (
3), we have
where
,
for any
, and
for any
. Then, Equation (
19) is written as
Then, we have
where
,
,
is the Laplacian matrix of
, and
.
Let
. By
, we have
where
. By Equations (
2), (
17) and (
21), we have
where
with
,
,
and
. Since
is structurally balanced, by Lemma 1 in [
29], there is
M such that
, where
and
. Let
, by Equation (
23), we have
Since
, we have
where
. Since
, and
is strongly connected, then matrix
is nonnegative and irreducible. Since there is at least one
, then at least one row sum of
is strictly less than one. Thus,
is an irreducible substochastic matrix. By Equation (
25), we have
matrices chosen from
are multiplied together in (
26), then by Lemma 1 in [
37], we have
where
denotes the integer which is smaller than
and closest to
, and
. By
, we have
By
, we have
which means that leaders in group
achieve bipartite consensus. That is,
for
and
for
. Similarly, leaders in group
can also achieve bipartite consensus.
Next, we prove that
. By Equations (
2) and (
8), we have
where
and
=
.
Let
. By Equation (
9), we have
Multiply both sides of Equation (
27) by
, and add
to both sides of Equation (
27), we have
By Equations (
28) and (
29), we have
It follows from Equation (
30) that
where
and
. By Equation (
27), we have
Substituting (
32) into (
31), and by Equation (
17), we have
where
with
,
.
By Equation (
18), we have
. The 1-norm of matrix
can be written as
By Assumption 1, we know
then by
, we have
.
Then,
Thus, we have
where
Since leaders in both
and
achieve bipartite consensus, we have
. By Equation (
33), we obtain
where
. By
, we have
Then, by
= 0 and Lemma 4.7 in [
38], we have
. □
4. Simulation
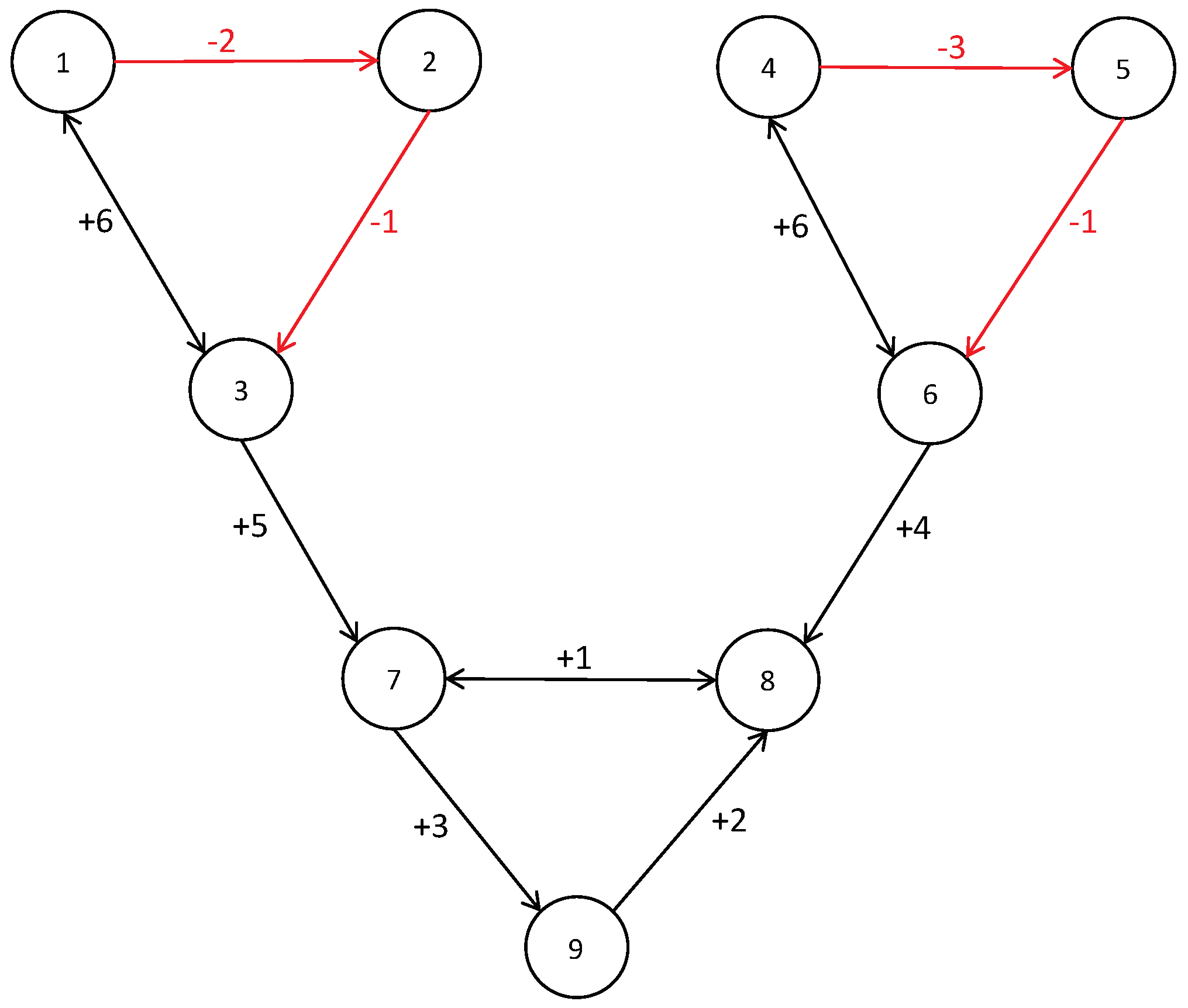
We consider a MAS which consists of 6 leaders and 3 followers. The signed graph is shown in
Figure 2 1–6 are leaders, 7–9 are followers. Moreover, the subgraph consisting of leaders
and the subgraph consisting of leaders
are structurally balanced. By the definition of adjacency matrix, we have the adjacency matrix of the signed graph shown in
Figure 2 as follows
By the definition of Laplacian matrix, we have the Laplacian matrix of signed graph shown in
Figure 2 as follows
Let
and
, where
,
, and
,
,
,
, and
for
. The dynamic of the
i-th (
) agent is written as
We choose
,
,
,
,
. It is worth noting that
is the parameter used to set the reset condition of parameter
. The initial state of each agent can be selected arbitrarily.
Figure 3 shows that the bipartite containment task has been achieved. We can find that the output states of agents
converge to the same value
, and output state of agent 2 reaches a value with the opposite sign of agents
. Similarly, the output states of agents
converge to the same value 1, and output state of agent 5 reaches a value with the opposite sign of agents
. The output states of agents 7–9 asymptotically converge to the convex hull formed by agents 1–6.
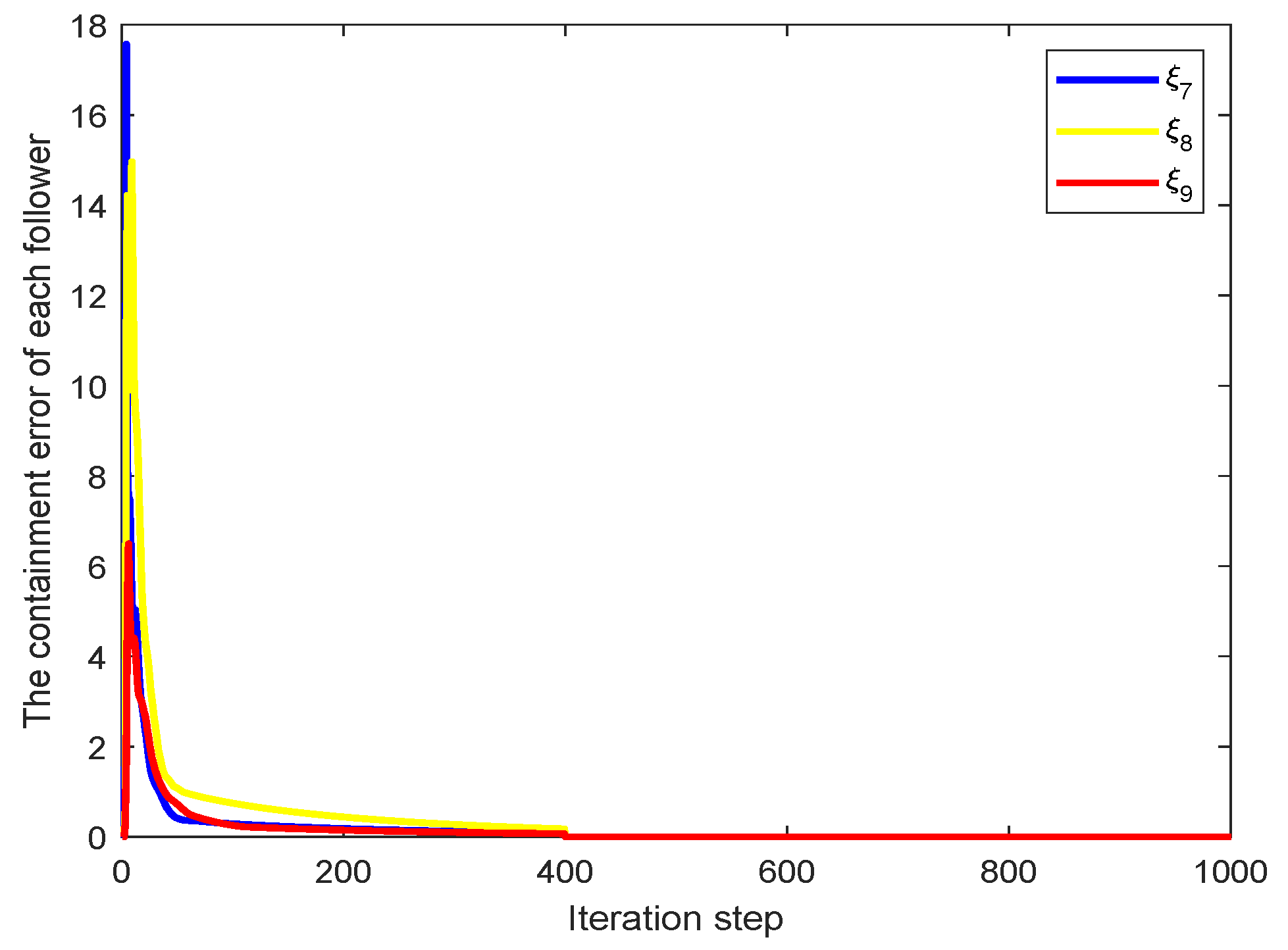
Figure 4 shows that the containment error of agents 7–9 asymptotically converges to zero as the number of iterations increases.
5. Discussion
The MFAILC is a control design method for nonlinear systems. Its basic idea is to establish an equivalent dynamic linear data model of each multi-agent system near each working point, and use the I/O data of the controlled system to estimate the partial derivatives of the system online. Then, the weighted one-step forward controller is designed by using the relationship between the MASs, and the MFAILC of nonlinear system is realized. Compared with the traditional adaptive ILC method, the model and algorithm proposed in this paper have some remarkable characteristics, as follows. First, the controller design only needs the I/O measurement data of the controlled system, without any model information. Therefore, traditional unmodeled dynamic problems do not exist under the MFAILC framework. Second, the MFAILC method has a simple structure and a small amount of computation. It does not require the construction of an accurate mathematical model of a multi-agent system, and any test signal and training process, thus it is a low-cost controller.
In the process of solving the bipartite containment problem of MASs, the existence of Assumption 1 has certain restrictions on the application of the MFAILC method. However, due to the limitation of communication bandwidth and storage space of MASs, the agent only transmits partial information. Therefore, Assumption 1 holds for some MASs. Moreover, the effect of unknown disturbances and time-varying network on the bipartite containment problem is not considered. We will solve this problem in the future. The simulations presented in this paper demonstrate the effectiveness of our proposed MFAILC method. In
Figure 4, due to the selection of the initial value, the containment error of the followers is relatively large in the first few iterations. However, with the increase of the number of iterations, the containment error asymptotically converges to zero, that is, the bipartite containment control of the MASs is achieved by using the MFAILC method.

{kind=link}
{kind=link}
{kind=link}
{kind=link}



