1. Introduction
Most of the man-made mechanical components vibrate, ranging from aircraft fuselage, structures of bridges across the sea, to micro-mechanical components, and “vibration” is a kind of energy expression. Recovering these energies and then using them in human lives has become an important part of green energy. Among them, most researchers have paid attention to the vibration energy harvester (VEH). This device can collect vibration-generated energy through a specific vehicle, and convert it into electrical energy, and the energy can also be stored and used, which can effectively solve the problem of energy consumption. Roundy et al. [
1,
2] showed that the vibration energy harvesting system has a very low duty cycle and only needs a small space to generate electricity. Erturk and Inman [
3] proposed an analytical solution of piezoelectric devices applied to cantilever beams through the assumption of a nonlinear Euler–Bernoulli beam, and analyzed the parallel and series connection of piezoelectric devices. Harne and Wang [
4] sorted out the relevant theories about the bistable energy harvester (BEH), explaining the application of the magnet repulsion and the vibration generated by the piezoelectric device to generate electricity.
Yang and Towfighian [
5] combined the bistable vibration energy harvesting system with internal resonance (IR) to make the system generate larger amplitude, thereby generating more energy. In addition, Yang and Towfighian [
6] also proposed a concept of a bistable vibration energy harvesting system with elastic energy. They added a spring to the magnet at the free end of the beam to compress and elongate the spring in the axial direction, thereby driving the magnet to obtain more potential energy. After adding the elastic energy in this way, the amplitude of the beam is further increased to obtain more electric energy. Zhou [
7] et al. installed a magnet at the end of an elastic metal, and a pair of magnets with different magnetic poles were mounted on the base opposite to the magnet. By controlling the angle of the magnet on the base to excite the elastic metal, a bistable energy harvesting system was formed. Wu et al. [
8] proposed an accurate theoretical model of the voltage and displacement parameters based on Lenz’s law. The factors affecting the voltage and displacement parameters in the theoretical model were analyzed. However, the accurate nonlinear system frequency was not provided.
Wang et al. [
9] proposed the concept of using slapping force to generate more electrical energy conversion. They used two elastic steel sheets to slap (clap) piezoelectric devices, and verified each one with nonlinear theory and experiments. Wang et al. [
9,
10] found that slapping the piezoelectric patch can achieve a higher power generation effect. By exciting higher modes frequencies on the VEH system, it can achieve higher power generation benefits. Among them, since the deformation of the elastic steel is extremely large, which has exceeded the range that can be simulated by the linear assumption, it is necessary to use nonlinear theory to analyze the vibration behavior of the beam.
Wang and Chu [
11] proposed an energy harvesting system that collects the downward airflow from a helicopter or a multi-axis unmanned rotary-wing aircraft and uses the wind force to drive the magnet installed on a windmill to generate repulsive force on a pair of elastic steel sheets. Their clapping VEH system causes the double elastic steel system to clap each other and vibrate periodically in order to generate more electricity than the traditional energy harvesting system. However, they found that the elastic steel of this system cannot match the beating frequency of the elastic steel when the high-frequency windmill rotates, resulting in poor power conversion efficiency when the airflow velocity is too high. This technical note proposes two improved methods based on the model of Wang and Chu [
11]: (1) In [
11], it is mentioned that the elastic steel cannot match the frequency of the periodic vibration and the frequency of the magnetic field fluctuation, so there will be irregular slaps. This situation can be solved by simply adjusting the length of the elastic steel. (2) In [
11], the excitation frequency of elastic steel is a linear frequency, but for this elastic steel, its deformation has exceeded the linear range, so its nonlinear frequency should be considered. Wang et al. [
12] proposed a VEH system with rotational magnetic excitation. Through the rotation of the shaft blade, the intermittent magnetic force between the driving magnet and the tip magnetic mass drives the PZT to vibrate nonlinearly. They found that with two driving magnets and 8 mm radial excitation distances, the proposed system captures energy efficiently. Hassan et al. [
13] developed a triboelectric vibration energy harvester under rotational magnetic excitation for wind energy harvesting applications. Similar to the work of Wang and Chu [
11] and Wang et al. [
12], the triboelectric beam generates electricity using the magnetic impact-induced vibration. A single-degree-of-freedom model is used to simulate the generated electrical power. Ambrozkiewicz et al. [
14] considered a nonlinear electromagneto system with the rotational magnetic pendulum for energy harvesting. The modelling of electromagnetic effects in different magnets positions was performed by the finite element method (FEM). The experimental results were verified with numerical simulations. The proposed model for the rotational pendulum was used to prove the broadband frequency effect. Enayati and Asef [
15] gave a review and analysis of magnetic energy harvester (MEH) applications in a wireless sensor network (WSN). They also provided a case study for feeding navigational sensors mounted on a rotating wheel of vehicles. Their results demonstrated the applicability of their proposed model in specialized applications. Gunn et al. [
16] proved that the rotational vibrations can be converted into relatively small but useful amounts of electrical energy that can power wireless sensors. Their experimentally tested device is demonstrated to power a wireless temperature sensor transmitting data every 2 s for a range of more than 1000 rpm of the shaft rotational speed. He et al. [
17] proposed a magnetically excited rotating piezoelectric energy harvester with multiple piezoelectric beams connected in series to generate output voltages in excess of 15 V at frequencies below 13 Hz. These research studies proposed various VEH systems that utilize rotating magnetic fields to excite PZTs. Whether analyzing the weight of the magnet or various applications, the excitation frequency is ultimately used to excite the system. However, none of them discuss which excitation frequency is the best. In the present study, the theoretical nonlinear frequency of the nonlinear beam is obtained by the dimensional analysis method, and the rotational speed of the wheel is adjusted to obtain the precise repulsion force of the rotating magnetic field on the elastic steel.
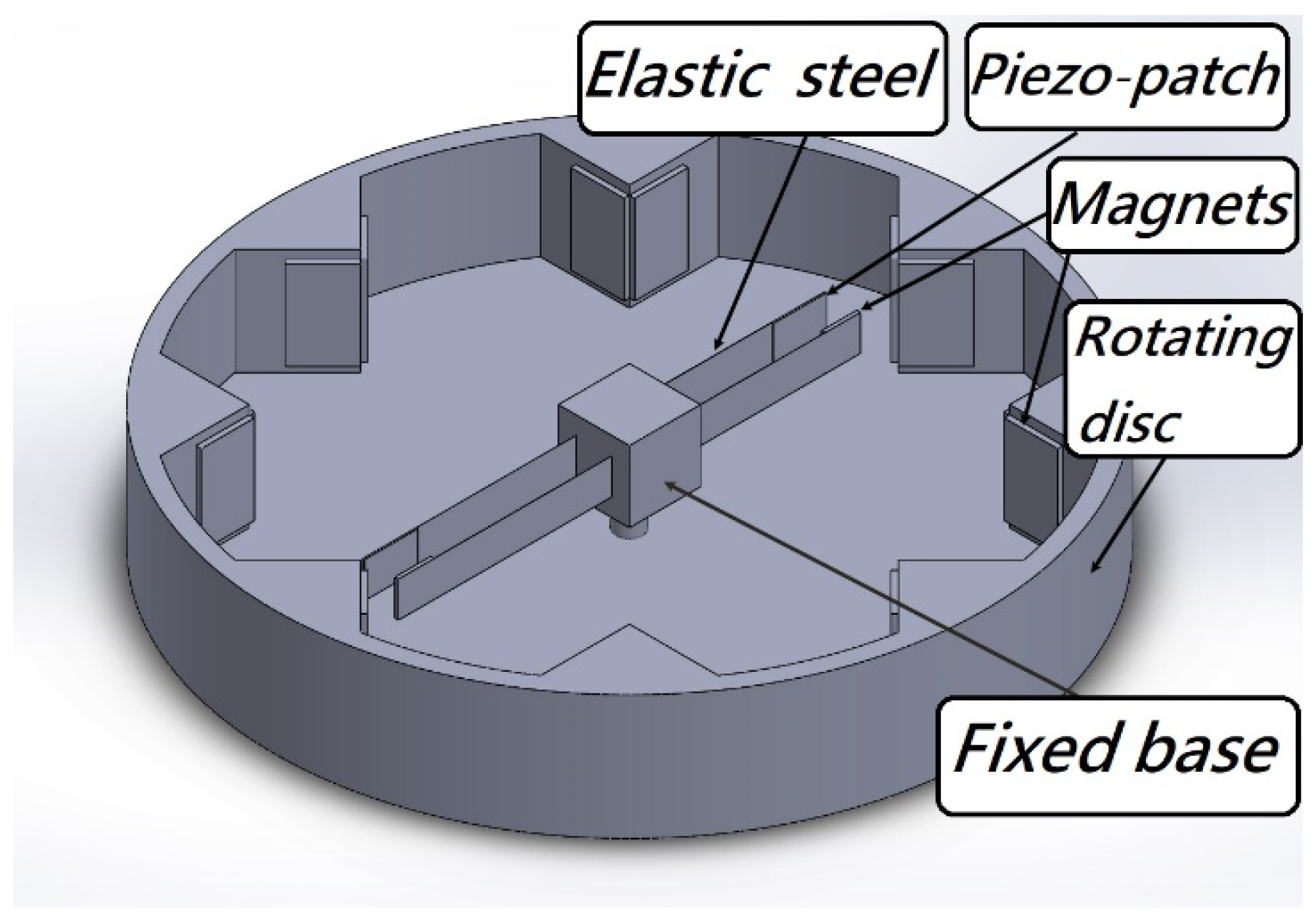
The classical VEH system considers the analysis of vibration, but the power generation effects actually depend on the vibration amplitude and the force on the PZT. Therefore, it is a necessary part of the analysis to accurately excite the system and make it generate larger electric energy. In this study, in addition to the establishment and analysis of the VEH nonlinear theoretical model, the correctness of the theory is verified by experiments. The nonlinear system frequencies are derived by dimensional analysis and used to excite the CVEH system. We use the disk to simulate the situation of the rotating wheel (
Figure 1), and attach magnets around the disk, so that the magnetic poles can be exchanged when the disk rotates, and then the magnets on the fixed-free beam with a tip mass will be repulsive, so that this beam can be swung periodically by magnetic force. It is worth noting that the device in
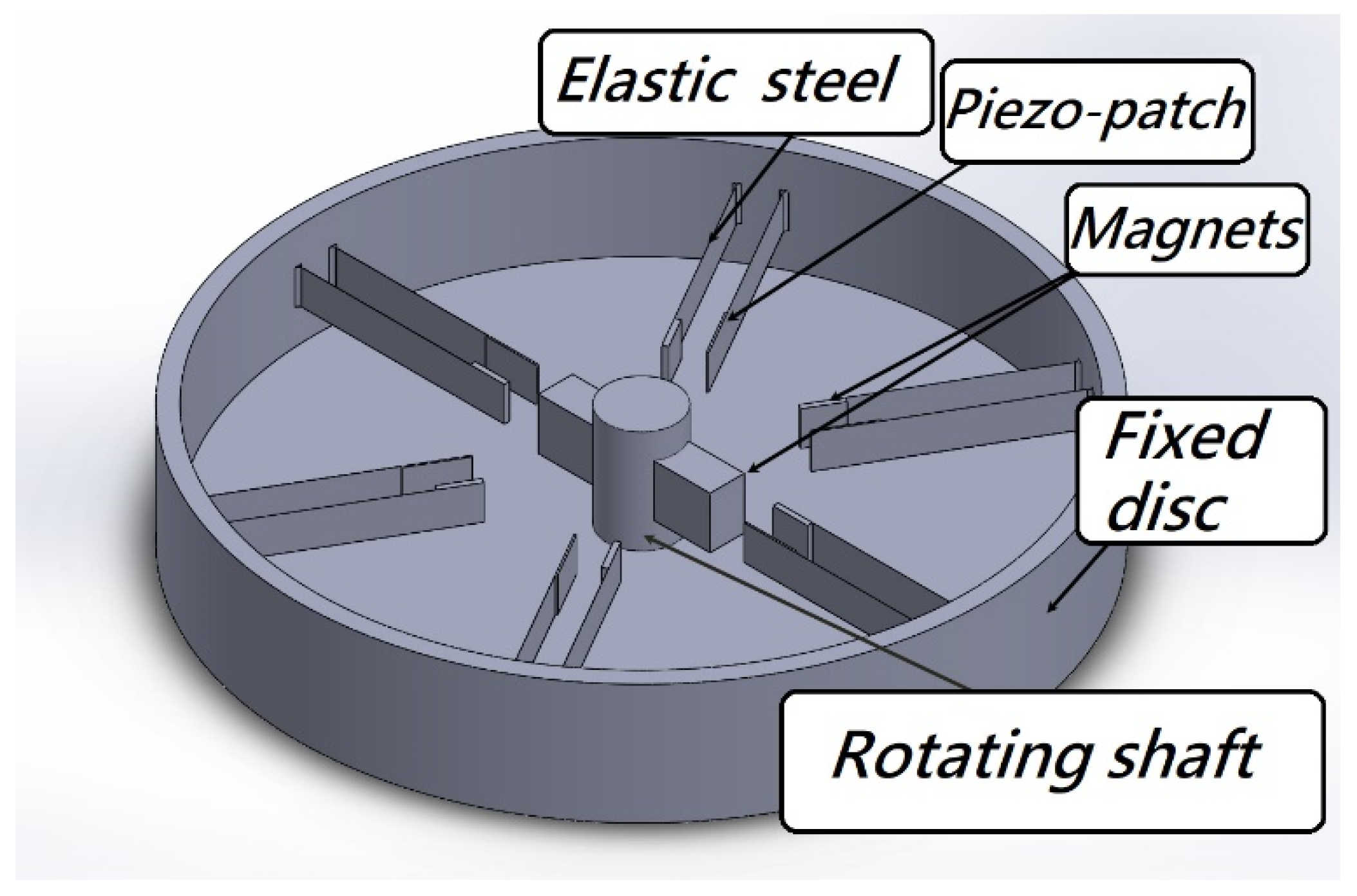
Figure 1 can also be reversed, as shown in
Figure 2, so that each group of double elastic steel systems is fixed on the outer ring of the disc, and the magnet is placed in the middle of the turntable. When the wheel rotates, the steel sheet will also be affected by the magnet, which will cause the steel sheet to swing and generate electricity. This system can make more groups of PZT generate electricity at the same time, and can also be installed on the transmission shaft of the tail boom of the helicopter. The systems of
Figure 1 and
Figure 2 are only used to show that the concept of the rotating magnetic field can be applied to these two types of systems. The basic principle they used is to employ a rotating magnetic field to excite two pieces of elastic steel and slap each other to generate more electricity. It is believed that it can produce greater economic benefits in the industry.
The theoretical CVEH system is shown in
Figure 3, one of which is a fixed-free beam with a tip mass (magnet), and the other is a fixed-free beam with a PZT patch. The CVEH system proposed in this study directly exerts force (
) on the piezoelectric device through the effect of slapping, which will enable this design to break through the current bottleneck of energy conversion in the vibration energy harvesting system, and exert a greater function of the VEH system.
4. Discussion
According to the current equation (Equation (8)), the following voltage function can be obtained:
Based on the length of the piezoelectric patch, and the length of the elastic steel sheet, we substitute the MKS unit into Equation (56) for calculation, and use the fourth-order Runge–Kutta method to solve Equation (11), and obtain the theoretical value of the voltage output. The voltage outputs excited by the linear frequency and the nonlinear frequency in each mode are plotted respectively, and then the root mean square is taken. The theoretical root mean square is compared with the experimental root mean square to confirm the feasibility of this model.
Figure 14 is the theoretical output voltage generated by the 1st and 2nd modes of the “linear frequency” of the CVEH system after substituting the dimensional value and solved by the RK-4 method.
Figure 15 is the experimental voltage generated by the “linear frequency” of the CVEH 1st and 2nd modes.
Figure 16 is the theoretical output voltage generated by the 1st and 2nd modes of the “nonlinear frequency” of the CVEH system after substituting the dimensional value and solved by the RK-4 method.
Figure 17 is the experimental voltage generated by the “nonlinear frequency” of the CVEH 1st and 2nd modes. The results are compared in
Table 1 and
Table 2.
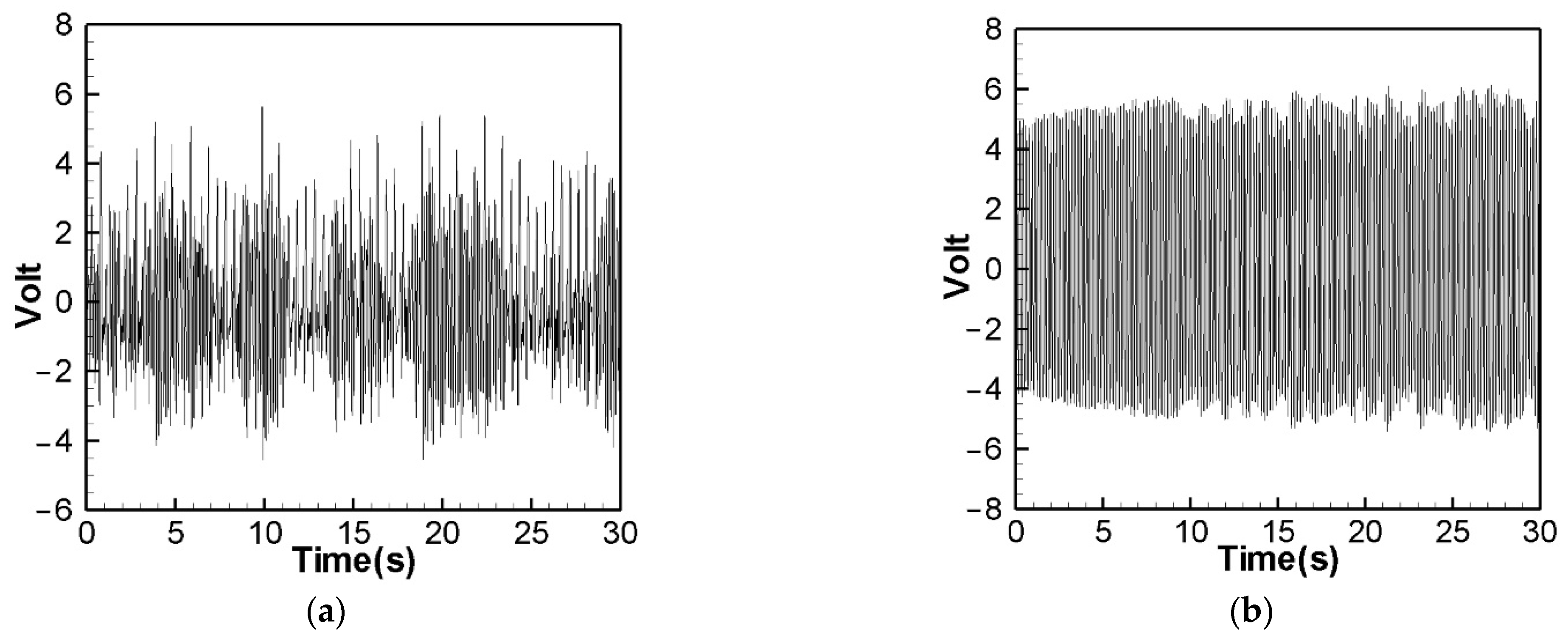
According to
Figure 14a, the theoretical voltage of the 1st mode is between +3 V and −3 V, and its RMS (root mean square) value is 1.8866 V. According to
Figure 15a, the RMS value obtained from the experiment is 1.8208 V, the error is 3.61%. The theoretical voltages, experimental output voltages, and relative errors of the other mode are shown in
Table 1.
Figure 16a shows the theoretical voltage outputs generated by the “nonlinear frequency” of the first mode of the CVEH system.
Figure 17a shows the experimental voltage outputs of the 1st mode generated by the “nonlinear frequency”. According to
Figure 16a, the theoretical voltage of the first mode is between +4 V and −4 V, and its RMS value is 2.1143 V, which is different from the experimental value (
Figure 17a), which is 2.1074 V, the error is 3.26% (
Table 2). The voltage outputs of the 2nd mode can be found in
Figure 14b,
Figure 15b,
Figure 16b,
Figure 17b. The results and errors can be found in
Table 1 and
Table 2. Compared with the error of the 1st and 2nd modes of Wang and Chu [
11] (6~9.2%), the method proposed in this technical note (errors are of 3.26~4.9%) can obtain excellent results. The power outputs of the linear and nonlinear frequency excitations of this CVEH are listed in
Table 1 and
Table 2, respectively. For the Mode 1 case, the power output efficiency of nonlinear frequency to linear frequency excitation is from 0.29678 mW to 0.2223 mW, an increase of 33.5%. For the Mode 2 case, the power output efficiency of nonlinear frequency to linear frequency excitation is from 1.0168 mW to 0.8103 mW, an increase of 25.3%. We also compare the efficiency in voltage output between elastic steels of different modes for linear and nonlinear frequency inputs. According to the experimental results from
Table 1 and
Table 2, the efficiency of nonlinear frequency excitation to linear frequency and for Mode 1 and Mode 2 is to increase by 15.7% and 6.4%, respectively.
Looking at the above, no matter what kind of system it is, the higher the mode, the better the power generation efficiency, and exciting the system’s nonlinear frequency obviously makes the amplitude larger, so it has a better power generation effect than the linear frequency excited CVEH system.
5. Conclusions
This research takes the fixed-free beam with a tip mass as the main frame model to analyze its vibration mode and energy harvesting system. Based on the model of Wang and Chu [
11], this technical note proposes two improved methods: (1) By adjusting the length of the elastic steel sheet (7.5 cm) to solve the problem of irregular slaps; (2) In this study, the theoretical nonlinear frequency of the system was obtained by the dimensional analysis method. Adjust the rotating speed of the wheel to obtain the precise excitation frequency for the elastic steel. Better power generation efficiency can be obtained.
Compared with the 1st and 2nd modes of Wang and Chu [
11], the error is about 6~9.2%. Based on the method proposed in this technical note, the error of its 1st and 2nd modes is about 3.26~4.9%, and excellent results can be obtained.
The output voltage of the high mode is higher than the output voltage of the low mode. The CVEH system proposed in this study, through the effect of clapping, directly exerts force on the piezoelectric patch, which can be applied to the shafts of automobiles or motorcycles, and can also be used as the transmission shaft in the tail boom of a helicopter, which is of great application value. Furthermore, the purpose of this note is to suggest improvements to the authors’ previous research. This study also provides two improvement methods which are “theoretical nonlinear frequency function” and “the proper elastic steel length”. In particular, the theoretical solution of nonlinear frequencies is a result that no one has proposed so far. This originality is believed to be enough to contribute to the field of VEH research. This kind of CVEH design can break through the energy conversion bottleneck of the vibration system of the single piezoelectric patch of the current vibration energy harvesting system, and can play a greater function of the VEH system.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}