1. Introduction
Substation equipment is an essential part of the power system [
1]. Once defects exist in operating equipment, an abnormal temperature usually occurs at the defective parts, triggering thermal failures that can lead to local equipment burnout or even more severe electric power accidents [
2]. Therefore, timely and accurate detection of defects in substation equipment is of great significance to the safety and stability of a power system.
Many methods have been studied for defects detection in substation equipment, including dielectric loss measurement [
3], UHF (ultra-high frequency) method [
4], FDR (frequency domain reflectometry) method [
5], and infrared image-based methods [
6,
7]. The dielectric loss measurement requires off-line preventive testing, which will delay the operation of substation equipment. The complexity of the UHF method makes directly locating defective regions difficult. The FDR method is sensitive only to defects caused by moisture. Early infrared image-based methods for detecting thermal defects in substation equipment require manual intervention, which is time-consuming and costly. However, with the development of smart grids and the successful application of substation inspection robots, a large number of on-site infrared images needed to be inspected urgently. Intelligent defect detection methods have emerged based on computer vision.
Due to the redundant background and the densely packed targets, applying automatic intelligent defect detection methods directly is difficult. Thus, extracting the target equipment in the complex infrared images is required first. Early researchers studied the methods using traditional digital image processing techniques, including threshold-based, region-based, and edge-based methods. Threshold-based methods separate the foreground from the background of an image by selecting a suitable threshold [
8], which is simple and efficient but susceptible to noise interference, causing poor robustness. A typical region-based method is the watershed algorithm [
9]. It uses the local minima of the image gradient to form a specific region to segment different image parts. However, it is sensitive to the color changes in the object’s surface, giving rise to over-segmentation. Edge-based methods extract edge features from the image by edge detection operators such as the Sobel operator [
10] and Canny operator [
11] to realize the segmentation of an image. Nevertheless, it cannot guarantee the existence of closed, continuous edge regions, and it lacks robustness to noise interference. The recent rapid development of deep learning and imaging technologies has brought innovative ideas for extracted methods from infrared images of substation equipment. Instance segmentation is a classic task in the field of computer vision, which can perform object extraction excellently in images. This task, not only locates and classifies all instances but also segments each instance from the images [
12]. Many applications benefit from accurate instance segmentation, including electrical systems [
13,
14], autonomous driving [
15], robotics [
16,
17], and intelligent transportation systems [
18]. Consequently, instance segmentation has become an active research topic in the industry, which benefits its powerful ability of object extraction. Xiong et al. [
19] proposed a method based on Mask R-CNN and Bayesian context network to recognize power equipment, which is considered the relationship between objects in a complex background. Ling et al. [
20] presented a novel deep learning framework to locate the broken insulators, which is address the problem of low signal-noise-ratio (SNR) setting. To detect the transmission line, a transmission line detection (TLD) algorithm is proposed [
21], which is a multitask deep neural network with branched outputs. The deep learning-based methods show excellent performance to extract the target object.
In the stage of defect detection, some promising methods for detecting defects are feature extraction and convolutional neural networks. The key to feature extraction-based approaches is acquiring target ontology features and using classifiers to recognize the extracted features [
22,
23]. However, the effectiveness of feature extraction and the selection of classifiers are great dependence on personal experience. Convolutional neural networks focus on detecting target defects through an object detection model [
24,
25]. Li et al. [
26] proposed a method of insulator defect location, which is cascades detection and segmentation networks from two levels. In view of the characteristics of insulator defects, Wang et al. [
27] presented an improved network to detect the defect of aerial insulator photos. The above method achieved excellent results in defect detection, but requires numerous defective insulator images to train the DCNN. In reality, the infrared images of defective substation equipment are difficult to acquire, and the performance of DCNN is difficult to guarantee. Implementing defect detection of substation equipment in infrared images is still challenging. In an infrared image, the different parts of the target corresponding to different heat generation characteristics. Thus, the temperature feature of the target is used to estimate temperature probability density distribution, which is used to identify defects by the presented strategy. The proposed defect detection part is an unsupervised learning method and is not limited by the dataset. Before that, the superpixel processing is used to provide more details, those details offer more information for defect detection. Meanwhile, it reduces the complexity and time spent on the model.
This study proposes the TDDM for defect detection in electric power substations, which is used in infrared images of substation equipment, e.g., insulator, current transformer, lightning arrester, bushing and voltage transformer. The main contributions of this paper are as follows.
- (1)
Inspecting the substation equipment from the infrared images with the redundant background and the densely packed targets directly is difficult. The proposed TDDM extracted the target firstly, and then, defect analysis is conducted on a single instance, which is converted to a two-level detection problem.
- (2)
Superpixel segmentation is conducted on the extracted target equipment to merge adjacent pixels with similar characteristics. The process is used to provide more details and reduce the complexity of the subsequent detection determination.
- (3)
Based on a Gaussian kernel function, the temperature probability density distribution of the target equipment is constructed, which is used in a defect determination strategy to find the defective areas in infrared images of the target substation equipment.
- (4)
The experimental results show that the proposed model accurately detects defects in substation equipment in infrared images.
The remainder of this paper is organized as follows. In
Section 2, a novel model for detecting these defects in infrared images is provided, including instance segmentation, superpixel segmentation, and defect determination.
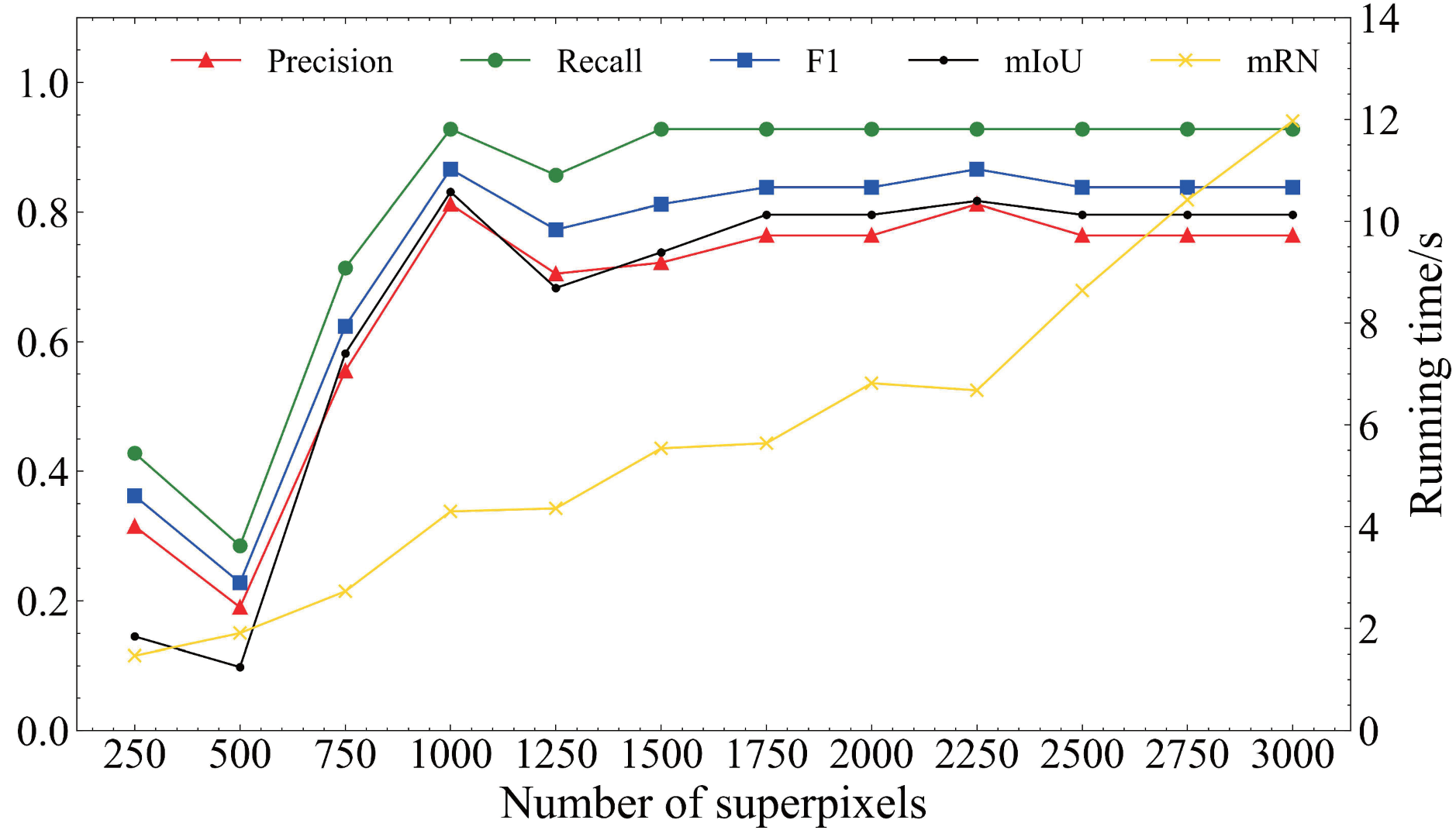
Section 3 verifies the performance of the proposed model and discusses the influences of superpixel parameters on the results.
Section 4 concludes this work.
4. Discussion
In this paper, a two-level model is proposed for the problem of defect detection in substation equipment infrared images. On the basis of extracting substation equipment in the complex background through instance segmentation and superpixel segmentation methods, and realizing defect detection of substation equipment through temperature probability density distribution calculation and adaptive defect detection strategy. Compared with the traditional manual inspection, the proposed method can reduce the resources of labor and material; compared with the end-to-end deep learning method, the presented method in this paper does not require many defect datasets. The operating status of the substation equipment is closely relevant to the stability of the power system, which makes the defects detection of the substation equipment significant.
In the future, our research will not be limited to the substation equipment in this paper and will be applied to other electrical equipment. In fact, according to the characteristic of infrared thermal imaging, the majority of electrical equipment infrared images will show a certain temperature probability density distribution, which is the physical characteristic. The proposed method is based on this characteristic to detect defects precisely. Thus, based on this physical characteristic, we believe the method will be applicable to other cases where may occur defects in electric power, such as medical equipment, airplanes, and industrial equipment.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}