

Full-Scale Fire Smoke Root Detection Based on Connected Particles

Abstract
:1. Introduction
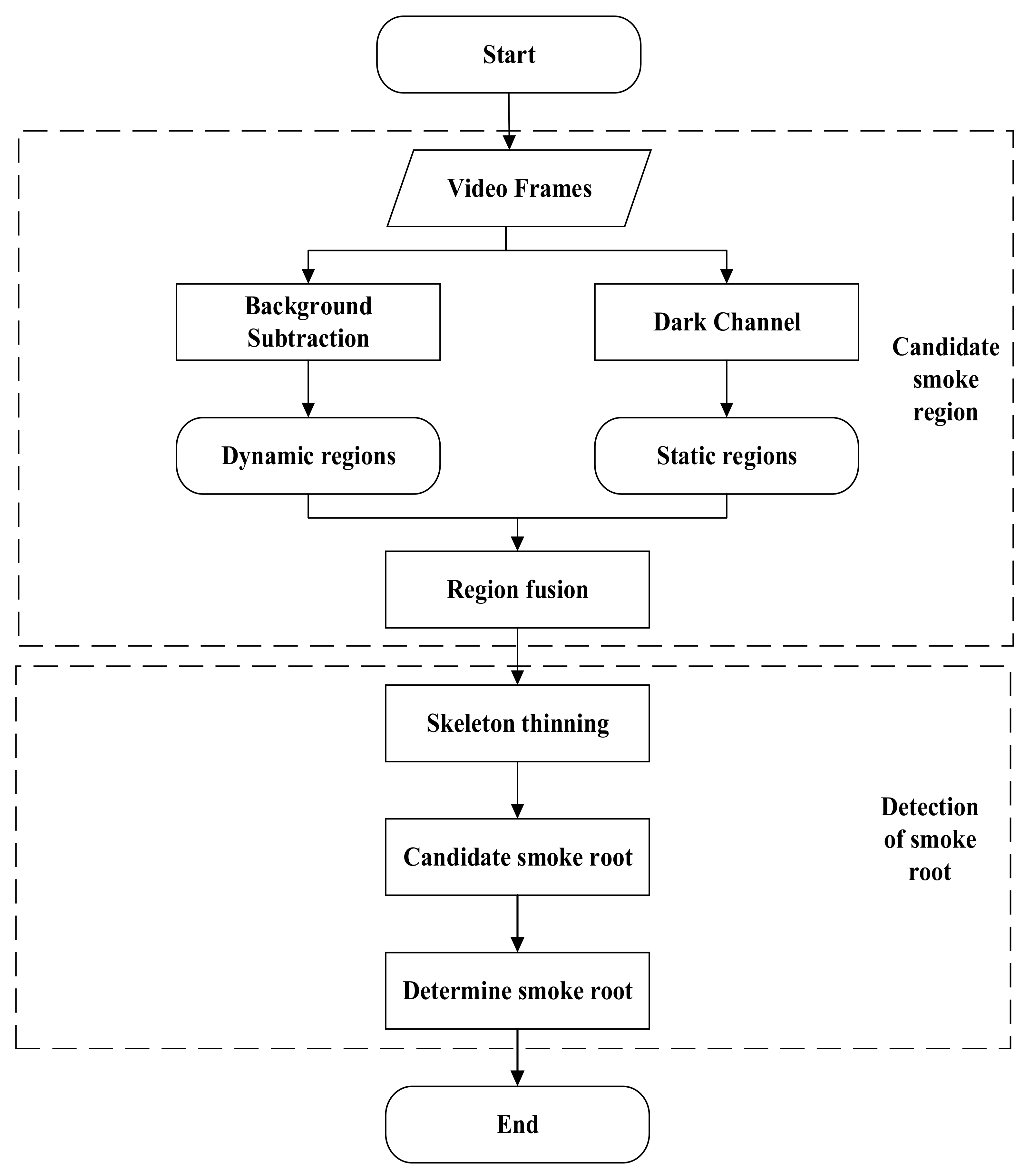
2. Methodology
2.1. Dynamic Candidate Region Extraction
2.2. Static Candidate Region Extraction
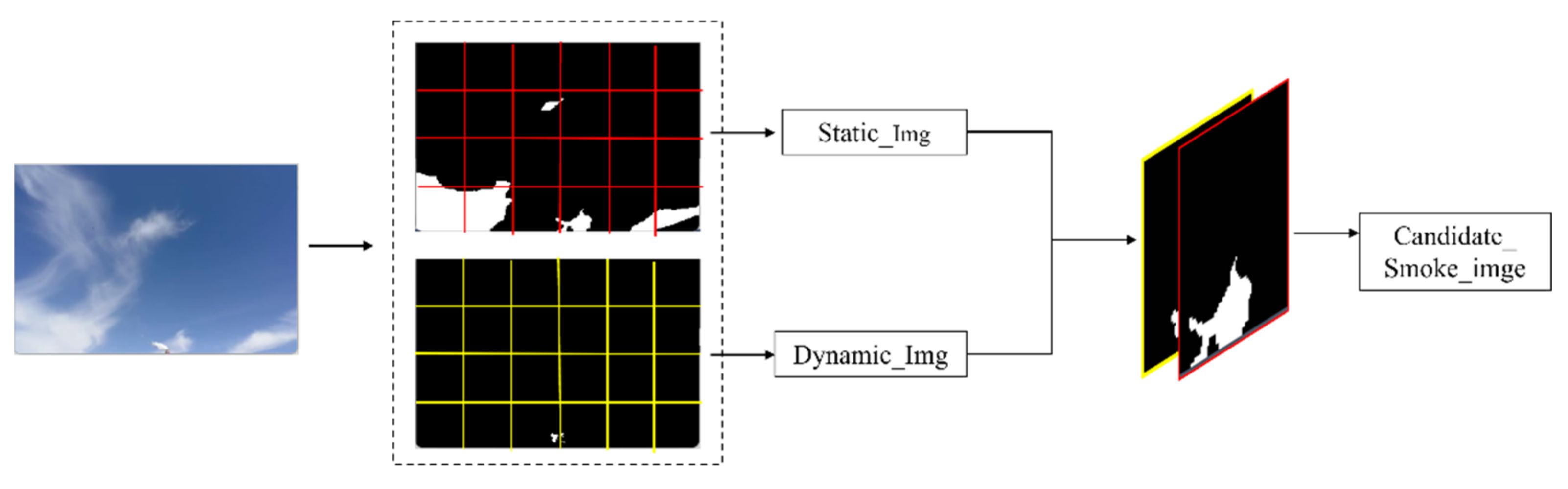
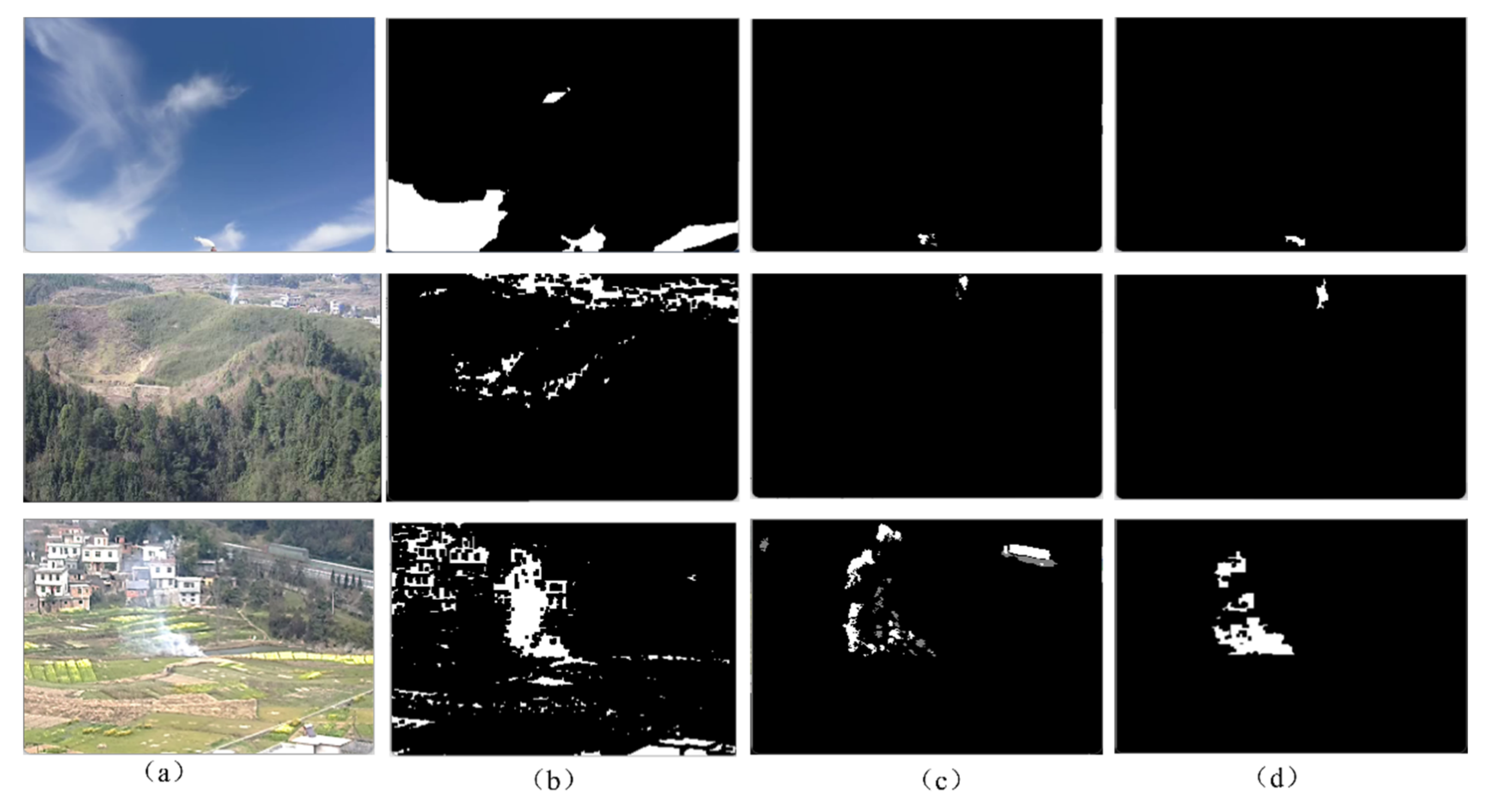
2.3. Region Fusion
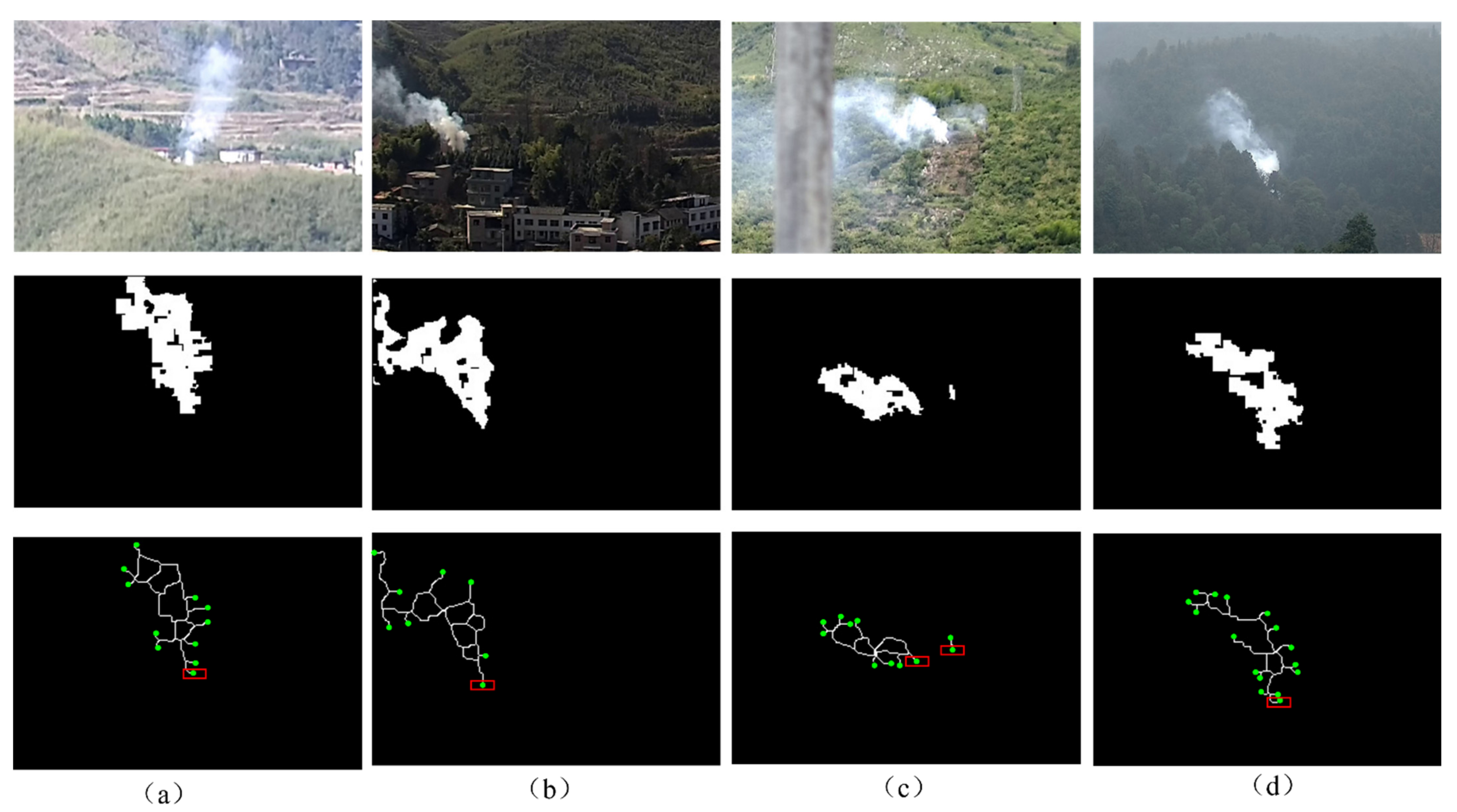
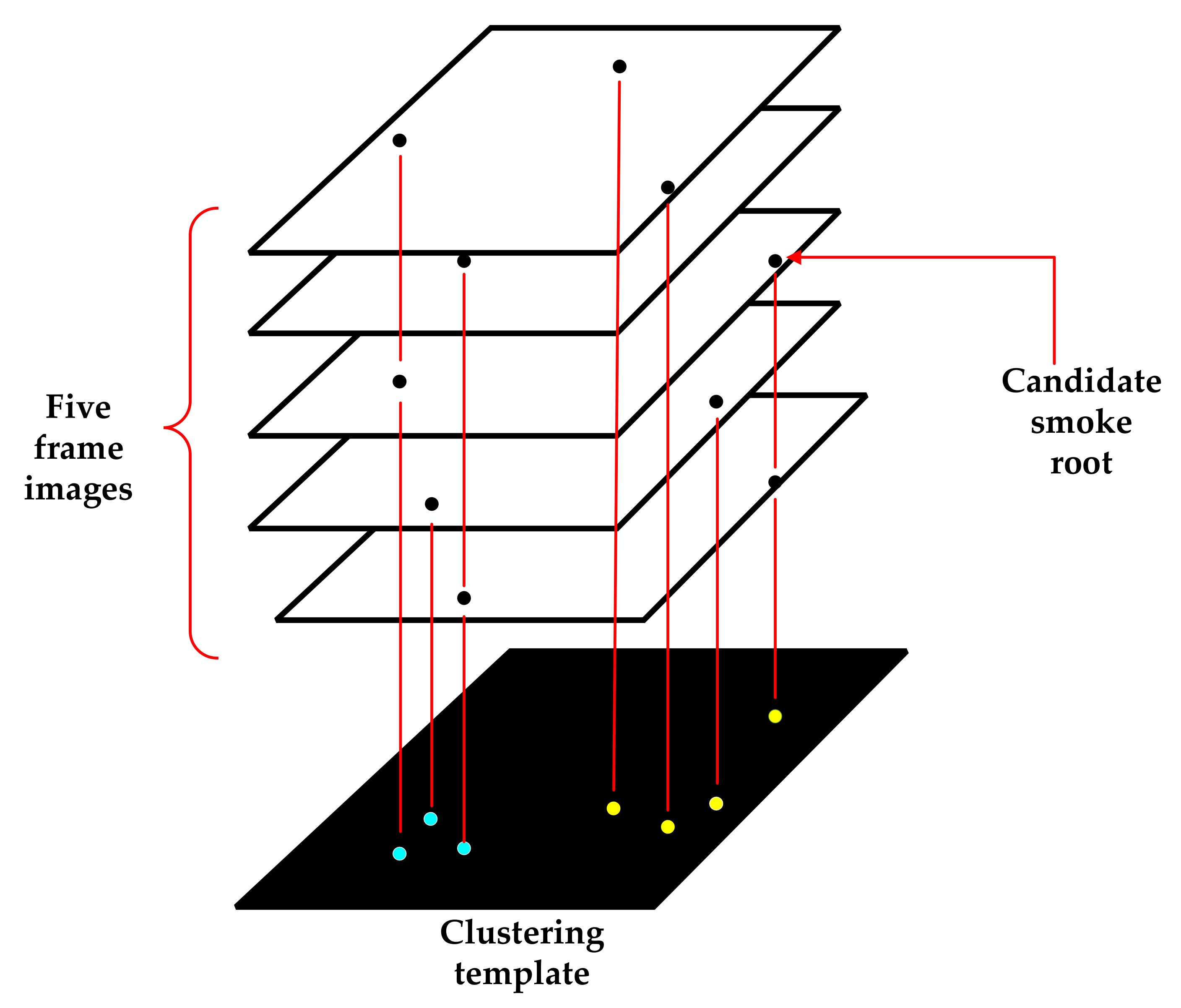
2.4. Extraction of Skeleton Points
2.5. Calculation of Smoke Root
- The total number is not more than three; thus, we exclude this area.
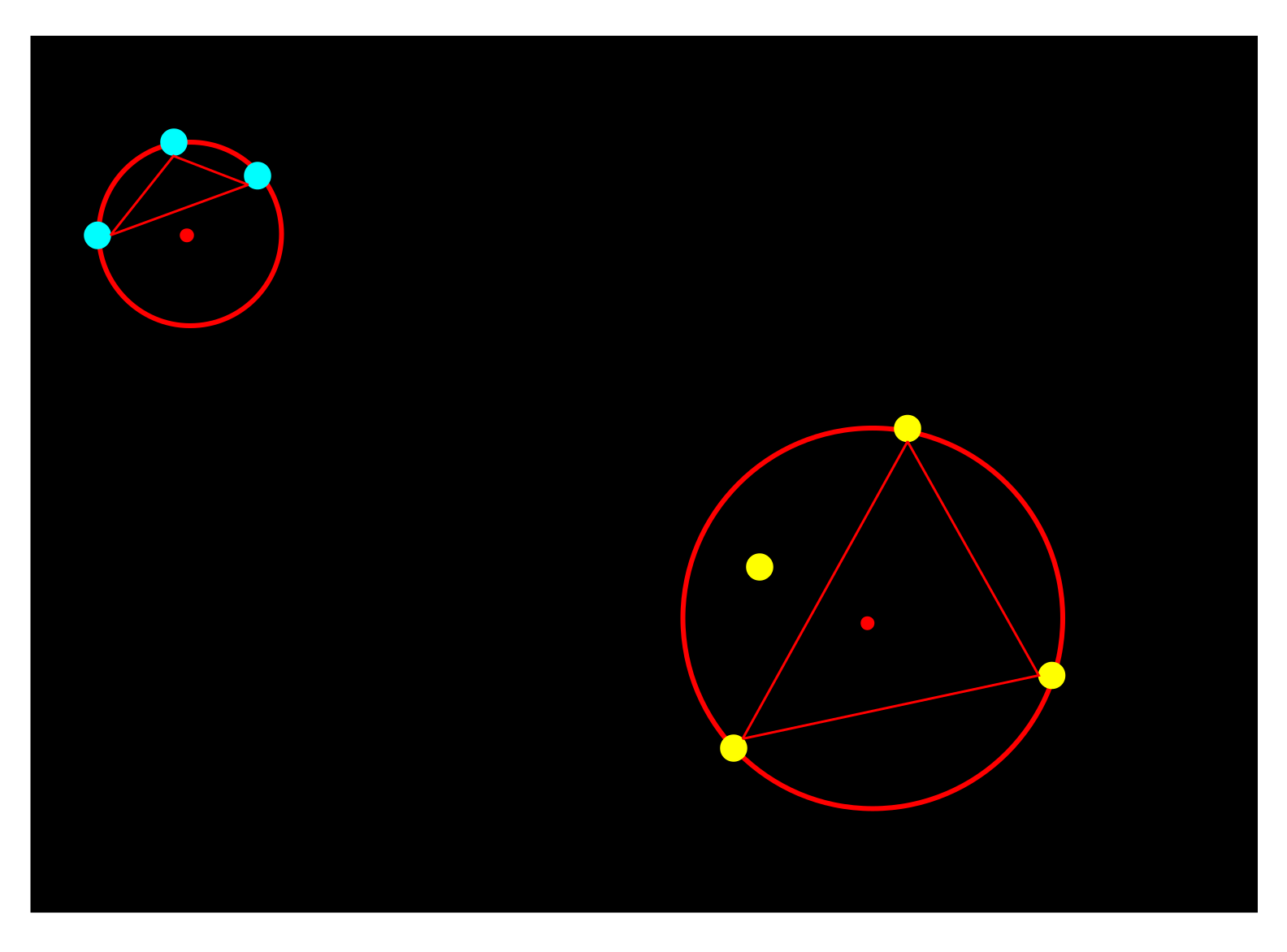
- If the total number is greater than three, and the number of overlapping points is less than three, according to all the endpoint information of this type, we find the center and radius of the circumcircle, as shown in Figure 6. If the radius of the circumcircle is greater than the threshold, the area is excluded. Otherwise, the area represented by this category is a smoke area, and the coordinates of the center of the circumscribed circle are the coordinates of the node representing the root of the smoke.
- If the total number is greater than three, and the number of overlapping points is greater than three, the most overlapping points represent the coordinates of the smoke root node.
3. Experiments and Discussion
3.1. Fire Smoke Video Dataset
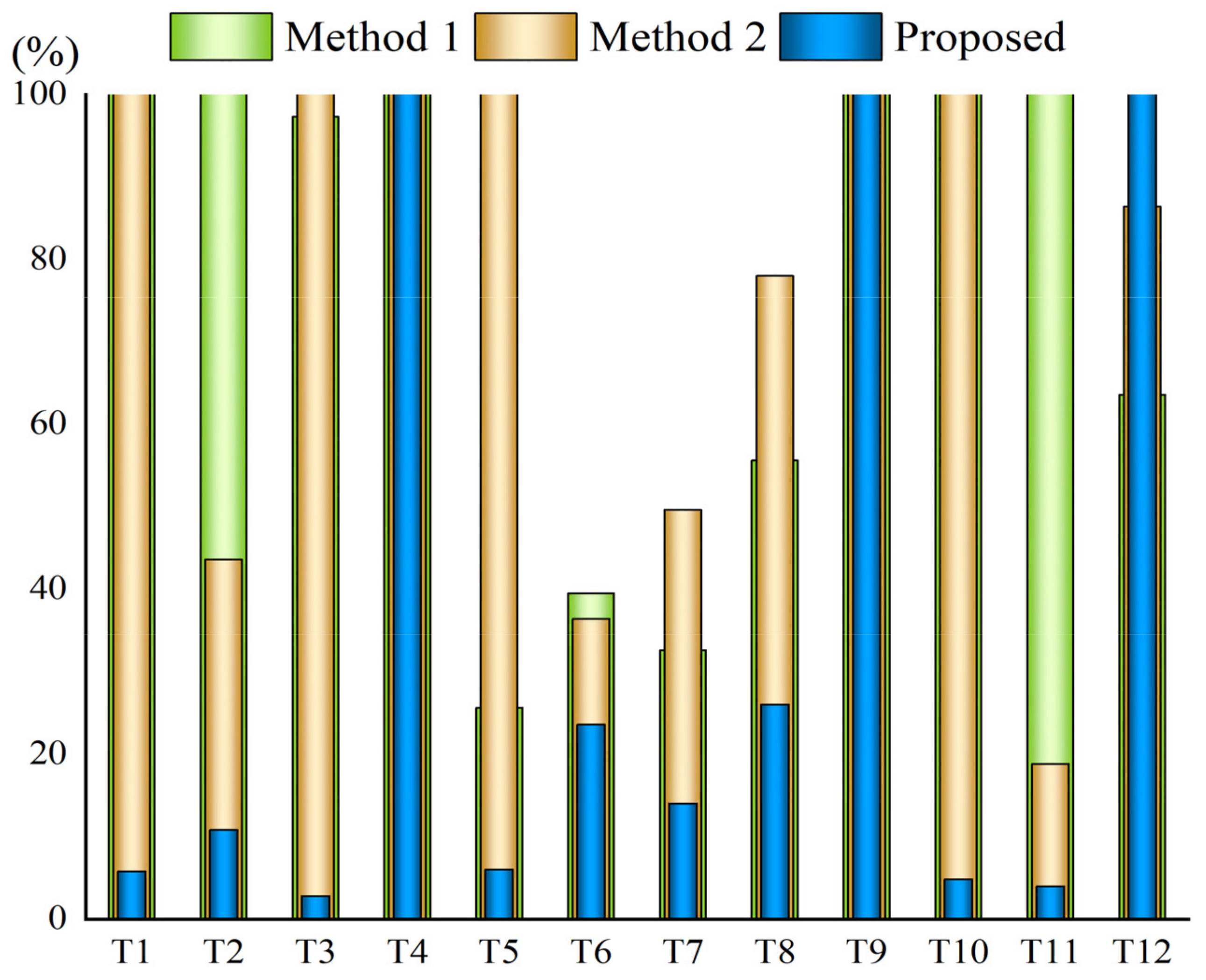
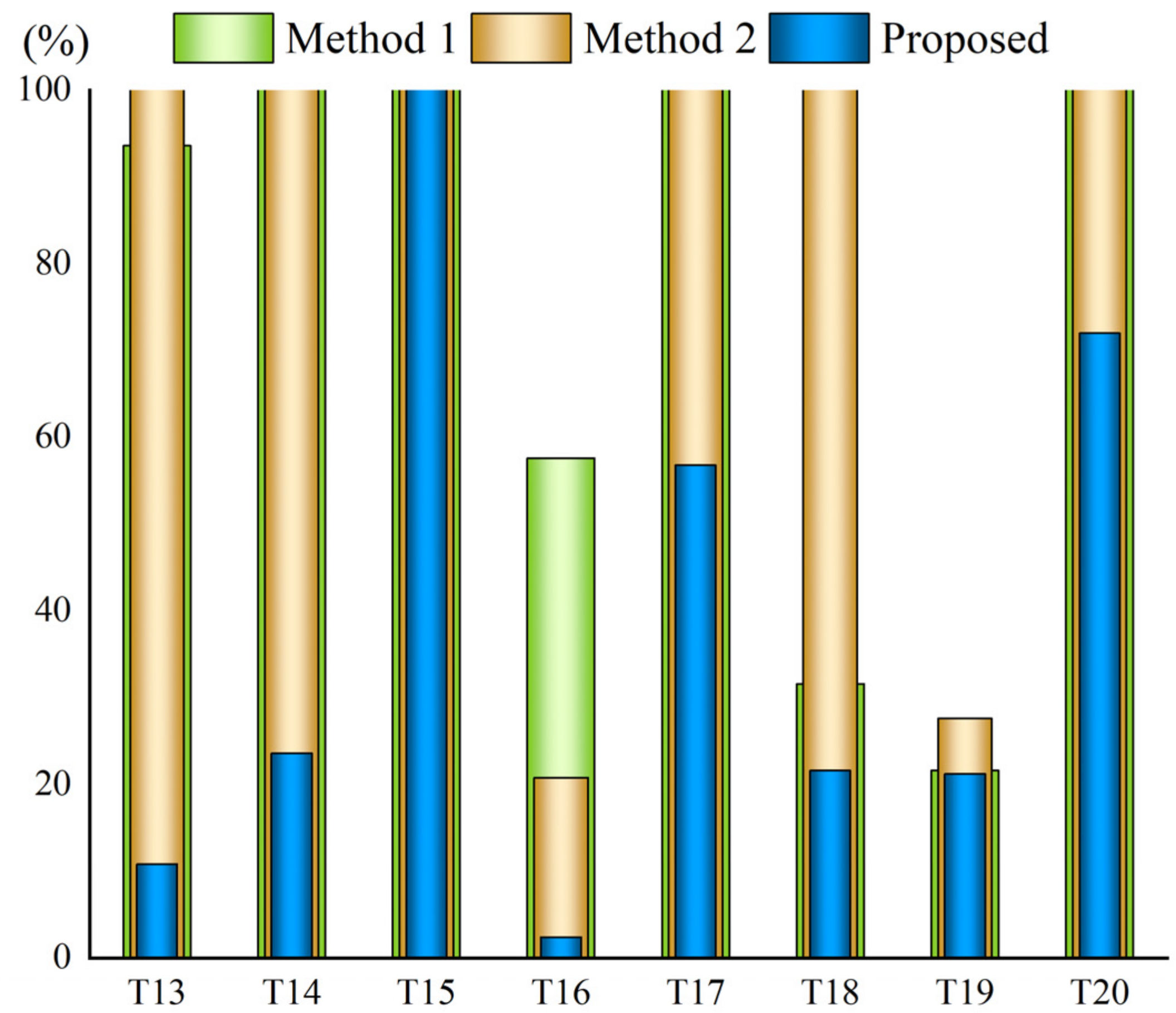
3.2. Experimental Performance Analysis and Discussion
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cruz, H.; Gualotuña, T.; Pinillos, M.; Marcillo, D.; Jácome, S.; Fonseca, C.E.R. Machine Learning and Color Treatment for the Forest Fire and Smoke Detection Systems and Algorithms, A Recent Literature Review BT—Artificial Intelligence, Computer and Software Engineering Advances; Botto-Tobar, M., Cruz, H., Díaz Cadena, A., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 109–120. [Google Scholar]
- Geetha, S.; Abhishek, C.S.; Akshayanat, C.S. Machine Vision Based Fire Detection Techniques: A Survey. FIRE Technol. 2021, 57, 591–623. [Google Scholar] [CrossRef]
- Mahmoud, M.; Ren, H. Forest fire detection and identification using image processing and SVM. J. Inf. Process. Syst. 2019, 15, 159–168. [Google Scholar]
- Zhao, Y.; Zhou, Z.; Xu, M. Forest Fire Smoke Video Detection Using Spatiotemporal and Dynamic Texture Features. JECE 2015, 2015, 40. [Google Scholar] [CrossRef]
- Wu, Y.L.; Chen, M.H.; Wo, Y.; Han, G.Q. Video smoke detection base on dense optical flow and convolutional neural network. Multimed. Tools Appl. 2021, 80, 35887–35901. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, H.; Fan, X. Algorithm for detection of fire smoke in a video based on wavelet energy slope fitting. J. Inf. Process. Syst. 2020, 16, 557–571. [Google Scholar]
- Vijayalakshmi, S.R.; Muruganand, S. Smoke detection in video images using background subtraction method for early fire alarm system. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017; pp. 167–171. [Google Scholar]
- Tang, T.; Dai, L.; Yin, Z. Smoke image recognition based on local binary pattern. In Proceedings of the 2017 5th International Conference on Mechatronics, Materials, Chemistry and Computer Engineering (ICMMCCE 2017), Chongqing, China, 24–25 July 2017; pp. 1118–1123. [Google Scholar]
- Qin, L.; Wu, X.; Cao, Y.; Lu, X. An effective method for forest fire smoke detection. J. Phys. Conf. Ser. 2019, 1187, 52045. [Google Scholar] [CrossRef]
- Wu, X.; Cao, Y.; Lu, X.; Leung, H. Patchwise dictionary learning for video forest fire smoke detection in wavelet domain. Neural Comput. Appl. 2021, 33, 7965–7977. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, X.; Liu, Y.; Qian, Z. Smoke-detection framework for high-definition video using fused spatial-and frequency-domain features. IEEE Access 2019, 7, 89687–89701. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Fan, X. Rapid early fire smoke detection system using slope fitting in video image histogram. Fire Technol. 2020, 56, 695–714. [Google Scholar] [CrossRef]
- Jia, Y.; Chen, W.; Yang, M.; Wang, L.; Liu, D.; Zhang, Q. Video smoke detection with domain knowledge and transfer learning from deep convolutional neural networks. Optik 2021, 240, 166947. [Google Scholar] [CrossRef]
- Zheng, X.; Chen, F.; Lou, L.; Cheng, P.; Huang, Y. Real-Time Detection of Full-Scale Forest Fire Smoke Based on Deep Convolution Neural Network. Remote Sens. 2022, 14, 536. [Google Scholar] [CrossRef]
- Lin, G.; Zhang, Y.; Xu, G.; Zhang, Q. Smoke detection on video sequences using 3D convolutional neural networks. Fire Technol. 2019, 55, 1827–1847. [Google Scholar] [CrossRef]
- Ren, W.; Zhang, J.; Xu, X.; Ma, L.; Cao, X.; Meng, G.; Liu, W. Deep Video Dehazing With Semantic Segmentation. IEEE Trans. Image Process. 2019, 28, 1895–1908. [Google Scholar] [CrossRef] [PubMed]
- Ren, W.; Pan, J.; Zhang, H.; Cao, X.; Yang, M.-H. Single Image Dehazing via Multi-Scale Convolutional Neural Networks with Holistic Edges. Int. J. Comput. Vis. 2020, 128, 240–259. [Google Scholar] [CrossRef]
- Gao, Y.; Cheng, P. Forest fire smoke detection based on visual smoke root and diffusion model. Fire Technol. 2019, 55, 1801–1826. [Google Scholar] [CrossRef]
- Gao, Y.; Cheng, P. Full-scale video-based detection of smoke from forest fires combining ViBe and MSER algorithms. Fire Technol. 2021, 57, 1637–1666. [Google Scholar] [CrossRef]
- Lou, L.; Chen, F.; Cheng, P.; Huang, Y. Smoke root detection from video sequences based on multi-feature fusion. J. For. Res. 2022, 1–16. [Google Scholar] [CrossRef]
- Kim, K.; Chalidabhongse, T.H.; Harwood, D.; Davis, L. Real-time foreground-background segmentation using codebook model. Real-Time Imaging 2005, 11, 172–185. [Google Scholar] [CrossRef]
- Wang, H.; Suter, D. A consensus-based method for tracking: Modelling background scenario and foreground appearance. Pattern Recognit. 2007, 40, 1091–1105. [Google Scholar] [CrossRef]
- Barnich, O.; Van Droogenbroeck, M. ViBe: A universal background subtraction algorithm for video sequences. IEEE Trans. Image Process. 2010, 20, 1709–1724. [Google Scholar] [CrossRef] [PubMed]
- Zivkovic, Z.; Van Der Heijden, F. Efficient adaptive density estimation per image pixel for the task of background subtraction. Pattern Recognit. Lett. 2006, 27, 773–780. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341. [Google Scholar] [PubMed]
- Zhang, T.Y.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, W.; Liu, Y.; Wang, X.; Zhou, Y. A smoke segmentation algorithm based on improved intelligent seeded region growing. Fire Mater. 2019, 43, 725–733. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | ROI Size | Description |
|---|---|---|
| T1 | 12 × 12 | Close-up of the smoke on the land with a grey background |
| T2 | 14 × 14 | Smoke on the hillside with white buildings |
| T3 | 14 × 14 | Smoke in a vegetable field with trees and houses of a similar color to the smoke |
| T4 | 14 × 14 | Smoke on grass with large area disturbances, such as sticks |
| T5 | 14 × 14 | Smoke in open space with distractors such as grass, trees, and dwellings |
| T6 | 14 × 14 | Smoke rising over land in the evening, surrounded by trees and houses |
| T7 | 30 × 10 | Smoke in a residential area, where most houses are similar in color to the smoke, and the video is blocked by a pillar |
| T8 | 10 × 10 | wind, leaves, and people moving |
| T9 | 14 × 14 | Smoke lit up on red ground with wind and moving people |
| T10 | 14 × 14 | There are houses, roads, and moving cars |
| T11 | 14 × 14 | Smoke from a factory building, and the whole picture is gray |
| T12 | 14 × 14 | Smoke rising in a wooded area, with a few houses nearby |
| T13 | 10 × 10 | Smoke from the side of the road, with moving cars |
| T14 | 10 × 10 | Roads, cars, and mobile homes |
| T15 | 10 × 10 | Thick fog, obscured iron railings |
| T16 | 10 × 10 | Smoke on distant hillsides |
| T17 | 10 × 10 | Smoke on the chimney, mostly slow-moving clouds |
| T18 | 10 × 10 | Smoke rising from forest |
| T19 | 10 × 10 | Position of the smoke at the foot of a mountain in the evening |
| T20 | 10 × 10 | Smoke rising from flat ground in the distance |
| Video | Distance | Total Frames | Method 1 | Method 2 | Proposed |
|---|---|---|---|---|---|
| T1 | Short distance | 225 | No | No | 13th |
| T2 | Short distance | 250 | No | 109th | 27th |
| T3 | Short distance | 225 | 219th | No | 6th |
| T4 | Short distance | 250 | No | No | No |
| T5 | Short distance | 250 | 64th | No | 15th |
| T6 | Short distance | 225 | 89th | 82nd | 53rd |
| T7 | Short distance | 250 | 84th | 124th | 35th |
| T8 | Short distance | 250 | 139th | 195th | 65th |
| T9 | Short distance | 250 | No | No | No |
| T10 | Short distance | 250 | No | No | 12th |
| T11 | Short distance | 250 | No | 47th | 10th |
| T12 | Short distance | 250 | 159th | 216th | No |
| T13 | Long distance | 250 | 234th | No | 27th |
| T14 | Long distance | 250 | No | No | 59th |
| T15 | Long distance | 250 | No | No | No |
| T16 | Long distance | 250 | 144th | 52nd | 6th |
| T17 | Long distance | 250 | No | No | 142nd |
| T18 | Long distance | 250 | 79th | No | 54th |
| T19 | Long distance | 250 | 54th | 69th | 53rd |
| T20 | Long distance | 250 | No | No | 180th |
| Short-Distance Accuracy | Long-Distance Accuracy | Total Accuracy | |
|---|---|---|---|
| Method1 | 50% | 50% | 50% |
| Method2 | 50% | 25% | 40% |
| Proposed | 75% | 87.5% | 80% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Cheng, P.; Chen, F.; Huang, Y. Full-Scale Fire Smoke Root Detection Based on Connected Particles. Sensors 2022, 22, 6748. https://doi.org/10.3390/s22186748
Feng X, Cheng P, Chen F, Huang Y. Full-Scale Fire Smoke Root Detection Based on Connected Particles. Sensors. 2022; 22(18):6748. https://doi.org/10.3390/s22186748
Chicago/Turabian StyleFeng, Xuhong, Pengle Cheng, Feng Chen, and Ying Huang. 2022. "Full-Scale Fire Smoke Root Detection Based on Connected Particles" Sensors 22, no. 18: 6748. https://doi.org/10.3390/s22186748