1. Introduction
Prognostics and health management (PHM) is essential for modern industry [
1,
2]. However, the rotating machinery in the modern industry generally operates in a harsh working environment, and the mechanical transmission system would inevitably produce various types of failures, which may easily lead to accidents or economic losses [
3,
4,
5]. Bearings are one of the important components in the transmission system, and their health has a direct impact on the performance and stability of mechanical equipment. Therefore, more accurate and smarter bearing health monitoring technology is extremely desirable for the stable working condition of rotating machinery [
6,
7,
8].
As one of the advanced algorithms, deep learning has played an important role in computer vision, natural language processing, speech recognition, and other fields [
9]. Recently, deep learning methods have also been widely used in the field of PHM [
10]. Tang [
11] discussed the existing fault diagnosis methods for rotating machinery. He also analyzed the future investigation direction of this field. Khemani [
12] optimized the second-generation wavelet transform operators using a genetic algorithm, and established a fault diagnosis method for wavelet-scattering networks based on the optimization results. Wang [
13] developed an approach based on the conditional variational auto-encoder generative adversarial network (CVAE-GAN) for the imbalanced data in the fault diagnosis of the planetary gearbox. Zhou [
14] proposed a global optimization GAN, and the training process of this method is guided by fault feature and fault diagnosis error, so it has higher diagnostic accuracy than traditional generative models. Zhu [
15] proposed an intelligent fault diagnosis method by combining principal component analysis (PCA) and deep belief network (DBN). The results indicate that this method can effectively achieve fault diagnosis of rolling bearing. He [
16] developed a method for the weak fault diagnosis of bearing. This method uses fractional Fourier transform (FRFT) to transform the original signal into the fractional domain and performs filtering, and then uses deep belief networks (DBN) to adaptively extract the bearing fault features.
In addition to the above models, convolutional neural network (CNN) has been extensively studied for fault diagnosis. This method utilizes operations such as local receptive fields and weight sharing to extract fault features more quickly and accurately. With the continuous development of CNN, some excellent architectures have emerged, such as VGG, ResNet, Inception, etc. These algorithms have broad applications in fault diagnosis. Dibaj [
17] proposed a fault diagnosis method that combines fine-tuned variational mode decomposition (VMD) and CNN to realize bearing compound fault diagnosis. A single fault sample was adopted to train the model during this process. Wen [
18] put forward a fault diagnosis method for hierarchical convolutional neural network (HCNN), which trained two classifiers simultaneously for diagnosing fault patterns and fault severity. Huang [
19] introduced a one-dimensional deep convolutional neural network (DCNN) in compound fault diagnosis. Zhang [
20] provided a slope and threshold adaptive activation function with the tanh function, and ResNet was introduced to realize the fault diagnosis of rolling bearings. Zhang [
21] used the channel attention mechanism to improve the feature extraction ability of the ResNet model. Chen [
22] utilized the Inception v3 model to build a transfer learning model to realize the fault diagnosis of the wind turbine with imbalanced data. Wang [
23] employed a multi-sensor model based on VGG and swarm decomposition for fault diagnosis, and the experimental results show that this method has good diagnostic accuracy and robustness.
However, it remains a most challenging issue to establish the excellent fault diagnosis model with limited circumstances [
24]. The traditional approach is to continuously increase the depth or width of the model, which places high demands on the computer hardware and increases the difficulty of intelligent fault diagnosis [
25,
26]. Moreover, a great increase in the depth or width of the model limits the performance of the model, so a proper balance of width and depth remains a key issue to be addressed.
As an efficient classification algorithm, EfficientNet provides an amazing way to scale neural network models by enhancing depth, width, and resolution [
27,
28]. It is a CNN and scaling technique that applies compound coefficients to uniformly scale depth, width, and resolution dimensions. This process avoids the limitations of traditional convolutional neural networks on this problem.
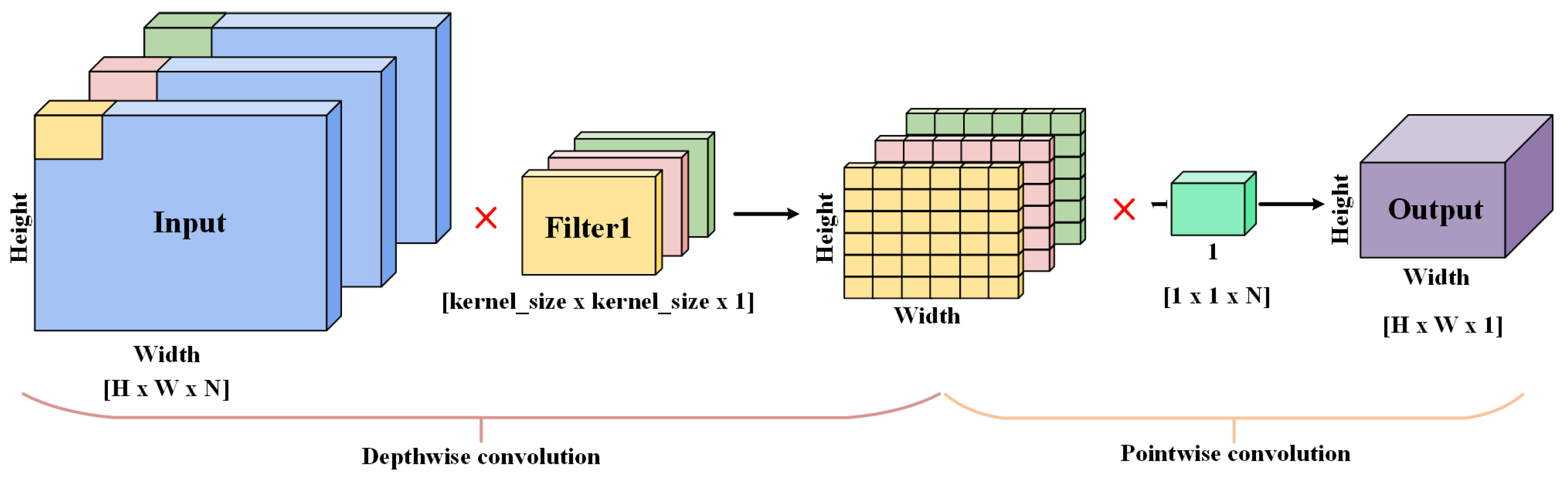
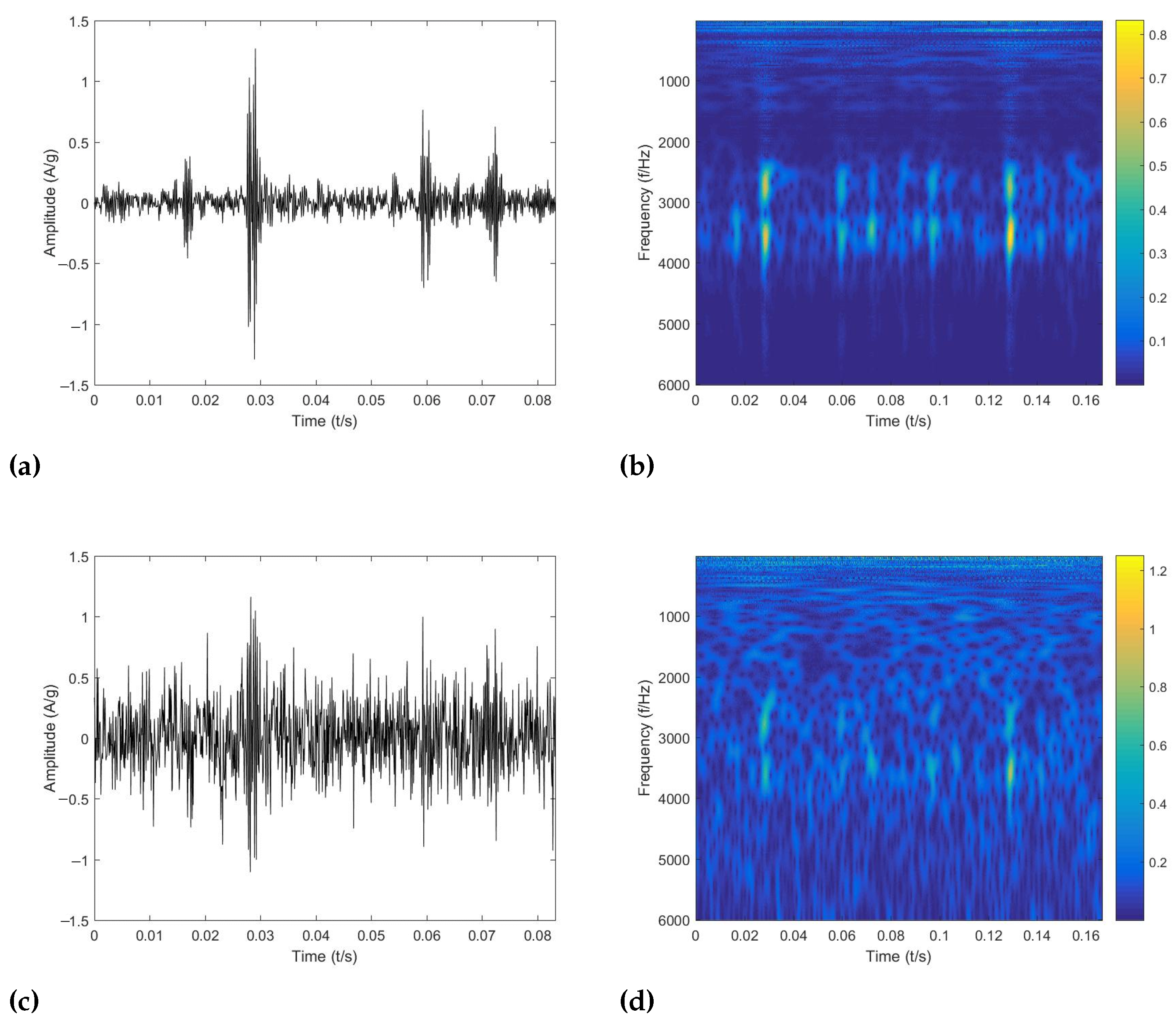
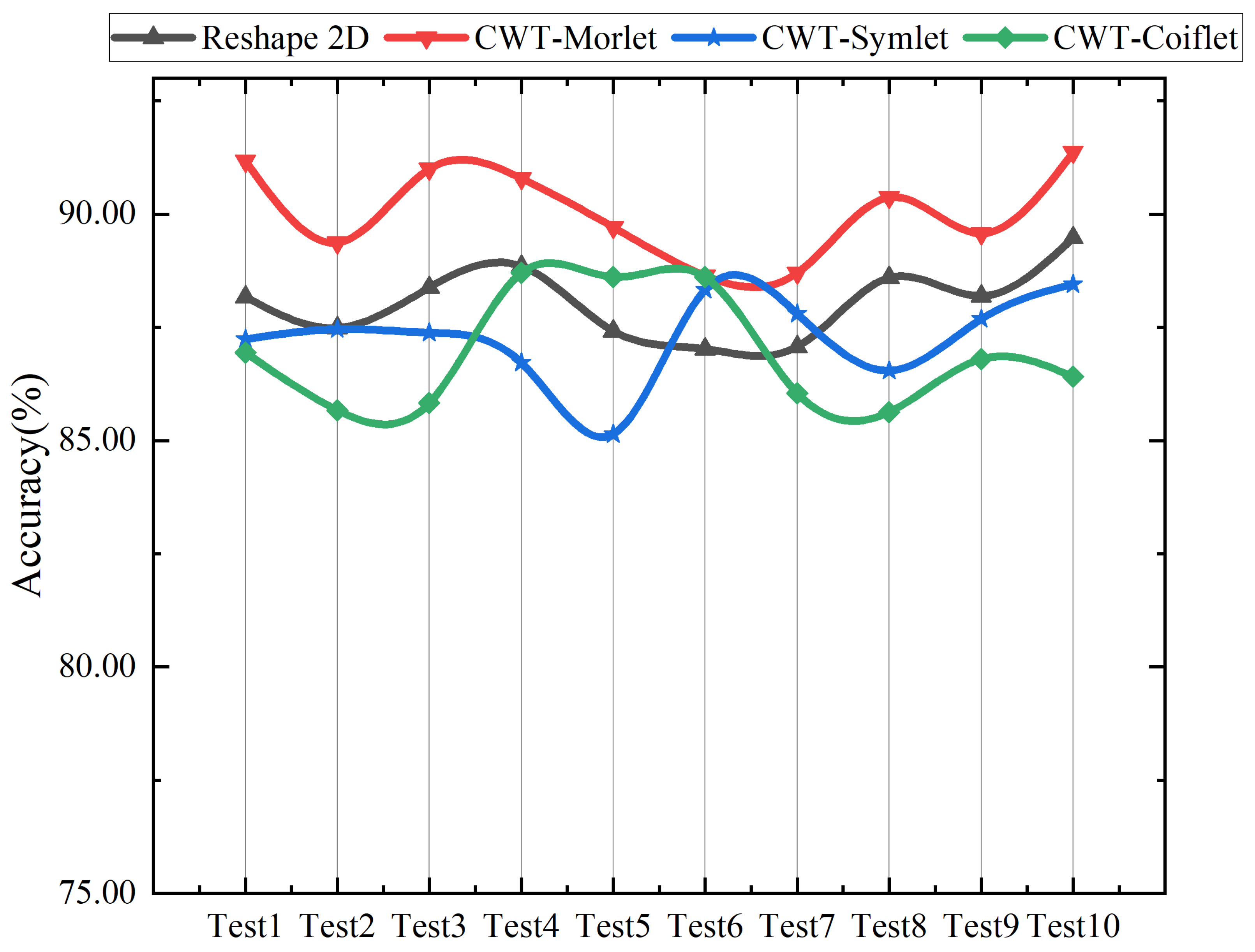
For this purpose, a fault diagnosis model based on EfficientNet is proposed in this paper. Continuous wavelet transforms (CWT) [
29] is employed to process bearing vibration signals to obtain time frequency representations (TFRs), and a new composite scaling method is utilized to balance the depth, width, and resolution of the model, which can improve the diagnostic accuracy in fault diagnosis and maximize resource utilization.
Meanwhile, it is worth noting that noise exists in the actual working environment of mechanical equipment. The collected signals during the acquisition process contain characteristic features of the fault, but this feature information might be submerged in much noise, leading the model to learn inaccurate features [
30,
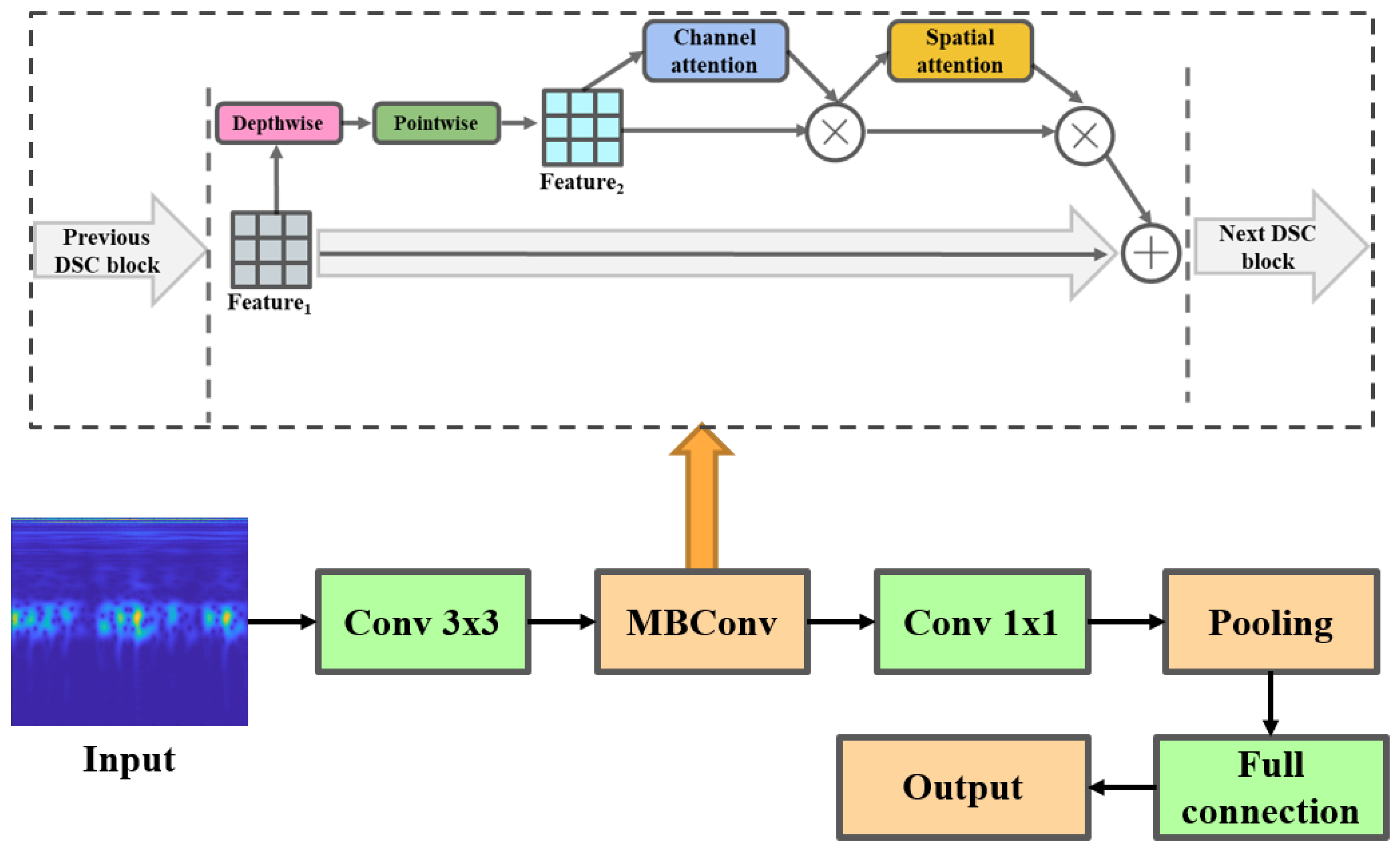
31]. Hence, noise is a key factor affecting the accuracy of diagnostic models. Improving model efficiency under heavy background noise is critical for fault diagnosis. To this end, two attention mechanisms are introduced to capture the feature dependencies in the TFRs of faults. Specifically, the spatial attention mechanism and the channel attention mechanism are added to the model to emphasize the fault features in the TFR [
32]. It can avoid the interference of noise areas. Bearing experiments are carried out to validate the proposed method, and the results indicate that this method outperforms other existing methods. A detailed analysis is also provided for the application of the proposed method in actual working conditions.
In this paper, a fault diagnosis method is proposed by combining time–frequency analysis and a new architecture, EfficientNet. The proposed method in this paper improves the efficiency of fault diagnosis with limited resources and also ensures diagnosis accuracy. In addition, the influence of background noise on the model accuracy is significantly reduced. The main contributions of this paper are summarized as follows.
(1) A fault diagnosis method for rolling bearings based on EfficientNet is proposed. Compared with other methods, this method can obtain the optimal diagnosis efficiency with limited resources.
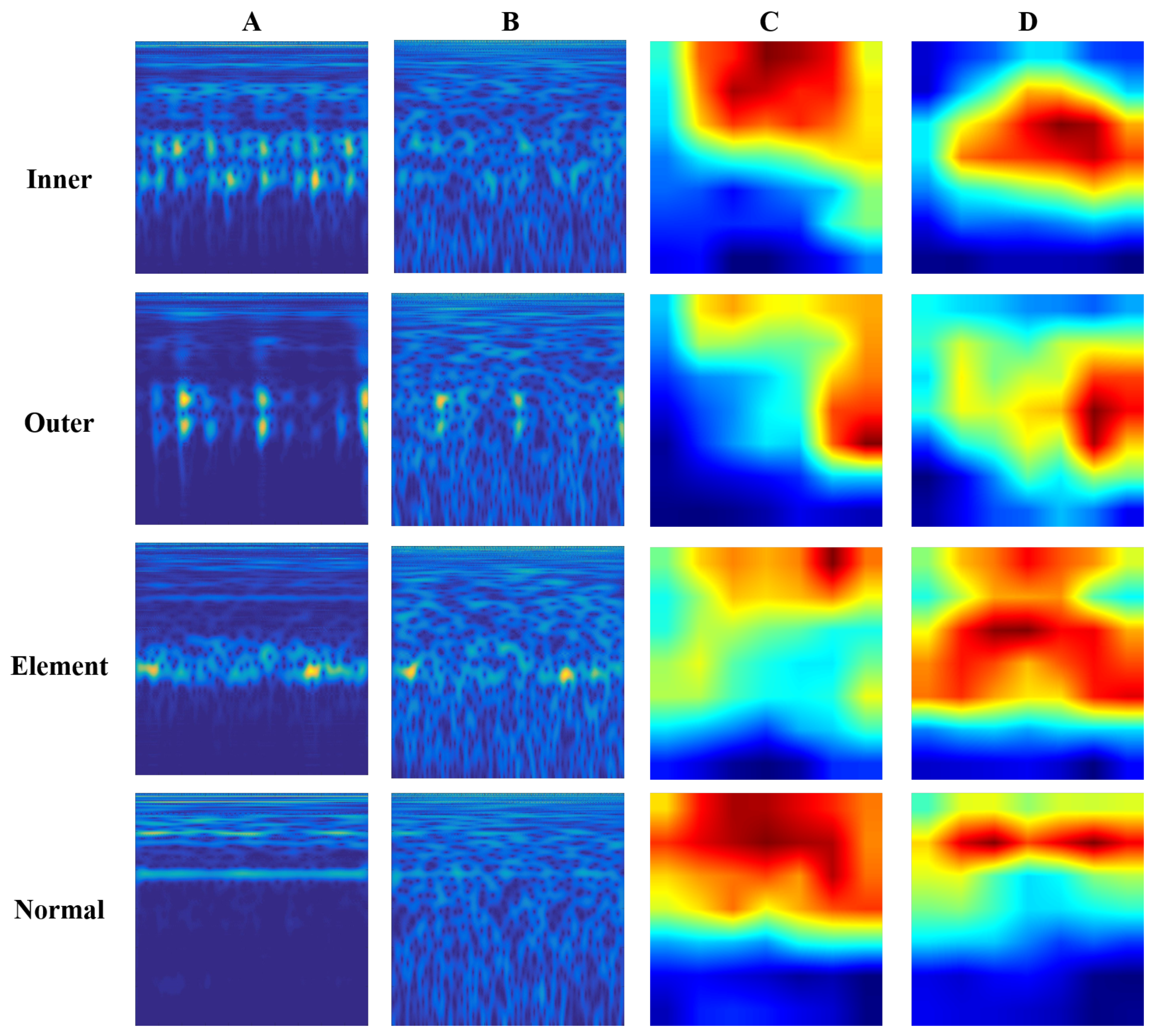
(2) To reduce the influence of noise on diagnostic accuracy, a dual attention mechanism is introduced to refine the local features and effectively capture global features. The role of the attention mechanism is presented through the visualization of the results.
(3) The programmed algorithm is evaluated with noisy samples, and the diagnostic accuracy is 89.54%. In the application of actual working conditions, the model also is superior to other methods, and the diagnostic accuracy is 86.24%.
The rest of the paper is organized as follows:
Section 2 presents the preliminaries of the proposed method for fault diagnosis in this paper.
Section 3 explains the structure of the proposed fault diagnosis model. The experiments and results analysis are presented in
Section 4. Finally, we draw a conclusion in
Section 5.
5. Concluding Remarks
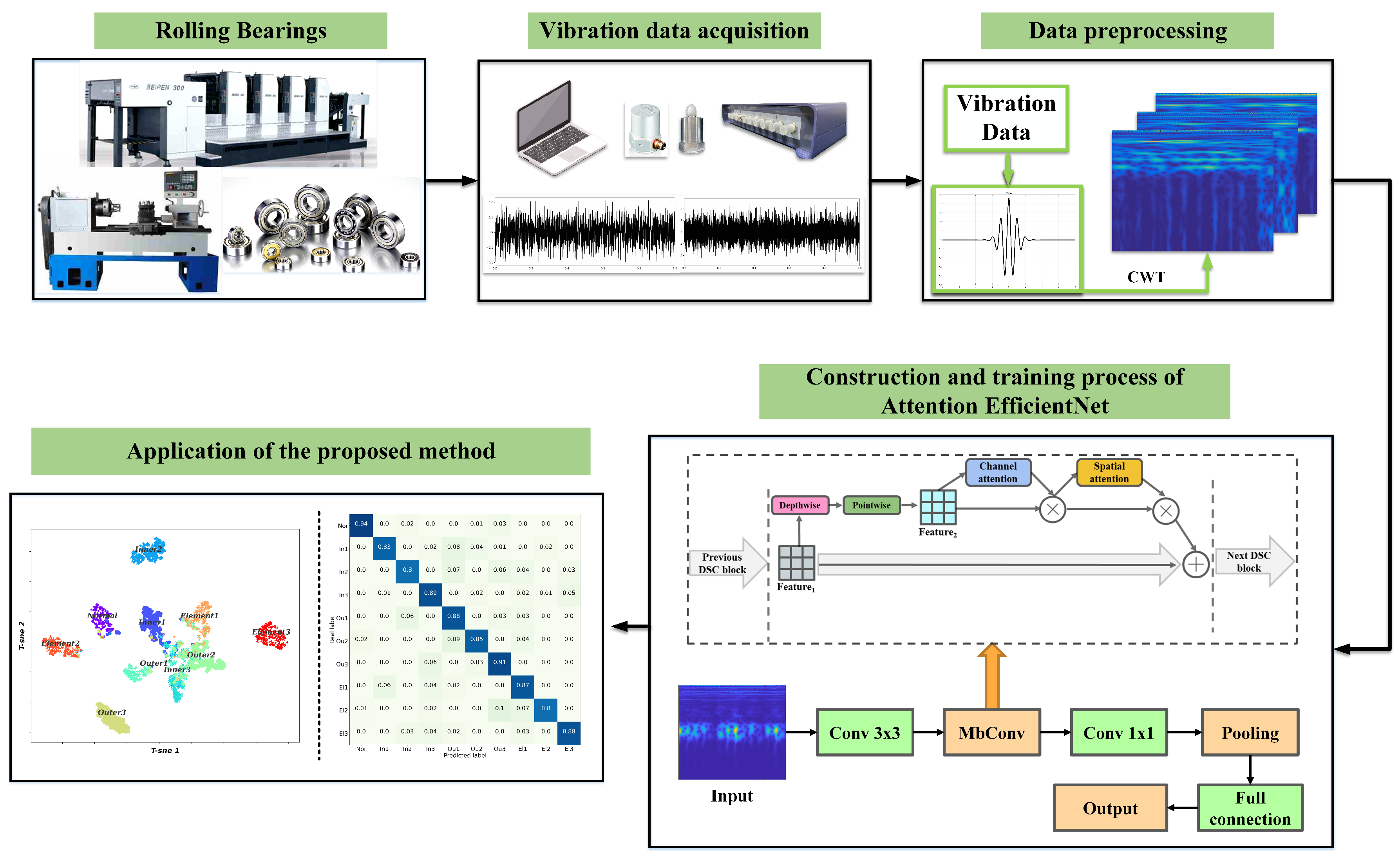
In this paper, a method based on attention EfficientNet is proposed to achieve the fault diagnosis of rolling bearing. The bearing vibration signal is first processed by CWT, and the multi-channel TFR is obtained. Next, these TFRs are then input into the MobileNet-based EfficientNet to extract hidden features for fault identification. In this process, the attention mechanism is introduced to guide the feature extraction process of the model, which enables the model to focus on the representative fault features and improves the diagnostic accuracy under complicated noise.
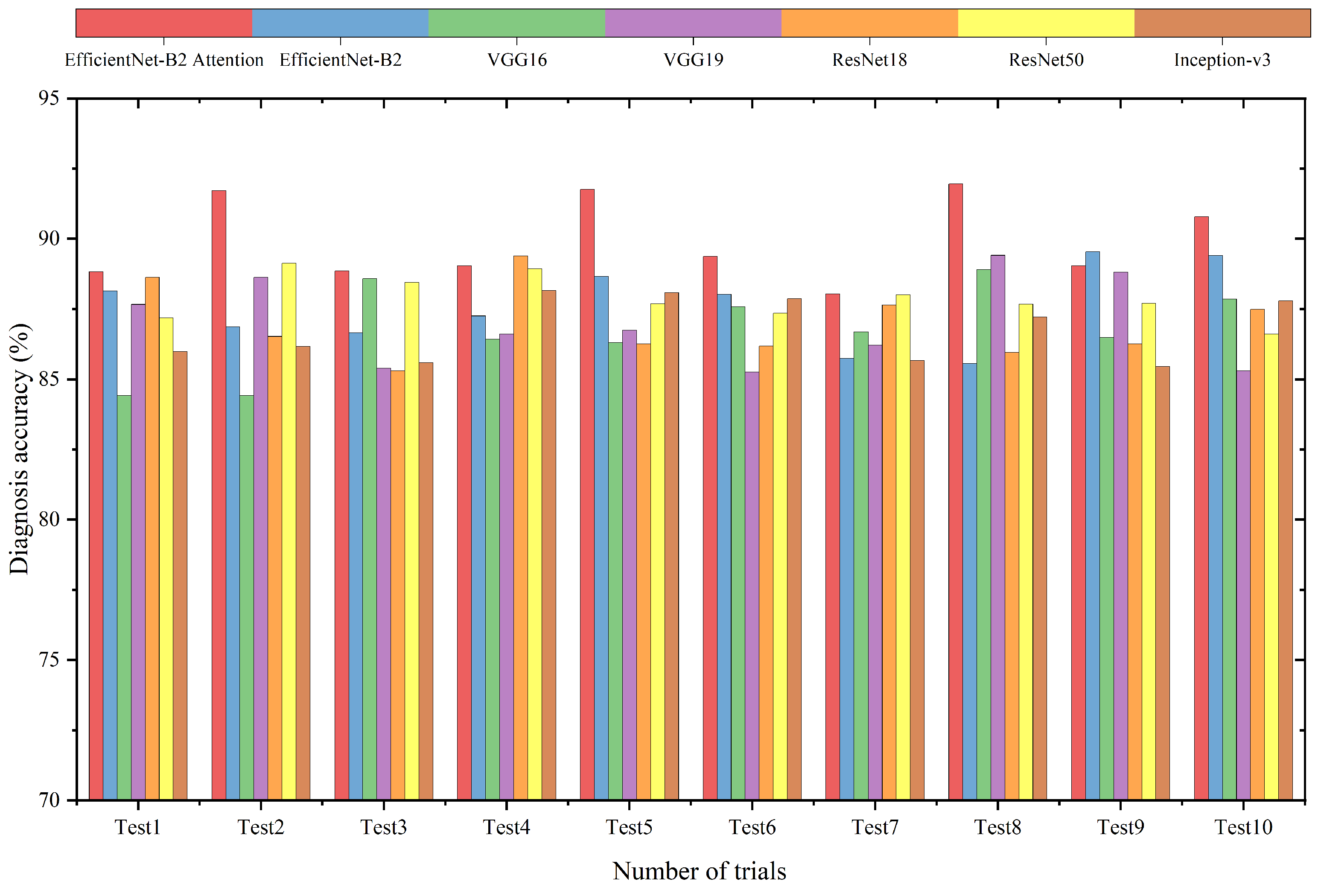
The effectiveness of the proposed method is verified by two experimental cases. Compared with other advanced methods, this diagnostic method has the following advantages: (1) This method can build an optimal model with limited resources, and the introduced attention mechanism improves the ability of the model to focus on fault features. (2) Compared with other methods, the proposed method has better diagnostic accuracy and stability. (3) This method has excellent performance under strong noise, and the average accuracy is 89.54% in the dataset containing simulated noise and 86.24% in the dataset containing real noise.
There is still much room for improvement, and our future work will focus on the following aspects. (1) More efficient signal preprocessing techniques will be explored to further improve the diagnostic accuracy of the model. (2) Different attention mechanisms are introduced to improve the feature extraction capabilities of the model.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}