
An Outlier Cleaning Based Adaptive Recognition Method for Degradation Stage of Bearings

Abstract
:1. Introduction
- (1)
- An outlier detection method is constructed by combining the global search of abnormal signal segments and the accurate locating of local abnormal impulses. Adopting the constructed method, the normal signals misjudged as outliers in abnormal signal segments can be greatly reduced and the normal data can be fully retained.
- (2)
- A screening criteria and an iteration removal strategy are proposed, achieving an adaptive detection of segments that contain abnormal impulses and a quick removal of abnormal segments.
- (3)
- After outlier cleaning, the 3σ approach is used to set the degradation warning threshold adaptively to realize the degradation stage recognition of bearings. The outlier cleaning avoids the interference of the selection of reference signals and improves the accuracy and stability of the degradation stage recognition.
2. The Proposed Method
2.1. Detection Method for Abnormal Signal Segments
2.1.1. Data Preprocessing
2.1.2. Local Outlier Factor
2.1.3. Local Outlier Factor Based on Multi-Scale Kernel Regression
2.1.4. Outliers Determination
2.2. Accurate Locating Method for Abnormal Impulses
2.2.1. Start Point Identification Methods for Impulses
2.2.2. End Point Identification Methods for Impulses
2.3. Removing Method for Outliers
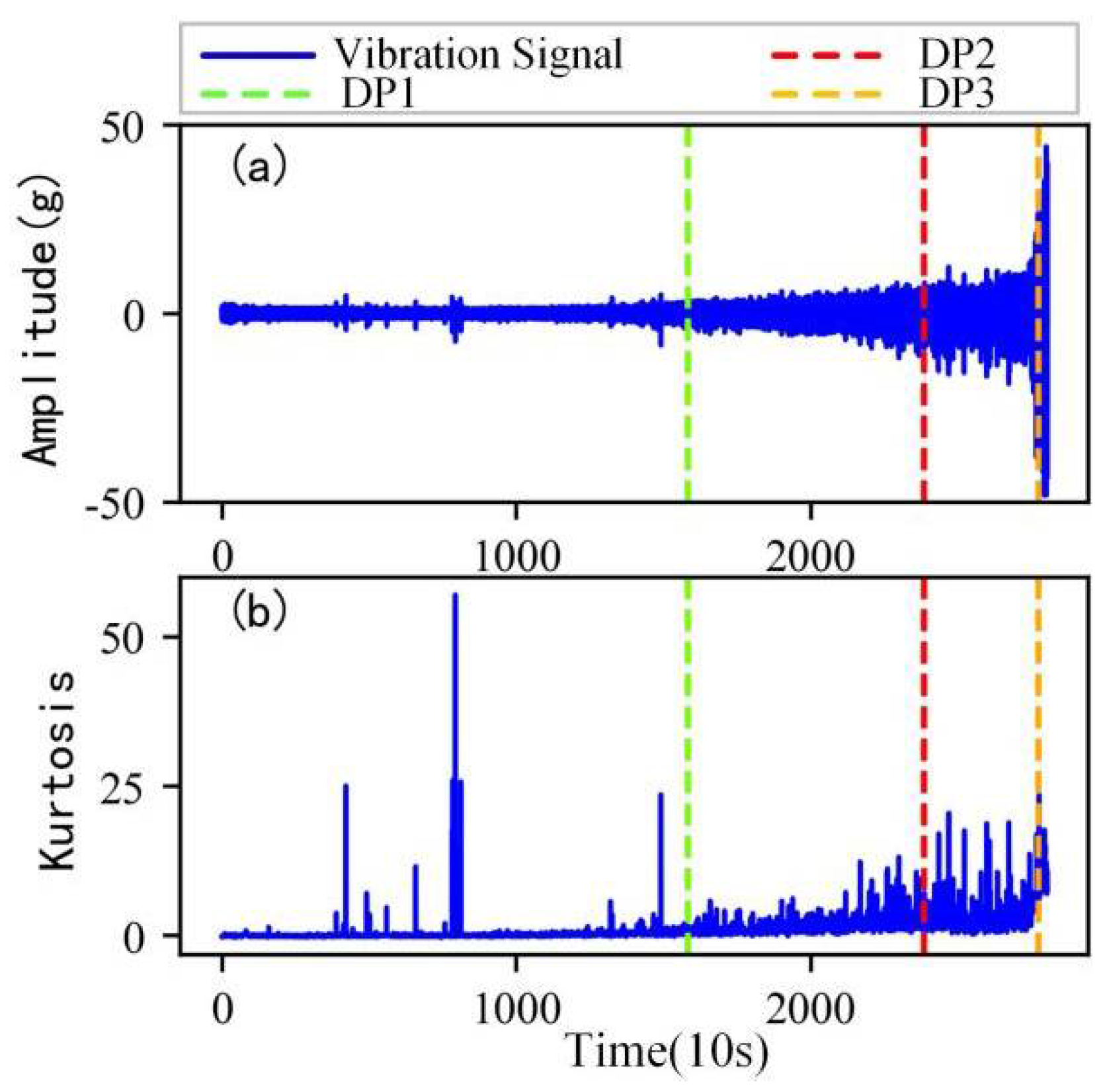
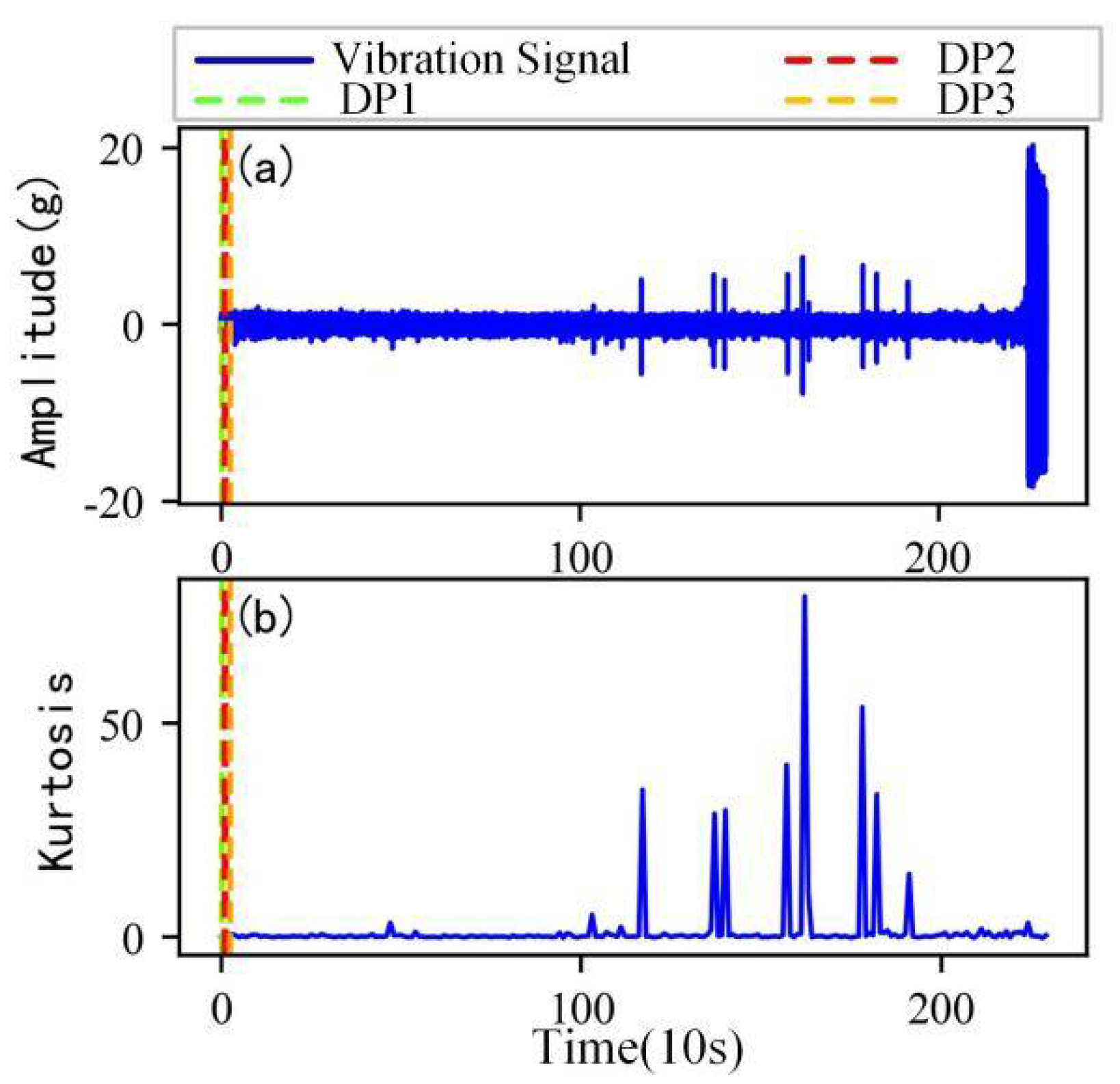
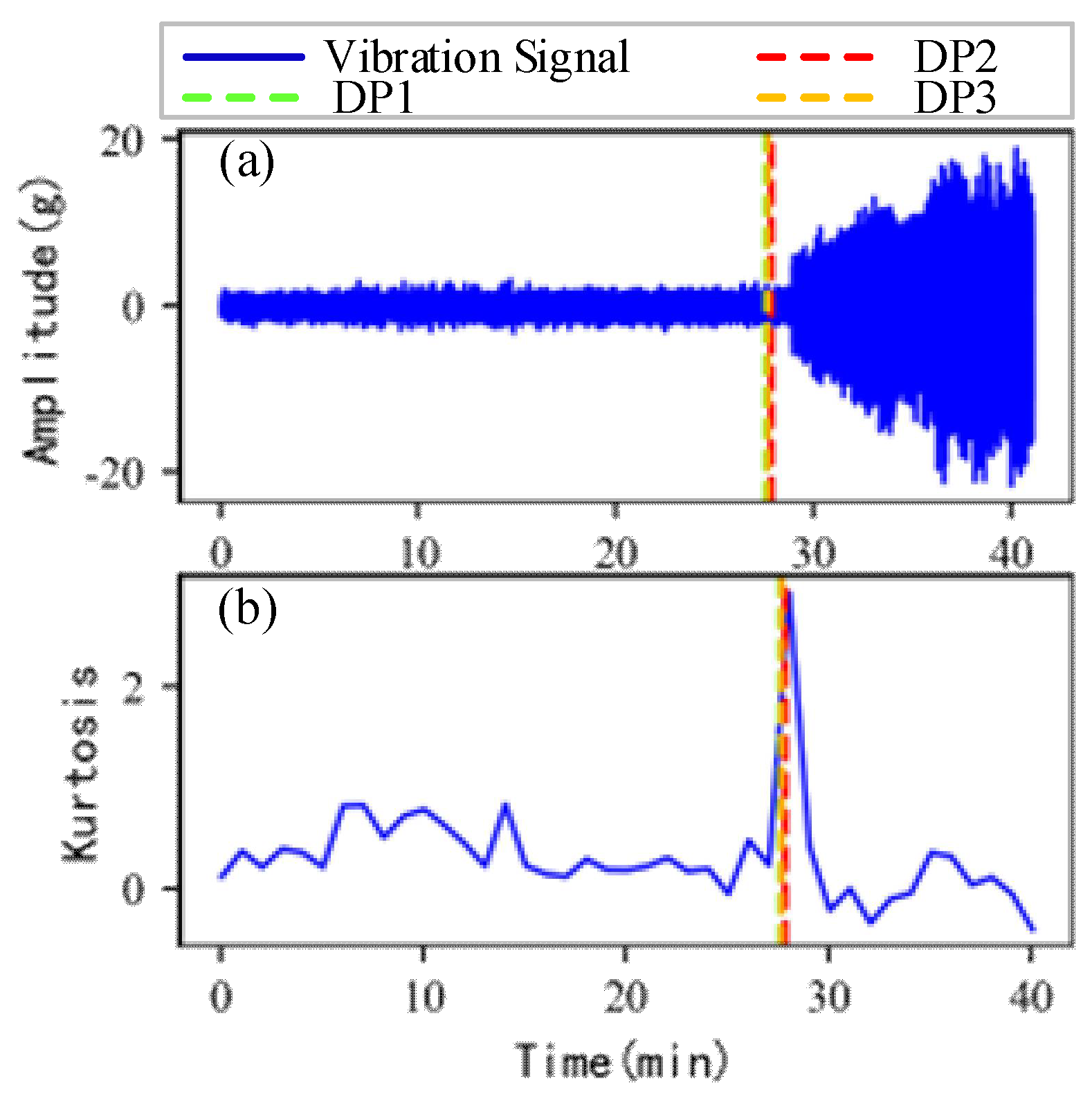
2.4. Degradation Point Detection
3. Experiments and Analysis
3.1. PHM 2012 DataSet
3.2. XJTU-SY DataSet
3.3. Results and Analysis
3.3.1. Outliers Detection
3.3.2. Comparison of Outlier Detection Effects
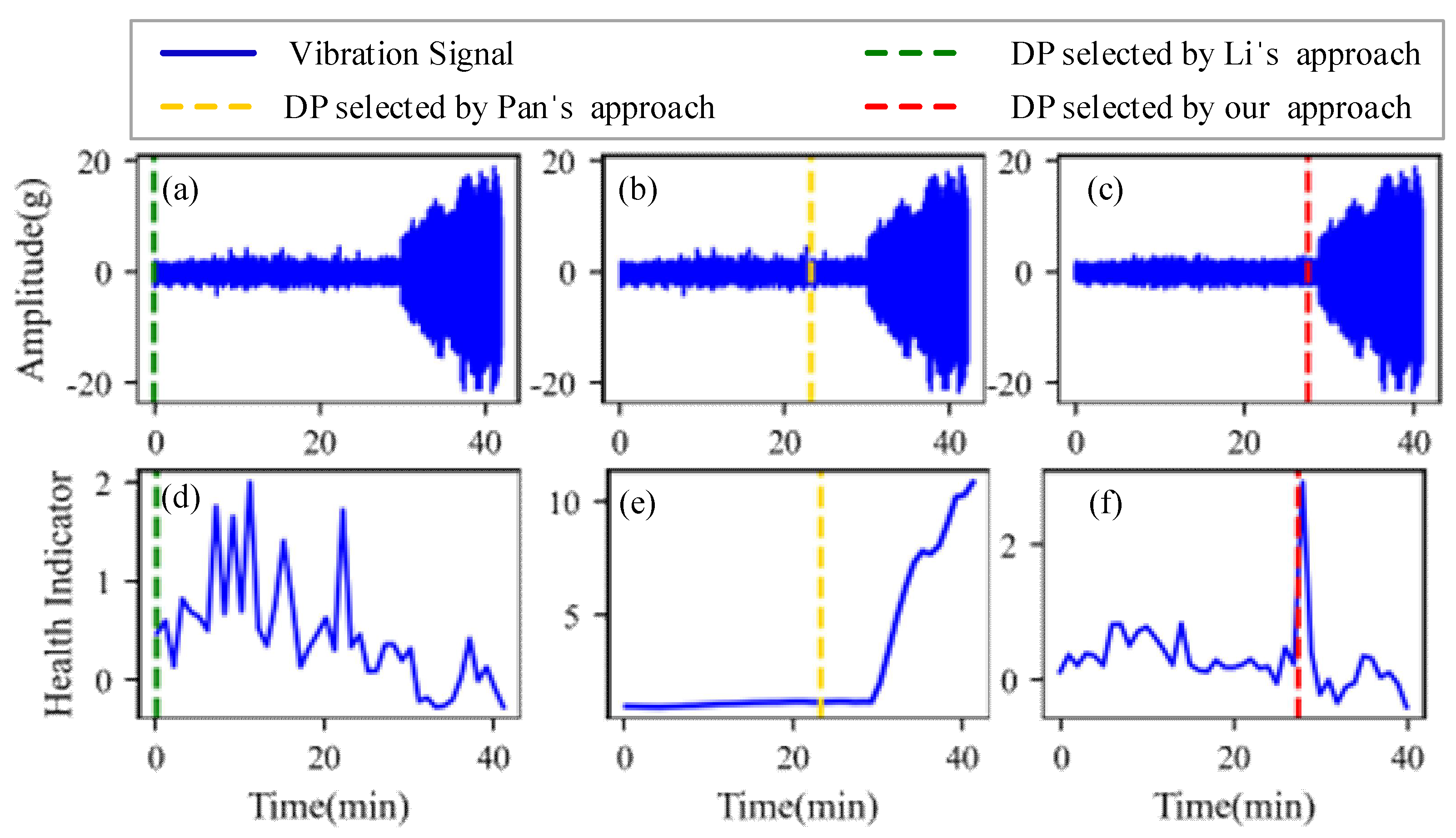
3.3.3. Comparative of Degradation Stage Recognition
- (1)
- Stability comparison of health indicator
- (2)
- Robustness comparison of degraded point identification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, T.; Ma, X.; Yang, L.; Zhao, Y. Proactive maintenance scheduling in consideration of imperfect repairs and production wait time. J. Manuf. Syst. 2019, 53, 183–194. [Google Scholar] [CrossRef]
- Zhou, F.; Yang, S.; Fujita, H.; Chen, D.; Wen, C. Deep learning fault diagnosis method based on global optimization GAN for unbalanced data. Knowl.-Based Syst. 2020, 187, 104837. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.; Yan, T.; Li, N.; Guo, L. Recurrent convolutional neural network: A new framework for remaining useful life prediction of machinery. Neurocomputing 2020, 379, 117–129. [Google Scholar] [CrossRef]
- Jin, X.; Zhao, M.; Chow, T.W.; Pecht, M. Motor Bearing Fault Diagnosis Using Trace Ratio Linear Discriminant Analysis. IEEE Trans. Ind. Electron. 2013, 61, 2441–2451. [Google Scholar] [CrossRef]
- Che, Y.; Chen, Y.; Cui, Y. Rolling element bearing remaining useful life estimation based on KPCA and improved long-short-term memory network. J. Electron. Meas. Instrum. 2021, 35, 109–114. [Google Scholar]
- Miao, M.; Yu, J. A Deep Domain Adaptative Network for Remaining Useful Life Prediction of Machines Under Different Working Conditions and Fault Modes. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Li, N.; Lei, Y.; Lin, J.; Ding, S.X. An Improved Exponential Model for Predicting Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Ind. Electron. 2015, 62, 7762–7773. [Google Scholar] [CrossRef]
- Kong, X.; Yang, J. Remaining useful life prediction of rolling bearings based on RMS-MAVE and dynamic exponential regression model. IEEE Access 2019, 7, 169705–169714. [Google Scholar] [CrossRef]
- Singh, J.; Darpe, A.K.; Singh, S.P. Bearing remaining useful life estimation using an adaptive data-driven model based on health state change point identification and K-means clustering. Meas. Sci. Technol. 2020, 31, 085601. [Google Scholar] [CrossRef]
- Pan, Z.; Meng, Z.; Chen, Z.; Gao, W.; Shi, Y. A two-stage method based on extreme learning machine for predicting the remaining useful life of rolling-element bearings. Mech. Syst. Signal Process. 2020, 144, 106899. [Google Scholar]
- Gao, H.; Cui, L.; Dong, Q. Reliability modeling for a two-phase degradation system with a change point based on a Wiener process. Reliab. Eng. Syst. Saf. 2020, 193, 106601. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ma, H.; Luo, Z.; Li, X. Data alignments in machinery remaining useful life prediction using deep adversarial neural networks. Knowl.-Based Syst. 2020, 197, 105843. [Google Scholar] [CrossRef]
- Baptista, M.L.; Henriques, E.M.P.; Goebel, K. More effective prognostics with elbow point detection and deep learning. Mech. Syst. Signal Process. 2020, 146, 106987. [Google Scholar] [CrossRef]
- Wu, J.-Y.; Wu, M.; Chen, Z.; Li, X.; Yan, R. A joint classification-regression method for multi-stage remaining useful life prediction. J. Manuf. Syst. 2021, 58, 109–119. [Google Scholar] [CrossRef]
- Kong, X.; Yang, J.; Li, L. Remaining useful life prediction for degrading systems with random shocks considering measurement uncertainty. J. Manuf. Syst. 2021, 61, 782–798. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, H.; Hu, M.; Jiang, A.; Zhang, L.; Xu, F.; Hao, G. An Adaptive CEEMDAN Thresholding Denoising Method Optimized by Nonlocal Means Algorithm. IEEE Trans. Instrum. Meas. 2020, 69, 6891–6903. [Google Scholar]
- Chen, W.; Li, J.; Wang, Q.; Han, K. Fault feature extraction and diagnosis of rolling bearings based on wavelet thresholding denoising with CEEMDAN energy entropy and PSO-LSSVM. Measurement 2020, 172, 108901. [Google Scholar] [CrossRef]
- Yang, D.; Karimi, H.R.; Sun, K. Residual wide-kernel deep convolutional auto-encoder for intelligent rotating machinery fault diagnosis with limited samples. Neural Netw. 2021, 141, 133–144. [Google Scholar] [CrossRef]
- Li, X.; Jiang, H.; Xiong, X.; Shao, H. Rolling bearing health prognosis using a modified health index based hierarchical gated recurrent unit network. Mech. Mach. Theory 2019, 133, 229–249. [Google Scholar] [CrossRef]
- Chen, J.; Chang, Y.; Qu, C.; Zhang, M.; Li, F.; Pan, J. Intelligent Impulse Finder: A boosting multi-kernel learning network using raw data for mechanical fault identification in big data era. ISA Trans. 2020, 107, 402–414. [Google Scholar] [CrossRef]
- Gupta, M.; Gao, J.; Aggarwal, C.C.; Han, J. Outlier Detection for Temporal Data: A Survey. IEEE Trans. Knowl. Data Eng. 2014, 9, 2250–2267. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, A. Remaining Useful Life Prediction of Rolling Bearings Using Electrostatic Monitoring Based on Two-Stage Information Fusion Stochastic Filtering. Math. Probl. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Gao, J.; Hu, W.; Li, W.; Zhang, Z.; Wu, O. Local Outlier Detection Based on Kernel Regression. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; Volume 148, pp. 585–588. [Google Scholar]
- Wang, X.; Li, H.; Fan, X.; Liu, S. Probabilistic interval prediction of wind power based on VMD-GRU and nonparametric kernel density estimation. J. Beijing Inf. Sci. Technol. Univ. 2021, 36, 59–65. [Google Scholar]
- Gąsior, K.; Urbańska, H.; Grzesiek, A.; Zimroz, R.; Wyłomańska, A. Identification, decomposition and segmentation of impulsive vibration signals with deterministic components—A sieving screen case study. Sensors 2020, 20, 5648. [Google Scholar] [CrossRef]
- Shakya, P.; Kulkarni, M.S.; Darpe, A.K. A novel methodology for online detection of bearing health status for naturally progressing defect. J. Sound Vib. 2014, 333, 5614–5629. [Google Scholar] [CrossRef]
- Hayter. Probability and Statistics for Engineers and Scientists; Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Chebel-Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In Proceedings of the IEEE International Conference on Prognostics and Health Management, Beijing, China, 23–25 May 2012; pp. 1–8. [Google Scholar]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2020, 69, 401–412. [Google Scholar] [CrossRef]
- Hu, W.; Gao, J.; Li, B.; Wu, O.; Du, J.; Maybank, S.J. Anomaly Detection Using Local Kernel Density Estimation and Context-Based Regression. IEEE Trans. Knowl. Data Eng. 2020, 32, 218–233. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Point | ||||
|---|---|---|---|---|
| Raw Vibration Signal | Method Based on LOF | Proposed Method | Savings | |
| Bearing 1 | 7,175,680 | 6,803,081 | 7,118,743 | 315,662 |
| Bearing 2 | 588,800 | 552,524 | 586,576 | 34,052 |
| Bearing 3 | 314,880 | 299,469 | 308,906 | 9437 |
| Bearing 4 | 107,520 | 100,125 | 103,959 | 3834 |
| Case | Li’s Approach | Pan’s Approach | Our Approach |
|---|---|---|---|
| Bearing 1 | 23,810 s | 17,230 s | 12,910 s |
| Bearing 2 | 0 s | 1600 s | 2190 s |
| Bearing 3 | 0 min | 67 min | 73 min |
| Bearing 4 | 0 min | 23 min | 27 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, J.; Xie, Y.; Wang, T.; Xiao, Y. An Outlier Cleaning Based Adaptive Recognition Method for Degradation Stage of Bearings. Sensors 2022, 22, 6480. https://doi.org/10.3390/s22176480
Xie J, Xie Y, Wang T, Xiao Y. An Outlier Cleaning Based Adaptive Recognition Method for Degradation Stage of Bearings. Sensors. 2022; 22(17):6480. https://doi.org/10.3390/s22176480
Chicago/Turabian StyleXie, Jingsong, Yujie Xie, Tiantian Wang, and Yougang Xiao. 2022. "An Outlier Cleaning Based Adaptive Recognition Method for Degradation Stage of Bearings" Sensors 22, no. 17: 6480. https://doi.org/10.3390/s22176480