4.1. Experimental Apparatus and Data Description
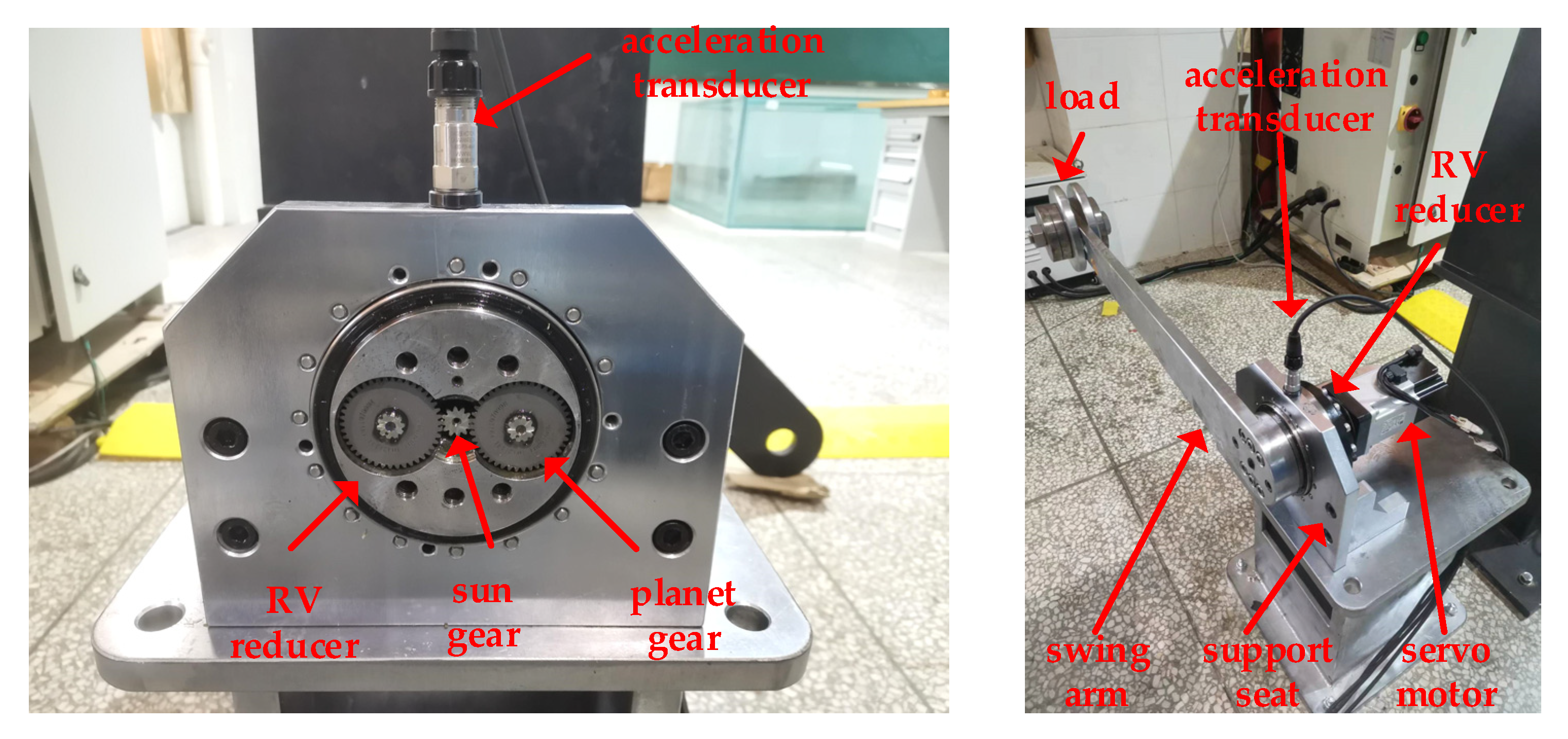
To verify the effectiveness of the method that is proposed in this paper, a test was first carried out on the RV reducer fault simulation experimental bench. The test bench comprises of five parts, a load, swing arm, support seat, servo motor, and RV reducer, as shown in
Figure 8. The servo motor drives the RV reducer to drive the swing arm to perform a reciprocating rotation. In order to be closer to industrial practice, the RV reducer drives the swing arm to do reciprocating motion in the working condition design. The operation angle range is
, and the maximum rotation speed is
. From the initial
to the limit position
, the swing arm goes through three operating states acceleration, steady speed, and deceleration. From the limit 90° to the initial position 0°, the swing arm also goes through three operating states acceleration, steady speed, and deceleration.
The planetary wheel and solar wheel are the two core parts of the RV reducer. Due to long-term operation in heavy loads and time-varying working conditions, the contact area of the two gears is prone to damage [
6]. Therefore, this paper takes the wear fault of the planetary wheel and sun wheel as the research object. Single fault processing is carried out on the sun wheel and planetary wheel of the RV reducer by using WEDM technology. The processing sizes are 0.5 mm, 0.3 mm, and 0.1 mm, which are used to simulate faults with different wear degrees. The fault pictures are shown in
Figure 9.
This RV reducer has four states: normal, multitooth wear of the sun gear, multitooth wear of planetary gear, and compound fault (multitooth wear of the planetary gear and multitooth wear of the sun gear). The acquisition card is a 9234 acquisition card, the sensor is an ICP acceleration sensor, the sensor number is IMI_603C01, the sensitivity is 100 mV/g, and the acceleration sensor is calibrated using the US PCB handheld acceleration sensor calibrator 394C06 before data acquisition. The sampling time is 26 s and the sampling frequency is 6400 Hz. The time domain diagram of the vibration signal of the RV reducer under four working conditions is shown in
Figure 10.
The RV reducer drives the swing arm to make a reciprocating motion. A reciprocating motion takes 2.7 S. At the sampling frequency of 6400 Hz, the RV reducer contains 17,280 data points in one operation cycle. To ensure the speed and recognition efficiency of the network, the number of data points for a set of training data should be and contain at least one run cycle, so the data length for each set of training data should be set to 32,768.
After the training data length is determined, the data enhancement of the 1D vibration signal of the RV reducer is performed using the overlap slicing method. Data enhancement can increase the training data and improve the model’s generalization ability. In data enhancement, the equal data length window is used to divide the data of one-dimensional vibration signal, and more data samples are obtained by moving the window. The window moves one step s forward to get a data sample
until sufficient data samples are obtained. In this experiment, the data length of the window is 32,768, and the step size is 64. The detailed visualization of the overlapping slice method is shown in
Figure 11:
After obtaining sufficient sample data, the sample data were normalized by z-score. The standardized data were used as the input data for the ECCN network, and the z-score standardization formula was:
In the formula: is the standardized data, is the original data is the original data mean, and σ is the original data variance.
After data preprocessing, TensorFlow generates the training and test sets of the network. Due to the complex operation state and the load moving with the swing arm during the operation, the force condition of the RV reducer is constantly changing. This leads to the RV reducer running in a non-stationary state, the difference in data is significant, and the small amount of training data cannot effectively identify the state of the RV reducer. After several tests, when the number of training sets reached 1000 sets, a better result was achieved for the fault state identification of the RV reducer.
The fault types include normal, planetary gear multi-tooth wear, sun gear multi-tooth wear, and compound fault. Each type of fault has 2000 samples except for the compound fault. Each sample contains 32,768 data points. To verify the model’s generalization ability, the training set and the test set are divided according to the ratio of 1: 1. The composition of the training and test sets is shown in
Table 1.
It is worth noting that the compound fault data are not involved in the model training during the whole experiment, and the whole training set only includes the vibration data of the RV reducer in three states: normal, planetary wheel wear, and sun wheel wear. After the model training, the compound fault data sample will be used to test the decoupling classification performance of the ECCN model.
4.3. Experimental Results and Analysis
To verify the effectiveness of the proposed ECCN model in the compound fault diagnosis of RV reducers, this paper selects a CNN for experimental comparison. In terms of model parameters, except for the loss function and classifier, the other parameters of the CNN model are consistent with those of the ECCN. In addition, this paper also selects the existing compound fault diagnosis methods DDCN [
8] and DECN [
31] to verify the performance of the above model in the fault diagnosis of RV reducers. In model training, all the models only use single fault training samples, including normal, multitooth wear of the sun gear, and multitooth wear of the planetary gear to train the model. CNN, DCCN, DECN, and ECCN are tested by using test samples, including single fault and compound fault. Each model is tested ten times, and the average value of the ten experiments is taken as the model’s accuracy. The diagnostic results are shown in
Table 3. The average accuracy of ECCN is 98.50%, and the average accuracy of the other three models is 70.25%, 71.5%, and 92.75%, respectively. In terms of the average accuracy, ECCN is 5.75% higher than the DDCN with the best effect among the three comparison models, and ECNN is 7% and 5% higher than CNN and DDCN in the single fault diagnosis of planetary wheel wear and solar wheel wear, respectively. In compound fault diagnosis, ECCN has been greatly improved compared with other methods, and the DCNN with the best effect in the comparison models increased the accuracy of the compound fault identification by 5%. Due to the limitation of the softmax function, CNN cannot output multiple labels for compound faults, so it is not compared.
The classification confusion matrix includes classification accuracy and misclassification error, which are important metrics for testing the classification results. In
Figure 10, the ordinate of the confusion matrix represents the real label of the sample, the abscissa represents the prediction label of the model, and labels 1, 2, and 3 represent the normal, planetary wheel wear, and solar wheel wear of the RV reducer, respectively. Labels 2&3 represent the compound fault label that is composed of the planetary wheel wear and solar wheel wear. Other labels are similar in turn. The color column on the right side represents the corresponding relationship between the value and the color.
(a), (b), (c) and (d) in
Figure 10 are the classification confusion matrices of CNN, DECN, DCNN, and the proposed method ECNN, respectively. In
Figure 12a, the accuracy of the traditional CNN in single fault identification is above 89%, and the identification effect is good. However, in the compound fault identification, 53% of the compound fault data are identified as normal data, 27% of the compound fault is identified as planetary wheel fault, and 20% of the compound fault is identified as solar wheel fault, which cannot effectively identify the compound fault data.
In
Figure 12b,c, DECN and DDCN have a good improvement in the effect of compound fault identification compared with CNN. The accuracy rates of DECN and DDCN in planetary wheel wear fault identification are 78% and 86%, respectively, which are lower than those of the CNN model (92%). In the identification of the solar wheel wear fault data, DECN outputs 60% of solar wheel wear faults with multiple labels, and the errors are identified as normal and solar wheel wear. As shown in
Figure 12d, the proposed ECCN method not only achieves 99% and 98% recognition rates of single faults such as planetary wheel wear and solar wheel wear but also achieves 97% recognition rates of compound faults without the participation of compound fault data in training. It completely exceeds CNN in the recognition of compound faults and increases by 5% compared with the better DDCN in the comparison model. It is proven that the proposed method can not only diagnose a single fault, but it is also possible to diagnose the compound fault that is composed of two types of single faults through the learning of two types of single faults of the RV reducer when the training data of the compound faults of the RV reducer is missing.
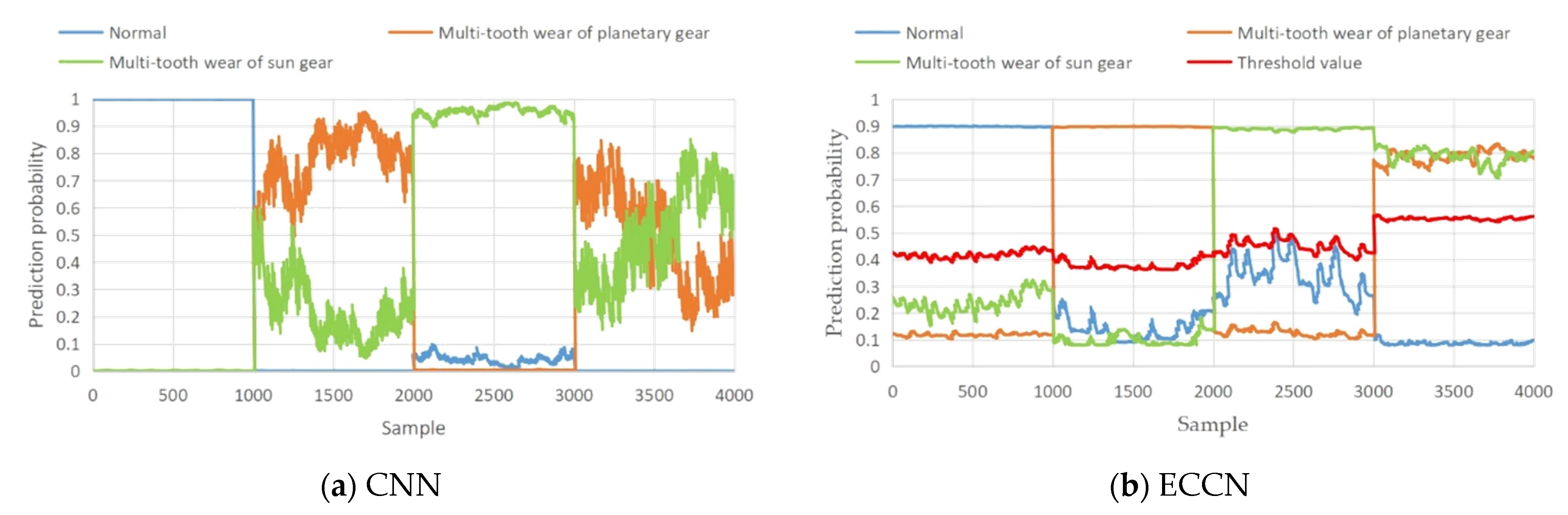
To further illustrate the multilabel output capability of ECCN for compound faults, the CNN and ECCN models are taken as examples for visual analysis. The specific steps are to extract once from the ten experiments and compare the predicted probability values on the visual test dataset, as shown in
Figure 11. The abscissa in
Figure 11 represents the sample points. The 0–1000 group data belong to the normal test data sample. The 1001–2000 group data belong to the planetary gear fault sample. The 2001–3000 group data belong to the solar gear fault sample. The 3001–4000 group data belong to the compound fault sample, and the ordinate represents the prediction probability value of the model for various types of faults. The red line in
Figure 13b is the threshold that is described in the label output of
Section 2. When the predicted probability value of a certain type of output of the model exceeds the threshold, it indicates that this type of fault exists.
As shown in
Figure 11, it can be seen from
Figure 11a that the CNN has good recognition of the normal samples of the 0~1000 group and the planetary gear fault samples of the 1001–2000 group. The normal and planetary gear fault labels are the output by the softmax function, which is consistent with the actual label. However, on the 3001–4000 group of compound fault samples, part of the compound fault samples that were identified by CNN are identified as planetary wheel wear and part of the compound fault samples are identified as sun wheel wear, which cannot produce multilabel output, that is, it adheres to the limitation that is mentioned in Chapter 1. From
Figure 13b, it can be seen that the predicted probability values of two faults in ECCN exceed the selected threshold on the Group 3001–4000 compound fault data. According to
Section 3 (Formula (13)), two probability values exceed the threshold and the model outputs two labels; namely, the sun wheel wear fault and the planetary wheel wear fault, which are consistent with the actual fault labels. It is proven that ECCN not only identifies the compound fault that is composed of planetary wheel wear and solar wheel wear but also outputs the label number of its single fault component so that the fault diagnosis of the RV reducer by the network model is closer to industrial practice.
The advantages of the ECCN method in complex fault diagnosis are analyzed. The main advantages are as follows:
- (1)
On the feature normalization and label output, the traditional CNN selects the softmax function (Formula (5)) to normalize the output features, resulting in the probability sum of all the fault categories being 1. The occurrence of the solar and planetary gear faults is forced to be regarded as a mutually exclusive event, and the fault features cannot be output independently.
- (2)
In addition, in terms of label output, the traditional CNN uses the argmax function (Formula (6)) to index the maximum value of the output feature, so that the network can only output the fault feature with the strongest feature. Therefore, as shown in
Figure 4 and
Figure 13a, the CNN classifier can only output a single fault label with the largest probability in the compound fault sample, and a fault label with a weak fault will not be able to output. The proposed ECCN uses the squashing activation function (Formula (11)) to independently normalize the fault characteristics and uses the L2 norm to independently output the occurrence probability of each fault, ensuring the independence of each fault identification. Therefore, the ECCN can independently identify and output the fault characteristics of planetary wheel wear and solar wheel wear in compound faults and implement the multi-label output of compound faults, as shown in
Figure 13b.
- (3)
In terms of the training loss function, the traditional CNN uses the binary classification cross entropy-loss function (Formula (7)) to train the model. When a certain type of fault exists, the loss value of other types of faults is zero, resulting in a strong mutual exclusion of the extracted features of the trained model. ECCN uses the margin loss function (Formula (14)) to train each fault class, which ensures that the fault features that are extracted from the various faults are relatively independent and avoids the problem of being unable to identify compound fault information.
4.4. Added Experiments
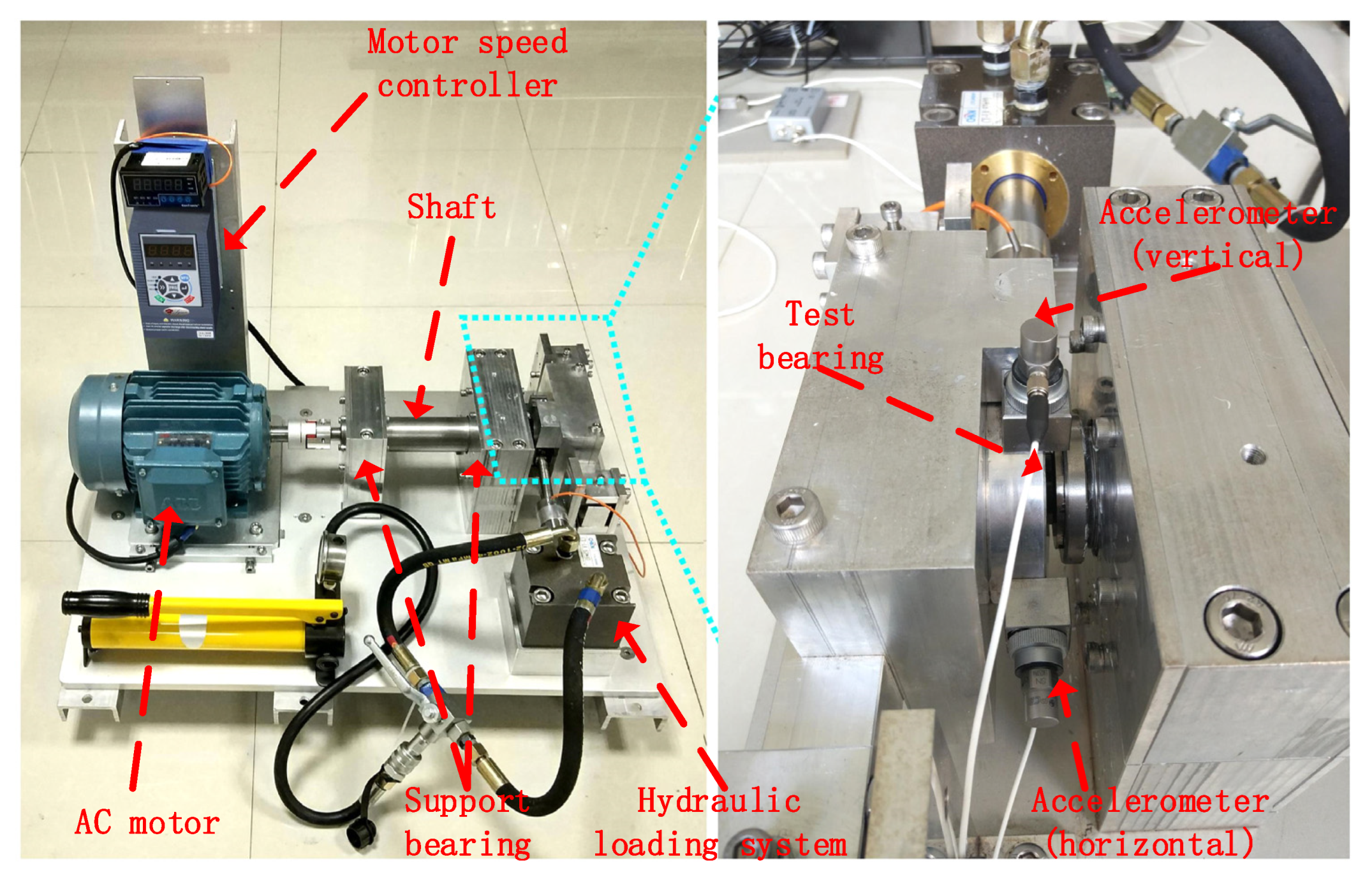
To verify the universality of the proposed method, the XJTU-SY rolling bearing accelerated life test dataset is used to verify the proposed method. The dataset of the XJTU-SY rolling bearing accelerated life test is from Xi’an Jiaotong University. The experimental platform is shown in
Figure 14 below. The experimental platform is mainly composed of an AC motor, motor speed controller, shaft, support bearing, hydraulic loading system, and test bearing. The detailed parameters of the test bench and data introduction are in Reference [
32].
The accelerated life test dataset of the XJTU-SY rolling bearing has 15 sets of bearing life-cycle data. The failure modes of bearing1_1, bearing2_1, and bearing1_5 are the outer ring fault, inner ring fault, and inner and outer ring compound fault, respectively. In this experiment, the last set of data from Bearing1_1, Bearing2_1, and Bearing1_5 full-life data are selected as the fault data. The real fault data are used to test the effectiveness of the ECCN model on compound fault diagnosis. The failure picture is shown in
Figure 15, and the data of the experiment are described in
Table 4. There are four state data: normal, inner ring fault, outer-ring fault, and inner-ring and outer-ring compound fault. In addition to the inner and outer ring compound fault, each state generates 200 training data and 200 test data, the sample length is 4096, and the sample partition rule is the same as
Section 3.1.
It is worth noting that the 200 compound fault data are only used for model testing and are not involved in model training. The normal data in
Table 4 are taken from the first data in the Bearing1_5 life-cycle data. At the time of the experiment, the bearing has not been damaged in the normal state at the beginning of the experiment, so it is selected as the normal sample data.
The model parameters are consistent with the description in
Section 3.2. The experimental results are the average of 10 experimental tests. The accuracy is shown in
Table 5, and the classification effect is shown in
Figure 16.
As shown in
Table 5, ECCN and CNN have 100% accuracy in the three single fault states of normal bearing, inner ring fault, and outer ring fault. Compared with DECN and DDCN, the highest accuracy is 59% and 70.4%, which are increased by 41% and 29.6%, respectively. In the recognition of compound faults, ECCN has a high accuracy of 91.35%. Compared with the accuracy of 34.8% of DECN and 69.5% of DDCN, the accuracy of the compound fault recognition is increased by 56.5% and 21.85%, respectively. The experimental results show that ECCN not only has a good effect on the fault diagnosis of the bearing inner ring and outer ring. Through the learning of two types of single faults, it is also possible to identify compound faults in which the inner and outer rings fail at the same time.
In order to show the classification effect of ECCN more clearly, this paper uses the classification confusion matrix to display the classification results of the four methods. The differences in the identification of the compound faults between the different methods are compared and analyzed. As shown in
Figure 16, in the CNN method, 60% of the compound fault data of the inner and outer rings are identified as outer ring faults, and 20% of the compound fault data of the inner and outer rings are identified as inner ring faults. Therefore, similar to the RV experiment, when the training data for composite faults is lacking, CNN cannot effectively identify the faults.
Although DECN and DDCN have accuracy rates of 34.8% and 69.5% in the identification of compound faults, they have poor identification results for the three states of normal bearing, inner ring fault, and outer ring fault. Among them, 32% of the normal bearing is identified as an inner ring and normal data by the DECN method, 66% of the outer ring fault data is identified as normal, and 33% of the inner ring fault is identified as an inner and outer ring compound fault. The DDCN method divides the normal fault into an outer loop fault, 19% of the outer loop fault is identified as an outer loop plus normal, and 46% of the inner loop fault is identified as an inner and outer loop compound fault. Compared with DDCN and DECN, the proposed method not only has a better effect on bearing single fault identification, but also achieves 91% accuracy in bearing composite fault identification, and has better results in both single fault and composite faults.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}