
Design and On-Field Validation of an Embedded System for Monitoring Second-Life Electric Vehicle Lithium-Ion Batteries

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. Theoretical Background
2.1. EV Li-Ion Batteries Second-Life Applications
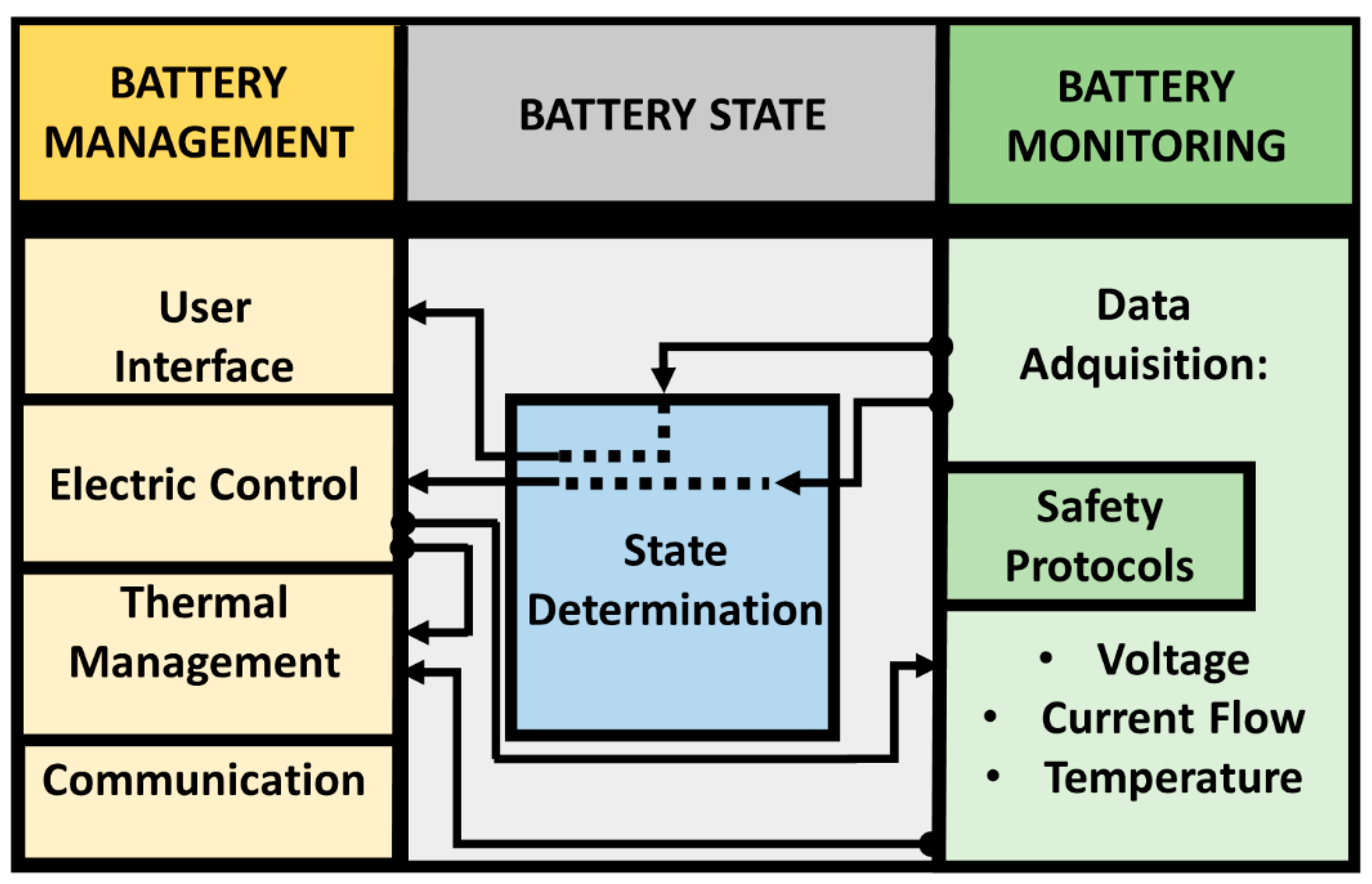
2.2. Battery Management System: BMS
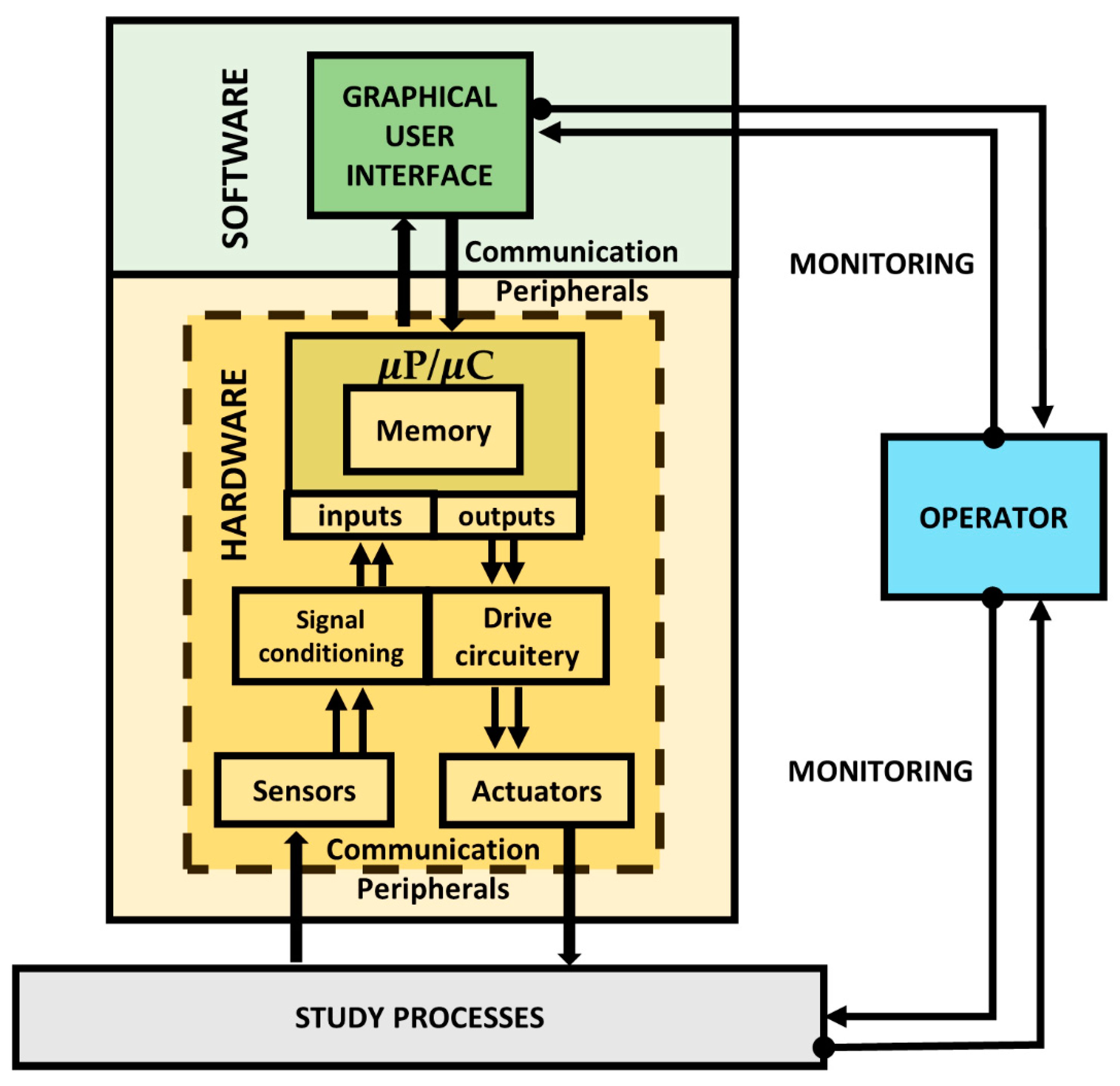
2.3. Embedded Systems
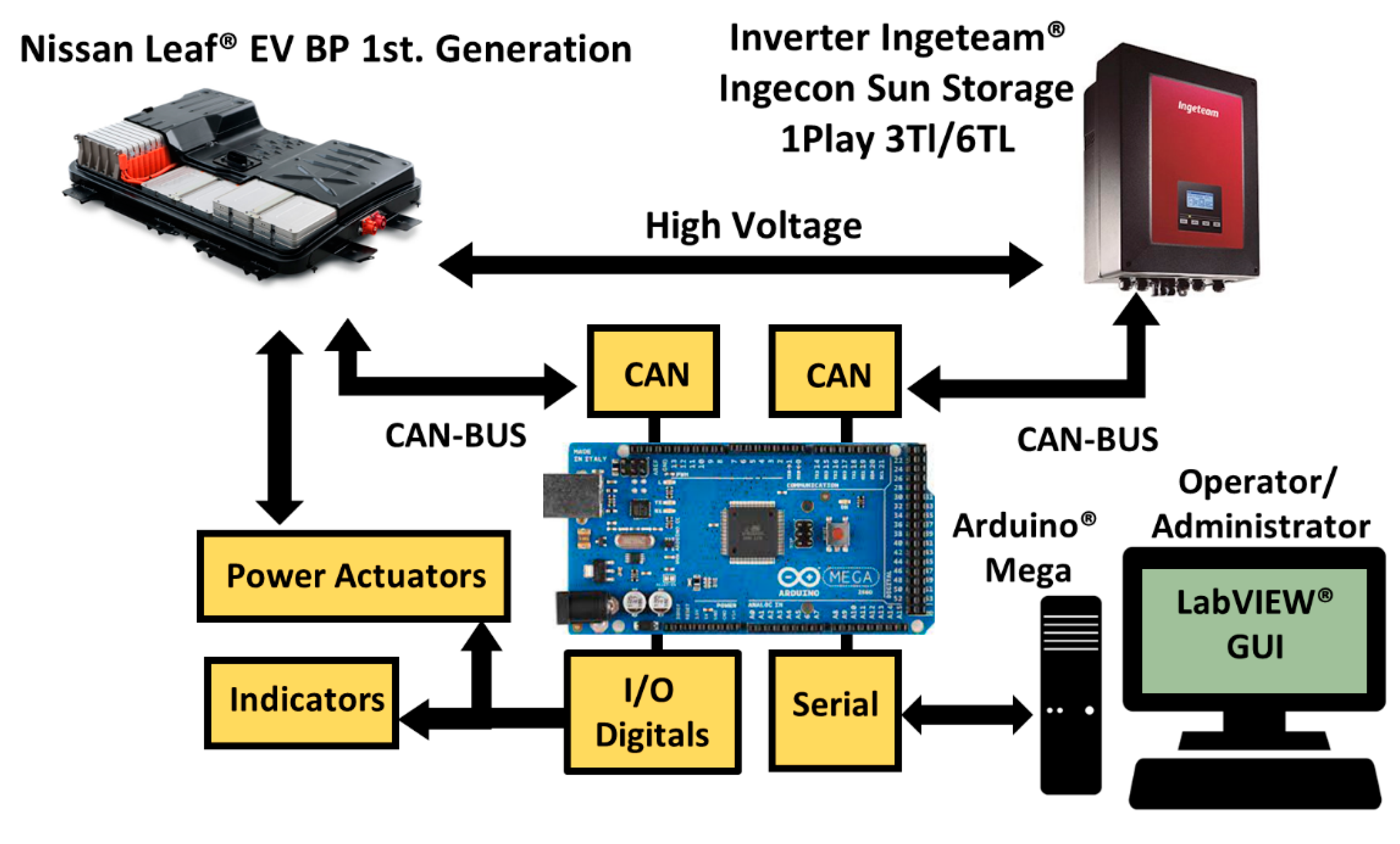
3. Materials and Methods
4. Embedded System Design for Monitoring Second-Life EV Li-Ion Batteries
4.1. Communication Processes between the BMS and Li-Ion Battery
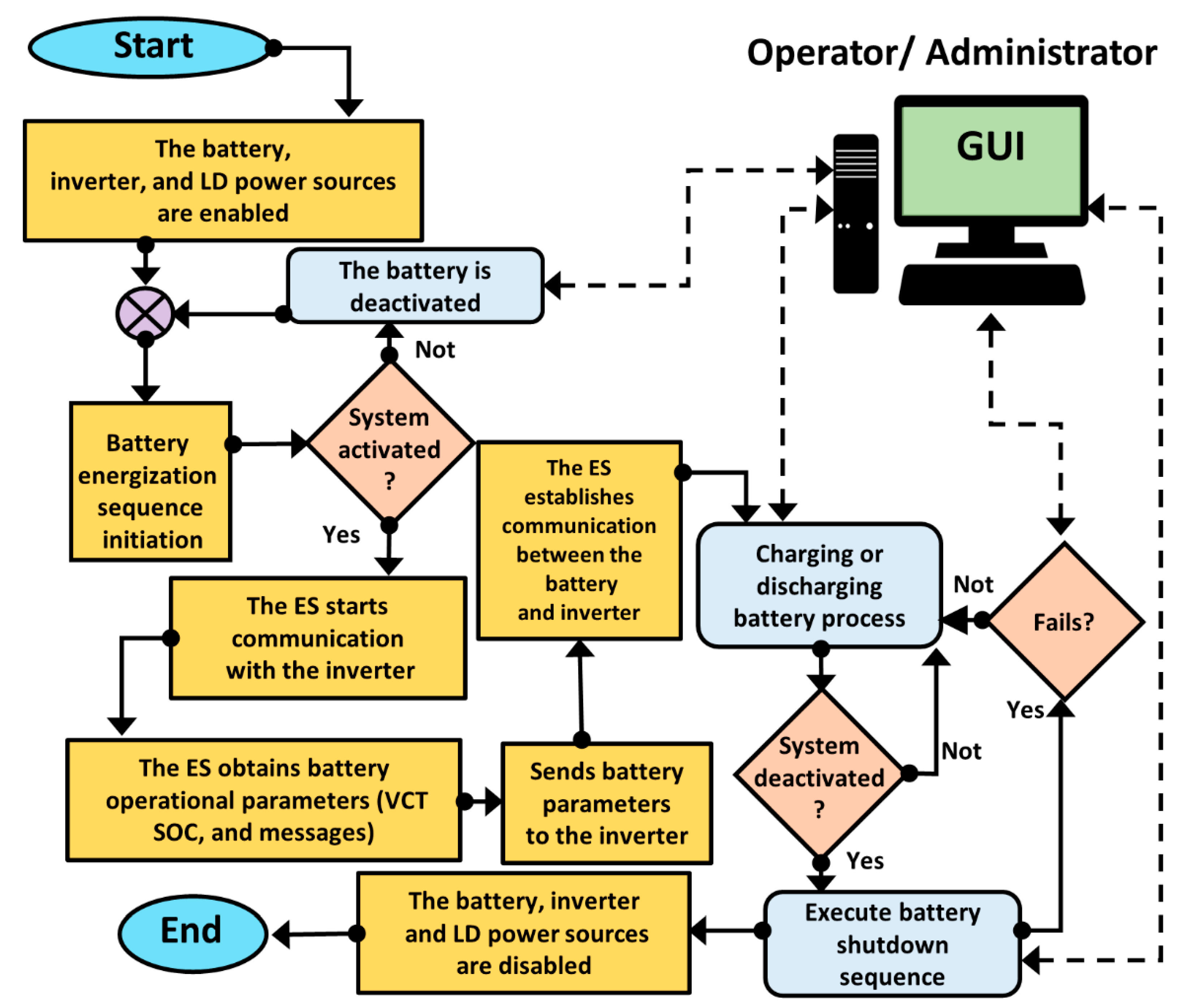
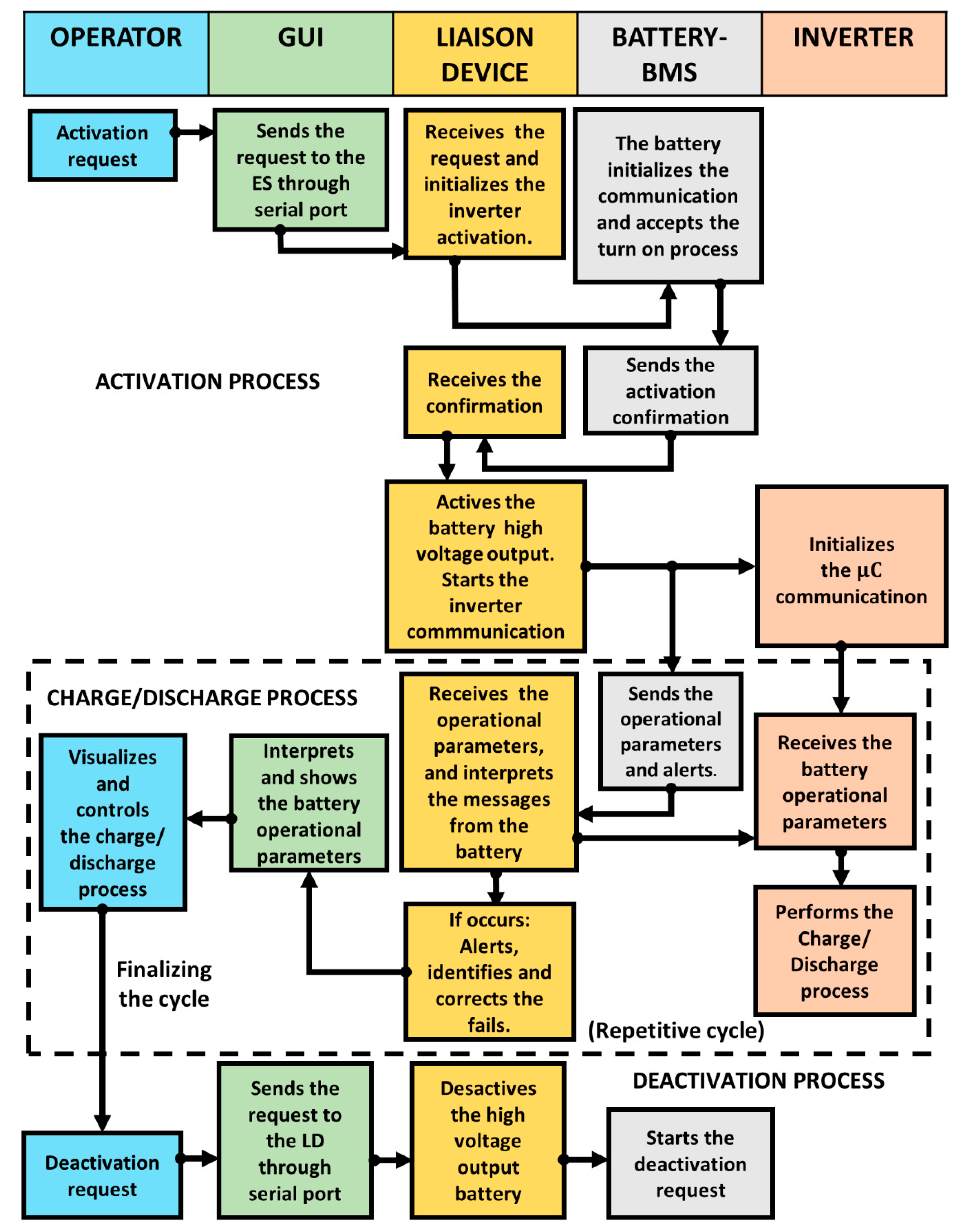
4.2. Second-Life EV Li-Ion Battery Work Sequence
4.3. Logical Design of the ES Operation
4.4. Liaison Plug-and-Play Device
4.5. Graphical User Interface-GUI
- The serial port control allows the user to select the communication port through which the μC is connected to the PC, while the stop button reestablishes the connection and stops data acquisition and display.
- The interface control section allows the user to switch the hardware-interface ON/OFF. This section also shows the BMS and inverter connection status and if they are currently communicating with the μC.
- The serial port data section shows the messages received and its sole function is to display current activity.
- Message section A displays real-time battery data such as voltage and current flow, relay cut requests, main relay on, full charge, interlock, discharge power status.
- Message section B monitors real-time battery data such as remaining capacity, new full capacity, remaining capacity segment, remaining capacity segment switch, SOC, average temperature, output power limit reason, and remaining charge time.
- Message section C displays real-time battery data such as switch flag, high/low voltage times, temperature, wakeup phase, integrated current, cell voltage, state of health, and DTC, which is a variable with battery diagnosis information.
- Message section D displays real-time battery data such as SOC, IR sensor wave voltage, ALU answer (a diagnosis register for the CAN communication), IR sensor Malf (an alarm triggered if the insulation resistance sensor is malfunctioning), capacity empty, and refuse to sleep.
- Message section E monitors the real-time battery charge/discharge process data such as discharge power limit, charge power limit, charge power status, maximum power charge, and battery pack maximum UPRATE.
- The flags section uses virtual LED indicators to monitor the charge and discharge status such as overcharge, high voltage, high current, stop requests, over discharge, low voltage, and high current as well as the general battery status, as follows: high temperature, insulation resistance, CAN communication error, and unavailable values. Finally, the flags section mentions the current status of the relays.
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BMS | Battery Management System |
| BP | Battery Pack |
| CAN | Controller Area Network |
| DAQ | Data Acquisition |
| ES | Embedded System |
| EV | Electric Vehicle |
| ESS | Energy Storage System |
| HV | High Voltage |
| HMI | Human Machine Interface |
| IDE | Integrated Development Environment |
| GUI | Graphical User Interface |
| LD | Liaison Device |
| Li-ion | Lithium-ion |
| PLC | Programmable Logic Control |
| PMS | Power Management System |
| PV | Photovoltaic |
| SOC | State of Charge |
| SOH | State of Health |
| SOL | State of Life |
| SOP | State of Available Power |
| VCT | Voltage-Current flow-and-Temperature |
| VMS | Vehicle Management System |
| μC | Microcontroller |
| μP | Microprocessor |
References
- Helmers, E.; Marx, P. Electric cars: Technical characteristics and environmental impacts. Environ. Sci. Eur. 2012, 24, 14. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Li, Y.; Grundish, N.S.; Goodenough, J.B.; Chen, Y.; Guo, L.; Peng, Z.; Qi, X.; Yang, F.; Qie, L.; et al. The 2021 battery technology roadmap. J. Phys. D Appl. Phys. 2021, 54, 183001. [Google Scholar] [CrossRef]
- Nicoletti, G.; Arcuri, N.; Nicoletti, G.; Bruno, R. A technical and environmental comparison between hydrogen and some fossil fuels. Energy Convers. Manag. 2015, 89, 205–213. [Google Scholar] [CrossRef]
- IRENA. Electric Vehicles. Available online: https://www.irena.org/transport/Electric-Vehicles (accessed on 6 June 2022).
- U.S. Department of Energy. Green Power: Make Your Plug-In Vehicle Even Greener. Available online: https://www.fueleconomy.gov/feg/greenpower.shtml (accessed on 6 June 2022).
- Smith, K.; Keyser, A.S.M.; Lundstrom, B.; Cao, Z.; Roc, A. Life prediction model for grid-connected Li-ion battery energy storage system. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017. [Google Scholar]
- McKinsey and Company. Second-Life EV Batteries: The Newest Value Pool in Energy Storage. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/second-life-ev-batteries-the-newest-value-pool-in-energy-storage (accessed on 6 June 2022).
- Casals, L.C.; García, B.A.; Cremades, L.V. Electric vehicle battery reuse: Preparing for a second life. J. Ind. Eng. Manag. 2017, 10, 266–285. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Monem, M.; Hegazy, O.; Omar, N.; Trad, K.; Bossche, P.V.D.; Van Mierlo, J. Lithium-ion batteries: Comprehensive technical analysis of second-life batteries for smart grid applications. In Proceedings of the 19th European Conference on Power Electronics and Applications, Warsaw, Poland, 11–14 September 2017. [Google Scholar]
- Braco, E.; San Martín, I.; Berrueta, A.; Sanchis, P.; Ursúa, A. Experimental Assessment of First- and Second-Life Electric Vehicle Batteries: Performance, Capacity Dispersion, and Aging. IEEE Trans. Ind. Appl. 2021, 57, 4107–4117. [Google Scholar] [CrossRef]
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Alvi, M.J.; Kim, H.J. Towards a Smarter Battery Management System for Electric Vehicle Applications: A Critical Review of Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef] [Green Version]
- Yuheng, L.; Xuezhe, W.; Zechang, S. Low Power Strategy Design for Battery Management System. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009. [Google Scholar]
- Rahman, A.; Rahman, M.; Rashid, M. Wireless Battery Management System of Electric Transport. In Proceedings of the 6th International Conference on Mechatronics—ICOM’17, Kuala Lumpur, Malaysia, 8–9 August 2017. [Google Scholar]
- Yang, P.; Yu, H.; Yan, Y. Implementation of the Li-ion Battery Management System based on DS2438. Appl. Mech. Mater. 2015, 733, 714–717. [Google Scholar] [CrossRef]
- Salamati, S.M.; Huang, C.S.; Balagopal, B.; Chow, M.Y. Experimental battery monitoring system design for electric vehicle applications. In Proceedings of the 2018 IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Hamilton, New Zeland, 31 January–2 February 2018. [Google Scholar]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Petch, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Wahad, M.H.A.; Anuar, N.I.M.; Ambar, R.; Baharum, A.; Shanta, S.; Sulaiman, M.S.; Fauzi, S.S.M.; Hanafi, H.F. IoT-Based Battery Monitoring System for Electric Vehicle. Int. J. Eng. Technol. 2018, 7, 505–510. [Google Scholar]
- Jamaluddin, A.; Sihombing, L.; Supriyanto, A.; Purwanto, A.; Nizam, M. Design real time battery monitoring system using LabVIEW interfface for arduino (LIFA). In Proceedings of the 2013 Joint International Conference on Rural Information & Communication Technology and Electric-Vehicle Technology (rICT & ICeV-T), Bandung, Indonesia, 26–28 November 2013. [Google Scholar]
- Qahtan, M.H.; Mohammed, E.A.; Ali, A.J. IoT-based electrical vehicle’s energy management and monitoring system. Open Access Libr. J. 2022, 9, 1–15. [Google Scholar] [CrossRef]
- Soylu, E.; Soylu, T.; Bayir, R. Design and implementation of SOC predition for a Li-ion battery pack in an electric car with an embedded system. Entropy 2017, 19, 146. [Google Scholar] [CrossRef] [Green Version]
- Locorotondo, E.; Cultrera, V.; Pugi, L.; Berzi, L.; Pasquali, M.; Andrenacci, N.; Lutzemberger, G.; Pierini, M. Electrical lithium battery performance model for second life applications. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Madrid, Spain, 9–12 June 2020. [Google Scholar]
- Fleming, J.; Amietszajew, T.; Roberts, A. In-Situ electronics and communications for intelligent energy storage. HardwareX 2022, 11, e00294. [Google Scholar] [CrossRef] [PubMed]
- Casals, L.C.; García, B.A. Assessing Electric Vehicles Battery Second Life Remanufacture and Management. J. Green Eng. 2016, 6, 77–98. [Google Scholar] [CrossRef] [Green Version]
- Mommalai, C.; Khomfoi, S. Battery monitoring system detecting dead battery cells. In Proceedings of the 2015 12th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Hua Hin, Thailand, 24–27 June 2015. [Google Scholar]
- Wang, H.; Xue, C.; Liu, Y.; Li, G. Design and application of monitoring system of Li-ion battery pack. Int. J. Hybrid Inf. Technol. 2014, 7, 393–400. [Google Scholar] [CrossRef]
- Smith, M.T.; Herron, A., Jr.; Tolbert, L.M.; Starke, M.R.; King, D.J. Autonomous Battery Identification and Health Parameterization. In Proceedings of the Power Industry Division Symposium, Knoxville, TN, USA, 26–28 June 2018; Oak Ridge National Lab. (ORNL): Oak Ridge, TN, USA. [Google Scholar]
- Braco, E.; San Martín, I.; Ursúa, A.; Sanchis, P. Incremental capacity analysis of lithium-ion second-life batteries from electric vehicles under cycling ageing. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Bari, Italy, 7–10 September 2021. [Google Scholar]
- Van Den Hoed, R. Commitment to fuel cell technology? How to interpret carmakers’ efforts in this radical technology. J. Power Sources 2005, 141, 265–271. [Google Scholar] [CrossRef]
- Jiao, N.; Evans, S. Secondary use of electric vehicle batteries and potential impacts on business models. J. Ind. Prod. Eng. 2016, 33, 348–354. [Google Scholar] [CrossRef]
- Braco, E.; San Martín, I.; Berrueta, A.; Sanchis, P.; Ursúa, A. Experimental assessment of cycling ageing of lithium-ion second-life batteries from electric vehicles. J. Energy Storage 2020, 32, 101695. [Google Scholar] [CrossRef]
- Pandur, Z.; Šušnjar, M.; Bačić, M. Battery Technology–Use in Forestry. Croat. J. For. Eng. 2017, 42, 135–148. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- Zhang, P. Advances Industrial Control Technology, 1st ed.; Elsevier: Oxford, UK, 2010; pp. 3–6. [Google Scholar]
- Soto, A.; Berrueta, A.; Zorrilla, P.; Iribarren, A.; Castillo, D.H.; Rodríguez, W.E.; Rodríguez, A.J.; Vargas, D.T.; Matias, I.R.; Sanchis, P.; et al. Integration of second-life battery packs for self-consumption applications: Analysis of a real experience. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Bari, Italy, 7–10 September 2021. [Google Scholar]
- Anderman, M. Assessing the Future of Hybrid and Electric Vehicles: The xEV Industry Insider Report, 2nd ed.; Advanced Automotive Batteries: San Diego, CA, USA, 2014. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | |
|---|---|---|---|
| Manufacturer specifications | Nominal capacity | 66.2 | Ah |
| Nominal energy | 24 | kWh | |
| Nominal voltage | 360 | V | |
| Maximum voltage | 403.2 | V | |
| Minimum voltage | 240 | V | |
| Weight | 293 | kg | |
| Dimensions L × W × H | 1570.5 × 1188 × 264.9 | mm | |
| Modules in serial connection (2s2p) | 48 | - | |
| Measured parameters | Current capacity | 38.8 | Ah |
| Current energy | 14.2 | kWh | |
| Energy efficiency | 96 | % | |
| Coulombic efficiency | 99.7 | % | |
| SOH | 58.6 | % |
| Stage | Process | Steps | Description |
|---|---|---|---|
| 1 | Activation |
| During the process to turn on the battery, the embedded system is able to control the BMS and to comply with the current process. The battery is ready to perform the charge/discharge process. |
| 2 | Charge/Discharge |
| In this process, the battery is available to be charged/discharged. The BMS periodically sends the operating parameters to the embedded system and to the inverter. |
| 3 | Deactivation |
| The BMS outputs high voltage and the power supply is deactivated. |
| Without PV and ESS | Only with PV | With PV and ESS | |
|---|---|---|---|
| Peak power absorbed from the grid (kW) | 6.9 | 6.9 | 5.1 |
| Energy consumed from the grid (kWh) | 235.5 | 149.7 | 78.3 |
| Self-consumption ratio (%) | - | 36.4 | 66.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo-Martínez, D.H.; Rodríguez-Rodríguez, A.J.; Soto, A.; Berrueta, A.; Vargas-Requena, D.T.; Matias, I.R.; Sanchis, P.; Ursúa, A.; Rodríguez-Rodríguez, W.E. Design and On-Field Validation of an Embedded System for Monitoring Second-Life Electric Vehicle Lithium-Ion Batteries. Sensors 2022, 22, 6376. https://doi.org/10.3390/s22176376
Castillo-Martínez DH, Rodríguez-Rodríguez AJ, Soto A, Berrueta A, Vargas-Requena DT, Matias IR, Sanchis P, Ursúa A, Rodríguez-Rodríguez WE. Design and On-Field Validation of an Embedded System for Monitoring Second-Life Electric Vehicle Lithium-Ion Batteries. Sensors. 2022; 22(17):6376. https://doi.org/10.3390/s22176376
Chicago/Turabian StyleCastillo-Martínez, Diego Hilario, Adolfo Josué Rodríguez-Rodríguez, Adrian Soto, Alberto Berrueta, David Tomás Vargas-Requena, Ignacio R. Matias, Pablo Sanchis, Alfredo Ursúa, and Wenceslao Eduardo Rodríguez-Rodríguez. 2022. "Design and On-Field Validation of an Embedded System for Monitoring Second-Life Electric Vehicle Lithium-Ion Batteries" Sensors 22, no. 17: 6376. https://doi.org/10.3390/s22176376