1. Introduction
Distributed acoustic sensing (DAS) is an attractive fiber optic sensing technology for spatially continuous acoustic signal measurements over long distances. By using a wide range of optical cables, various vibration sources in the surrounding environment can be sensed with high sensitivity and located precisely [
1,
2,
3,
4]. DAS has been widely employed in many fields such as railway transportation [
5,
6], perimeter security [
7], pipeline security [
8,
9], etc. Applying DAS technology to the field of underwater acoustic sensing gives birth to a new type of fiber-optic hydrophone (FOH), distributed fiber optic hydrophone (DFOH). Conventional FOHs are point sensors and need to be formed into arrays to detect acoustic signals [
10,
11,
12,
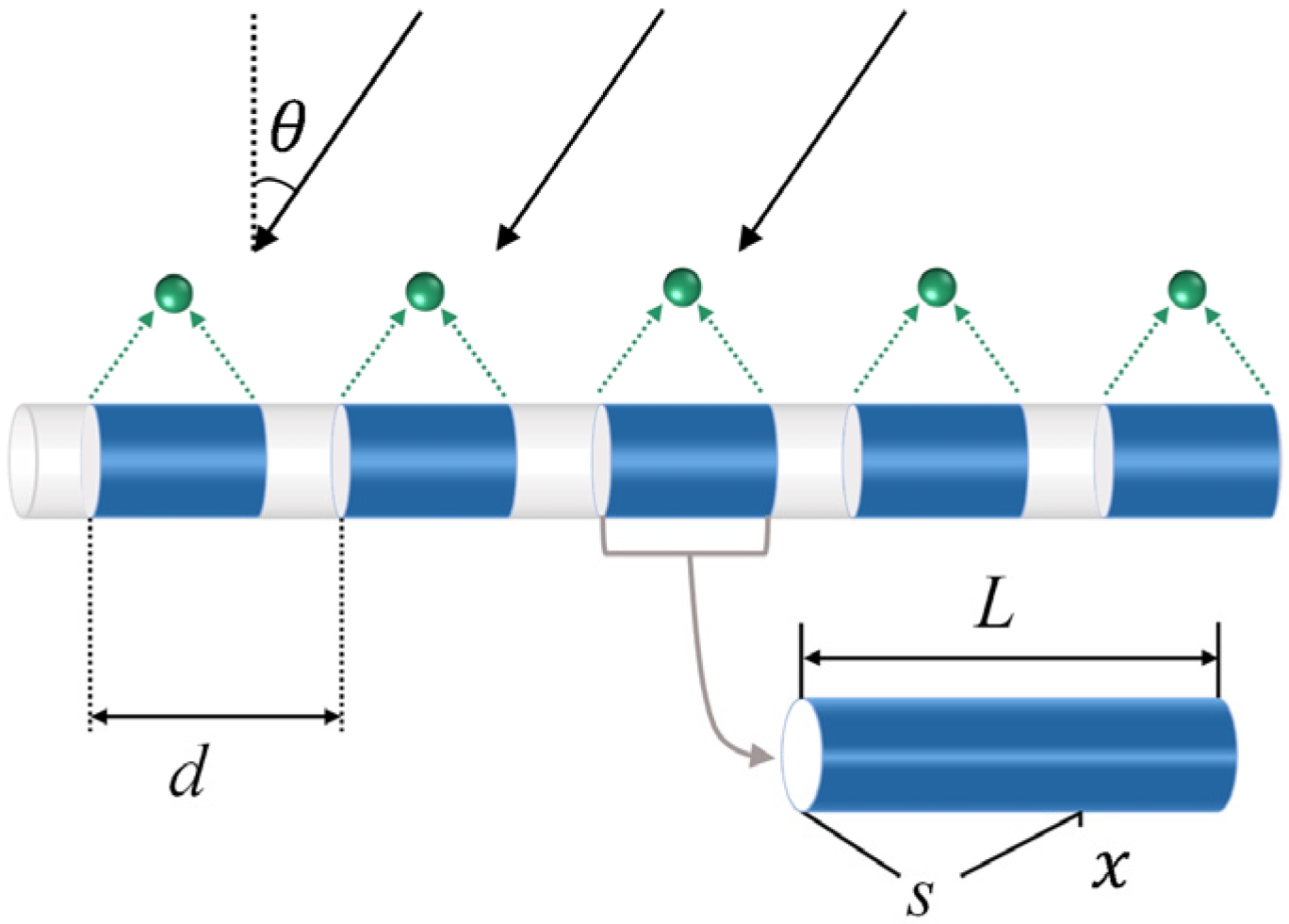
13]. A DFOH functions as an FOH array and interrogates acoustic signals utilizing DAS technology. Compared to a conventional FOH array, a DFOH has some unique advantages. Firstly, it can pick up underwater acoustic signals continuously in space thanks to the DAS technology. Secondly, as shown at the bottom of
Figure 1 [
14], a DFOH is basically comprised of only fiber. However, as shown at the top of
Figure 1, a conventional FOH consists of many fiber optic components such as fiber couplers and Faraday rotation mirrors. A simple structure of a DFOH makes it more reliable than a conventional FOH.
A FOH array is designed to orientate acoustic signals, and its directivity is specified by usage of a directivity function. The width of the main lobe and the height of the side lobe are two key parameters of a directivity function, and they are expected uniquely in different practical use. The two parameters are determined by the array structure of a FOH array such as the length of a sensing channel and the space between two adjacent channels. For a conventional FOH array, the array structure is fixed. Accordingly, the directivity function of the array is unique, which limits the array in widely practical use. Benefiting from DAS technology, the sensing channel length and sensing channel space of a DFOH are set in signal processing and thus are changeable. This makes a DFOH perform changeable directivity and be applicable to various practical use. To meet the directivity requirement in a particular application, the array structure of a DFOH has to be carefully designed in signal processing, and the dependence of the directivity function on the array structure of a DFOH is expected firstly. Currently, there are few studies reported on the dependence of the directivity function on the array structure of a DFOH. Lu et al. developed a DFOH and analyzed its performance [
15]. Only the response of a sensing channel on the orientation of detected acoustic signals was theoretically analyzed, and the directivity function of the DFOH was not studied. Besides, no experiments were performed to verify the theoretical analysis.
This paper focuses on the dependence of directivity function on the array structure of a DFOH. The directivity function of a sensing channel and that of a DFOH are derived. Based on the directivity function, the simulations are performed to theoretically analyze the dependence of the array directivity function on the array structure. Finally, the theoretical analysis is verified by the experiments. In the experiment, a DFOH system including a DFOH and a DAS system based on phase-sensitive optical time-domain reflectometry (Φ-OTDR) is utilized [
16].
2. Directivity Function of a DFOH
We shall firstly define the structural parameters of a DFOH. Typically, a DFOH is comprised of a sensing fiber wrapped continuously around an elastic cylinder at a certain wrapping ratio
. Here, the ratio
is defined as the ratio of the length of a wrapped fiber to the length of the elastic cylinder. On the signal processing end, a DFOH is virtually divided into a sequence of discrete sensing channels in tandem with identical space
, and the number of the channels is
. The length of a sensing channel is
L =
G/
R, where
G refers to the gauge length in a DAS system. For a DAS system that interrogates a phase of Rayleigh backscattering light-waves (RBLs) along a sensing fiber [
17,
18],
G can be specified arbitrarily. As a result, the length
of a sensing channel is adjustable. Channel spacing
d can be shorter than the length of a sensing channel
since the channels are virtually divided and initial points can be selected arbitrarily. In other words, two adjustable sensing channels can overlap each other, which is impossible for a conventional FOH array.
2.1. Directivity Function of a Sensing Channel
A sensing channel in a DFOH transduces external acoustic signals to the phase change of a Rayleigh backscattered light (RBL). As shown in
Figure 2,
L is the length of a sensing channel,
x is a reference position in the channel, and
is the distance between
x and the initial point of the channel [
19,
20]. As a far-field acoustic signal orientated at an angle
θ to the radial direction of a sensing channel is imposed on the sensing fiber wrapped on the channel, the refractive index of the fiber at position
x of the sensing channel is changed by
where
,
ω, and
λ are the sound pressure, angler frequency, and the wavelength of the acoustic signal, respectively, and
η is a composite response coefficient [
21,
22]. Accordingly, the phase change as the output of the sensing channel is calculated as [
23,
24,
25]
where
λl is the wavelength of a light-wave propagating in the sensing fiber, and the coefficient 2 arises from the round trip that a light-wave undergoes. Applying Equation (1) to Equation (2) gives (see
Appendix A for the detailed derivation)
where
,
is the amplitude of the output phase
, and
is a coefficient and is expressed as
Equation (3) indicates that the output phase of a sensing channel oscillates at the identical frequency to the acoustic signal with a phase delay determined by , , and θ. In addition, the amplitude of the phase is governed by the coefficient B1. As Equation (4) reveals, varies with θ. As a result, the amplitude of the output phase becomes directive, and this directivity is more obvious as the ratio becomes larger. Considering the dependence of B1 on θ, B1 is defined as the directivity function of a sensing channel.
Essentially, a sensing channel is equivalent to a sequence of point sensors continuously distributing along the sensing channel with identical spacing. Because the acoustic signal arrives at the sensors at a different time, there exists a constant phase delay δφ between the output phase of two adjacent sensors, and δφ various with θ. The output phase of a sensing channel is the sum of the output phase of all the point sensors, and its amplitude is determined by δφ. Since δφ varies with θ, the amplitude becomes directive. As the ratio increases, the phase delay between the output phase of two points sensors located at two ends of the sensing channel increases, and thus the amplitude of becomes more directive.
2.2. Directivity Function of a DFOH
The directivity of a DFOH results from the phase delay between two adjacent sensing channels. In order to eliminate the impact of the phase delay
in Equation (3) on the directivity of a DFOH, the reference positions of all the sensing channels in the DFOH are selected at the identical position relative to their own initial points. For simplification,
is set in Equation (3). Accordingly,
is obtained, and Equation (3) is reduced to
To obtain the directivity function of a DFOH, a DFOH is considered as a linear discrete FOH array consisting of a sequence of discrete sensing channels in tandem with identical space
, and the number of the channels is
. Adding up the output phase changes of all the sensing channels leads to an output phase of a DFOH. The normalized amplitude of the output phase is the directivity function of the DFOH, and is given by:
Equation (6) indicates that the directivity function of a DFOH is the product of the directivity functions of a sensing channel and a conventional linear discrete FOH array. In addition, Equation (6) reveals that the directivity function of a DFOH is dependent on the structure of a DFOH such as the channel length and channel spacing .
3. Directivity Dependence of a DFOH on Array Structure Parameters
For a well-developed FOH array, the directivity function of the array is fixed since the channel length and channel spacing cannot be changed. In comparison, the channel length and channel spacing of a DFOH are adjustable, which makes it possible to desire the directivity function of a DFOH even if the DFOH is well developed. In this section, the simulation proceeds based on Equation (4) to analyze the effects of channel length and channel spacing of a DFOH on the directivity function, especially focusing on the effects on the main lobe and side lobe of the directivity function. Considering the fact that the total length of the well-developed DFOH is fixed, the total length of the DFOH is set as a constant in the following analysis. Besides the structure of a DFOH, the directivity function is also determined by the wavelength of an acoustic signal, as Equation (4) indicates. In order to study the universal law applicable to acoustic signals of all wavelengths, rather than the law only for a particular wavelength, the channel length and the channel spacing are normalized as and , respectively.
3.1. Channel Length
The dependence of directivity function
B on
is analyzed firstly. In the simulation, the total length of a DFOH is set as
with
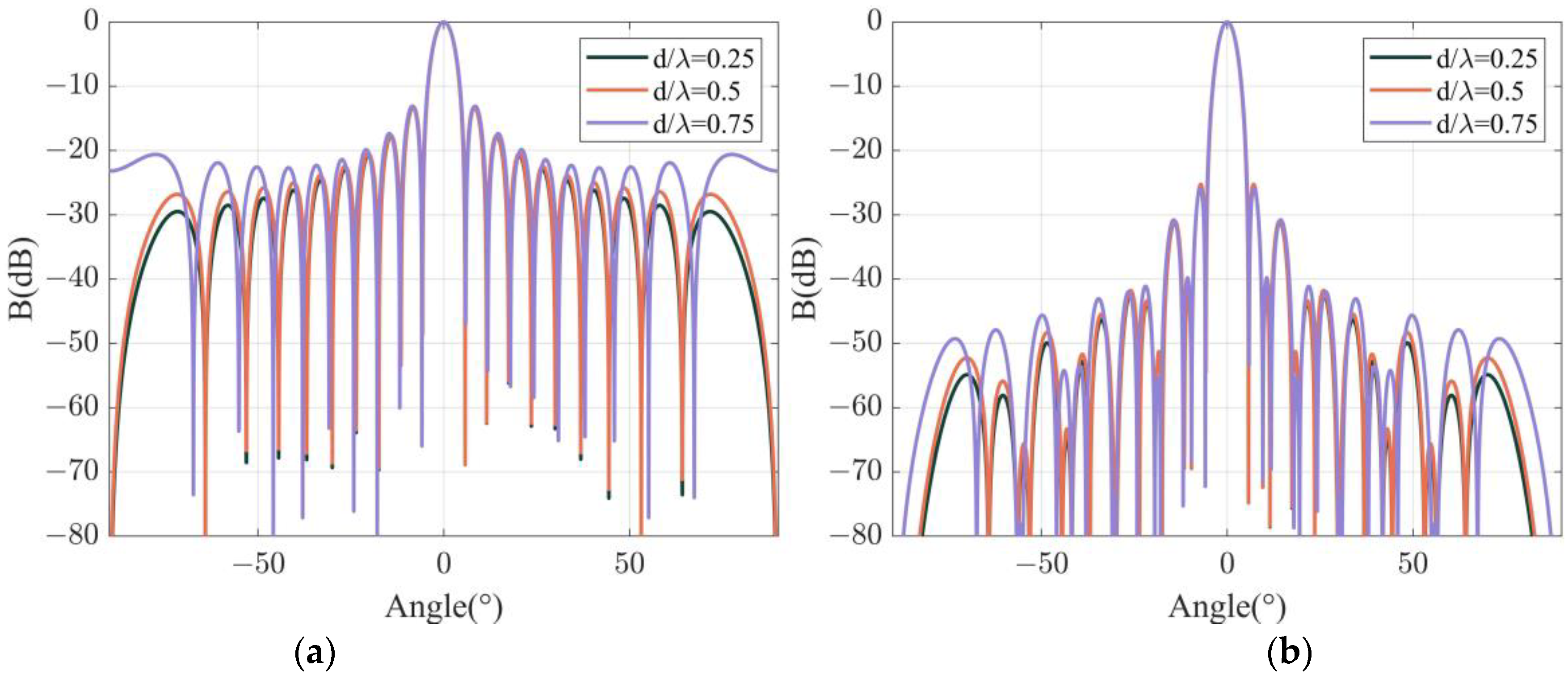
being the number of sensing channels. In the case of
, four directivity functions are simulated and are presented in
Figure 3a as
are set as 0.25, 0.75, 1, and 6. The widths of the main lobes and the heights of the first side lobes are shown in
Table 1. The simulation results show that as
increases from 0.25 to 6, the widths of the main lobes are 5.04°, 5.04°, 5.04°, and 4.41°, respectively. The widths of the main lobes remain stable in the case of
and decrease in the case of
. In addition, the height of the side lobes at the same angle decreases as
increases, and it decreases more dramatically at larger angles. The heights of the first side lobes are −13.26 dB, −13.41 dB, −13.54 dB, and −25.31 dB, respectively. The conclusions mentioned above are also valid in the cases of
= 0.75, which are confirmed by the simulation results shown in
Figure 3b and
Table 2.
The dependence of directivity function B on the channel length analyzed above originates from the directive response of a sensing channel B1 to external acoustic signals. As Equation (2) indicates, the response of a sensing channel is more directive as the sensing channel becomes longer, leading to more of a directive response from a DFOH.
3.2. Channel Spacing
The effect of channel spacing is analyzed in this section. The total length of a DFOH is set to
as in
Section 3.1. When
, three directivity functions are simulated and are shown in
Figure 4a as
is set as 0.25, 0.5, and 0.75. The widths of the main lobes and the heights of the first side lobes are shown in
Table 3. The simulation results show that when
increases, the widths of the main lobes are 5.04°, 5.04°, and 5.21°, respectively. Additionally, the heights of the first side lobes are −13.26 dB, −13.21 dB, and −13.11 dB, respectively. Both the main lobes and the first side lobes change slightly in the above simulation, and it is also valid when
= 6, which is shown in
Figure 4b and
Table 4. Specifically, when
= 6, the widths of the main lobes are 4.41°, 4.41°, and 4.47°, respectively. Additionally, the heights of the first side lobes are −25.31 dB, −25.27 dB, and −25.93 dB, respectively.
The dependence of directivity function B on the channel spacing analyzed above only covered the case of , and this is because grating lobes will appear when . In time domain signal sampling, a similar phenomenon occurs when the sampling period is larger than the signal period. Therefore, it is important to avoid in the DFOH array.
4. Experiment Verification
Experiments are performed on Qingyang lake using a self-developed DFOH system including a DFOH of 8 m and a DAS system. The DFOH consists of a sensing fiber wrapped uniformly around an elastic cylinder at a wrapping ratio
R of 10. The DAS system employed in the experiment is self-developed, and the details of the system are introduced in [
16]. Probe pulses of 50 ns pulse duration interrogate the DFOH at a rate of 100 kHz. In addition, the sampling rate of the DAS system is
Mbps. Therefore, the minimum channel spacing in fiber length is
m, where
c is the speed of light in vacuum, and
n is the group refractive index. Accordingly, the minimum channel spacing in a DFOH is
m. The channel length is specified in signal processing by the design of gauge length such that
is satisfied. During the experiments, the acoustic signal oscillating at 1000 Hz (corresponding to a wavelength of 1.5 m) is emitted from an acoustic source fixed at a position 5 m beneath the surface of the lake.
Firstly, directivity dependence of a sensing channel on channel length
is experimentally verified. The output of a sensing channel is a time-varying phase
oscillating at 1000 Hz, and the amplitude of
is linearly proportional to directivity function
B1 for a certain
,
θ, and
λ. During signal processing, channel length
is changed, and the amplitude of
as a function of
is presented in
Figure 5. The amplitude for each channel length
in
Figure 5 is the average value of phase amplitudes of ten contiguous channels spaced by
m. The results show that the phase amplitude varies with
in the way of a sinc function. Since the amplitude of
is linearly proportional to
B1, the results in
Figure 5 confirm
B1 as a sinc function of
, which is consistent with Equation (4).
After experimental verification of the directivity of a sensing channel, the dependence of directivity on DFOH structure is experimentally verified. In signal processing,
is selected as 0.2 m. Directivity functions of the DFOH in the case of
= 1, 1.5, and 2 are calculated as the sum of the outputs phase of all the sensing channels and are presented in
Figure 6a. The results in the figure show that as
increases from 1 to 2, the widths of the main lobes decrease from 14.6° to 10.4°. In addition, the height of the side lobes at the same angle
θ decreases as
increases. The conclusions mentioned above are also valid in the cases of
= 0.5, which are confirmed by the calculated results shown in
Figure 6b.
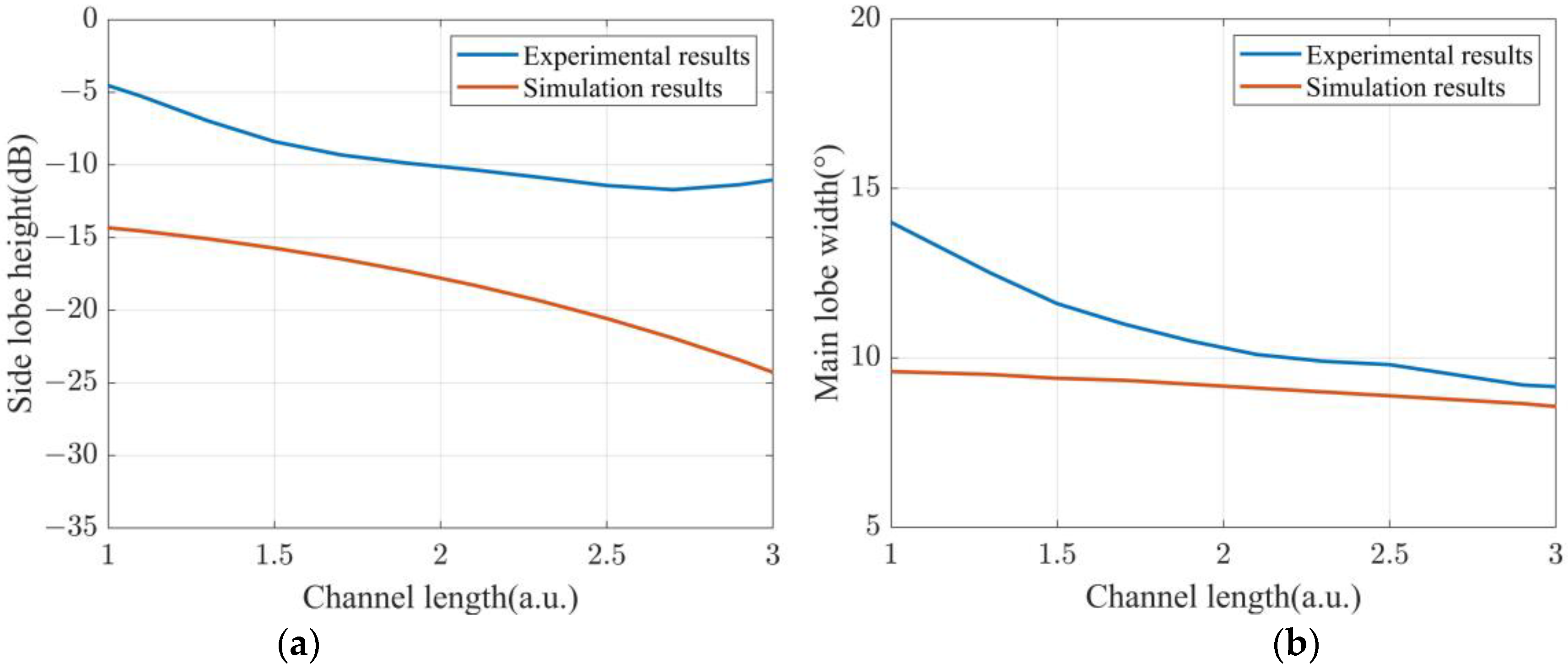
To specifically verify the dependence of directivity function
B on the sensing length, the height of the first-order side lobe and the width of main lobe are calculated using the experimental results in the cases of
increasing from 1 to 3 in the step of 0.2.
Figure 7a presents the calculated side lobe height as a function of
in the case of
= 0.2. Also presented in
Figure 7a are the simulation results of the side lobe height calculated using Equation (4). Both experimental results and simulation results in
Figure 7a show a downtrend. Specifically, as the
increased from 1 to 3, experimental results decrease from −5 dB to −11 dB, and the simulation results are reduced from −14 dB to −24 dB. Due to the noise in the experimental environment, the height of the side lobe obtained in the experiment is higher than that in the simulation.
Figure 7b shows the width of the main lobe obtained both in experiments and in simulations, showing a downtrend as
increases. Specifically, the width of the main lobe in the experiment becomes narrower from 14° to 9.1°, and the width of the main lobe in the simulation decreases from 9.5° to 8.6°. The noise in the experiment causes the width of the main lobe to be larger than that in the simulation.
The effect of channel spacing on the directivity function of a DFOH is also experimentally studied. The array length is set at 8 m, and
is selected as 1.5. Directivity functions of the DFOH in the case of
= 0.2, 0.5, and 0.8 are calculated and are presented in
Figure 8a. The results in the figure show that as
increases from 0.2 to 0.8, the widths of the main lobe decrease from 11.6° to 10.4°. In addition, the heights of the first-order side lobe decrease from −8.39 dB to −9.04 dB. Both the widths of the main lobes and the height of the first-order side lobes change slightly. The conclusions mentioned above are also valid in the cases of
, which are confirmed by the calculated results shown in
Figure 8b.
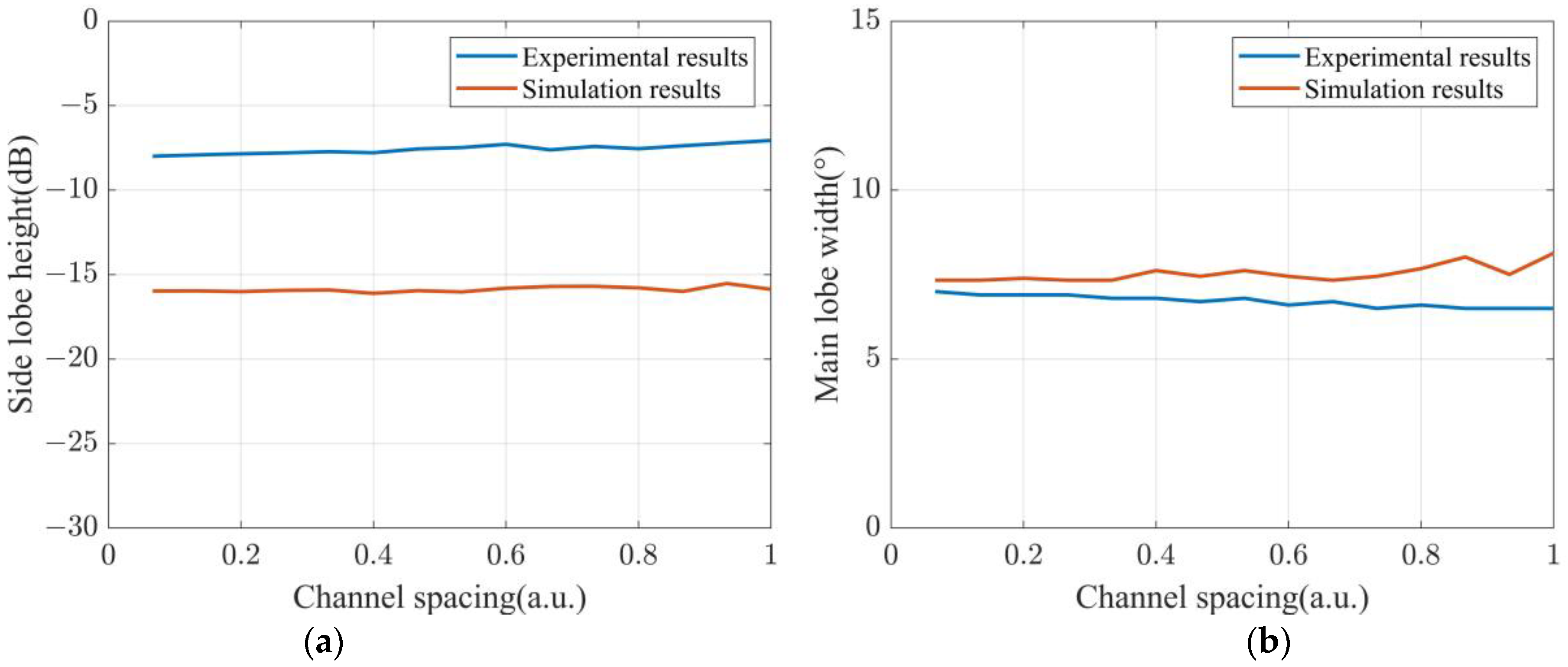
The dependence of directivity function
B on the sensing spacing is specifically verified. The
is set from 0 to 1 in the step of 0.02. The
is selected as 2. The first-order side lobe height and main lobe width are calculated using the experimental results and are presented in
Figure 9. The calculated first-order side lobe height presented in
Figure 9a is stable at about −8 dB, and its maximum value is only 0.94 dB higher than the minimum value.
Figure 9b presents the calculated main lobe width. The main lobe width is stable at around 7°, and the gap between its maximum value and minimum value is 0.5°. Also presented in
Figure 9 are the simulation results of fist-order side lobe height and main lobe width. The simulation results show the same stable trend as the experimental results. However, the noise in the experiment causes different specific values between the simulation results and the experimental results.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}