1. Introduction
The sixth-generation (6G) wireless networks will be a space–air–ground–sea integrated network [
1,
2,
3], where satellite communication plays an important role in providing seamless coverage globally. Especially for internet of things (IoT) networks, which are usually deployed in remote areas or at sea, satellite communication is an indispensable component that can provide service at any time. For example, in the industrial internet of things (IIoT) scenario, IoT terminals usually support a large number of geographically dispersed nodes and are located in harsh environments, such as open seas, dangerous areas, mountains, etc., so it is difficult for the ground network to cover [
4,
5]. Because the satellite communication system has the characteristics of wide coverage and strong survivability, the satellite-assisted IoT (S-IoT) can realize wide area coverage, remote information transmission and acquisition. Therefore, S-IoT networks have received lots of attention recently. Traditional S-IoT focuses on the narrow-band IoT services, but it cannot meet the requirement of the emerging requirements for IoT services, such as high-precision object recognition. Moreover, more and more of the deployed IoT networks will also need to feed the aggregated data back to the control center, and higher system throughput is needed to bear a large amount of IoT data. Unfortunately, the capacity or data transmit rate achieved by a single satellite is usually limited by the high path loss and the scarce resources available on the satellites. In order to achieve a higher data rate, cooperative transmission with multiple satellites has been seen as a feasible method to effectively improve the system throughput.
The multi-satellite cooperative transmission can effectively improve the spectral efficiency and communication rate. A multi-satellites cooperation system composed of two geostationary Earth orbit (GEO) satellites was proposed in [
6,
7]. The satellites adopted zero-forcing (ZF) coding and carried out the power allocation according to the maximization of the data rate under per-antenna power (PAC) constraint, and the cooperative scheme increased the spectral efficiency compared to the conventional techniques. In [
8], the cooperative transmission strategy of the GEO satellite colocation (GEOSC) system was studied. The multipath component and the line-of-sight (LOS) component in the Rician channel were comprehensively considered to improve the transmission rate of the system through the user selection strategy and opportunistic beamforming. In [
9], the cooperative transmission strategy for the multi-satellite colocation (MSC) system was proposed, which adopted the cooperative beamforming and constructed an orthogonal channel by geometric criterion. The communication rate was better than the two-satellite GEOSC system. A full frequency reuse-based dual-satellite system was studied in [
10] to achieve a high data transmission rate by designing a relay-aided decision support system. In recent years, with the development of LEO satellite techniques, the cooperative techniques between GEO and LEO satellites have attracted attention. The multi-satellites relay systems based on time division multiple access (TDMA) and non-orthogonal multiple access (NOMA) were introduced in [
11]. In [
12,
13], spectrum sharing and cooperative technology were considered in the LEO-GEO co-existing systems, which can solve the interference issue between different satellites. In addition, a cooperative LEO satellites system was studied in [
14,
15]. In [
14], the effect of different antenna distributions with multiple antenna terminals in a dual-LEO-satellite system was analyzed. In [
15], the ultra-dense LEO satellite constellation networks were considered, and the algorithm based on the max–min fairness criterion and analog beamforming was proposed to improve the system capacity.
Due to large path loss, power control is especially important in satellite systems. In [
16], the application of Q-learning for power control was investigated in the satellite communication system, and the proposed method effectively extended the service life of the satellite battery. Considering the distributed power control problem in downlink cognitive satellite–terrestrial networks, a static non-cooperative game model was proposed in [
17] to improve the resource utilization efficiency and reduce interference. The authors in [
18] studied the LEO satellite constellation model under the dynamic characteristics of an LEO satellite. Aiming to limit the maximum delay and minimize the outage probability, two optimal power control schemes were proposed. In order to improve the performance of the uplink random access, a power control scheme based on spatial grouping was proposed in [
19], which effectively reduced the energy consumption of satellite IoT terminals. In [
20], the pilot-based channel estimation and back-off interference power constraint were employed for the satellite link and the terrestrial interference link, respectively, and the proposed method can alleviate the impact of imperfect channel station information.
However, the above research works related to cooperative satellite systems did not consider the large frequency offset caused by LEO satellites. In the LEO satellite system, the synchronization performance is seriously affected by the large frequency shift caused by the high-speed movement of the LEO satellites. How to carry out accurate synchronization under a large frequency shift is an important problem. There have been plenty of research works on the subject of synchronization for the terrestrial communications system. Low-complexity synchronization schemes were proposed in [
21,
22] by using the autocorrelation of primary synchronization signals (PSS) for a 5G system. These works reduced the complexity by sacrificing the SNR performance or processing delay. The work in [
23] exploited the periodicity and the sparsity of the channel to improve the estimated performance of the channel impulse response (CIR) and of the carrier frequency offset (CFO). Most of the above research works are aimed at reducing the complexity, and they are not applicable to the high mobility of LEO satellites. In an LEO satellite system, the large frequency offset seriously affects the system performance. To achieve fine timing synchronization, a low-complexity algorithm using the Zadoff–Chu (ZC) sequence is proposed in [
24]. The work in [
25] proposed a robustness timing advance estimation method by a novel random-access preamble sequence, which consists of the real and imaginary part of a ZC sequence. The time and frequency synchronization methods in the downlink LEO satellite system were investigated in [
26]. The PSS and cyclic prefix (CP) were used to improve the estimation performance. In order to adapt to 5G, the synchronization methods suitable for LEO satellite single-path and multipath fading channels were proposed in [
27] for an OFDM-based satellite system, which utilizes the ZC sequence and the feature of the satellite channel. In addition, several methods estimated the frequency offset without training sequences. In [
28], the author presented a turbo-code-aided Doppler frequency shift correction algorithm by means of the Gaussian process model for high-mobility satellite communication without a training sequence.
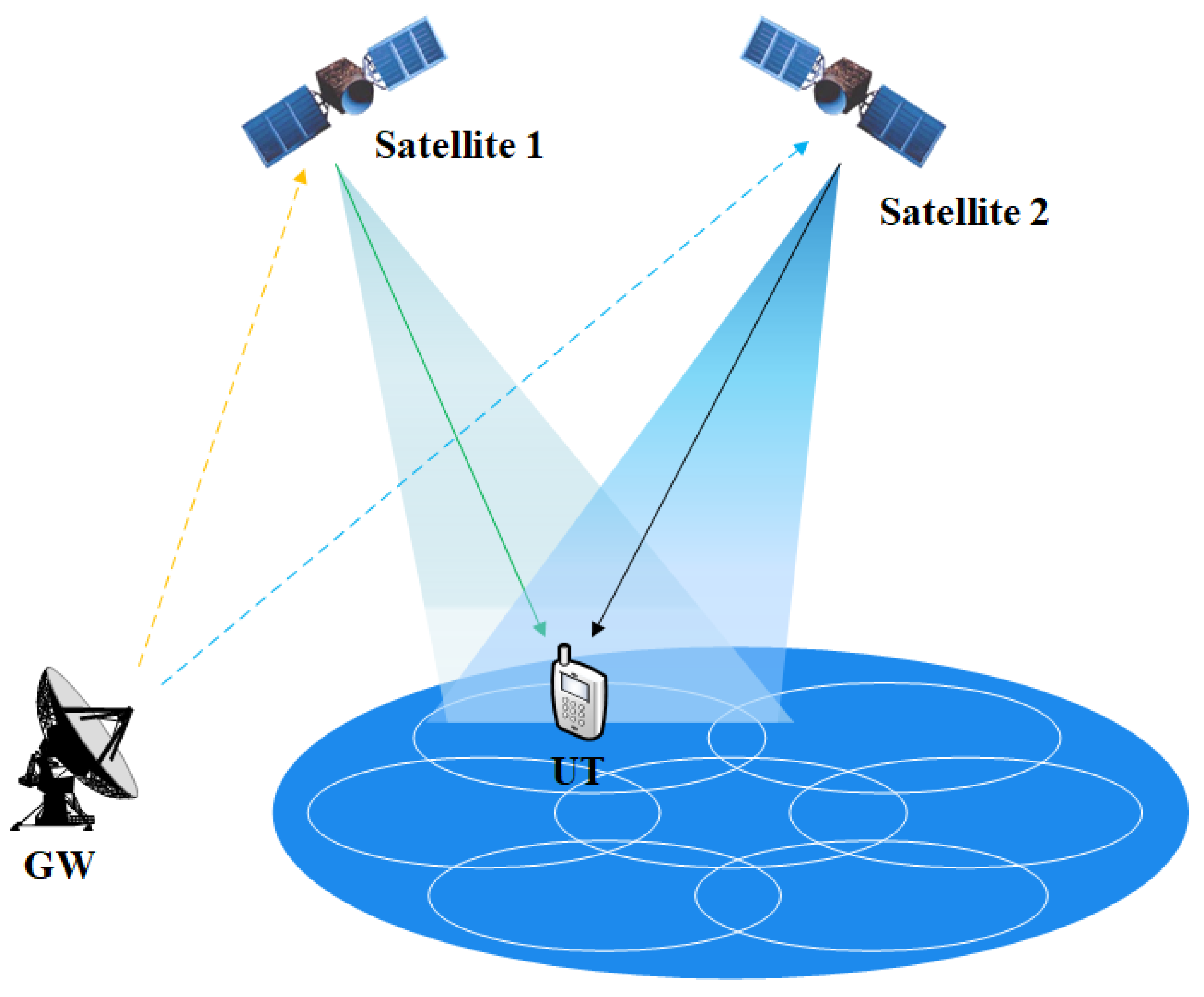
In this paper, we model the downlink transmission of a dual-LEO-satellite communication system and analyze the impact of the dynamic characteristics of an LEO satellite. In addition, we propose a power control algorithm and a synchronization algorithm under this system to combat the influence of the path loss and frequency offset of the LEO satellite system. It is assumed that the data transmitted by the two satellites are different, and the terminal has the function of joint receiving and processing of the dual-stream data, as shown in
Figure 1. A power control scheme is proposed to solve the path loss effect. In order to resist the large frequency shift of the LEO satellites, the two-dimensional search algorithm is adopted. The PSS sequence is used for the time synchronization and coarse frequency offset estimation, and the PSS and secondary synchronization signal (SSS) sequences are combined for the fine frequency offset estimation to improve the synchronization performance. The simulation results show that the proposed schemes can not only ensure a high communication rate but also reduce the power loss. The proposed scheme can achieve more than a 1 Gbps data rate for a single user.
2. System Model
2.1. Dual-LEO-Satellite System Model
Considering the cooperative transmission of dual-satellite communication system, there are two satellites that transmit data to the single IoT user terminal (UT). Each satellite is equipped with a planer antenna array containing antenna elements. The user terminal is equipped with two reflector antennas. The signals received by terminal’s antenna 1 and antenna 2 at a certain time can be expressed as
where
and
are the antenna gain of satellite 1 and satellite 2.
and
are the antenna gain of the terminal’s antenna 1 and terminal’s antenna 2, respectively.
,
,
,
represent the channel response.
,
denote analog beamforming weighting vectors of satellite 1 and satellite 2.
,
denote the transmit signal of satellite 1 and satellite 2.
,
represent the additive noise of the terminal’s antenna 1 and antenna 2.
,
denote the receive signal of antenna 1 and antenna 2, respectively. Note that
in (1) denotes signal from satellite 1 received by antenna 1, and
represents the signal from satellite 2 received by antenna 1.
denotes signal from satellite 2 received by antenna 2, and
represents the signal from satellite 1 received by antenna 2.
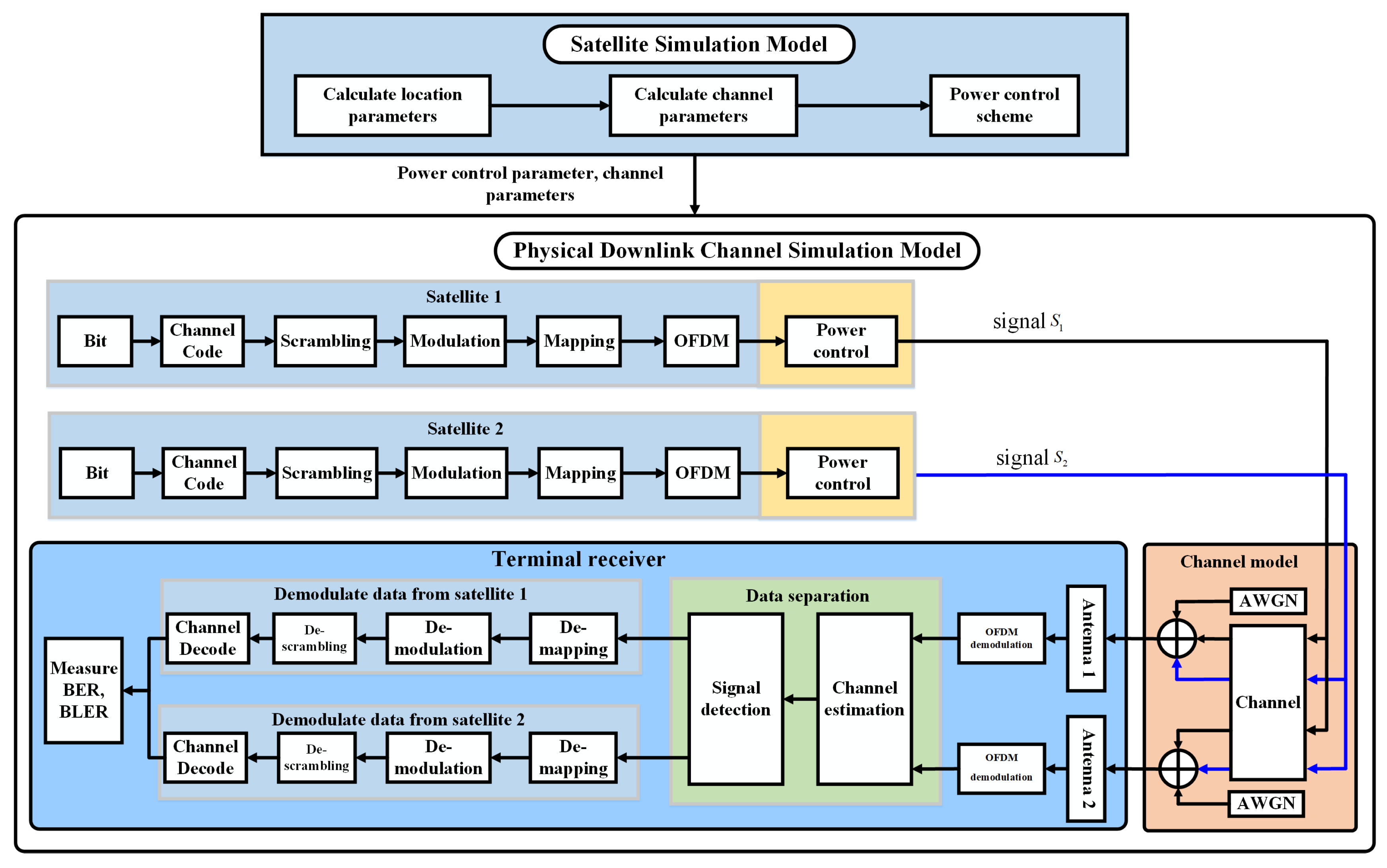
To evaluate the performance of the dual-stream transmission with two LEO satellites, we set up a simulation platform. As shown in
Figure 2, the system simulation model mainly includes two parts: the satellite simulation model and the downlink physical channel simulation model. The satellite simulation model includes satellite orbit model and power control module. The satellite orbit model mainly models the satellite orbit according to the satellite simulation parameters and obtains the position parameters of two satellites at any time. Then, calculate the relative position of ground users and satellites. The power control module mainly realizes power optimization by controlling power parameters. Downlink physical channel simulation includes signal transmitters, channel, signal receiver, bit error rate(BER) statistics and other modules to verify the system performance.
Satellite model simulation can be divided into three parts. First, according to the six orbital elements of satellite, simulate the satellite orbit, which can calculate the location parameters, such as the distance between the satellite and the user, the angle of arrival and angle of elevation. Second, calculate the parameters required by the channel model through the position parameters. Third, the power optimization scheme is adopted to adjust the power control parameters. Finally, the channel model parameters and power control parameters are output to the physical downlink channel simulation model.
The physical downlink channel simulation model process is shown in
Figure 2, which consists of transmitters, channel model and receiver. At the transmitter, two satellites send two different data streams. The receiver demodulates the data separately by two receiving antennas. Set the user’s two receiving antennas as antenna 1 and antenna 2. Assuming at the receiver, antenna 1 expects to receive the transmitted data from satellite 1, antenna 2 expects to receive the transmitted data from satellite 2. Satellite 1 and satellite 2 generate different data followed by encoding, scrambling, modulation and power control at the transmitter. At the receiver, the received signals from antenna 1 and antenna 2 are forwarded to the OFDM demodulation module. The data separation scheme is realized by channel estimation and signal detection. The linear-minimum-mean-square-error (LMMSE) estimation algorithm is used for channel estimation [
29]. The signal detection scheme in this paper adopts the maximum likelihood (ML) method, and the ML detector can be expressed as [
30]
Splitting the received OFDM block into G sub-blocks, where denotes the g-th sub-block of the received OFDM signal. represents the modulation symbol of the g-th sub block transmitted by the t-th satellite. denotes the received signal of the g-th sub-block received by the r-th receiving antenna. represents the estimated channel response vector. represent the estimated modulation symbols transmitted by satellite 1 and satellite 2, respectively. After that, the transmission symbols of satellite 1 and satellite 2 are demodulated and decoded, respectively. Finally, the communication rate of the system can be calculated by counting BER and bit block error rate (BLER).
2.2. Frame Structure
The frame structure adopts the 5G frame structure based on the 3GPP specifications [
31]. The frame length is 10 ms, which consists of ten subframes of 1 ms duration. Each subframe contains
OFDM symbols, where
denotes number of OFDM symbols per slot.
represents the number of slots contained in each subframe.
represents the subcarrier spacing configuration. In the frequency domain, a resource block contains 12 consecutive subcarriers. The subcarrier spacing can be represented as
[kHz].
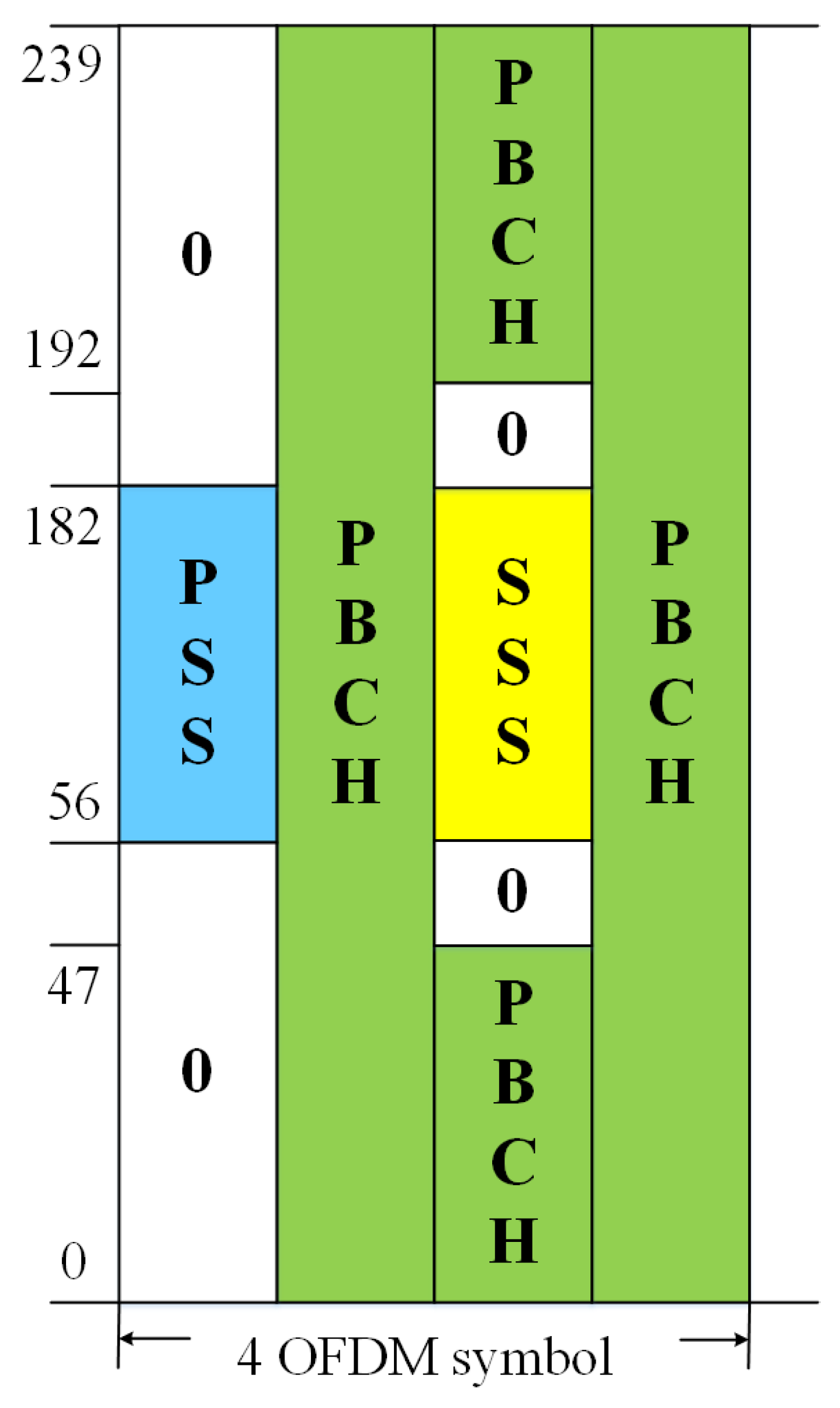
2.3. Synchronization Sequence
The synchronization scheme adopts the PSS and SSS. The PSS and SSS are located on SS/PBCH Block (SSB). The structure of SSB is shown in
Figure 3. PSS and SSS occupy 127 subcarriers in frequency domain subcarriers in the frequency domain. The PSS sequence is defined by
The SSS sequence is defined by
where
,
represents the physical-layer cell identities.
2.4. Channel Models
In this section, we model the LEO satellite downlink channel [
32].
denotes the channel of satellite
l and antenna
k, which can be represented as
where
represents the LOS part and
is the none-line-of-sight (NLOS) part of the channel. They can be expressed as
where
denotes the Rician factor.
,
denote the normalized Doppler shift of the LOS and NLOS, respectively.
represents the subcarrier spacing.
N denotes the Fourier transform points.
is the carrier frequency.
and
represent the propagation delay of the LOS and NLOS.
denotes the number of channel propagation paths of NLOS.
denote the array response array. As the satellite is very high relative to the terrestrial terminal, the array response
, which can be expressed as
where
denotes the wavelength,
represents the element space of the antenna array.
M represents the number of antenna elements.
,
denote the number of antenna elements along
x axis and
y axis, respectively.
Doppler frequency shift includes the frequency shift brought by satellite and terrestrial terminals. Assuming that the IoT UT is not moving, the frequency shift
. According to [
33], the frequency shift of different paths can be assumed the same values,
. Because the distance between the two receiving antennas of the IoT terminal is far less than the height of the satellite, the frequency shift caused by the same satellite to the two antennas of the IoT terminal can be regarded as the same value,
. Therefore, Formulas (
9) and (
10) can be rewritten as
4. Results
In this section, we will evaluate the proposed scheme via a simulation. The satellite orbit height of the OneWeb system is 1200 km, each orbit plane contains 40 satellites, the included angle between each satellite is 9° and the orbit inclination of the OneWeb, SpaceX and Telesat is between 37.4° and 87.9° [
34]. When the orbit height becomes higher, the frequency offset brought by the satellite will be reduced, which is conducive to reducing the adverse impact of the frequency offset on the system. Therefore, we consider the height of the LEO satellites as 1200 km. The satellite orbit inclination is 86.4°. The two satellites are located on the same orbital plane with an included angle of 9°. The time period for each satellite that can connect with the IoT UT is 16 min. The terminal antenna adopts the reflector antenna defined in [
35]. The normalized antenna radiation pattern can be expressed as
where
denotes the first kind of first-order Bessel function,
a is the radius of the circular hole of the antenna,
represents the wave number,
f is the central frequency of the system and
c denotes the speed of light in vacuum.
represents the angle measured from the bore sight of the antenna’s main beam.
Table 1 shows the link parameters of the system. A Rician channel is adopted, and the Rician factor is 13.3 dB.
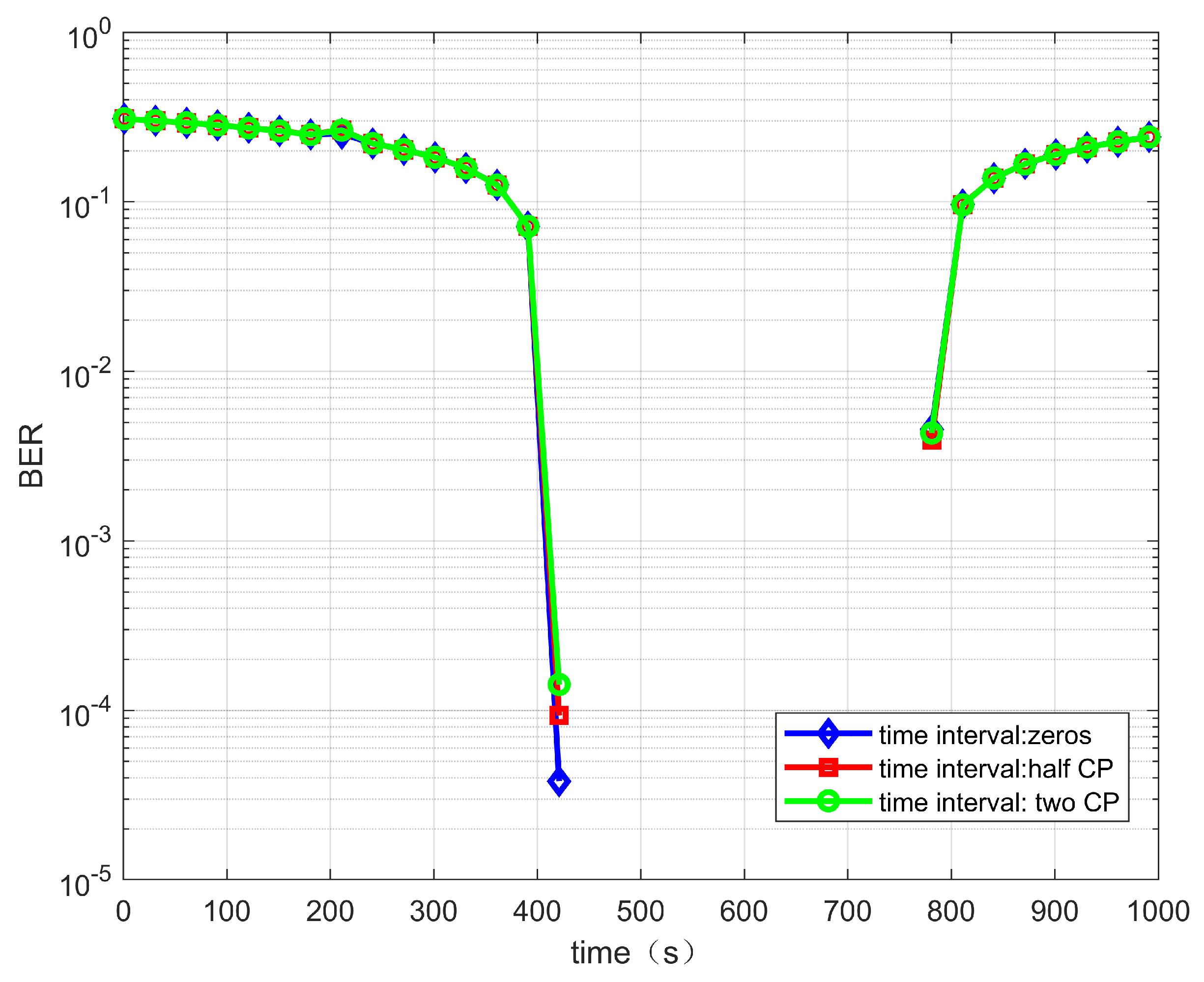
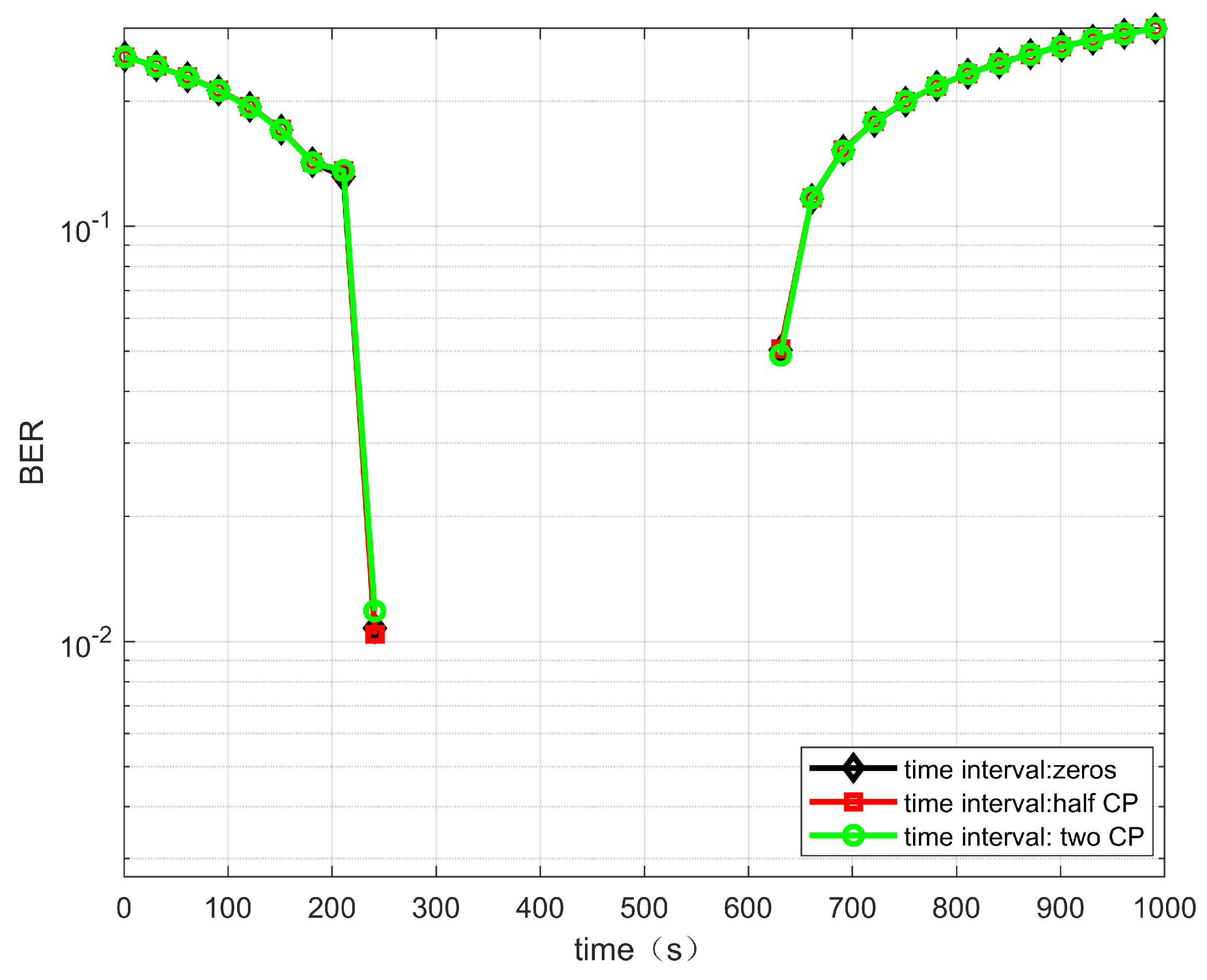
When the transmitted signals from two satellites do not arrive at the terminal at the same time, the transmitted signals from different satellites will cause interference and affect the demodulation performance. In the case of an ideal frequency offset compensation, the BER performance of the dual-stream signals arriving at the terminal with different time intervals is analyzed.
Figure 6 and
Figure 7 show the case of no time interval, a half CP time interval and two CP time intervals. When the reflector antenna is used, the mutual interference between the two satellites of the signals is small. Thus, different time intervals have little effect on the demodulation performance of the system.
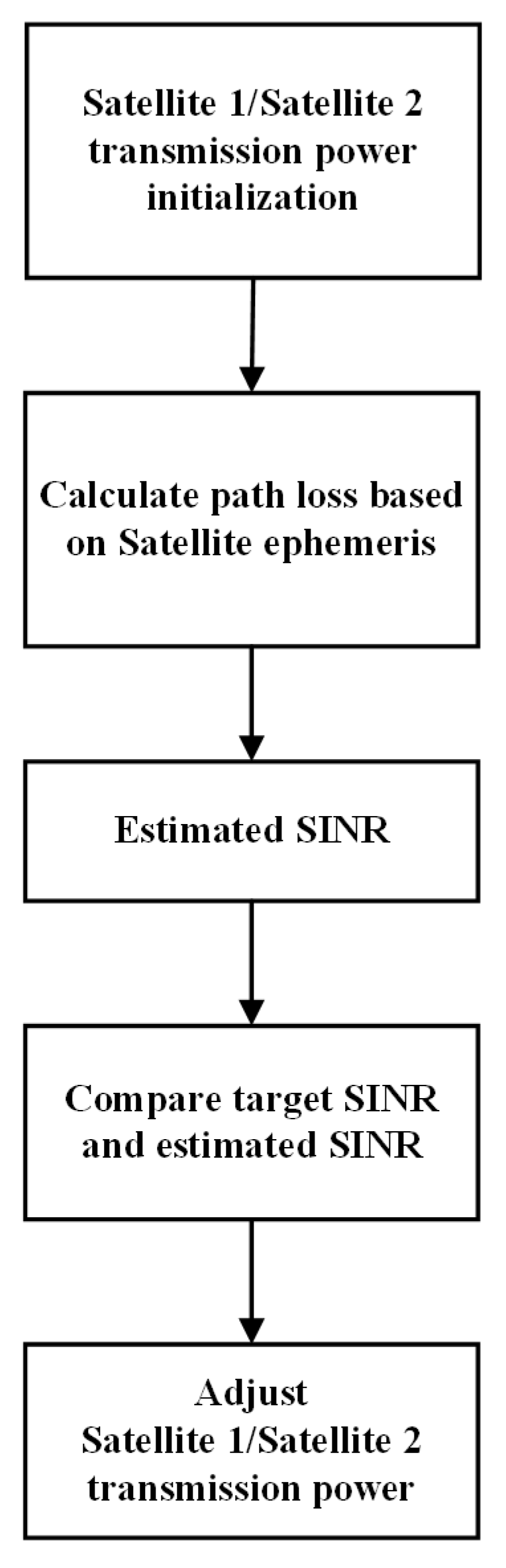
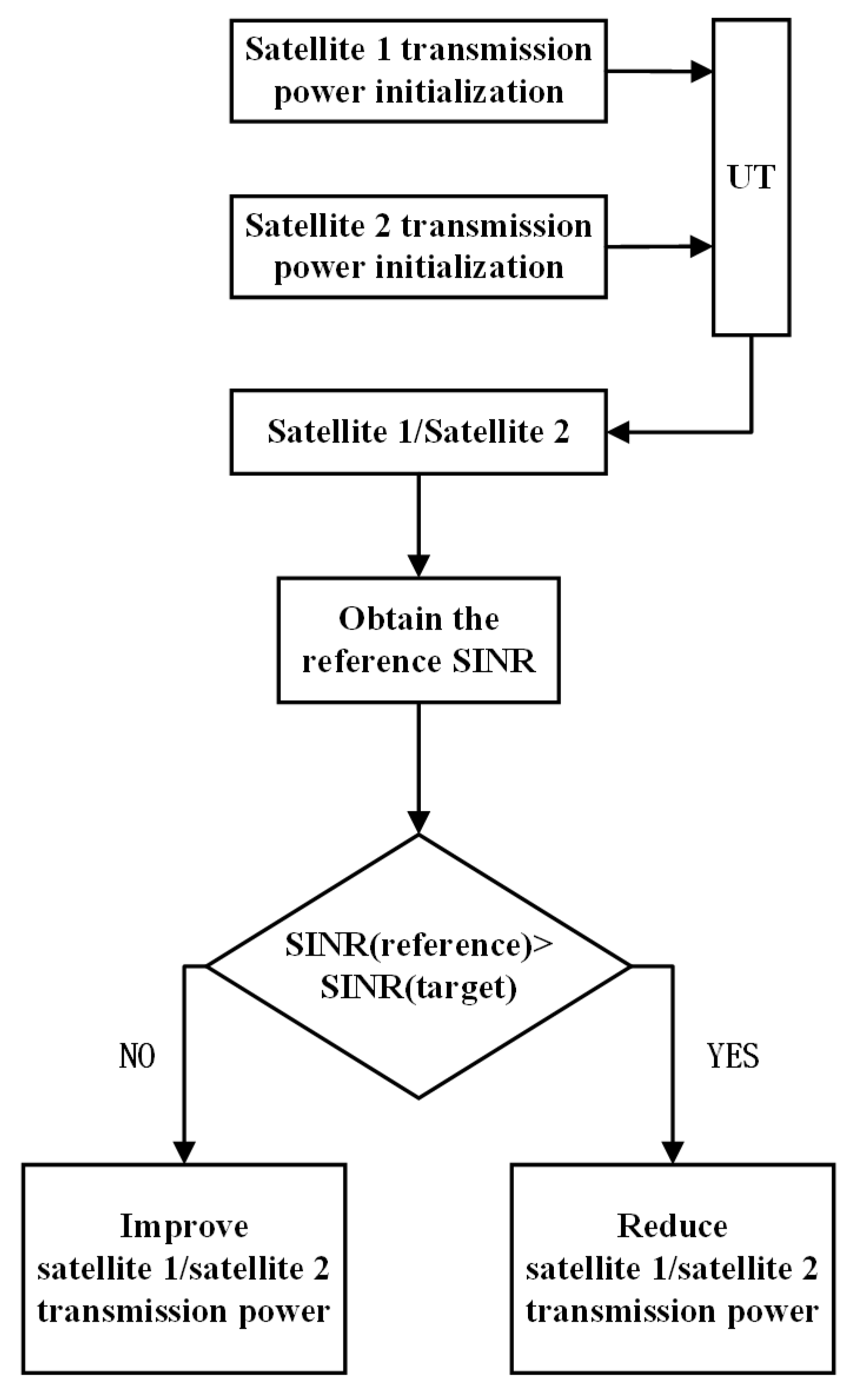
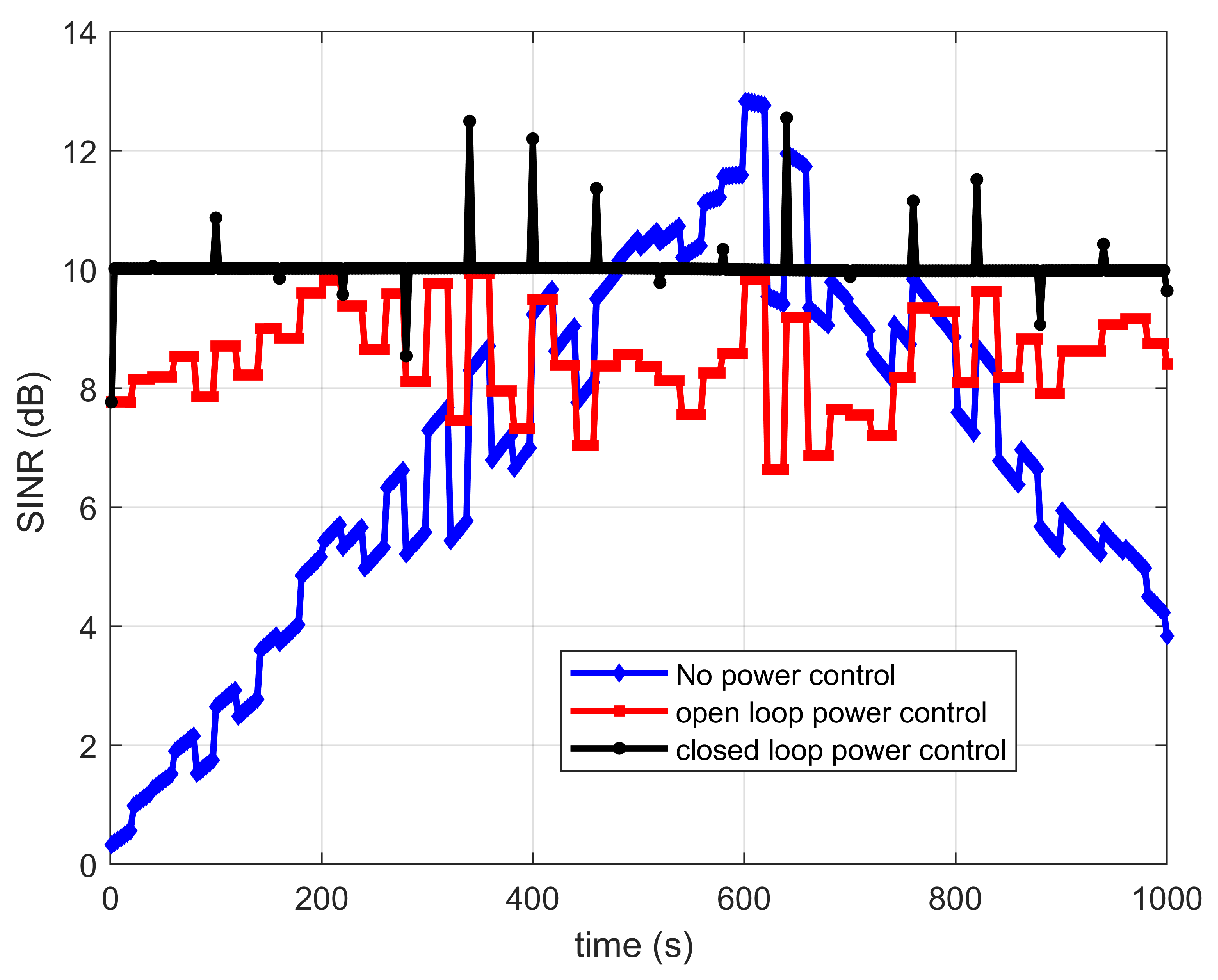
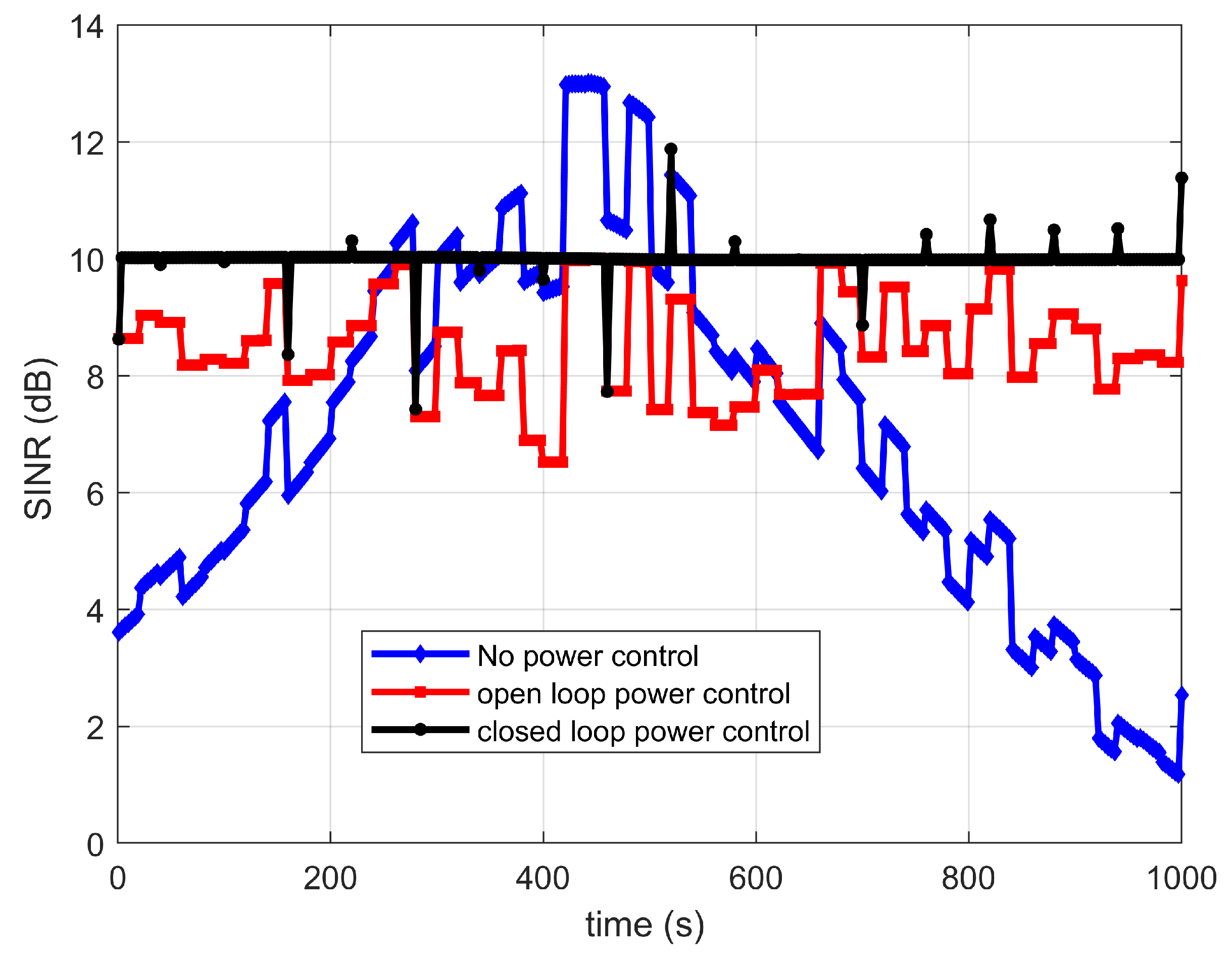
In order to verify the power control performance of different power control schemes, the dual transmission with no power control, open-loop power control and closed-loop power control are investigated. The shadow fading is considered for suburban and rural scenarios, and the variance value is given by [
33]. The target SINR is set to 7 dB. The power adjustment cycle is set to 1 s. Perfect synchronization is assumed.
Figure 8 and
Figure 9 show the SINR versus time curve under different power control schemes. Compared with the no power control scheme, the SINR with power control schemes are more stable. In addition, the closed-loop power control scheme is more stable than the open-loop power control. However, the closed-loop power control scheme needs the feedback information from the terminal, and it will increase the system complexity. Thus, in the following analysis, the open-loop power control scheme is assumed to be adopted.
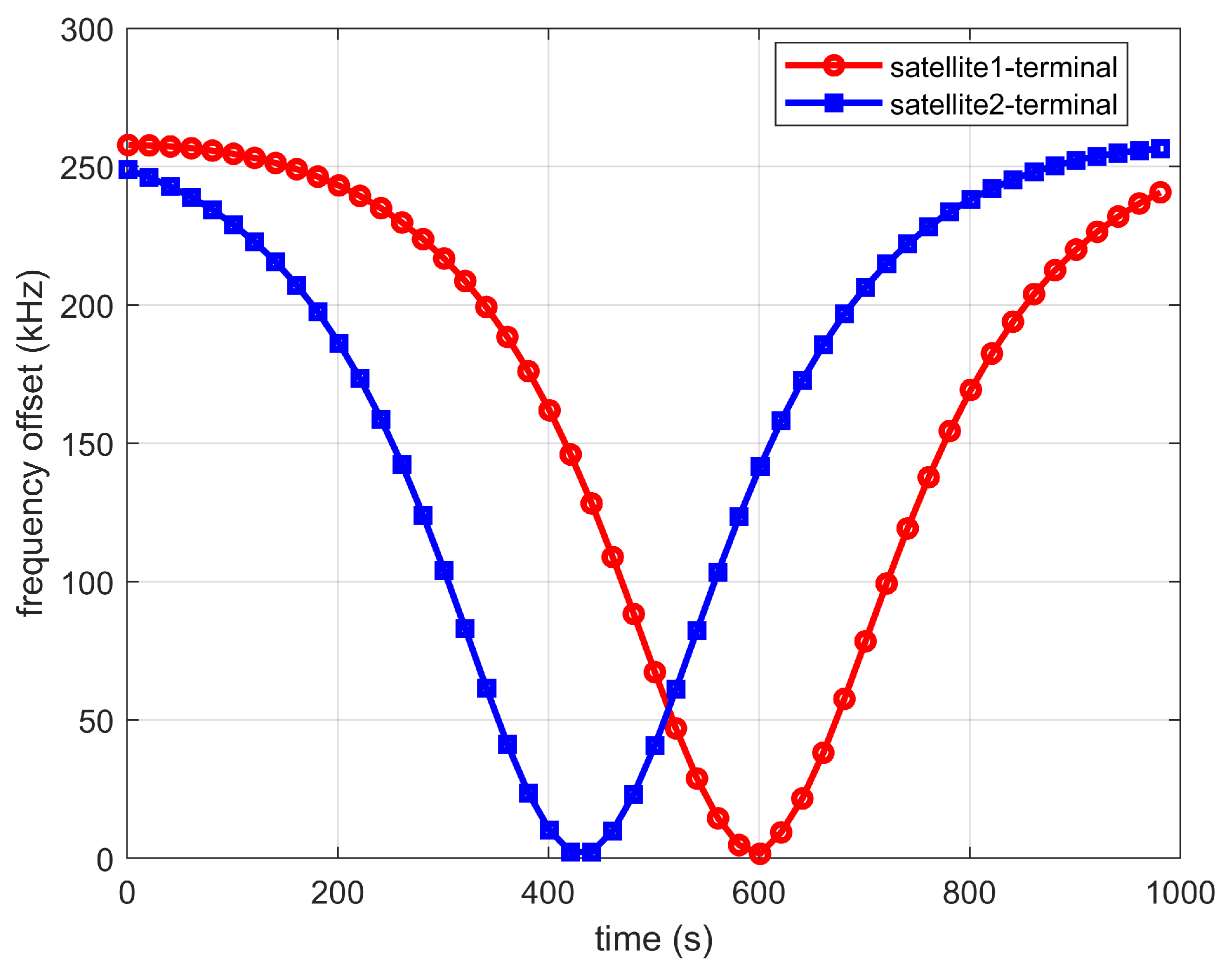
Figure 10 shows the dynamic characteristic of the frequency offset experienced by the two satellites. It can be seen that the frequency offset caused by the satellites is different. At the receiver of the IoT terminal, the frequency offset caused by different satellites should be compensated individually.
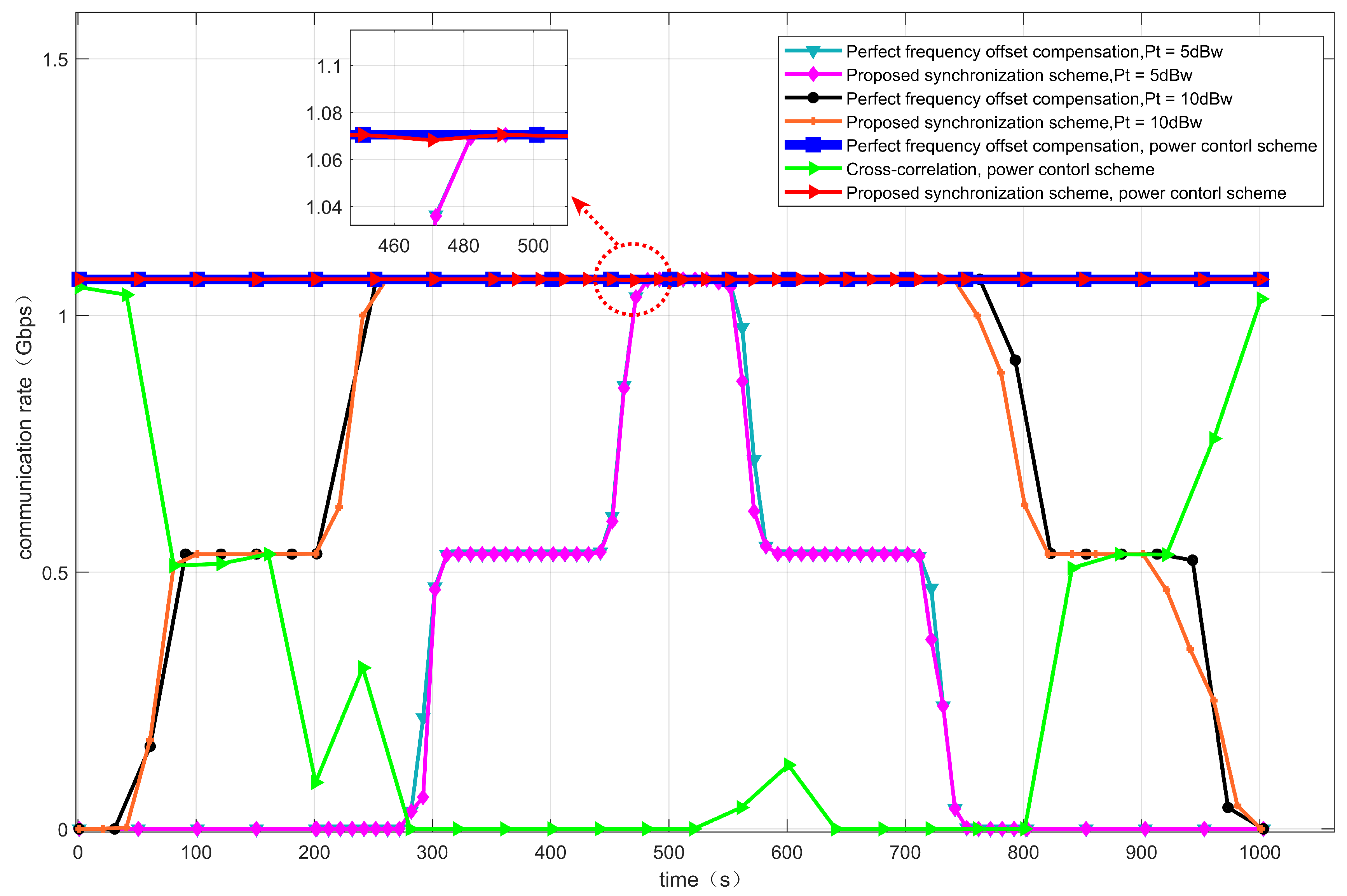
Figure 11 shows the comparison of the terminal communication rate under a perfect frequency offset compensation and the proposed synchronization schemes. Moreover, the effects of the power control scheme are also investigated with the proposed synchronization scheme. When the transmission power is 5 dbw, the communication rate can hardly be maintained above 1 Gbps. When the transmission power increases to 10 dbw, the communication rate can be maintained above 1 Gbps for about ten minutes. When adopting the power control scheme, the transmit power of two satellites will change according to the adopted power control scheme, and the SNR can maintain a relatively stable range. Thus, the communication rate can be maintained above 1 Gbps all the time. We compare the cross-correlation algorithm in [
36] with the method in this paper, as shown in
Figure 11.The simulation results show that under the SINR, modulation and coding rate, the cross-correlation algorithm has poor performance in the frequency offset estimation and compensation, so the communication rate is low. Compared with the perfect frequency offset compensation, the simulation results show that under the proposed synchronization scheme, the communication rate will fluctuate slightly, as shown in the enlarged part of the red circle in
Figure 11, which is caused by the frequency offset estimation error. The overall communication rate can still be maintained above 1 Gbps.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}