
In-Flight Alignment of Integrated SINS/GPS/Polarization/Geomagnetic Navigation System Based on Federal UKF

Abstract
:1. Introduction
2. The Error Model of Integrated Navigation System
2.1. Nonlinear Model of SINS
2.2. Measurement Equation of SINS/GPS
2.3. Measurement Equation of SINS/Polarization
2.4. Measurement Equation of SINS/Geomagnetic
3. Federal Unscented Kalman Filter
- 1.
- Update Each Local System and Master Filter
- Set sigma points and weightswhere is used to adjust the sigma points distribution around . is the mean and covariance weights of the state vector. To prevent the occurrence of negative determinations of the one-step prediction estimation error covariance, the singular value decomposition (SVD) method is adopted to calculate the square root of .andwhere is the column of . is the singular value of .
- Time updateThe one-step predicted value of the state vector is described as:The one-step prediction mean square error is represented as:The one-step prediction of the measured value is denoted as:
- Measurement updateEstimated mean squared deviation equation for the measured value is expressed as:The state estimation of the master filter is described as:The state estimations covariance of the master filter is denoted as:For three local filters, the filter gains and state updating are computed as
- 2.
- Global FusionThe global fusion process only fuses the common states . Since the local filter of the SINS/GPS is a 15-dimensional state, and must do the corresponding dimensional transformation before data fusion. Among them, only the attitude error angles and gyroscope drift in the estimations of are fused. The transformed symbols are written as and , respectively.The state of the global fusion isThe covariance of the global fusion is
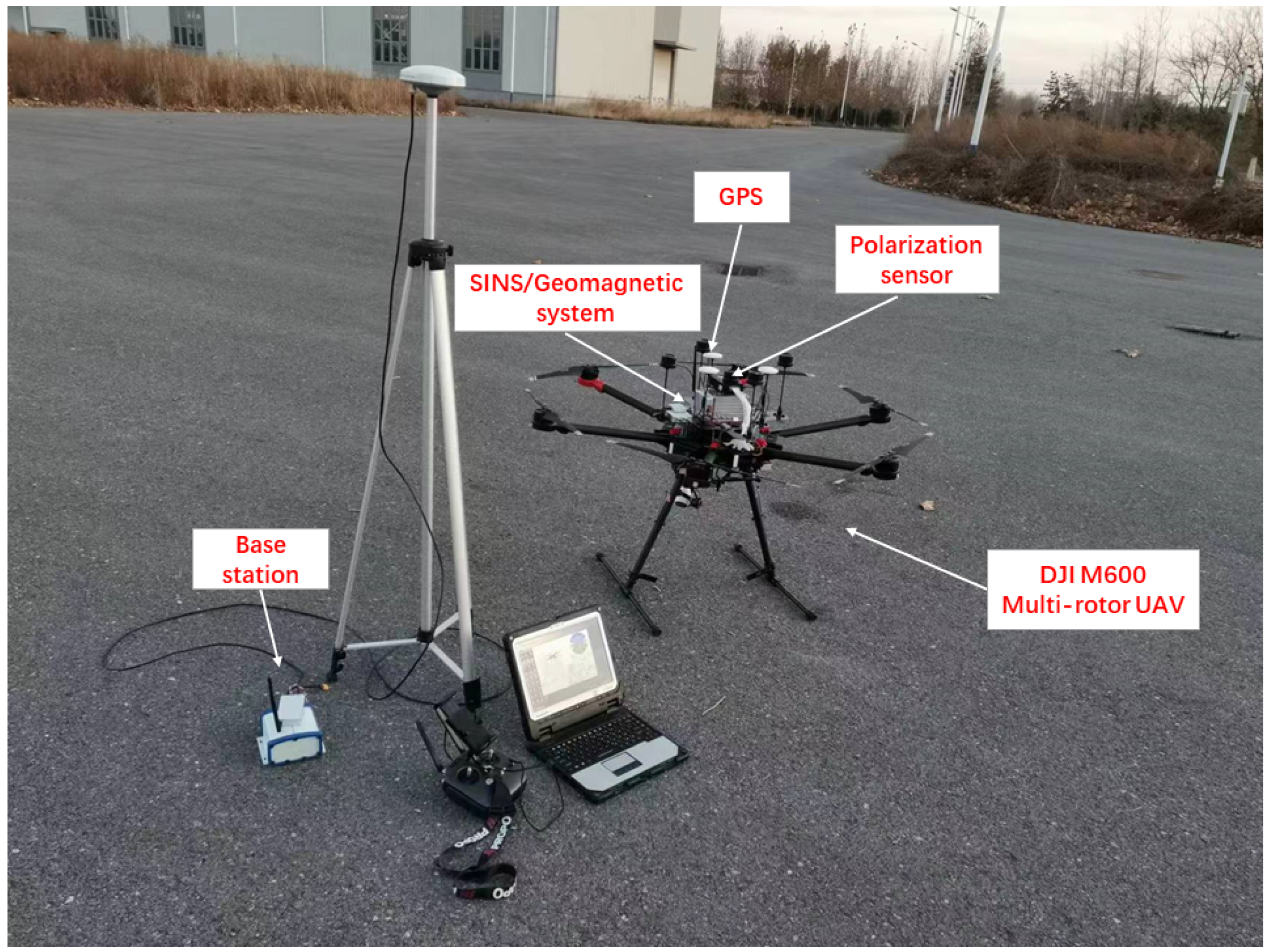
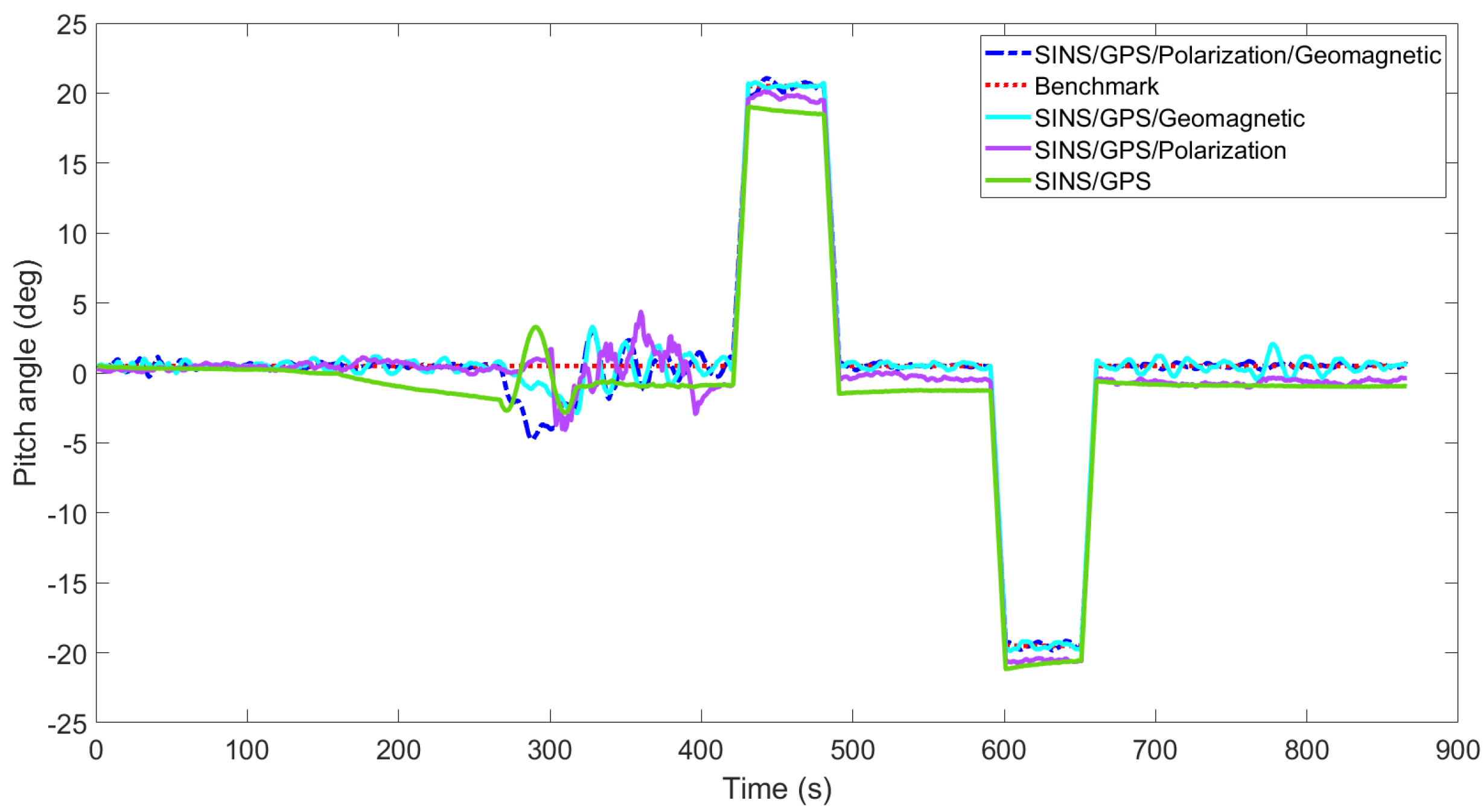
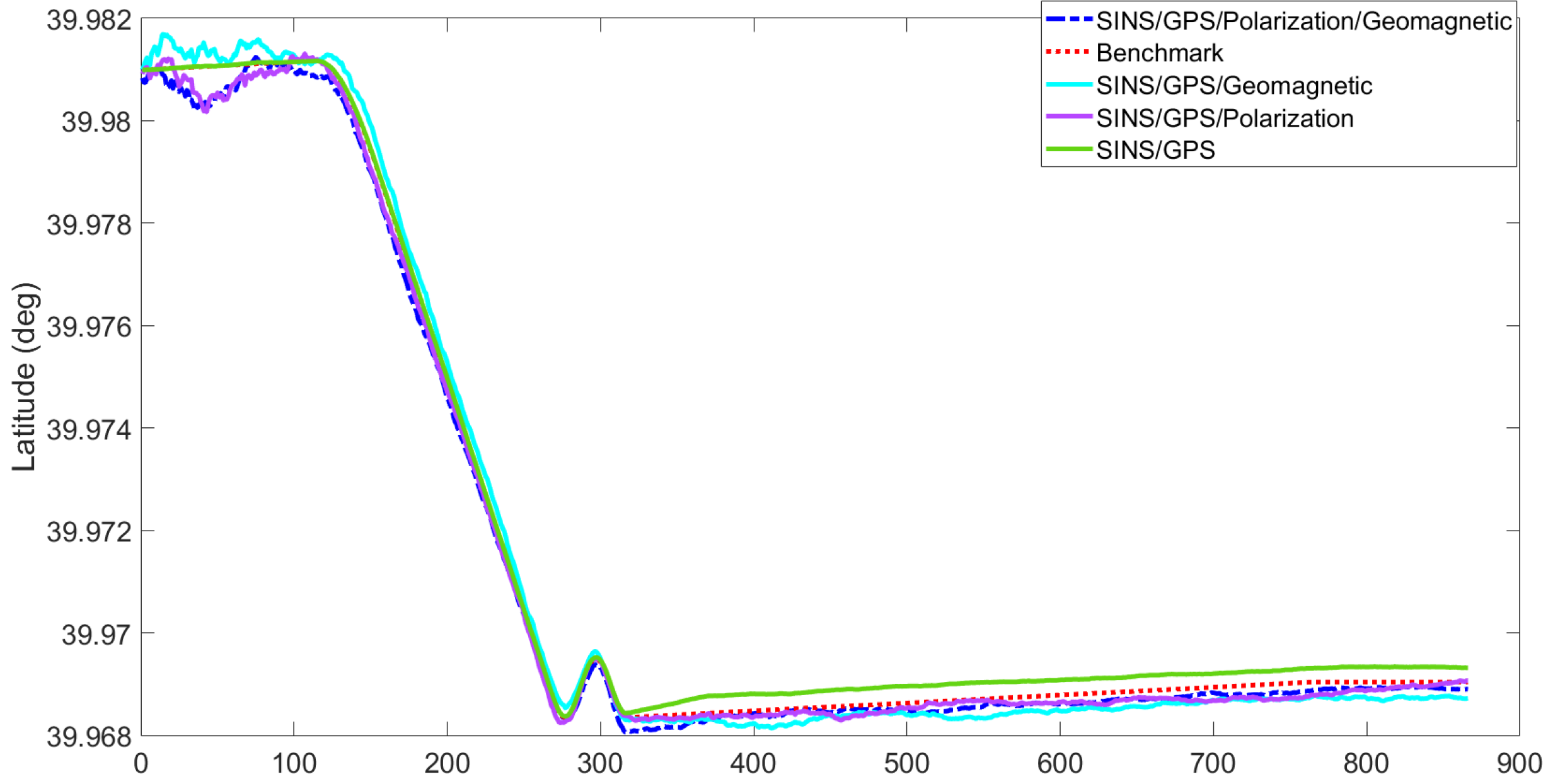
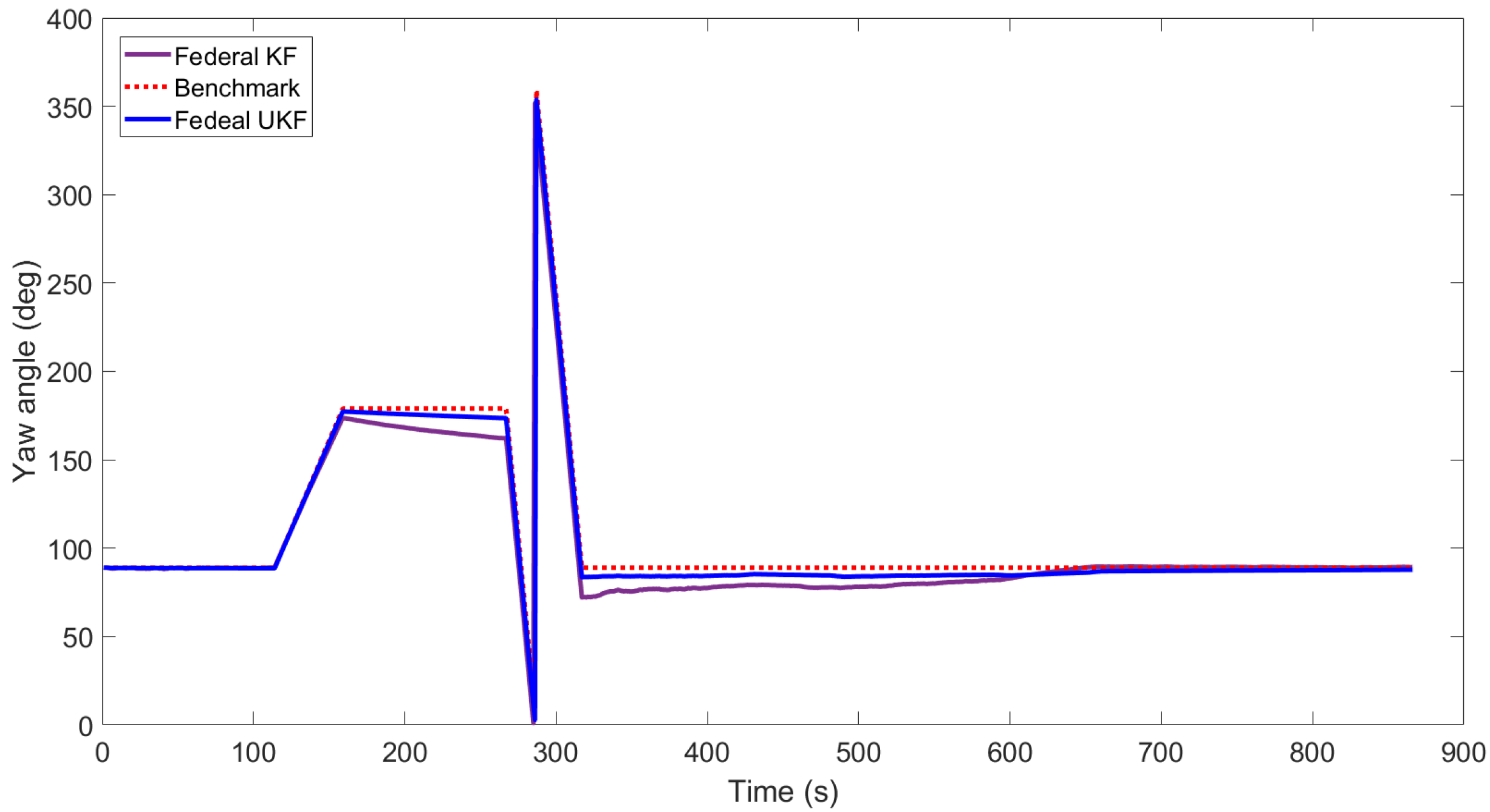
4. Experimental Results and Analysis
5. Conclusions
- Firstly, the SINS/Geomagnetic subsystem is constructed to improve the estimation accuracy of horizontal attitude angles.
- Secondly, aiming at the problem that the heading angle calculated by geomagnetic information is inaccurate in a moving base, the polarization sensor is used to improve the estimation accuracy of heading angle.
- Thirdly, a federal unscented Kalman filter with reset-free structure is proposed for the in-flight alignment problem of the integrated SINS/GPS/Polarization/Geomagnetic navigation system. In the local filter, the unscented Kalman filter is used to estimate the state of each subsystem. In the master filter, attitude angles and gyro drift of geomagnetic and polarization subsystems are estimated to improve the filtering accuracy with low computational burden.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chang, L.B.; Qin, F.J.; Wu, M.P. Gravity Disturbance Compensation for Inertial Navigation System. IEEE Trans. Instrum. Meas. 2018, 68, 3751–3765. [Google Scholar] [CrossRef]
- Han, S.L.; Ren, X.Y.; Lu, J.Z.; Dong, J. An Orientation Navigation Approach Based on INS and Odometer Integration for Underground Unmanned Excavating Machine. IEEE Trans. Veh. Technol. 2020, 69, 10772–10786. [Google Scholar] [CrossRef]
- Guo, L.; Cao, S.Y.; Qi, C.T.; Gao, X.Y. Initial Alignment for Nonlinear Inertial Navigation Systems with Multiple Disturbances Based on Enhanced Anti-Disturbance Filtering. Int. J. Control 2012, 85, 491–501. [Google Scholar] [CrossRef]
- Cao, S.Y.; Guo, L. Multi-Objective Robust Initial Alignment Algorithm for Inertial Navigation System with Multiple Disturbances. Aerosp. Sci. Technol. 2012, 21, 1–6. [Google Scholar] [CrossRef]
- Cao, S.Y.; Guo, L.; Chen, W.H. Anti-Disturbance Fault Tolerant Initial Alignment for Inertial Navigation System Subjected to Multiple Disturbances. Aerosp. Sci. Technol. 2018, 72, 95–103. [Google Scholar] [CrossRef] [Green Version]
- Rhee, I.; Abdel-Hafez, M.F.; Speyer, J.L. Observability of an Integrated GPS/INS during Maneuvers. IEEE Trans. Aerosp. Electr. Syst. 2004, 40, 526–535. [Google Scholar] [CrossRef]
- Yao, Y.Q.; Xu, X.; Zhang, T.; Hu, G.G. An Improved Initial Alignment Method for SINS/GPS Integration with Vectors Subtraction. IEEE Sens. J. 2021, 21, 18256–18262. [Google Scholar] [CrossRef]
- Wei, X.; Li, J.; Feng, K.; Zhang, D. An Improved In-flight Alignment Method Based on Backtracking Navigation for GPS-Aided Low Cost SINS with Short Endurance. IEEE Robot. Autom. Let. 2022, 7, 634–641. [Google Scholar] [CrossRef]
- Zhong, M.Y.; Guo, J.; Zhou, D.H. Adaptive In-Flight Alignment of INS/GPS Systems for Aerial Mapping. IEEE Trans. Aerosp. Electr. Syst. 2018, 54, 1184–1196. [Google Scholar] [CrossRef]
- Wu, Y.X.; Pan, X.F. Velocity/Position Integration Formula Part I: Application to In-Flight Coarse Alignment. IEEE Trans. Aerosp. Electr. Syst. 2013, 49, 1006–1023. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.L.; Zhang, Z.; Du, S.Y.; Li, Y.F.; Zhang, Y.G. A high-accuracy GPS-aided coarse alignment method for MEMS-based SINS. IEEE Trans. Instrum. Meas. 2020, 69, 7914–7932. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. Self-Contained Indoor Pedestrian Navigation Using Smartphone Sensors and Magnetic Features. IEEE Sens. J. 2016, 16, 7173–7182. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Q.; Pan, M.C.; Chen, D.X.; Wan, C.B.; Wu, F.H.; Liu, Y. A New Geomagnetic Matching Navigation Method Based on Multidimensional Vector Elements of Earth’s Magnetic Field. IEEE Geosci. Remote Sens. 2018, 15, 1289–1293. [Google Scholar] [CrossRef]
- Huang, G.; Taylor, B.K.; Akopian, D. A Low-Cost Approach of Magnetic Field-Based Location Validation for Global Navigation Satellite Systems. IEEE Trans. Instrum. Meas. 2019, 68, 4937–4944. [Google Scholar] [CrossRef]
- Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Improving the RISS/GNSS Land-Vehicles Integrated Navigation System Using Magnetic Azimuth Updates. IEEE Trans. Intell. Transp. 2020, 21, 1250–1263. [Google Scholar] [CrossRef]
- Vitiello, F.; Causa, F.; Opromolla, R.; Fasano, G. Onboard and External Magnetic Bias Estimation for UAS through CDGNSS/Visual Cooperative Navigation. Sensors 2021, 21, 3582. [Google Scholar] [CrossRef]
- Fan, Y.Y.; Zhang, R.; Liu, Z.; Chu, J.K. A Skylight Orientation Sensor Based on S-Waveplate and Linear Polarizer for Autonomous Navigation. IEEE Sens. J. 2021, 21, 23551–23557. [Google Scholar] [CrossRef]
- Yang, J.; Du, T.; Niu, B.; Li, C.Y.; Qian, J.Q.; Guo, L. A Bionic Polarization Navigation Sensor based on Polarizing Beam Splitter. IEEE Access 2018, 6, 11472–11481. [Google Scholar] [CrossRef]
- Liang, H.J.; Bai, H.Y.; Liu, N.; Sui, X.B. Polarized Skylight Compass based on A Soft-Margin Support Vector Machine Working in Cloudy Conditions. Appl. Opt. 2020, 59, 1271–1279. [Google Scholar] [CrossRef]
- Du, T.; Tian, C.Z.; Yang, J.; Wang, S.P.; Liu, X.; Guo, L. An Autonomous Initial Alignment and Observability Analysis for SINS with Bio-Inspired Polarized Skylight Sensors. IEEE Sens. J. 2020, 20, 7941–7956. [Google Scholar] [CrossRef]
- Shen, C.; Xiong, Y.F.; Zhao, D.H.; Wang, C.G.; Cao, H.L.; Song, X.; Tang, J.; Liu, J. Multi-Rate Strong Tracking Square-Root Cubature Kalman Filter for MEMS-INS/GPS/Polarization Compass Integrated Navigation System. Mech. Syst. Signal Process. 2022, 163, 108146. [Google Scholar] [CrossRef]
- Du, T.; Shi, S.Y.; Zeng, Y.H.; Yang, J.; Guo, L. An Integrated INS/Lidar Odometry/Polarized Camera Pose Estimation via Factor Graph Optimization for Sparse Environment. IEEE Trans. Instrum. Meas. 2022, 71, 8501511. [Google Scholar] [CrossRef]
- Zhao, Y.M.; Yan, G.M.; Qin, Y.Y.; Fu, Q.W. Information Fusion Based on Complementary Filter for SINS/CNS/GPS Integrated Navigation System of Aerospace Plane. Sensors 2020, 20, 7193. [Google Scholar] [CrossRef] [PubMed]
- Xing, H.M.; Liu, Y.; Guo, S.X.; Shi, L.W.; Hou, X.H.; Liu, W.Z.; Zhao, Y. A Multi-Sensor Fusion Self-Localization System of a Miniature Underwater Robot in Structured and GPS-Denied Environments. IEEE Sens. J. 2019, 21, 27136–27146. [Google Scholar] [CrossRef]
- Shen, K.; Wang, M.L.; Fu, M.Y.; Yang, Y.; Yin, Z. Observability Analysis and Adaptive Information Fusion for Integrated Navigation of Unmanned Ground Vehicles. IEEE Trans. Ind. Electron. 2019, 67, 7659–7668. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, X.X.; Zhang, W.G.; Liu, X.H.; Guo, Y.C. A Nonlinear Double Model for Multisensor-Integrated Navigation using The Federated EKF Algorithm for Small UAVs. Sensors 2020, 20, 2974. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Chan, C.Y.; Li, B.; Song, X.H. Multi-Sensor Fusion Methodology for Enhanced Land Vehicle Positioning. Inform. Fusion 2019, 46, 51–62. [Google Scholar] [CrossRef]
- Yan, G.M.; Yan, W.S.; Xu, D.M. Application of simplified UKF in SINS initial alignment for large misalignment angles. J. Chin. Inert. Technol. 2008, 16, 253–264. (In Chinese) [Google Scholar]
- Wang, X.L.; Wang, B.; Li, H.N. An Autonomous Navigation Scheme Based on Geomagnetic and Starlight for Small Satellites. Acta Astronaut. 2012, 81, 40–50. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Attitude | Pitch | 0.4985 deg |
| Roll | 1.1975 deg | |
| Yaw | 88.9975 deg | |
| Initial Velocity | 0 m/s | |
| 0 m/s | ||
| 0 m/s | ||
| Initial Position | Longitude | 116.2705 deg |
| Latitude | 39.9690 deg | |
| Altitude | 115.5942 m | |
| Attitude Error | Pitch | 1 deg |
| Roll | 1 deg | |
| Yaw | 2 deg | |
| Velocity Error | 1 m/s | |
| 1 m/s | ||
| 1 m/s | ||
| Position Error | Longitude | 10 m |
| Latitude | 10 m | |
| Altitude | 10 m | |
| Gyro Parameters | Constant Drift | 5.1 deg/h |
| Random Walk Coefficient | 0.26 deg/ | |
| Accelerometer Parameters | Constant Drift | 0.07 mg |
| Random Walk Coefficient | 0.029 m/s/ | |
| GPS Parameters | Velocity Error | 0.05 m/s |
| Horizontal Position Error | 2.5 m | |
| Altitude Error | 0.025 m | |
| Polarization Parameters | Solar Azimuth | 102.0630 deg |
| Solar Zenith | 45.5189 deg | |
| Sensor Accuracy | 0.1 deg | |
| Sampling Rates | 100 Hz | |
| Geomagnetic Parameters | Sensor Accuracy | 0.1 nT |
| Sampling Rates | 100 Hz |
| SINS/GPS /Geomagnetic /Polarization | SINS/GPS /Geomagnetic | SINS/GPS /Polarization | ||
|---|---|---|---|---|
| Attitude (deg) | Pitch | 0.5209 | 1.2046 | 3.2200 |
| Roll | 0.3692 | 1.1026 | 2.7319 | |
| Yaw | 6.52670 | 24.6654 | 1.9905 | |
| Velocity (m/s) | 0.0800 | 0.0850 | 0.0965 | |
| 0.0808 | 0.0872 | 0.0936 | ||
| 0.0228 | 0.0610 | 0.2523 | ||
| Position | Longitude (deg) | 0.0002 | 0.0004 | 0.0040 |
| Latitude (deg) | 0.0003 | 0.0003 | 0.0056 | |
| Altitude (m) | 0.4248 | 0.8345 | 2.8849 | |
| Federal UKF | Federal KF | ||
|---|---|---|---|
| Attitude (deg) | Pitch | 0.5443 | 0.9658 |
| Roll | 0.3691 | 0.4293 | |
| Yaw | 6.5267 | 10.1535 | |
| Velocity (m/s) | 0.0800 | 0.3572 | |
| 0.0808 | 0.3232 | ||
| 0.0228 | 0.1376 | ||
| Position | Longitude (deg) | 0.0002 | 0.0002 |
| Latitude (deg) | 0.0003 | 0.0002 | |
| Altitude (m) | 0.4248 | 8.9336 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, S.; Gao, H.; You, J. In-Flight Alignment of Integrated SINS/GPS/Polarization/Geomagnetic Navigation System Based on Federal UKF. Sensors 2022, 22, 5985. https://doi.org/10.3390/s22165985
Cao S, Gao H, You J. In-Flight Alignment of Integrated SINS/GPS/Polarization/Geomagnetic Navigation System Based on Federal UKF. Sensors. 2022; 22(16):5985. https://doi.org/10.3390/s22165985
Chicago/Turabian StyleCao, Songyin, Honglian Gao, and Jie You. 2022. "In-Flight Alignment of Integrated SINS/GPS/Polarization/Geomagnetic Navigation System Based on Federal UKF" Sensors 22, no. 16: 5985. https://doi.org/10.3390/s22165985