
Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems



Abstract
:1. Introduction
- For the problem of expensive pilot overhead due to many channel coefficients, we introduce semi-passive elements to assist channel estimation and then propose a channel estimation protocol based on the coherence time difference between BS-RIS quasi-static channels and time-varying UE-RIS channels, in which the BS-RIS channels are estimated at long time scales using semi-passive elements and the BS estimates the UE-RIS channels at short time scales.The proposed channel estimation protocol is able to reduce the average pilot overhead at long time scales.
- To estimate BS-RIS channel, we propose an iterative re-weighting-based super-resolution algorithm to estimate the BS-RIS channel. We transform the BS-RIS channel estimation problem to the optimization problem of a new objective function by an iterative weighting method, which is the weighted summation of the sparsity and the data fitting error, Then we propose a gradient descent method to solve the objective function problem and update the weight parameters at each iteration to balance the sparsity with the data fitting error. During the iterative process, the estimated parameters move gradually to the neighborhood of the true value.Compared to traditional algorithms, the proposed algorithm is able to converge the estimates to near the true value and achieve accurate estimates.
- To estimate the time-varying channel of the UE-RIS, we propose a LS algorithm based on parallel factor(PARAFAC) decomposition to estimate the time-varying channel of the UE-RIS. We transform the received signal model into an equivalent PARAFAC tensor model, then obtain the the UE-RIS channel by LS algorithm.The proposed algorithm has higher robustness compared to the traditional algorithm by using PARAFAC decomposition, which avoids the problem of non-existence of matrix inverse.
2. Channel Model and Channel Estimation Protocol
2.1. Channel Model
2.2. Channel Estimation Protocol
3. Stage 1: Estimation of the BS-RIS Channel
3.1. Downlink Pilot Transmission and Optimization Formulation
3.1.1. Downlink Pilot Transmission
3.1.2. Optimization Formulation
3.2. Propose Super-Resolution Channel Estimation Scheme
3.3. SVD Algorithm of Preconditioning
| Algorithm 1 Two-stage channel estimation algorithm |
| Stage 1: Estimation of the BS-RIS Channel. |
| Input: Receive signal , combination matrix W, pilot signal , BS-RIS channel G, selection matrix , trimming threshold , termination thresholds and the number of paths to detect. Output: Estimated with and the path gain for each path. |
| 1. |
| 2. Take the first columns of U, V and largest singular values. |
| 3. for do |
| 4. Calculated from Equations (26) and (27). |
| 5. end for |
| 6. Output , and , . |
| 7. Initialize according to Equation (17). |
| 8. Repeat: |
| 9. Update according to Equation (19) . |
| 10. Calculated from Equation (18) . |
| 11. Iterate according to Equations (21) and (22) to find the optimal , and , . |
| 12. Calculate the path gain according to Equation (17). |
| 13. Trim path number l if . |
| 14. until and |
| 15. , , . |
| 16. Reconstructed from Equation (9) . |
| Stage 2: Estimation of the UE-RIS Channel. |
| Input: Receive signal , combination matrix W, pilot signal , the BS-RIS estimated channel , and the UE-RIS channel . |
| Output: . |
| 17. The PARAFAC decomposition channel problem is obtained according to Equation (34). |
| 18.Estimate according to Equation (35). |
3.4. Pilot Overhead and Computational Complexity
3.4.1. Pilot Overhead
3.4.2. Computational Complexity
4. Stage 2: Estimation of the UE-RIS Channel
4.1. Uplink Pilot Transmission and Problem Formulation
4.1.1. Uplink Pilot Transmission
4.1.2. Problem Formulation
4.2. The LS Algorithm Based on PARAFAC Decomposition
4.3. Pilot Overhead and Computational Complexity
4.3.1. Pilot Overhead
4.3.2. Computational Complexity
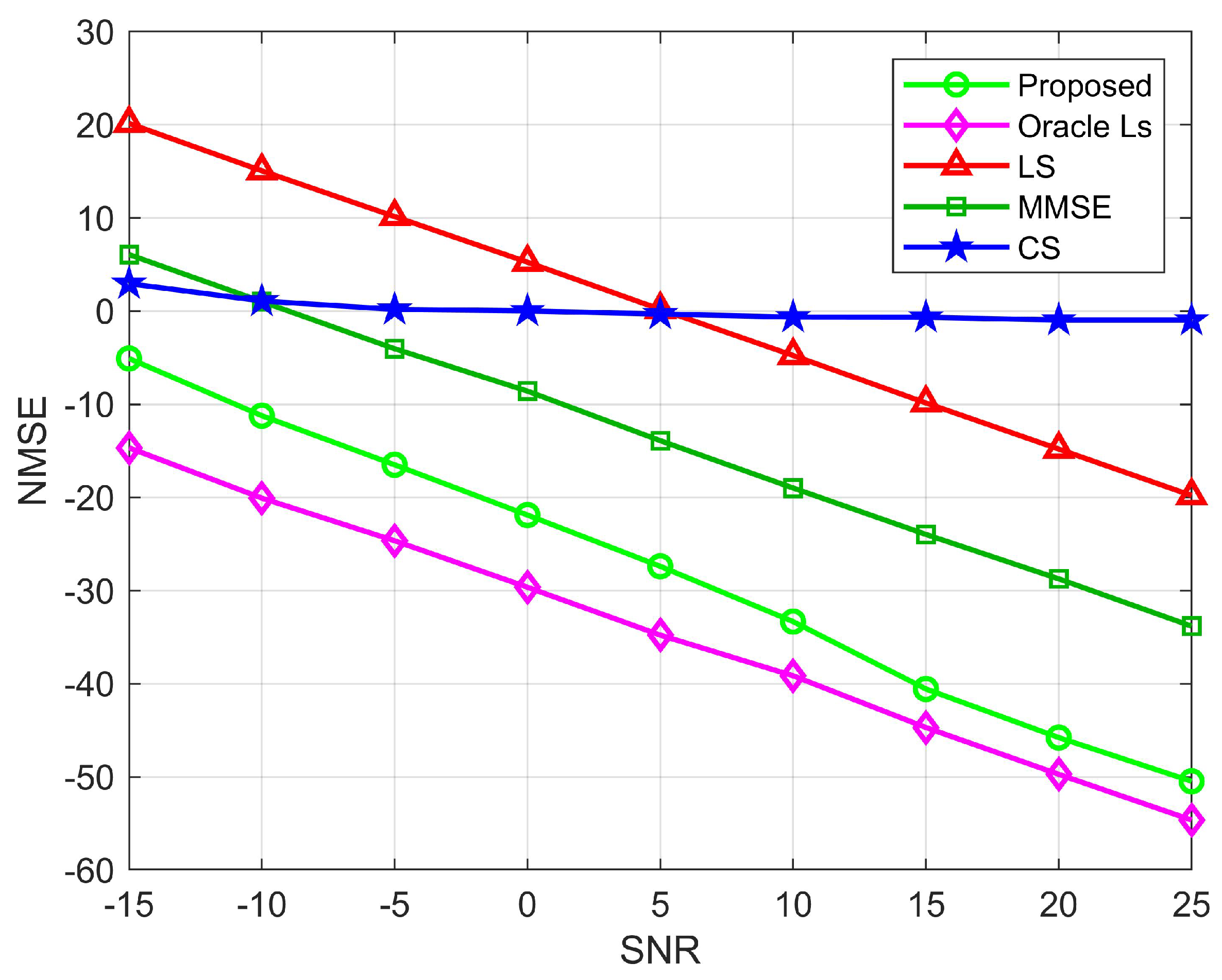
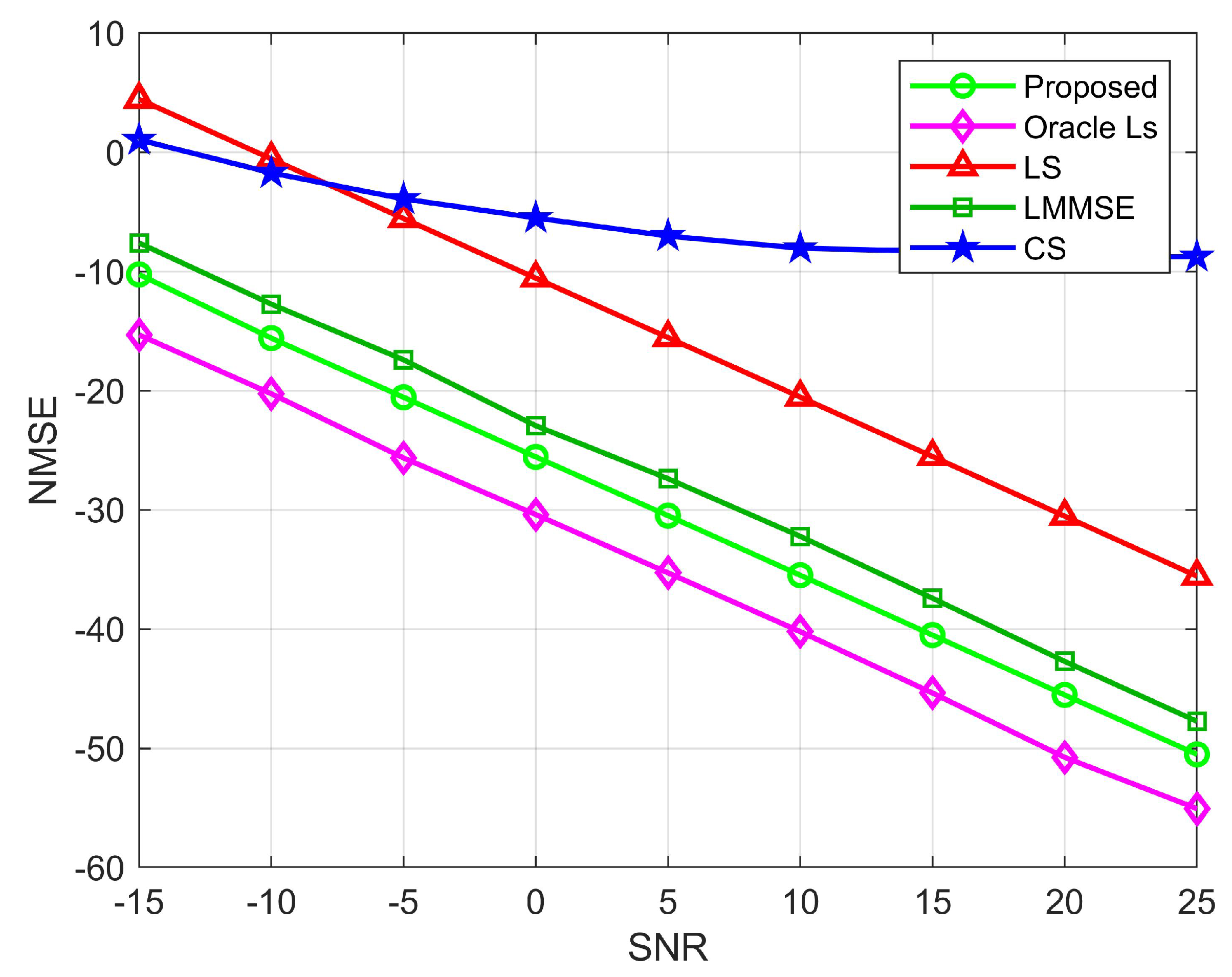
5. Simulation Results
5.1. Parameter Setting and Simulation Analysis
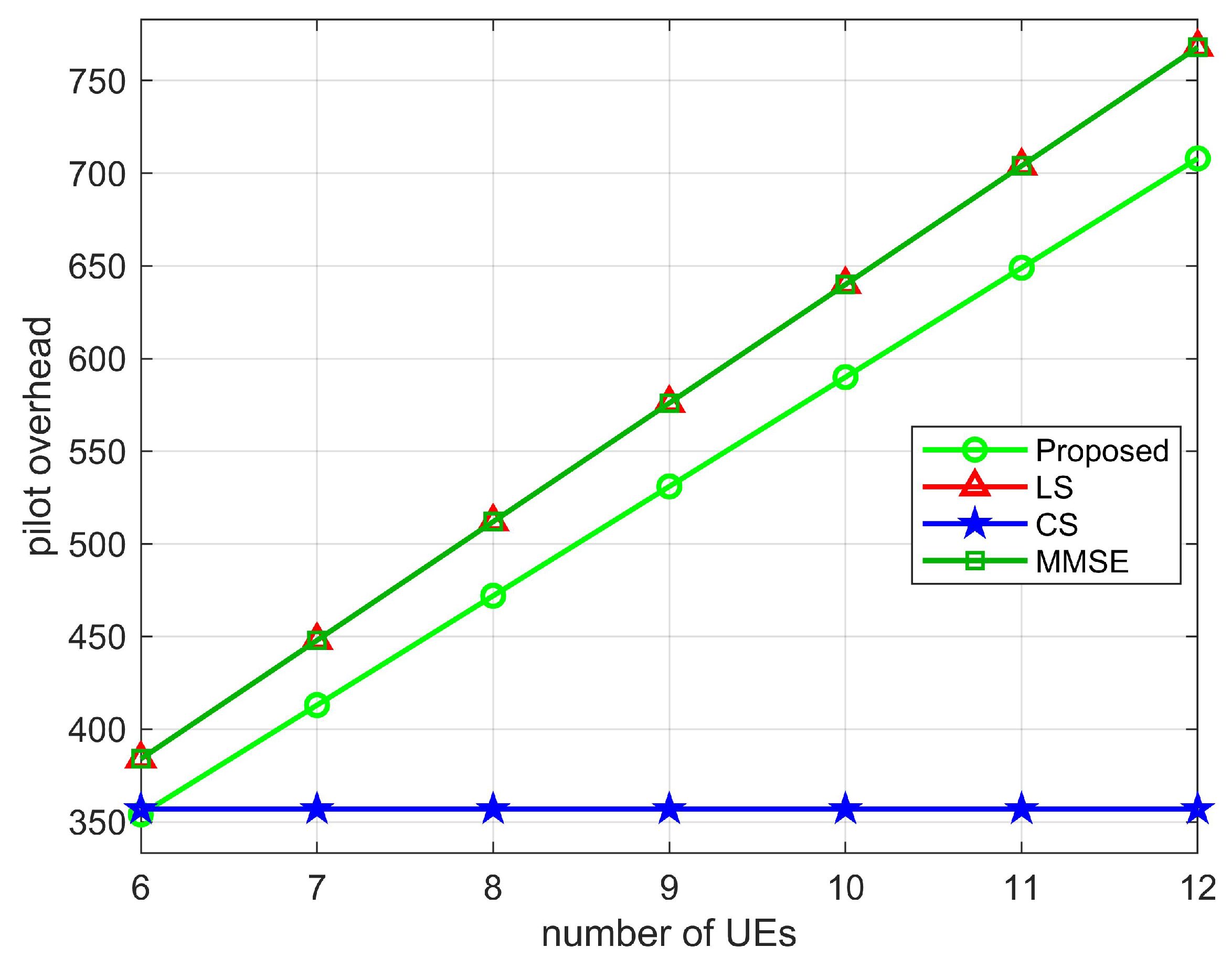
5.2. Pilot Overhead and Computational Complexity Analysis
5.2.1. Pilot Overhead
5.2.2. Computational Complexity
6. Conclusions and Future Work
6.1. Conclusions
6.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nemati, M.; Park, J.; Choi, J. RIS-Assisted Coverage Enhancement in Millimeter-Wave Cellular Networks. IEEE Access 2020, 8, 188171–188185. [Google Scholar] [CrossRef]
- Hassan, K.; Masarra, M.; Zwingelstein, M.; Dayoub, I. Channel Estimation Techniques for Millimeter-Wave Communication Systems: Achievements and Challenges. IEEE Open J. Commun. Soc. 2020, 1, 1336–1363. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Communications: A Tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Zhong, C.; Alouini, M.; Zhang, Z. Robust design for IRS-aided communication systems with user location uncertainty. IEEE Commun. Lett. 2020, 10, 63–67. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Schober, R. Joint Deployment and Multiple Access Design for Intelligent Reflecting Surface Assisted Networks. IEEE Trans. Commun. 2021, 20, 6648–6664. [Google Scholar] [CrossRef]
- Mishra, D.; Johansson, H. Channel estimation and low-complexity beamforming design for passive intelligent surface assisted MISO wire less energy transfer. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech Signal Process (ICASSP’19), Brighton, UK, 12–17 May 2019; pp. 4659–4663. [Google Scholar]
- Jensen, T.L.; Carvalho, E.D. On optimal channel estimation scheme for intelligent reflecting surfaces based on a minimum variance unbiased estimator. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Barcelona, Spain, 4–8 May 2020; pp. 5000–5004. [Google Scholar]
- Alwazani, H.; Kammoun, A.; Chaaban, A. Intelligent reflecting surface-assisted multi-user MISO communication: Channel estimation and beamforming design. IEEE Open J. Commun. Soc. 2020, 1, 661–680. [Google Scholar]
- Lin, J.; Wang, G.; Fan, R. Channel estimation for wireless communication systems assisted by large intelligent surfaces. arXiv 2020, arXiv:1911.02158. [Google Scholar]
- Wang, Z.; Liu, L.; Cui, S. Channel estimation for intelligent reflecting surface assisted multiuser communications: Framework, algorithms, and analysis. IEEE Trans. Wireless Commun. 2020, 19, 6607–6620. [Google Scholar] [CrossRef]
- He, Z.; Yuan, X. Cascaded Channel Estimation for Large Intelligent Metasurface Assisted Massive MIMO. IEEE Commun. Lett. 2020, 9, 210–214. [Google Scholar] [CrossRef] [Green Version]
- Ardah, K.; Gherekhloo, S.; de Almeida, A.L.F.; Haardt, M. TRICE: A channel estimation framework for RIS-aided millimeter-wave MIMO systems. IEEE Signal Process. Lett. 2021, 28, 513–517. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Duan, H.; Li, H. Compressed channel estimation for intelligent reflecting surface-assisted millimeter wave systems. IEEE Signal Process. Lett. 2020, 27, 905–909. [Google Scholar] [CrossRef]
- Taha, A.; Alrabeiah, M.; Alkhateeb, A. Enabling large intelligent surfaces with compressive sensing and deep Learning. IEEE Access 2021, 9, 44304–44321. [Google Scholar] [CrossRef]
- Taha, A.; Alrabeiah, M.; Alkhateeb, A. Deep learning for large intelligent surfaces in millimeter wave and massive MIMO systems. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Liu, S.; Gao, Z.; Zhang, J.; Renzo, M.D.; Alouini, M.-S. Deep denoising neural network assisted compressive channel estimation for mmWave intelligent reflecting surfaces. IEEE Trans. Veh. Technol. 2020, 69, 9223–9228. [Google Scholar] [CrossRef]
- Zhu, Z.; Deng, H.; Xu, F.; Zhang, W.; Liu, G.; Zhang, Y. Hybrid Precoding-Based Millimeter Wave Massive MIMO-NOMA Systems. Symmetry 2022, 14, 412. [Google Scholar] [CrossRef]
- Fang, J.; Wang, F.; Shen, Y.; Li, H.; Blum, R.S. Super-resolution compressed sensing for line spectral estimation: An iterative reweighted approach. IEEE Trans. Signal Process. 2016, 64, 4649–4662. [Google Scholar] [CrossRef]
- Hu, C.; Dai, L.; Mir, T.; Gao, Z.; Fang, J. Super-resolution channel estimation for mmWave massive MIMO with hybrid precoding. IEEE Trans. Veh. Technol. 2018, 67, 8954–8958. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Dai, L.; Han, S.; Wang, X. Two-Timescale Channel Estimation for Reconfigurable Intelligent Surface Aided Wireless Communications. IEEE Trans. Commun. 2021, 69, 7736–7747. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W. Tensor decompositions and applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- De Araújo, G.T.; De Almeida, A.L.F.; Boyer, R. Channel Estimation for Intelligent Reflecting Surface Assisted MIMO Systems: A Tensor Modeling Approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 789–802. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RIS Configuration | Previous Work |
|---|---|
| Passive RIS | Channel estimation based on conventional least-squares (LS) algorithm for the RIS-assisted MIMO system [8,9]. |
| The MMSE algorithm is used to estimate the cascade channel for the RIS-assisted MIMO system [10]. | |
| Channel estimation based on the methods of Lagrange multipliers and a dual ascent-based algorithm for the RIS-assisted MIMO system [11]. | |
| Reference user-based channel estimation by using the common BS- RIS channel of the RIS-assisted MISO system [12]. | |
| Channel estimation based on the methods of a sparse matrix decomposition and complementary channel estimation method for the RIS-assisted MIMO system [13,14]. | |
| Compression-sensing-based channel estimation based on sparse re-presentation of cascaded channel [15]. | |
| Semi-passive RIS | Channel estimation based on compressed sensing for the RIS-assist-ed SISO system [16,17,18]. |
| Algorithm | Average Spectrum Efficiency (bps/Hz) |
|---|---|
| Perfect Channel | 13.089 |
| Proposed | 12.911 |
| LS | 5.725 |
| CS | 8.053 |
| MMSE | 11.695 |
| Algorithm | Minimum Pilot Overhead |
|---|---|
| Proposed | |
| LS | |
| CS | |
| MMSE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.; Deng, H.; Xiao, H.; Qian, Y.; Zhang, W.; Zhang, Y. Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems. Sensors 2022, 22, 5908. https://doi.org/10.3390/s22155908
Peng C, Deng H, Xiao H, Qian Y, Zhang W, Zhang Y. Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems. Sensors. 2022; 22(15):5908. https://doi.org/10.3390/s22155908
Chicago/Turabian StylePeng, Chengzuo, Honggui Deng, Haoqi Xiao, Yuyan Qian, Wenjuan Zhang, and Yinhao Zhang. 2022. "Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems" Sensors 22, no. 15: 5908. https://doi.org/10.3390/s22155908