
Indoor Visual-Based Localization System for Multi-Rotor UAVs


Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
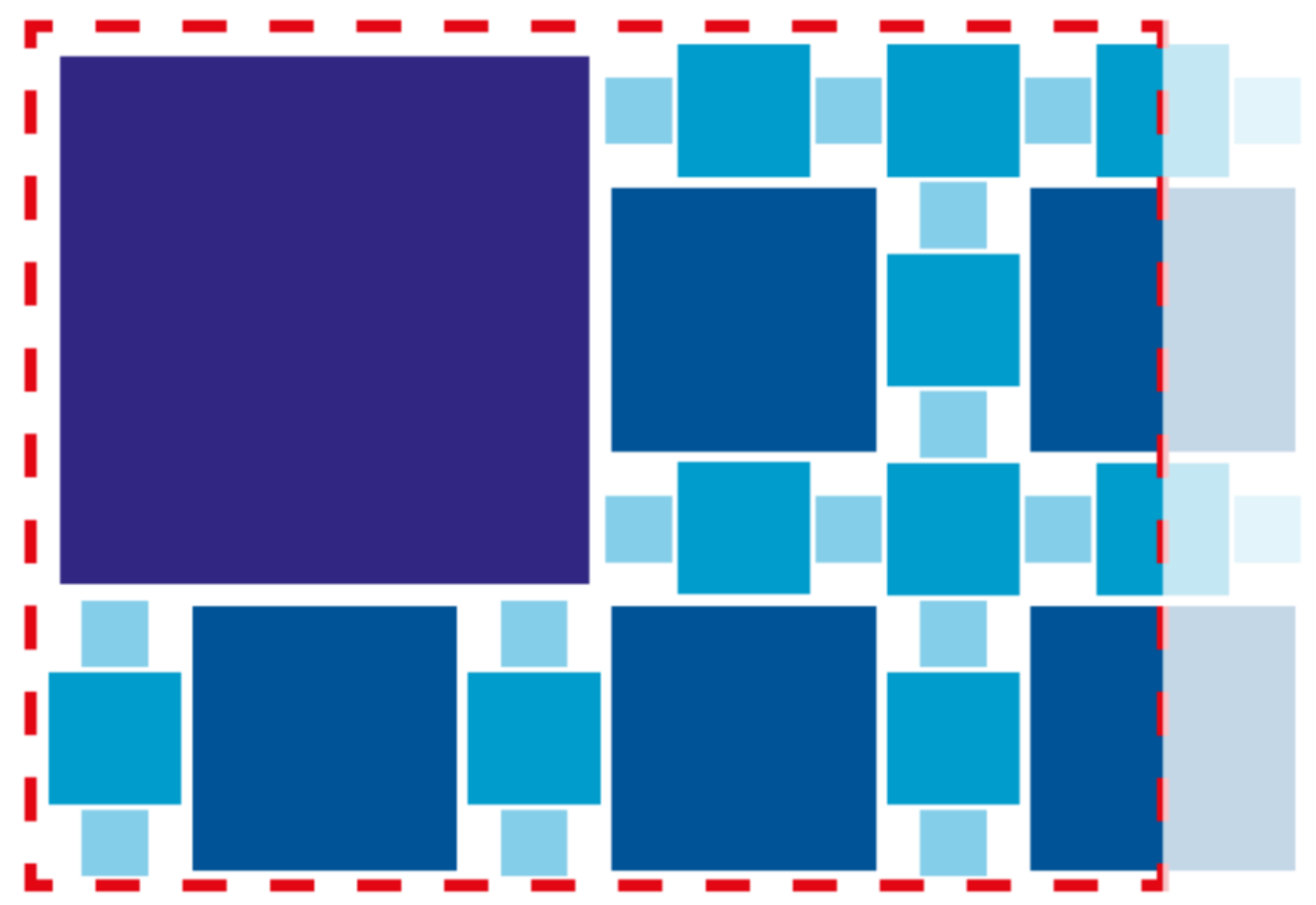
- Density—the map counts a high number of narrowly placed tags;
- Size heterogeneity—the map is made up of fiducials belonging to four different classes in terms of size.
1.3. Paper Structure
2. Problem Statement
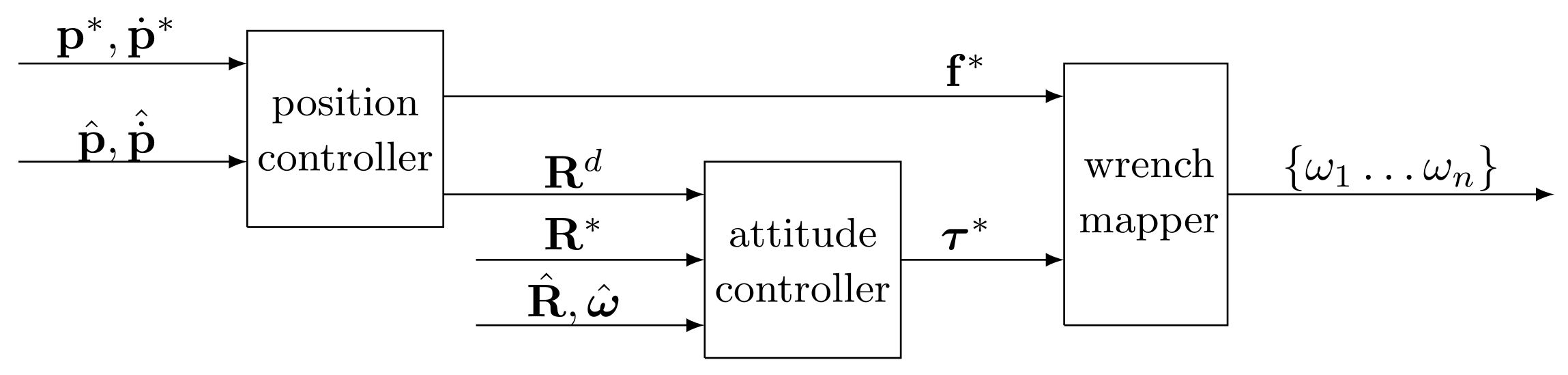
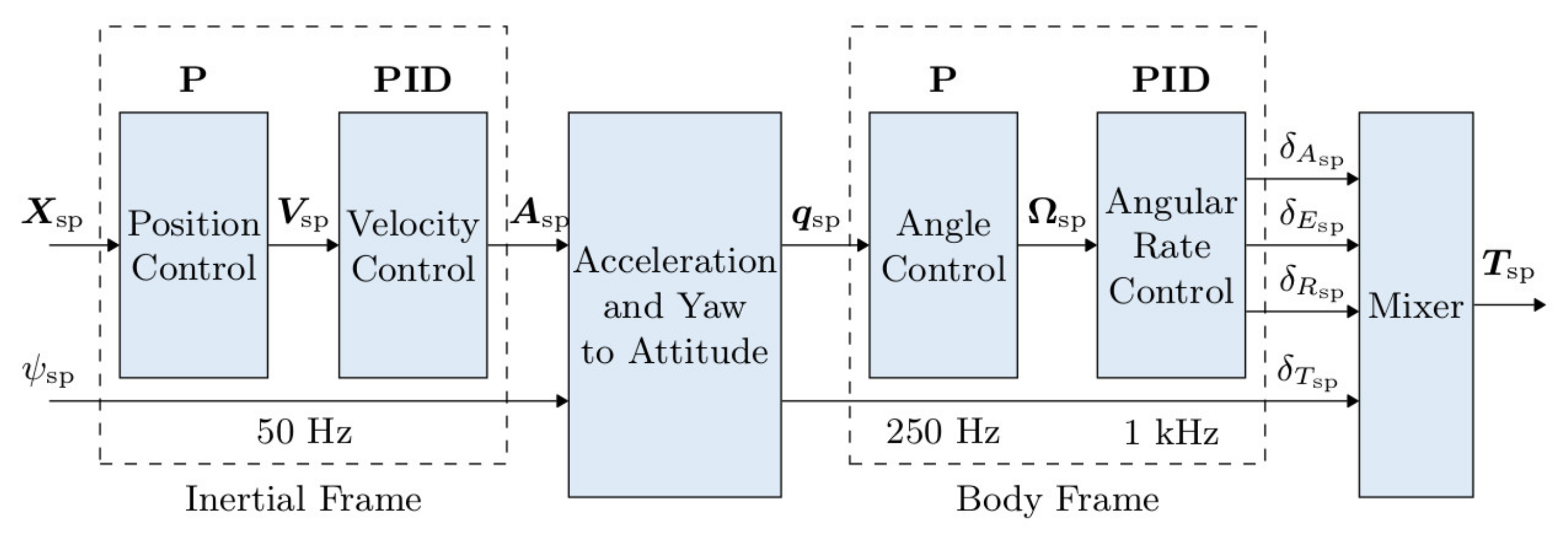
2.1. Star-Shaped Multi-Rotor Modeling and Control
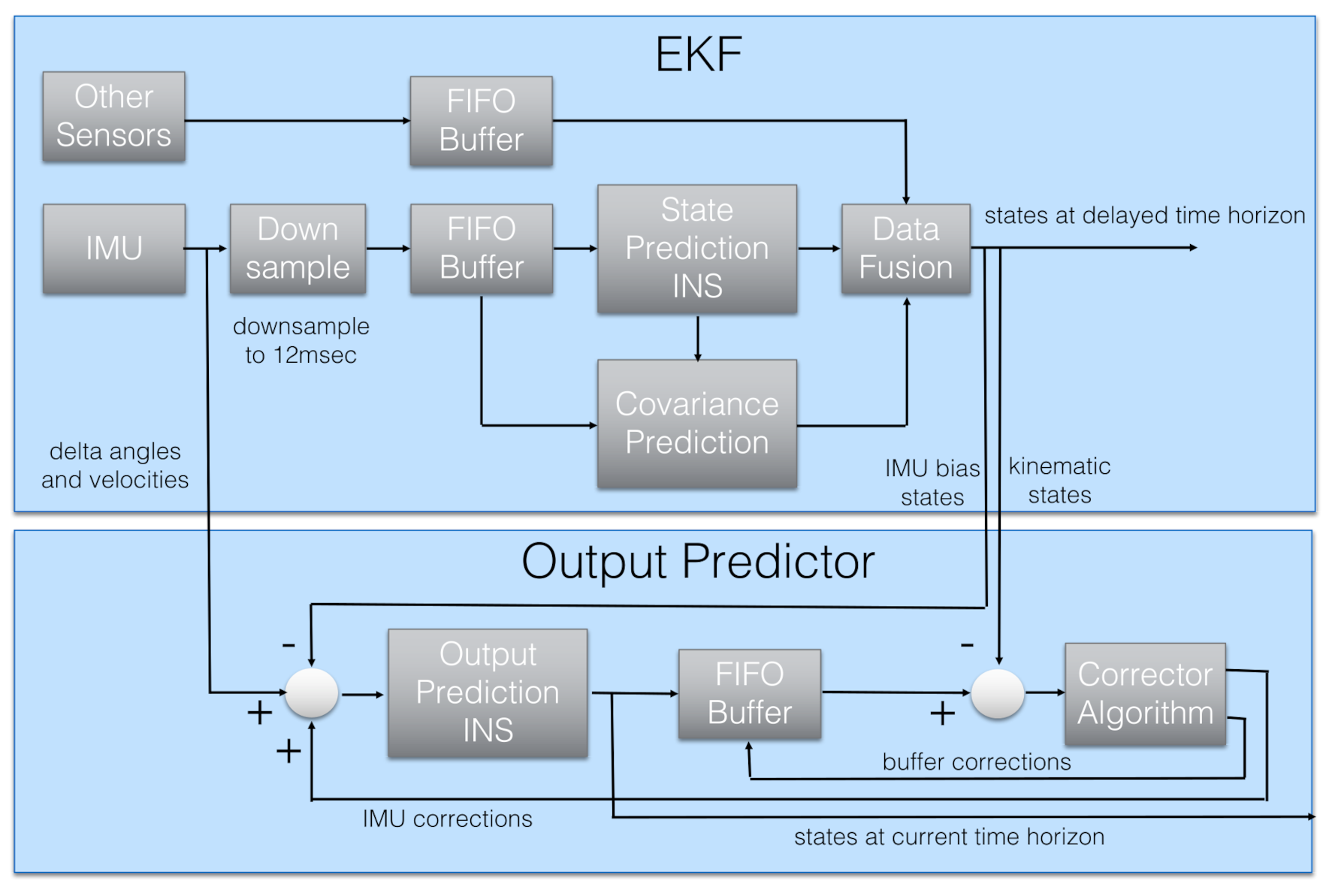
2.2. Kalman-Based Sensor Fusion
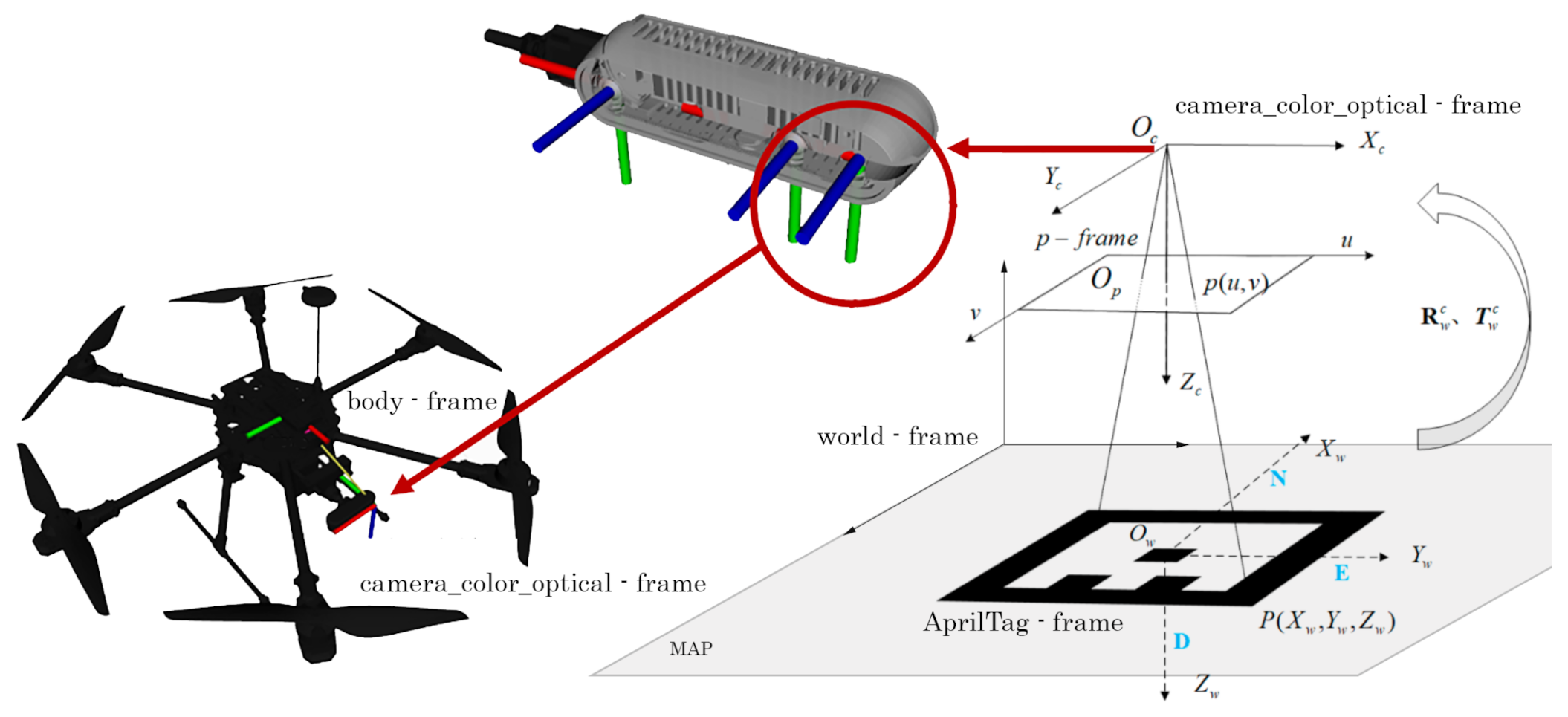
3. VIO Localization
3.1. Map Definition
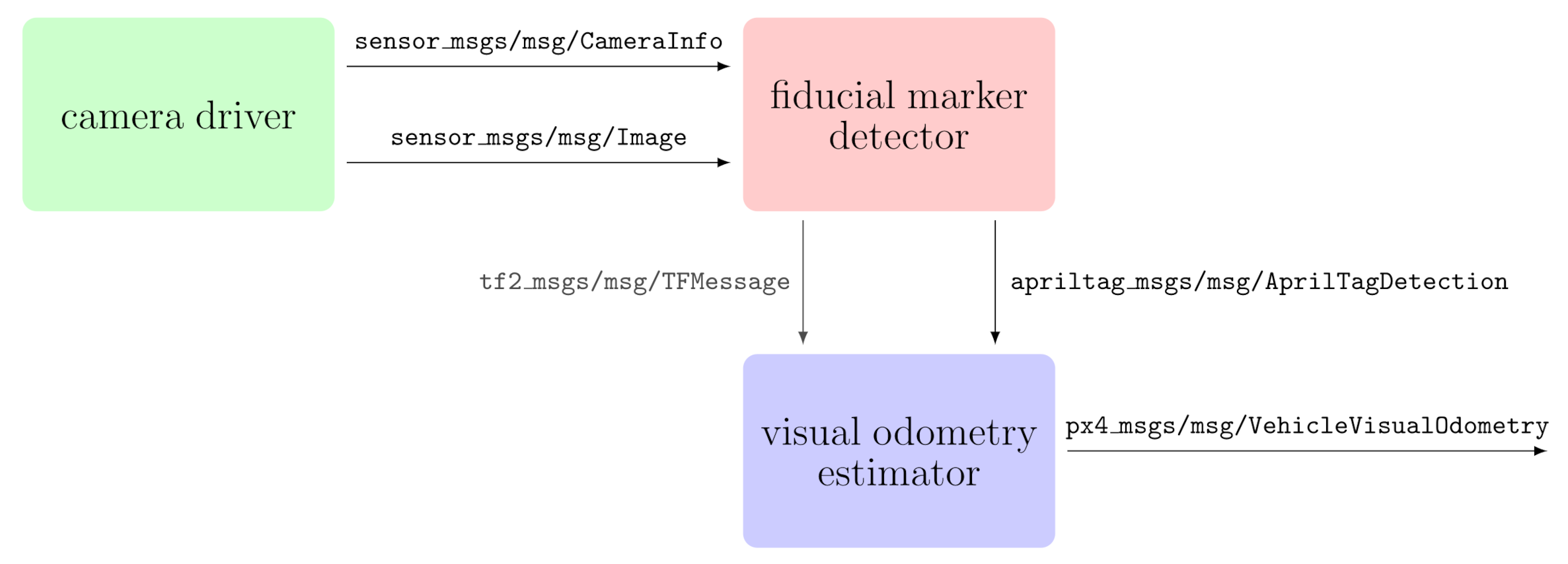
3.2. Ros2 Implementation
4. Validation
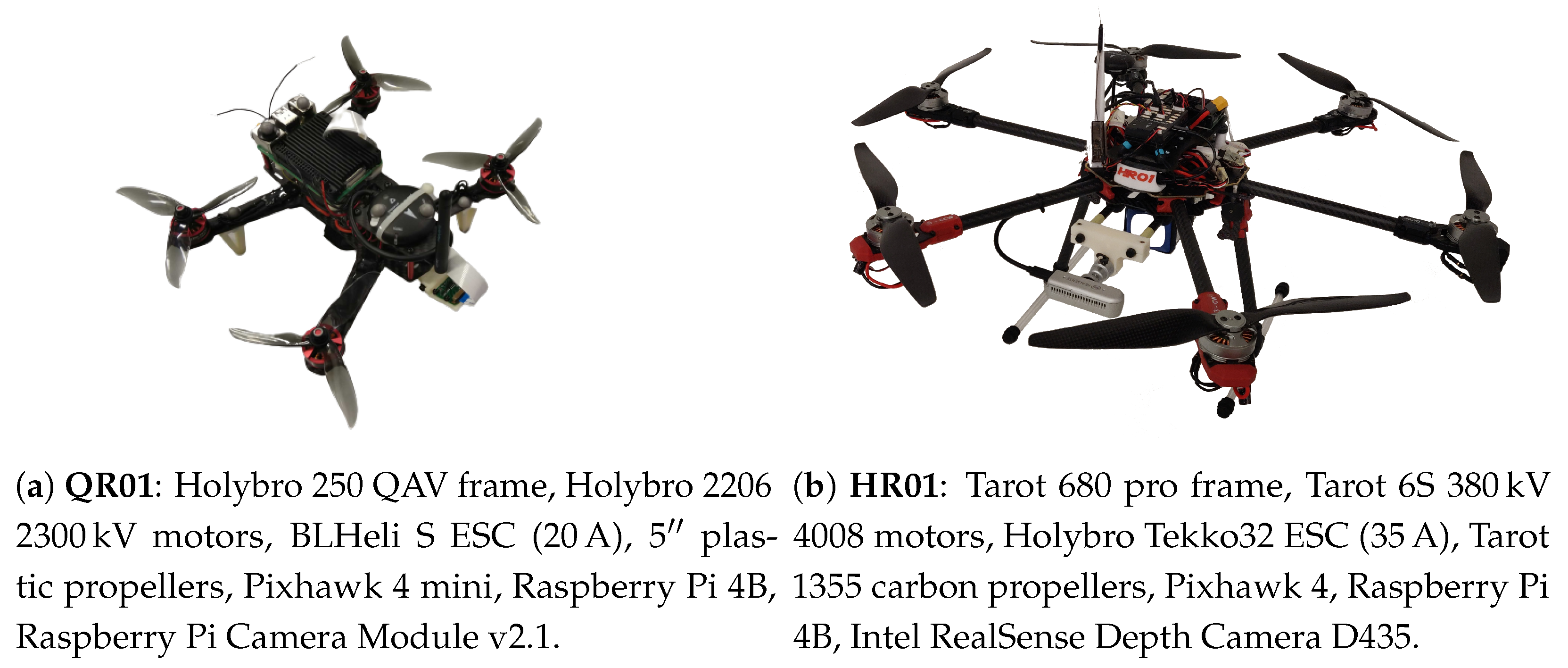
4.1. Experimental Setup
4.2. Experiments Design
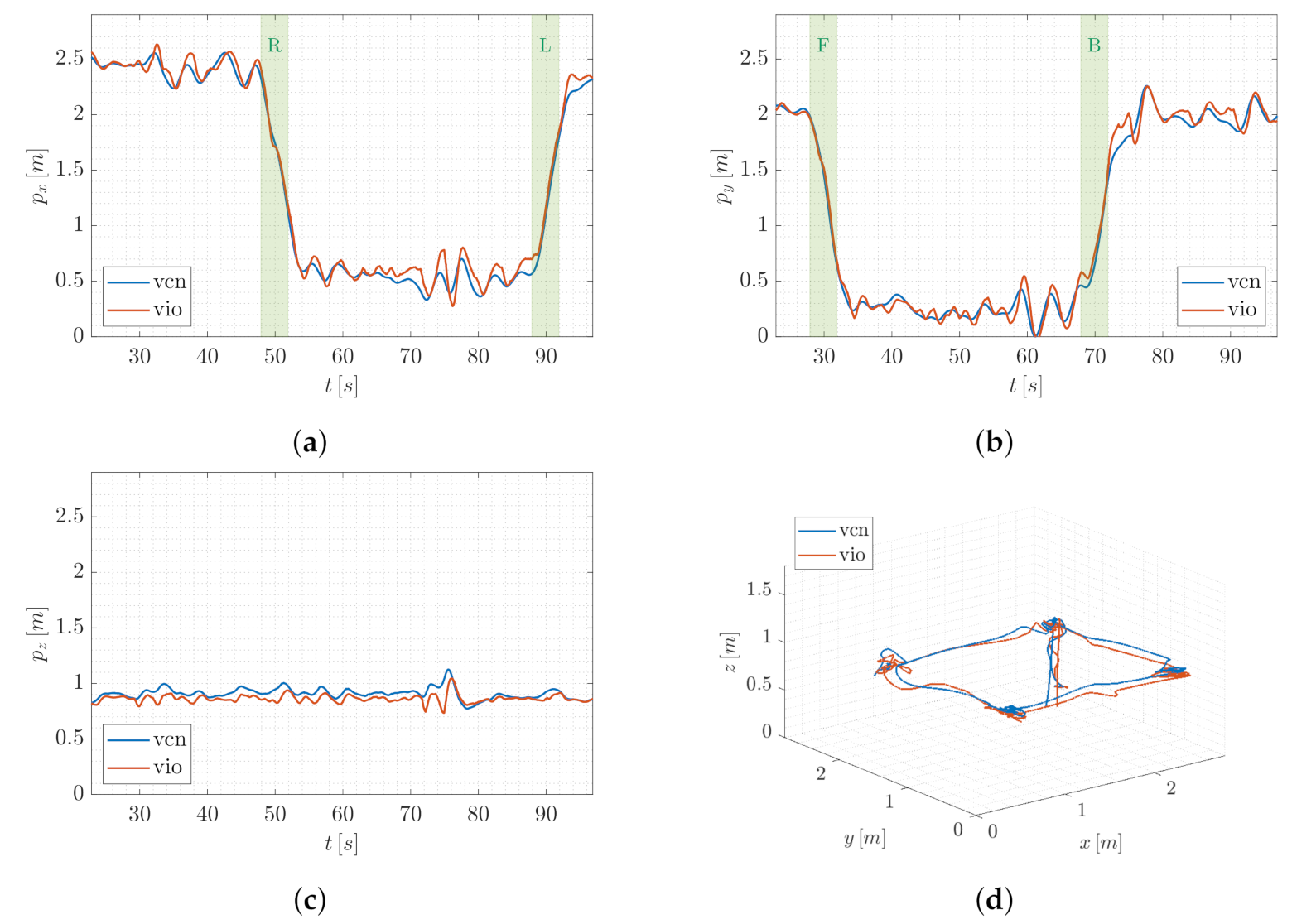
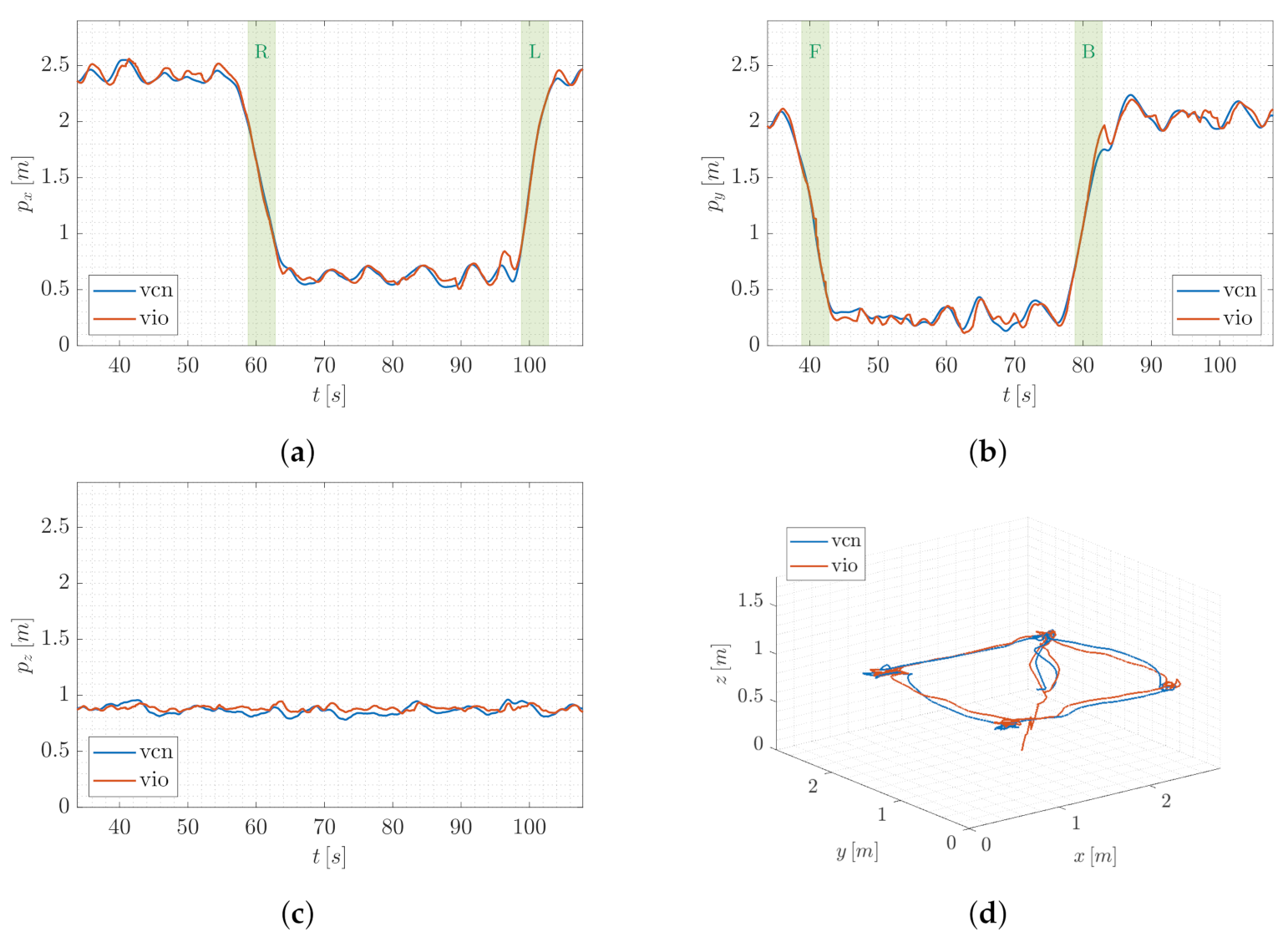
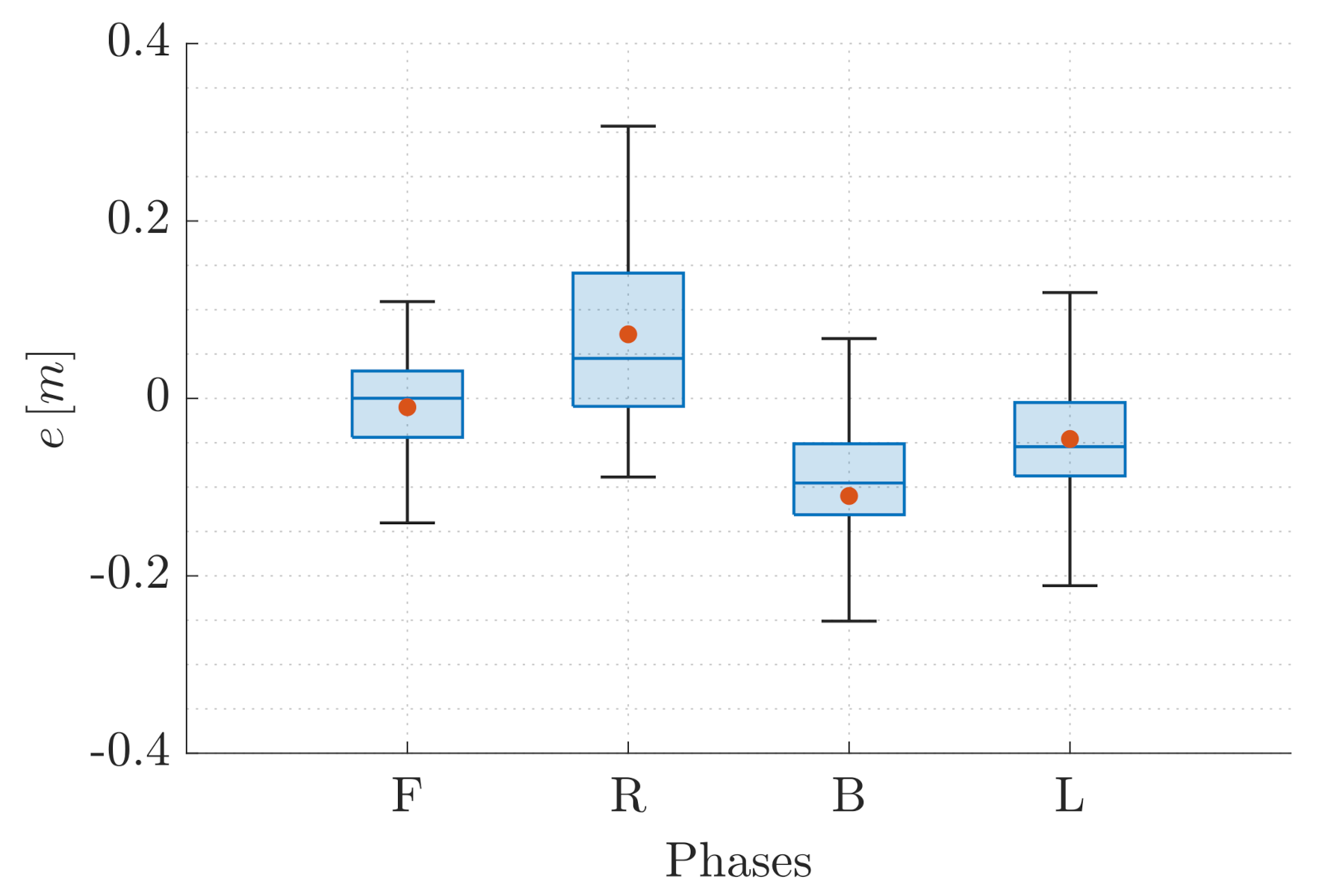
4.2.1. T1: Planar Square Trajectory
- Move forward (F phase—movement along the negative direction of y-axis of world frame);
- Translate along the orthogonal direction on the right (R phase—movement along the negative direction of x-axis of world frame);
- Move backward (B phase—movement along the positive direction of y-axis of world frame);
- and finally, translate along the orthogonal direction on the left (L phase—movement along the positive direction of x-axis of world frame) returning to the starting point.
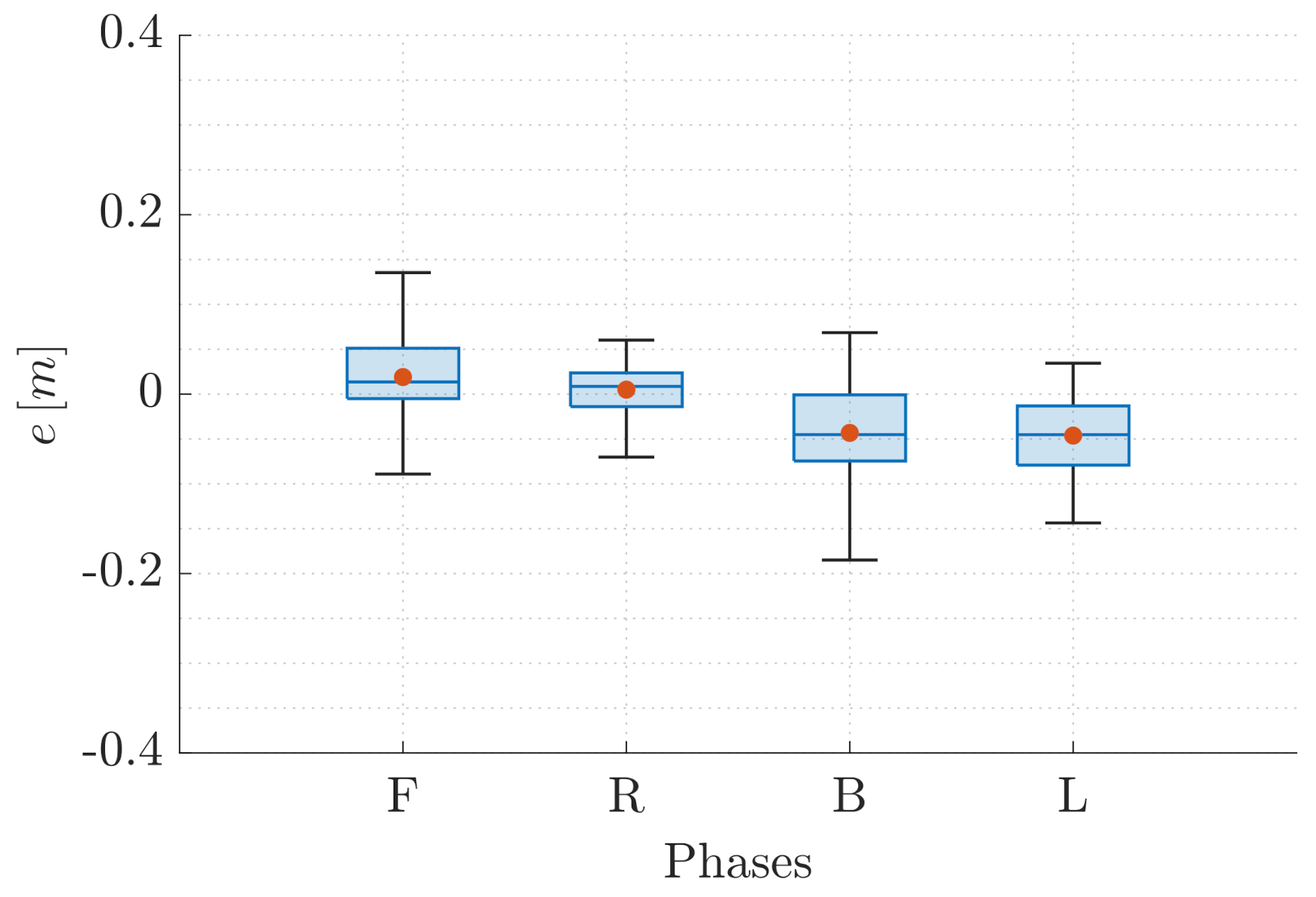
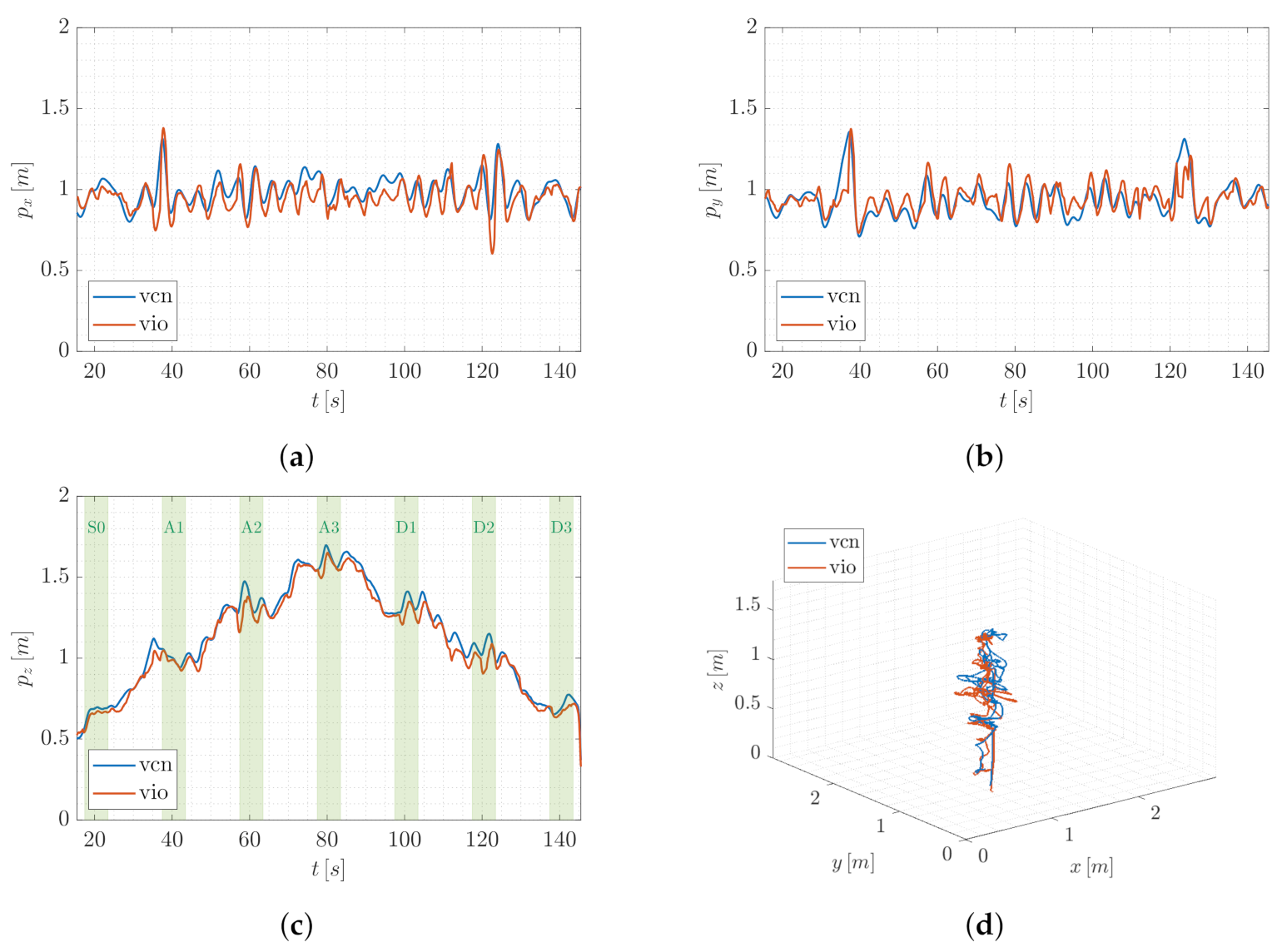
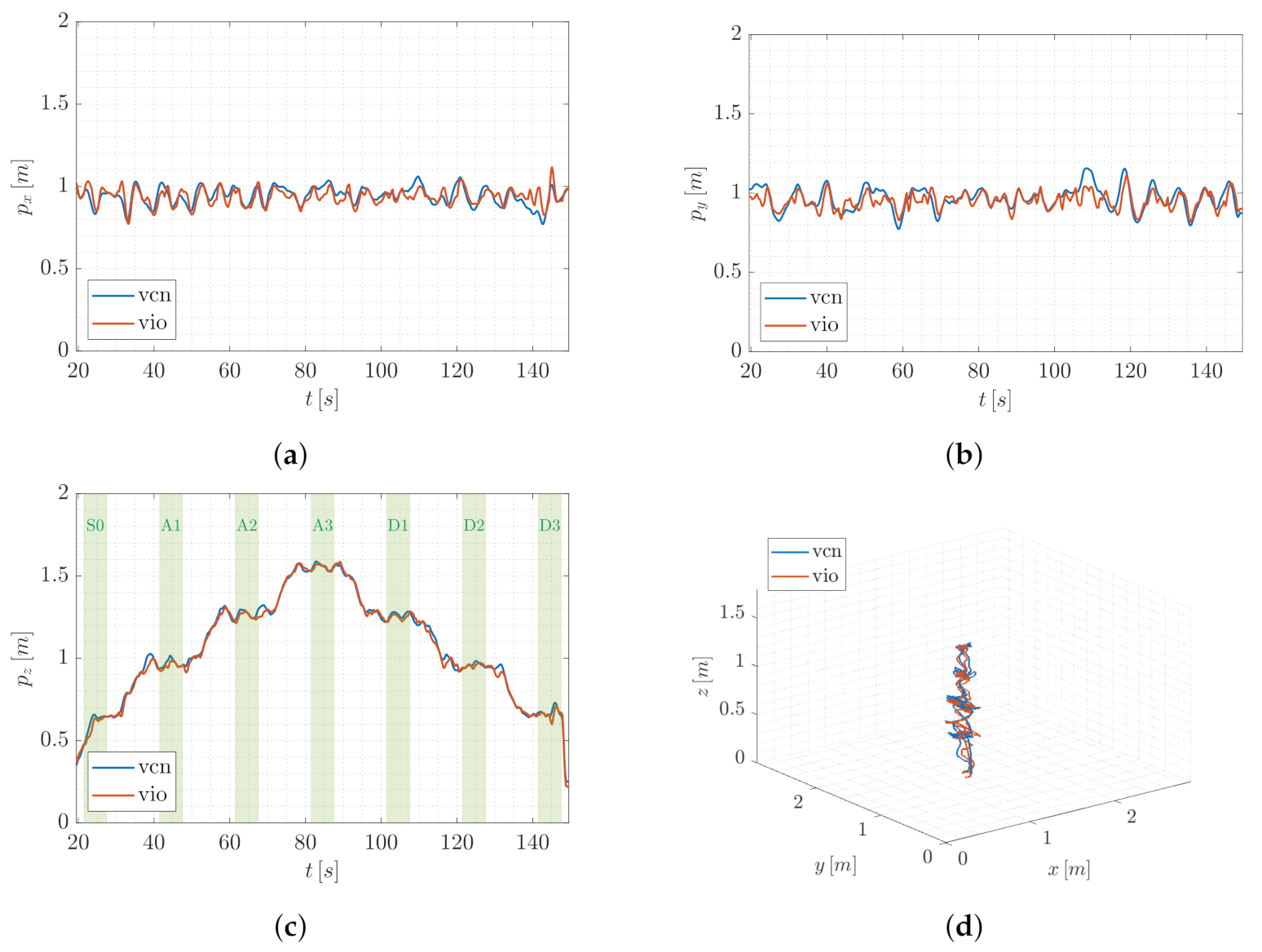
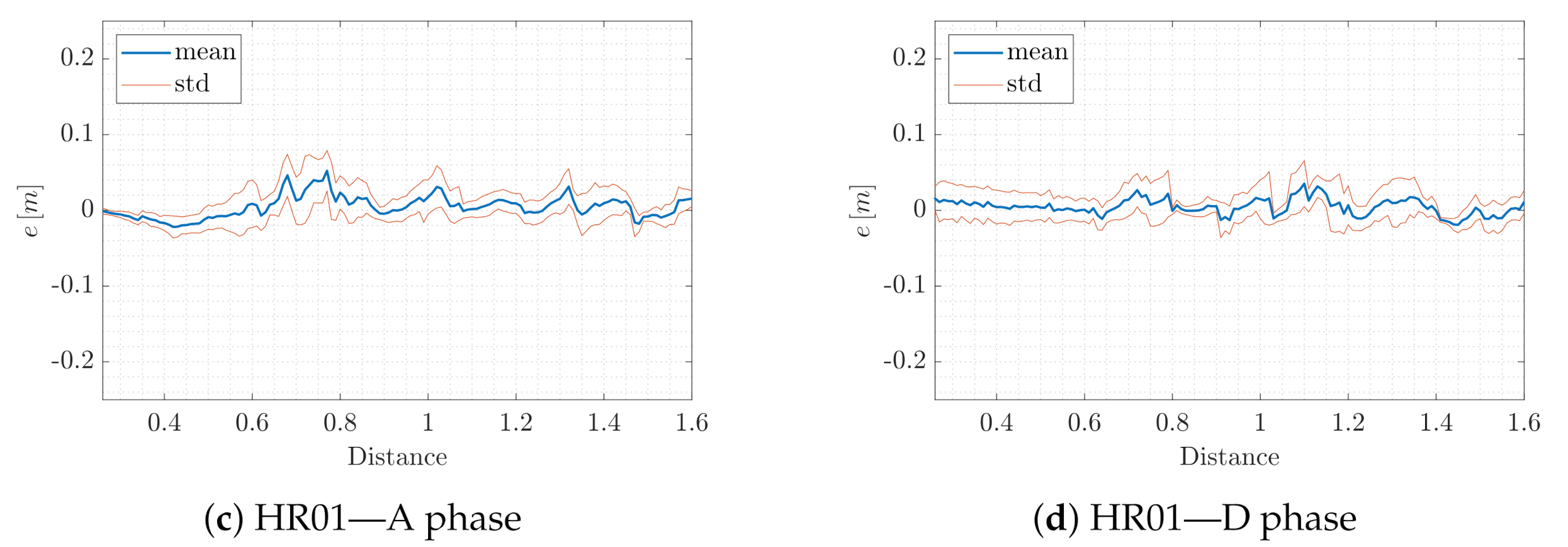
4.2.2. T2: Vertical Steps Trajectory
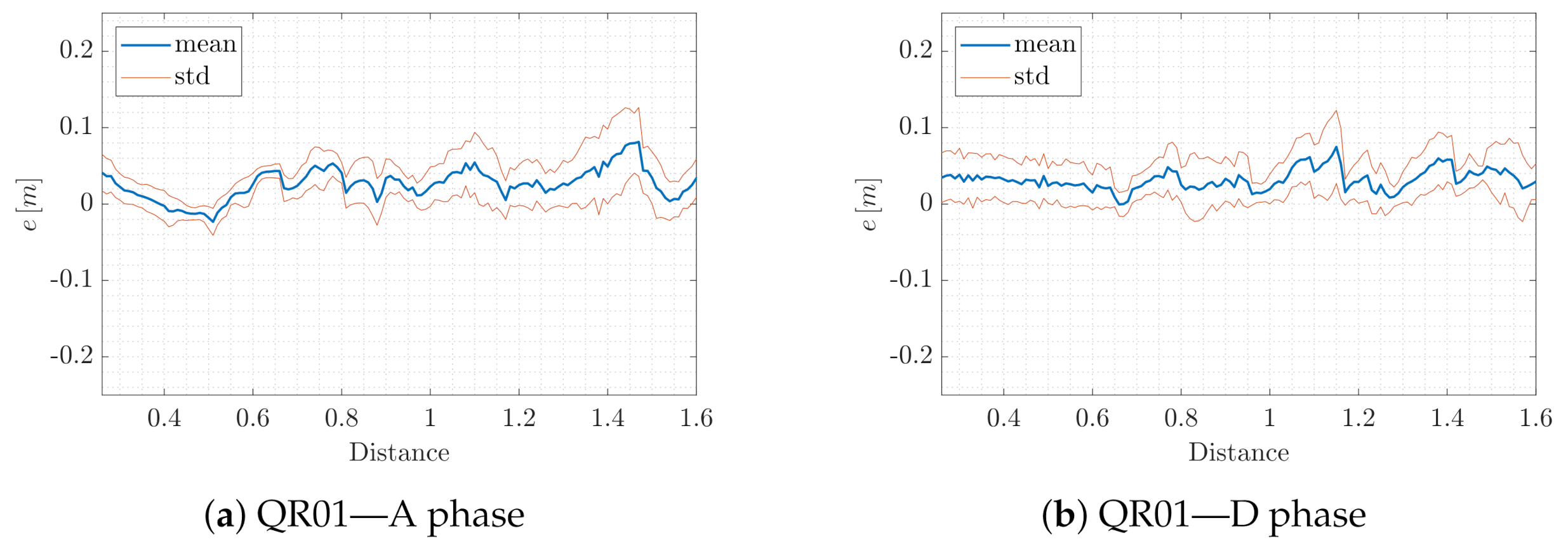
- An ascent phase (A phase—movement along the positive direction of z-axis of world frame) consisting of three consecutive steps of amplitude , starting from the initial height of from the ground;
- A following descent phase (D phase—movement along the negative direction of z-axis of world frame) consisting of three consecutive steps of amplitude , starting from .
4.3. Experimental Results
4.3.1. T1: Planar Square Trajectory
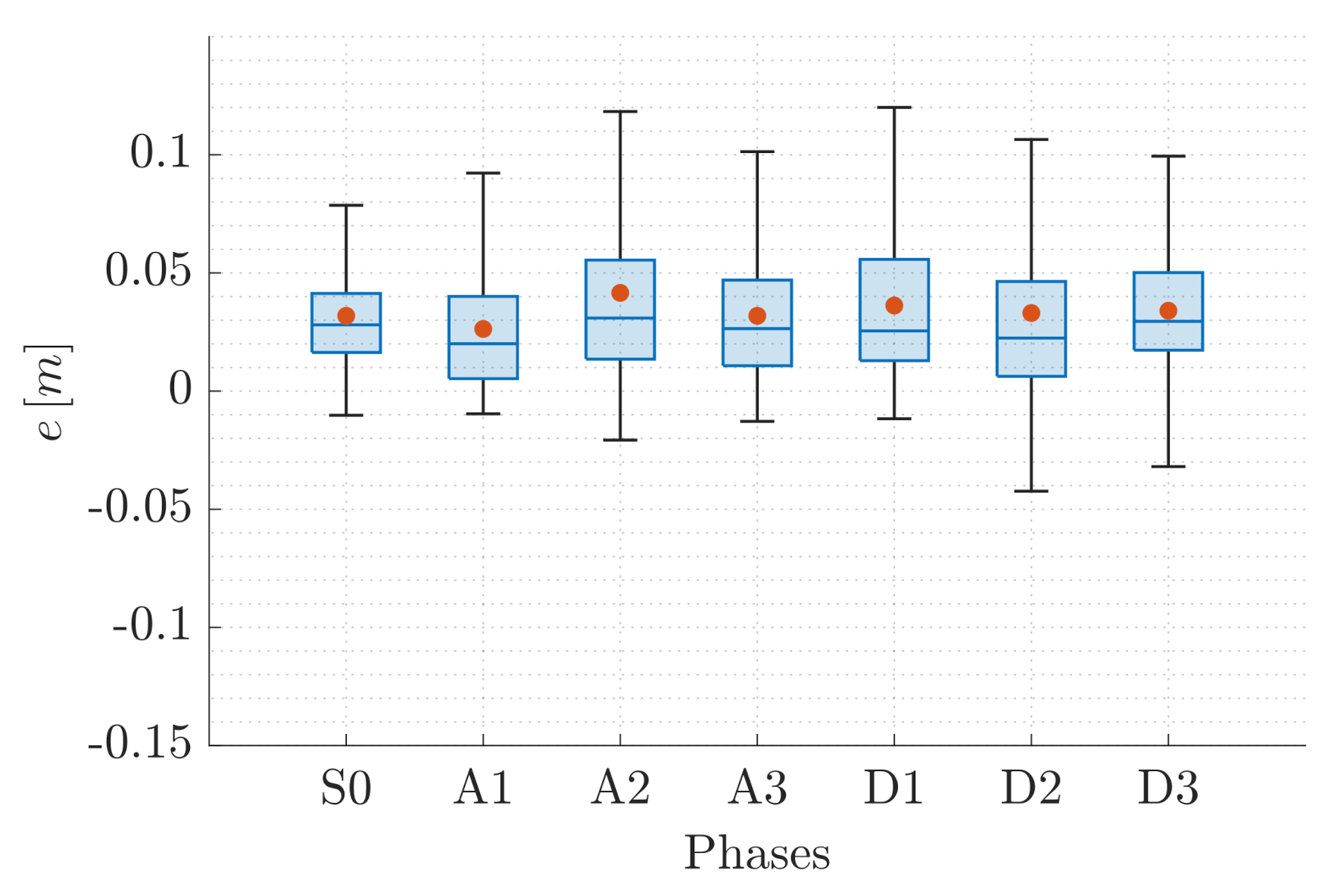
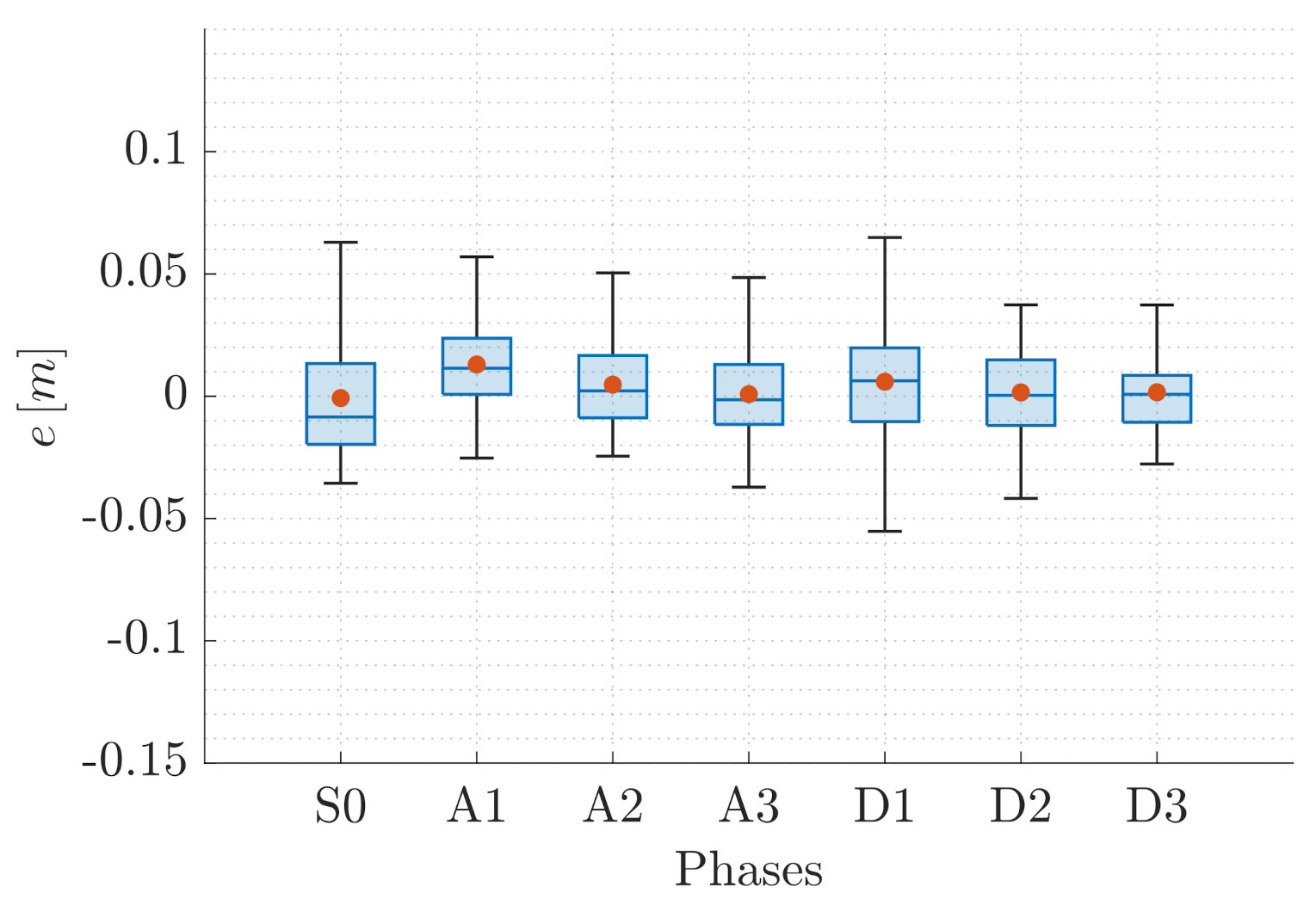
4.3.2. T2: Vertical Steps Trajectory
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hamandi, M.; Usai, F.; Sablé, Q.; Staub, N.; Tognon, M.; Franchi, A. Design of Multirotor Aerial Vehicles: A Taxonomy Based on Input Allocation. Int. J. Robot. Res. 2021, 40, 1015–1044. [Google Scholar] [CrossRef]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design challenges of multi-UAV systems in cyber-physical applications: A comprehensive survey and future directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef] [Green Version]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Dastgheibifard, S.; Asnafi, M. A review on potential applications of unmanned aerial vehicle for construction industry. Sustain. Struct. Mater. 2018, 1, 44–53. [Google Scholar]
- Zhang, J.; Huang, H. Occlusion-aware UAV path planning for reconnaissance and surveillance. Drones 2021, 5, 98. [Google Scholar] [CrossRef]
- Lo, L.Y.; Yiu, C.H.; Tang, Y.; Yang, A.S.; Li, B.; Wen, C.Y. Dynamic Object Tracking on Autonomous UAV System for Surveillance Applications. Sensors 2021, 21, 7888. [Google Scholar] [CrossRef]
- Gu, W.; Hu, D.; Cheng, L.; Cao, Y.; Rizzo, A.; Valavanis, K.P. Autonomous wind turbine inspection using a quadrotor. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 709–715. [Google Scholar]
- Suarez, A.; Caballero, A.; Garofano, A.; Sanchez-Cuevas, P.J.; Heredia, G.; Ollero, A. Aerial manipulator with rolling base for inspection of pipe arrays. IEEE Access 2020, 8, 162516–162532. [Google Scholar] [CrossRef]
- Bulunseechart, T.; Smithmaitrie, P. A method for UAV multi-sensor fusion 3D-localization under degraded or denied GPS situation. J. Unmanned Veh. Syst. 2018, 6, 155–176. [Google Scholar] [CrossRef]
- Goforth, H.; Lucey, S. GPS-denied UAV localization using pre-existing satellite imagery. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 2974–2980. [Google Scholar]
- Balaji, N.; Kothari, M.; Abhishek, A. GPS Denied Localization and Magnetometer-Free Yaw Estimation for Multi-rotor UAVs. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 983–990. [Google Scholar]
- Lissandrini, N.; Michieletto, G.; Antonello, R.; Galvan, M.; Franco, A.; Cenedese, A. Cooperative optimization of UAVs formation visual tracking. Robotics 2019, 8, 52. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Moon, J.; Kim, S. UWB-based Multiple UAV Control System for Indoor Ground Vehicle Tracking. In Proceedings of the 2021 IEEE VTS 17th Asia Pacific Wireless Communications Symposium (APWCS), Virtual Conference, 30–31 August 2021; pp. 1–5. [Google Scholar]
- González de Santos, L.M.; Frías Nores, E.; Martínez Sánchez, J.; González Jorge, H. Indoor path-planning algorithm for UAV-based contact inspection. Sensors 2021, 21, 642. [Google Scholar] [CrossRef]
- Sandino, J.; Vanegas, F.; Maire, F.; Caccetta, P.; Sanderson, C.; Gonzalez, F. UAV framework for autonomous onboard navigation and people/object detection in cluttered indoor environments. Remote Sens. 2020, 12, 3386. [Google Scholar] [CrossRef]
- Lieret, M.; Kogan, V.; Döll, S.; Franke, J. Automated in-house transportation of small load carriers with autonomous unmanned aerial vehicles. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1010–1015. [Google Scholar]
- Liu, M.; Cheng, L.; Qian, K.; Wang, J.; Wang, J.; Liu, Y. Indoor acoustic localization: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–24. [Google Scholar] [CrossRef]
- Yang, B.; Yang, E. A survey on radio frequency based precise localisation technology for UAV in GPS-denied environment. J. Intell. Robot. Syst. 2021, 103, 1–30. [Google Scholar] [CrossRef]
- Rahman, A.; Li, T.; Wang, Y. Recent advances in indoor localization via visible lights: A survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Mashood, A.; Dirir, A.; Hussein, M.; Noura, H.; Awwad, F. Quadrotor object tracking using real-time motion sensing. In Proceedings of the 2016 5th International Conference on Electronic Devices, Systems and Applications (ICEDSA), Ras Al Khaimah, United Arab Emirates, 6–8 December 2016; pp. 1–4. [Google Scholar]
- Kalaitzakis, M.; Cain, B.; Carroll, S.; Ambrosi, A.; Whitehead, C.; Vitzilaios, N. Fiducial markers for pose estimation. J. Intell. Robot. Syst. 2021, 101, 1–26. [Google Scholar] [CrossRef]
- Jung, Y.; Bang, H.; Lee, D. Robust marker tracking algorithm for precise UAV vision-based autonomous landing. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 443–446. [Google Scholar]
- Nguyen, P.H.; Kim, K.W.; Lee, Y.W.; Park, K.R. Remote marker-based tracking for UAV landing using visible-light camera sensor. Sensors 2017, 17, 1987. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Xu, Q.; Wang, J. Vision-based autonomous landing of uav on moving platform using a new marker. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 646, p. 012062. [Google Scholar]
- Wang, G.; Liu, Z.; Wang, X. UAV Autonomous Landing using Visual Servo Control based on Aerostack. In Proceedings of the 3rd International Conference on Computer Science and Application Engineering, Sanya, China, 22–24 October 2019; pp. 1–6. [Google Scholar]
- Jiaxin, H.; Yanning, G.; Zhen, F.; Yuqing, G. Vision-based autonomous landing of unmanned aerial vehicles. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 3464–3469. [Google Scholar]
- Kyristsis, S.; Antonopoulos, A.; Chanialakis, T.; Stefanakis, E.; Linardos, C.; Tripolitsiotis, A.; Partsinevelos, P. Towards autonomous modular UAV missions: The detection, geo-location and landing paradigm. Sensors 2016, 16, 1844. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deeds, J.; Engstrom, Z.; Gill, C.; Wood, Z.; Wang, J.; Ahn, I.S.; Lu, Y. Autonomous vision-based target detection using unmanned aerial vehicle. In Proceedings of the 2018 IEEE 61st International Midwest Symposium on Circuits and Systems (MWSCAS), Windsor, ON, Canada, 5–8 August 2018; pp. 1078–1081. [Google Scholar]
- Hinas, A.; Roberts, J.M.; Gonzalez, F. Vision-based target finding and inspection of a ground target using a multirotor UAV system. Sensors 2017, 17, 2929. [Google Scholar] [CrossRef] [Green Version]
- Alsalam, B.H.Y.; Morton, K.; Campbell, D.; Gonzalez, F. Autonomous UAV with vision based on-board decision making for remote sensing and precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar]
- Liang, X.; Chen, G.; Zhao, S.; Xiu, Y. Moving target tracking method for unmanned aerial vehicle/unmanned ground vehicle heterogeneous system based on AprilTags. Meas. Control 2020, 53, 427–440. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Li, Z.; Jiang, J.; Zhao, X. Relative Localization for UAVs Based on April-Tags. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 444–449. [Google Scholar]
- Liang, X.; Chen, G.; Zhao, S.; Tong, G.; Jiang, L.; Zhang, W. Remote Guidance Method of Unmanned Aerial Vehicle Based on Multi-sensors. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 297–302. [Google Scholar]
- Mohammadi, A.; Feng, Y.; Zhang, C.; Rawashdeh, S.; Baek, S. Vision-based Autonomous Landing Using an MPC-controlled Micro UAV on a Moving Platform. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 771–780. [Google Scholar]
- Feng, Y.; Zhang, C.; Baek, S.; Rawashdeh, S.; Mohammadi, A. Autonomous landing of a UAV on a moving platform using model predictive control. Drones 2018, 2, 34. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, S.A.; Haghbayan, M.H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A survey on odometry for autonomous navigation systems. IEEE Access 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Wu, Y.; Niu, X.; Du, J.; Chang, L.; Tang, H.; Zhang, H. Artificial Marker and MEMS IMU-Based Pose Estimation Method to Meet Multirotor UAV Landing Requirements. Sensors 2019, 19, 5428. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; She, H.; Si, W. Autonomous landing of multi-rotors UAV with monocular gimbaled camera on moving vehicle. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 408–412. [Google Scholar]
- Phang, S.K.; Chen, X. Autonomous tracking and landing on moving ground vehicle with multi-rotor UAV. J. Eng. Sci. Technol. (JESTEC) 2021, 16, 2795–2815. [Google Scholar]
- Li, Z.; Chen, Y.; Lu, H.; Wu, H.; Cheng, L. Uav autonomous landing technology based on apriltags vision positioning algorithm. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8148–8153. [Google Scholar]
- Araar, O.; Aouf, N.; Vitanov, I. Vision based autonomous landing of multirotor UAV on moving platform. J. Intell. Robot. Syst. 2017, 85, 369–384. [Google Scholar] [CrossRef]
- Zhenglong, G.; Qiang, F.; Quan, Q. Pose estimation for multicopters based on monocular vision and AprilTag. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4717–4722. [Google Scholar]
- Nahangi, M.; Heins, A.; McCabe, B.; Schoellig, A. Automated localization of UAVs in GPS-denied indoor construction environments using fiducial markers. In Proceedings of the ISARC. Proceedings of the International Symposium on Automation and Robotics in Construction; IAARC Publications: Taipei, Taiwan, 2018; Volume 35, pp. 1–7. [Google Scholar]
- Kayhani, N.; Heins, A.; Zhao, W.; Nahangi, M.; McCabe, B.; Schoelligb, A.P. Improved tag-based indoor localization of UAVs using extended Kalman filter. In Proceedings of the ISARC. International Symposium on Automation and Robotics in Construction, Banff, AB, Canada, 21–24 May 2019; pp. 21–24. [Google Scholar]
- Michieletto, G.; Cenedese, A.; Franchi, A. Force-Moment Decoupling and Rotor-Failure Robustness for Star-Shaped Generically-Tilted Multi-Rotors. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 2132–2137. [Google Scholar]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE(3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
- Michieletto, G.; Cenedese, A.; Zaccarian, L.; Franchi, A. Nonlinear control of multi-rotor aerial vehicles based on the zero-moment direction. IFAC-PapersOnLine 2017, 50, 13144–13149. [Google Scholar] [CrossRef]
- Krogius, M.; Haggenmiller, A.; Olson, E. Flexible layouts for fiducial tags. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1898–1903. [Google Scholar]
- Raspberry Pi. Available online: https://www.raspberrypi.com (accessed on 7 July 2022).
- Using the ECL EKF. Available online: https://docs.px4.io/v1.12/en/advanced_config/tuning_the_ecl_ekf.html (accessed on 7 July 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | |||||
|---|---|---|---|---|---|
| F | R | B | L | ||
| QR01 | |||||
| HR01 | |||||
| Phase | ||||||||
|---|---|---|---|---|---|---|---|---|
| S0 | A1 | A2 | A3 | D1 | D2 | D3 | ||
| QR01 | ||||||||
| HR01 | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bertoni, M.; Michieletto, S.; Oboe, R.; Michieletto, G. Indoor Visual-Based Localization System for Multi-Rotor UAVs. Sensors 2022, 22, 5798. https://doi.org/10.3390/s22155798
Bertoni M, Michieletto S, Oboe R, Michieletto G. Indoor Visual-Based Localization System for Multi-Rotor UAVs. Sensors. 2022; 22(15):5798. https://doi.org/10.3390/s22155798
Chicago/Turabian StyleBertoni, Massimiliano, Stefano Michieletto, Roberto Oboe, and Giulia Michieletto. 2022. "Indoor Visual-Based Localization System for Multi-Rotor UAVs" Sensors 22, no. 15: 5798. https://doi.org/10.3390/s22155798