
Dir-MUSIC Algorithm for DOA Estimation of Partial Discharge Based on Signal Strength Represented by Antenna Gain Array Manifold

Abstract
:1. Introduction
2. Dir-MUSIC Algorithm
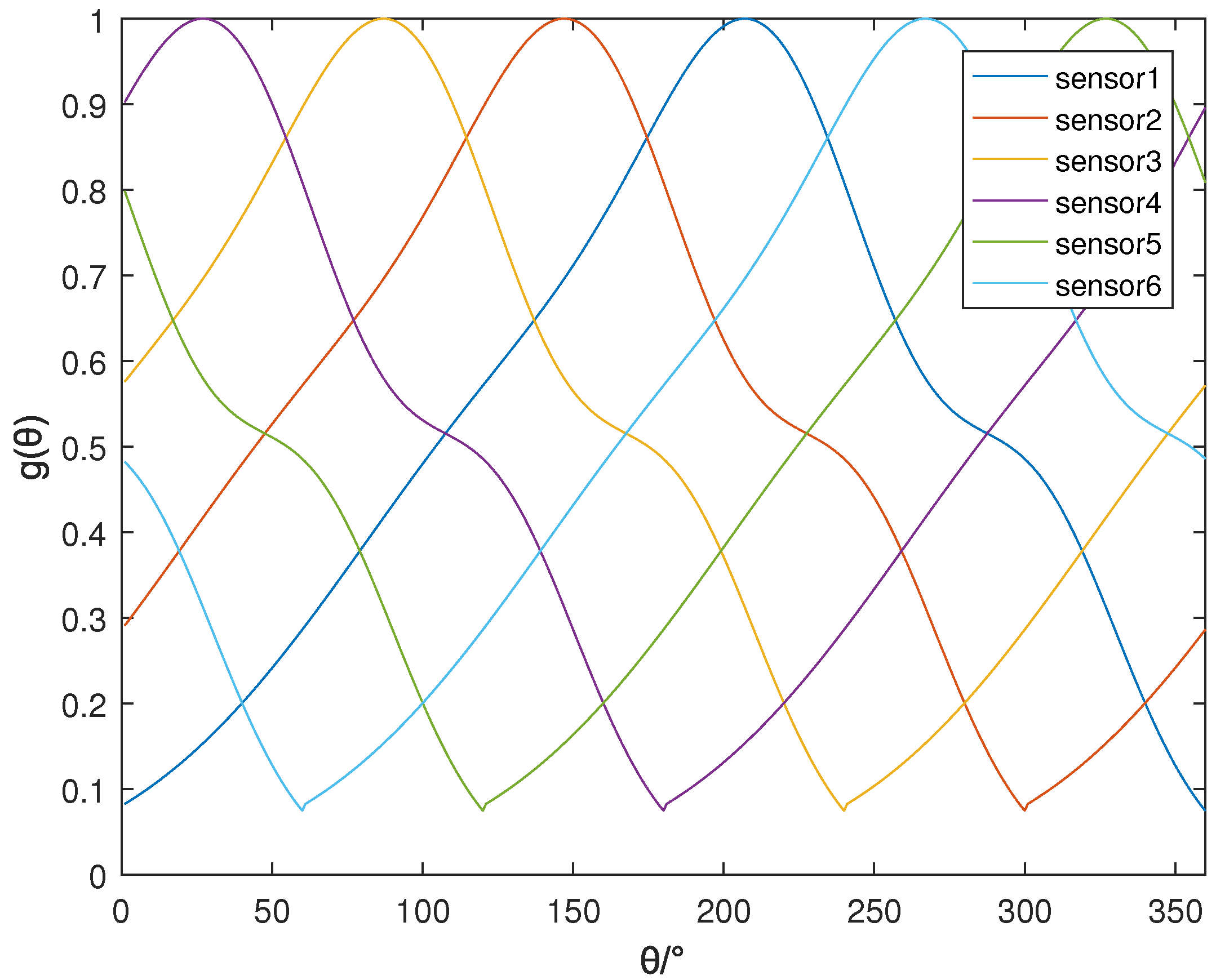
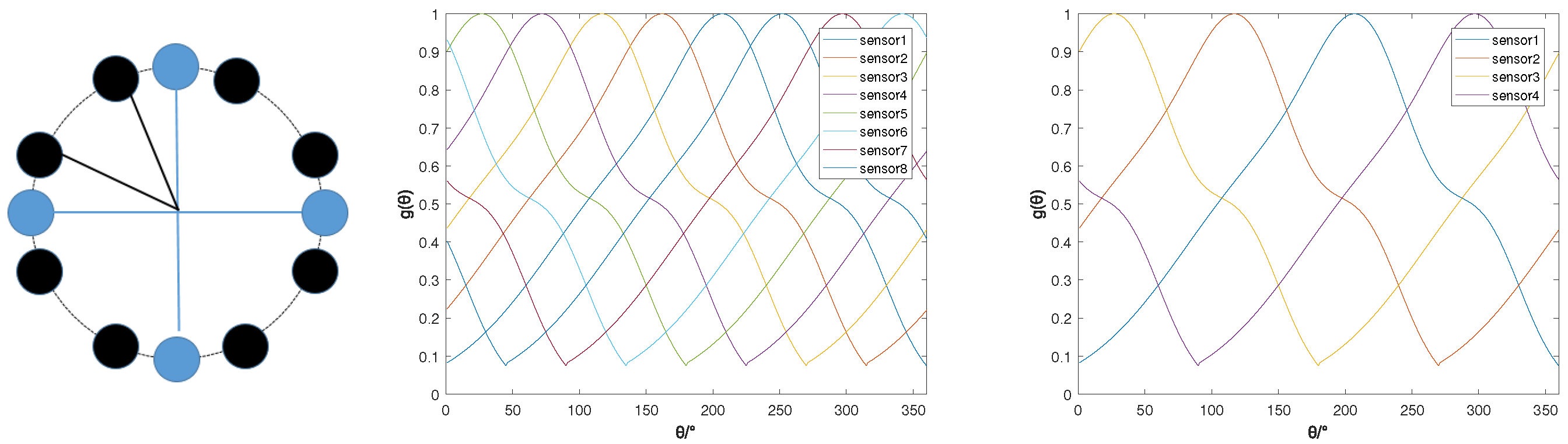
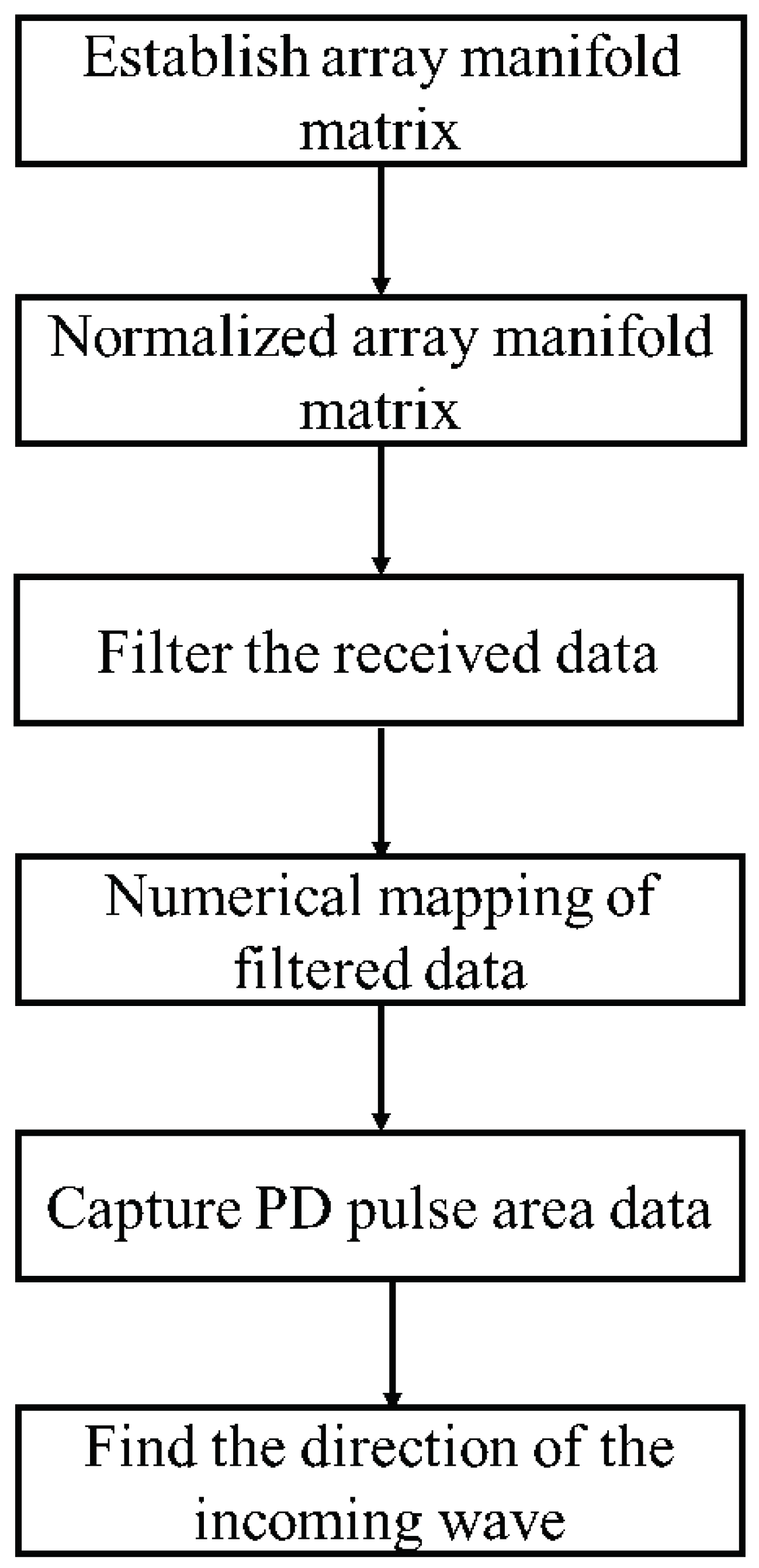
2.1. Derivation
2.2. CRLB of the Direction Estimation
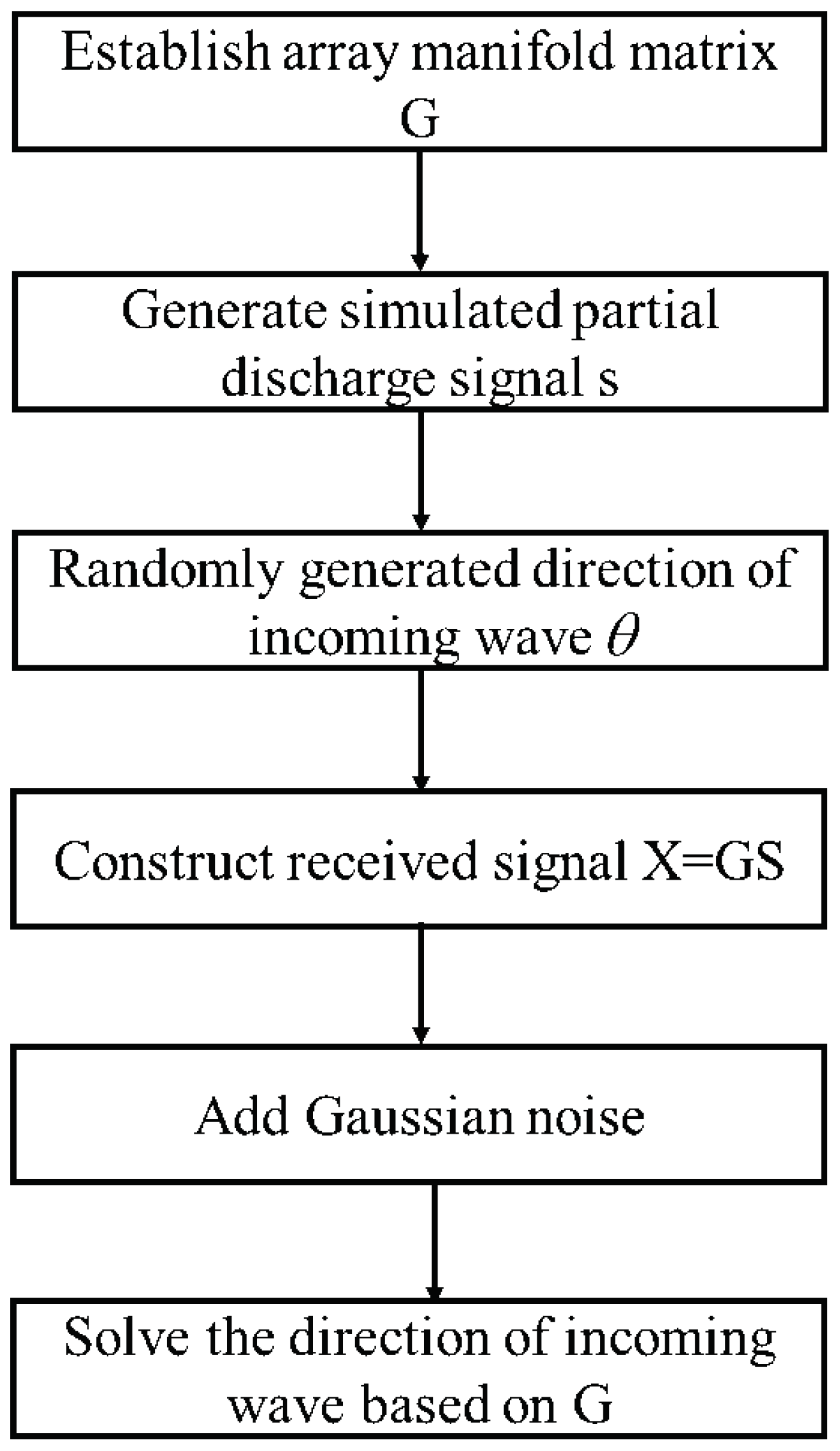
3. Simulation Research on Algorithm Performance
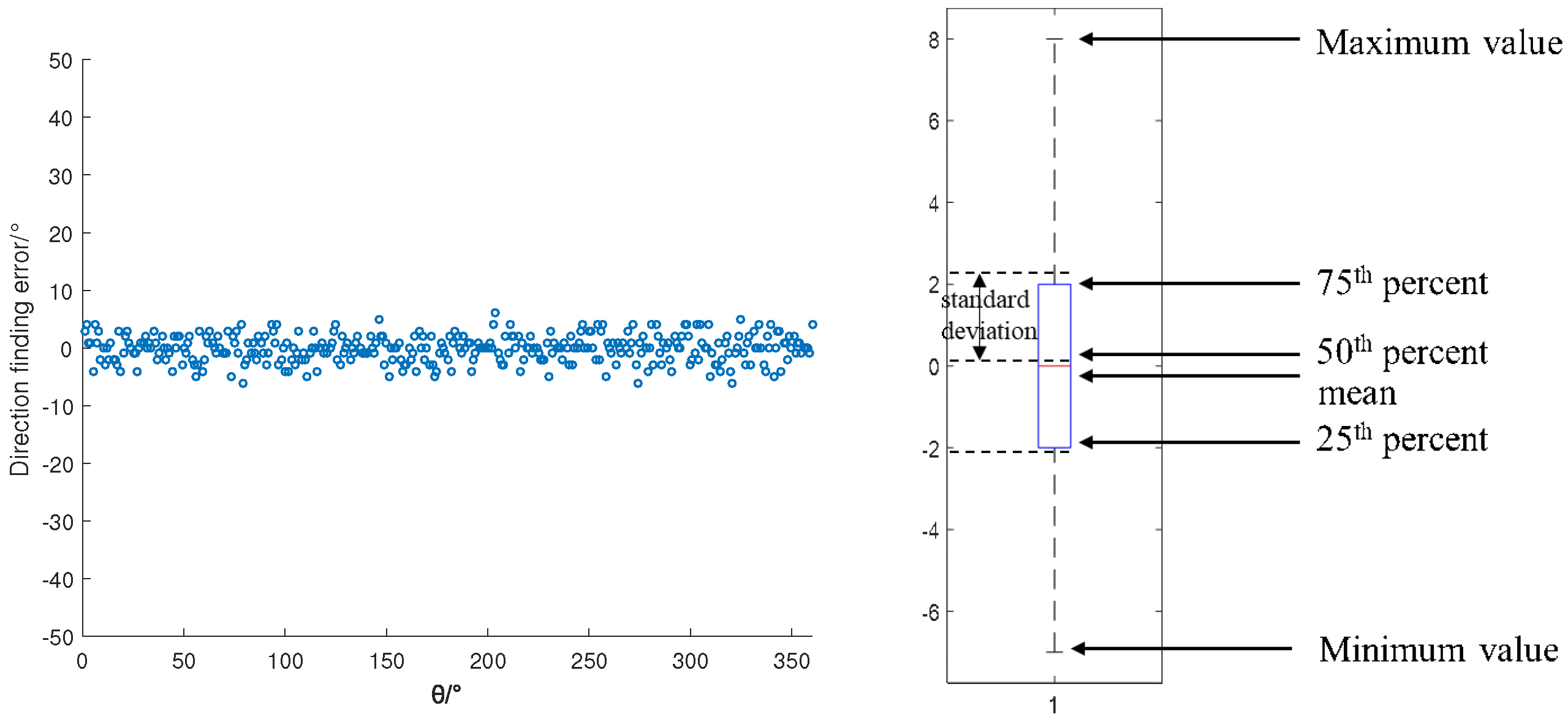
3.1. Relation between Incoming Wave Direction Estimation and SNR
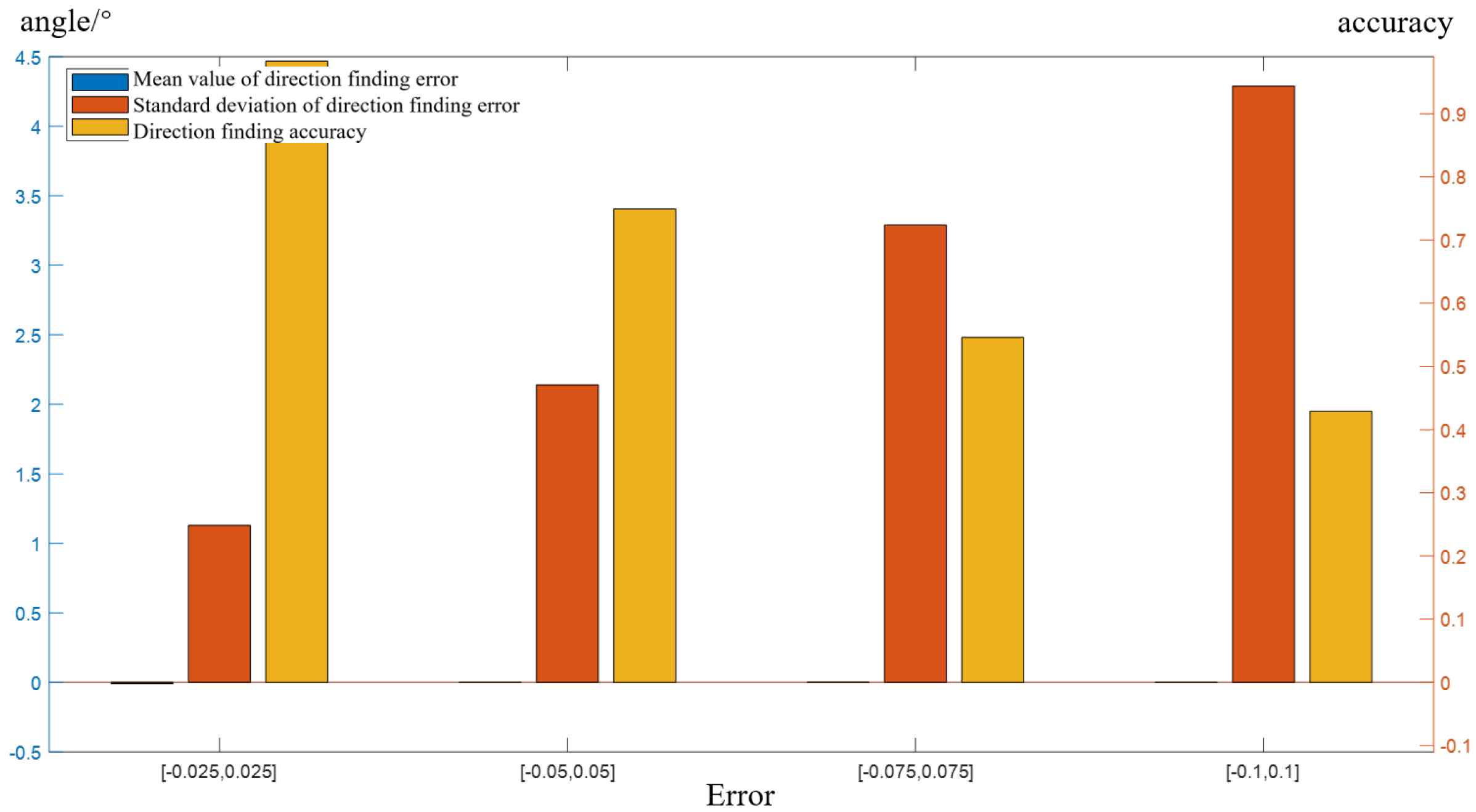
3.2. Research on Direction-Finding Performance under the Condition of Array Manifold Error
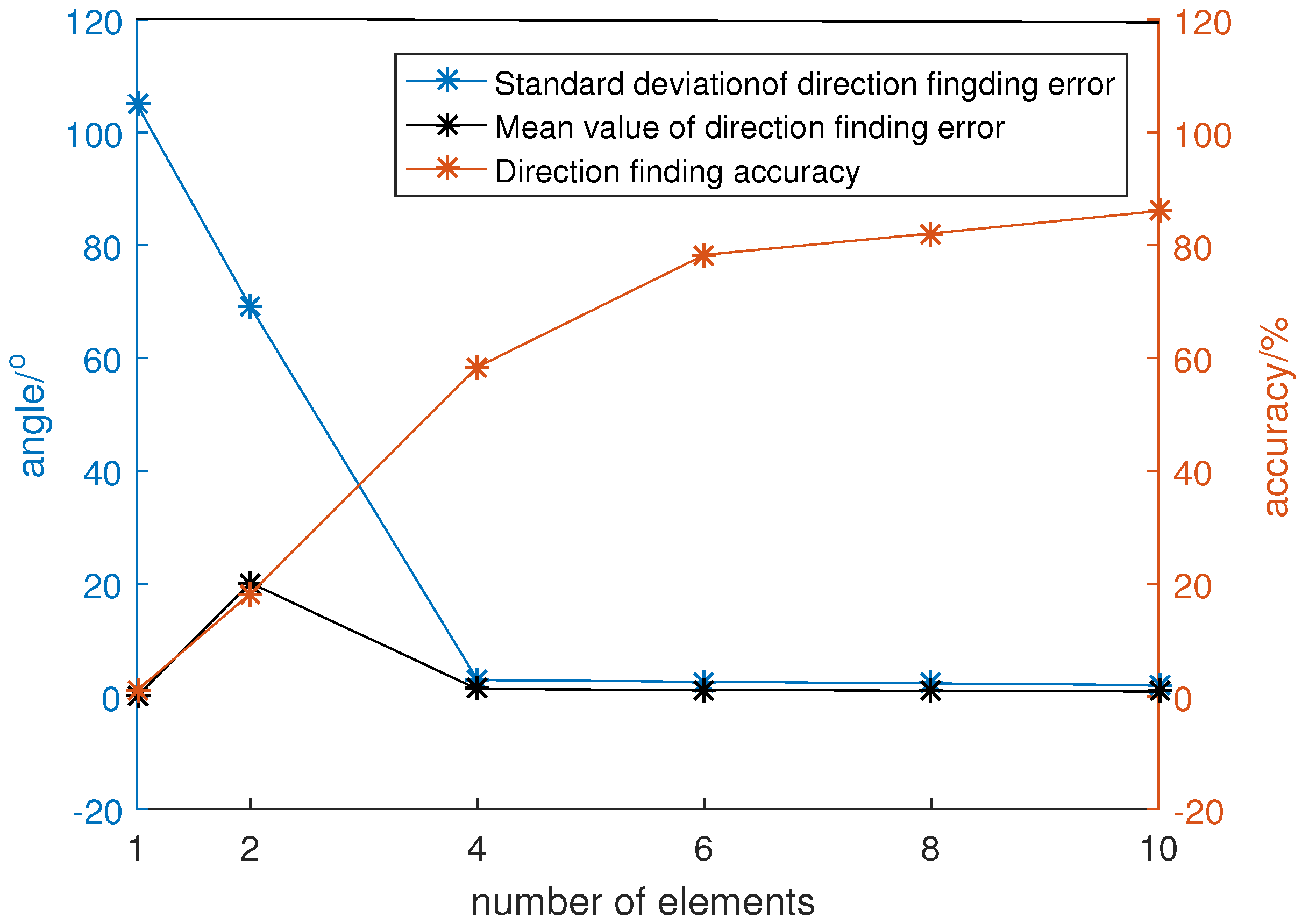
3.3. Relation between Incoming Wave Direction Estimation and Number of Array Element
3.4. Comparison with the Method Based on Phase Information
4. Experimental System Construction and Positioning Test
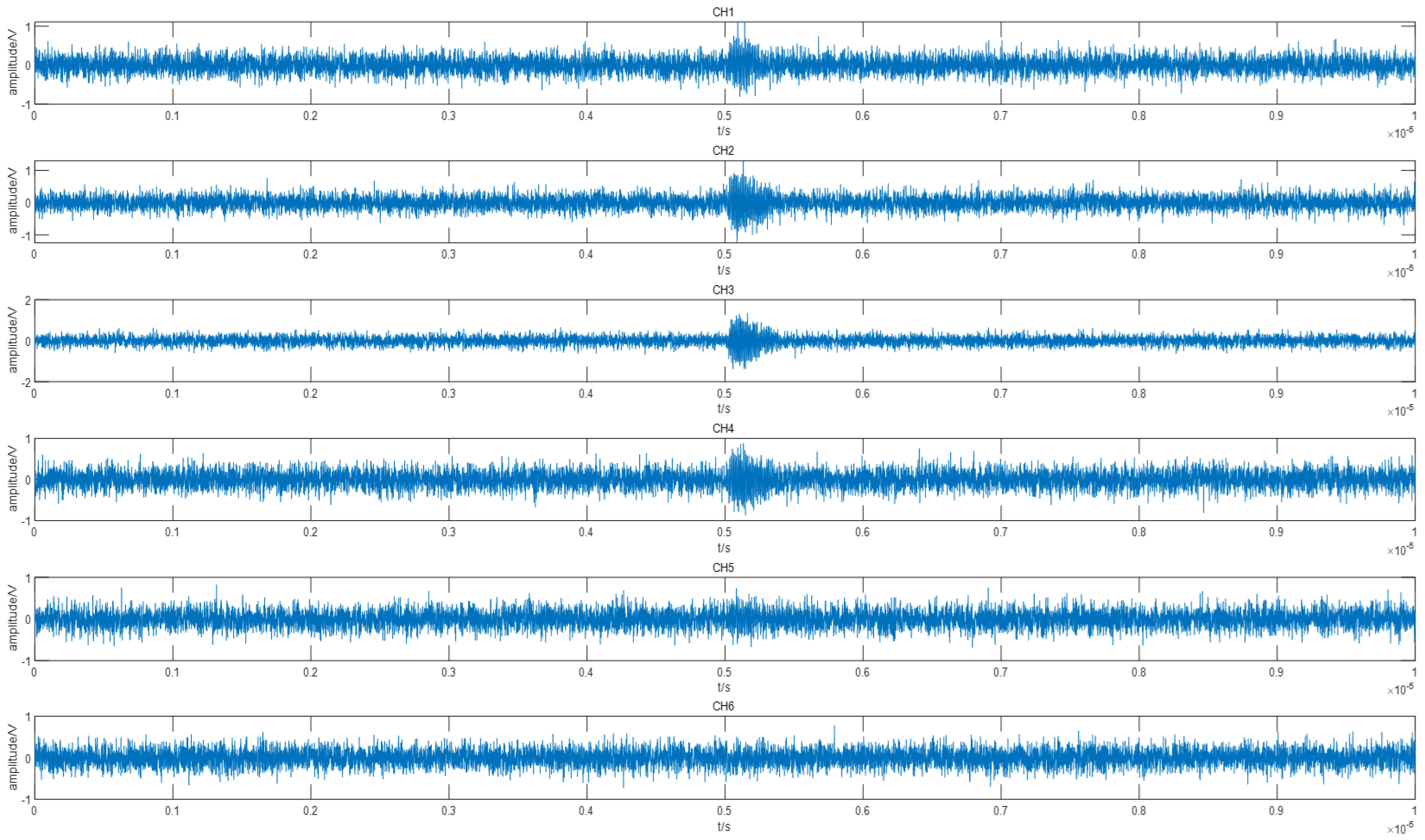
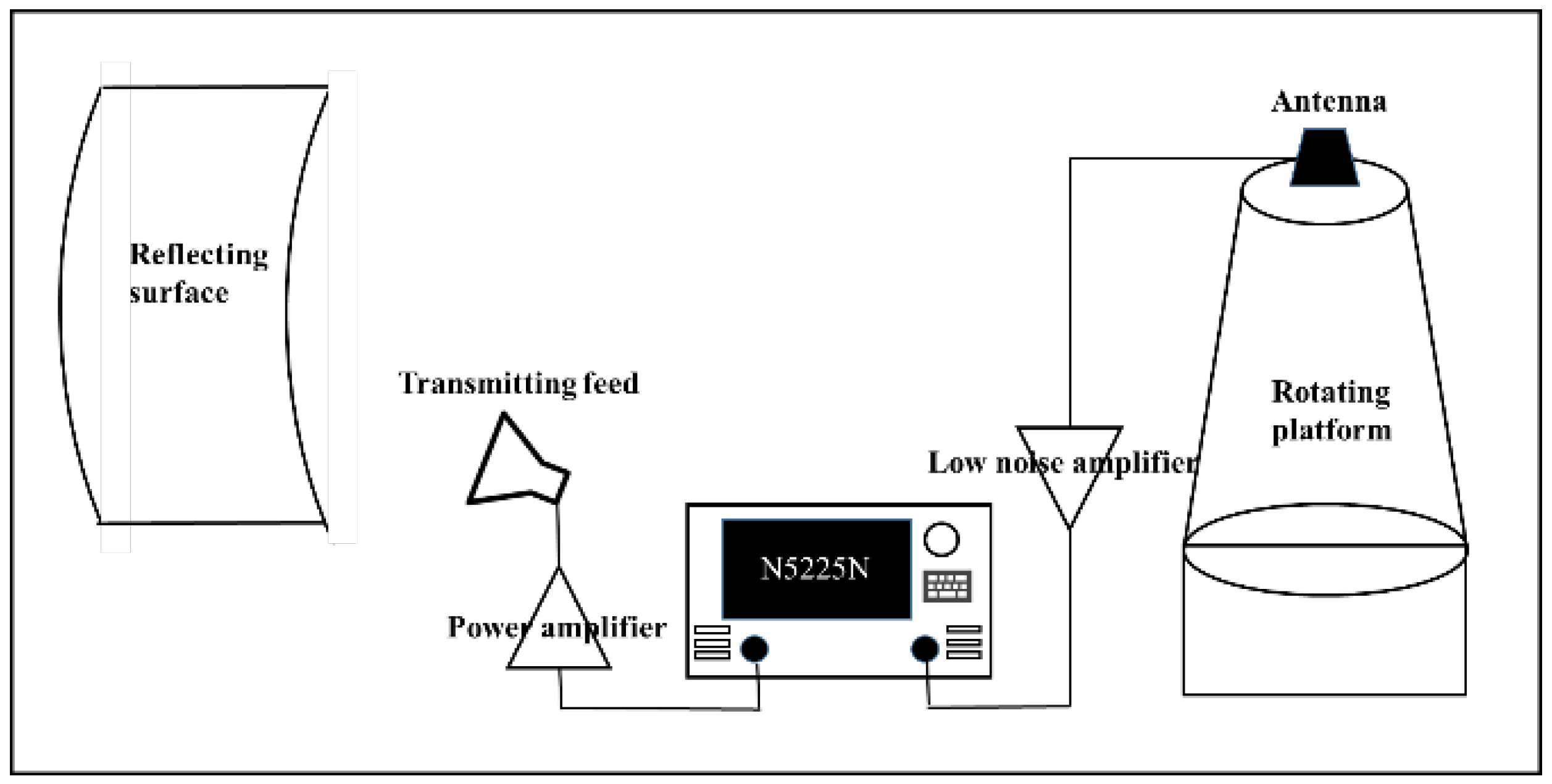
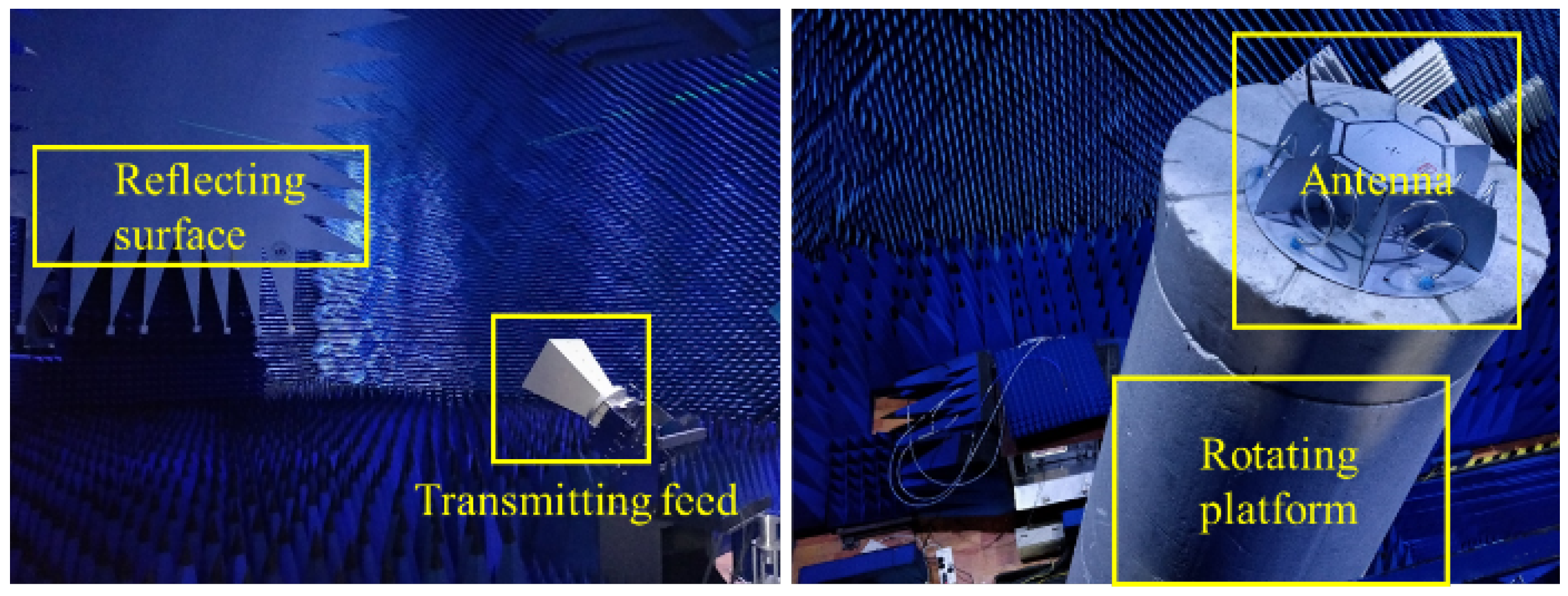
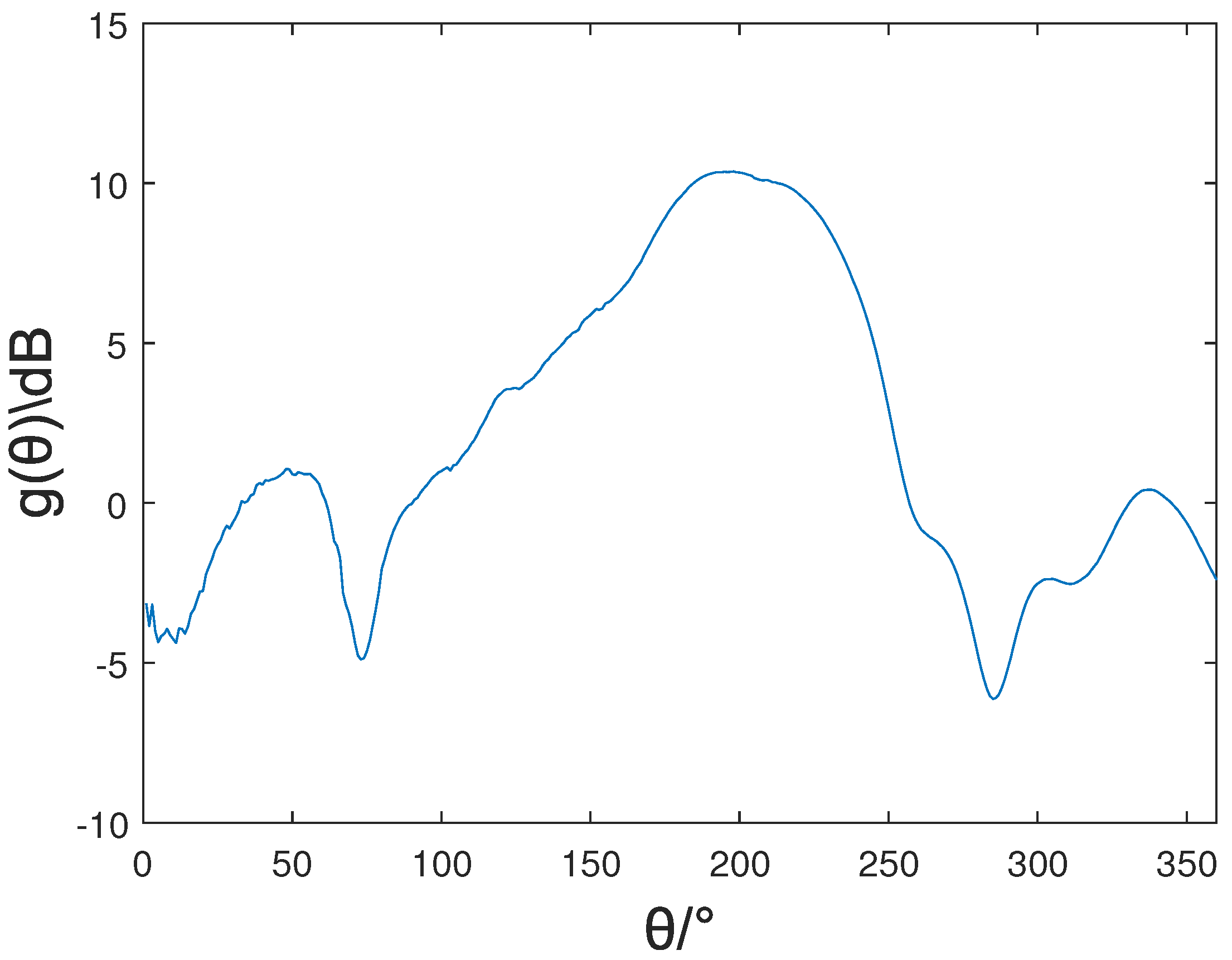
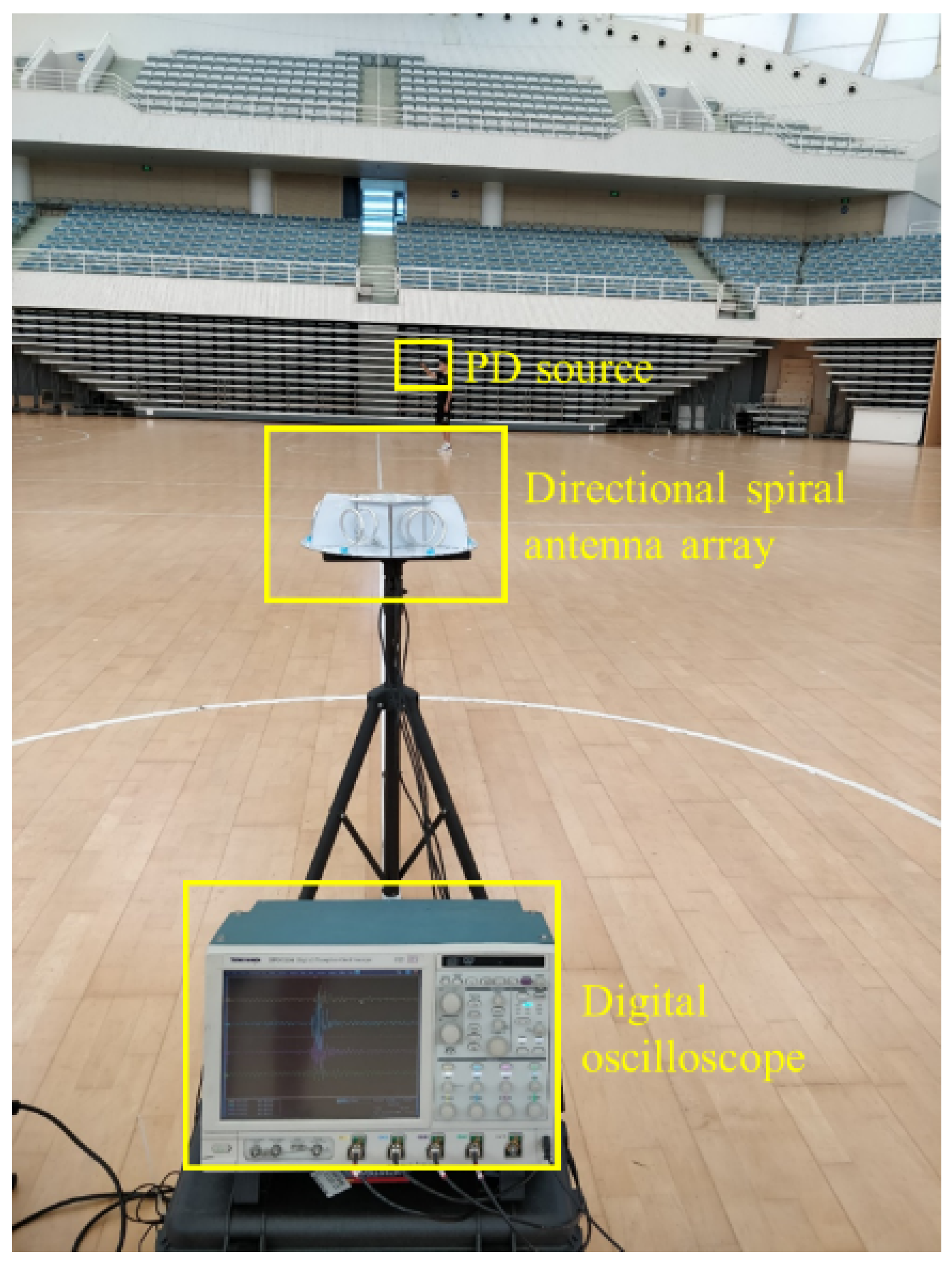
4.1. Experimental System Construction
4.2. Positioning Experiment
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Robles, G.; Fresno, J.M.; Sánchez-Fernández, M.; Martínez-Tarifa, J.M. Antenna Deployment for the Localization of Partial Discharges in Open-Air Substations. Sensors 2016, 16, 541. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Han, X.; Yao, X. A Partial Discharge Detection Method for SF6 Insulated Inverted Current Transformers Adopting Inner Shield Case as UHF Sensor. IEEE Trans. Power Deliv. 2018, 33, 3237–3239. [Google Scholar] [CrossRef]
- Moore, P.J.; Portugues, I.E.; Glover, I.A. Radiometric location of partial discharge sources on energized high-Voltage plant. IEEE Trans. Power Deliv. 2005, 20, 2264–2272. [Google Scholar] [CrossRef]
- Zhang, F.; Wei, B.; Liang, B.; Wang, H.; Wang, B.; Feng, G. Simulation comparison of SSE and TDOA methods for UHF direction finding of partial discharge in substation area. Energy Rep. 2020, 6, 416–423. [Google Scholar] [CrossRef]
- Li, J.; Han, X.; Liu, Z.; Yao, X. A Novel GIS Partial Discharge Detection Sensor with Integrated Optical and UHF Methods. IEEE Trans. Power Deliv. 2018, 33, 2047–2049. [Google Scholar] [CrossRef]
- Markalous, S.M.; Tenbohlen, S.; Feser, K. Detection and location of partial discharges in power transformers using acoustic and electromagnetic signals. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 1576–1583. [Google Scholar] [CrossRef]
- Ha, S.; Cho, J.; Lee, J. Numerical Study of Estimating the Arrival Time of UHF Signals for Partial Discharge Localization in a Power Transformer. J. Electromagn. Eng. Sci. 2018, 18, 94–100. [Google Scholar] [CrossRef]
- Li, Z.; Luo, L.; Sheng, G.; Liu, Y.; Jiang, X. UHF partial discharge location method in substation based on dimension-reduced RSSI fingerprint. Iet Gener. Transm. Distrib. 2018, 12, 398–405. [Google Scholar] [CrossRef]
- Desai, B.M.A.; Sarathi, R. Identification and localisation of incipient discharges in transformer insulation adopting UHF technique. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 1924–1931. [Google Scholar] [CrossRef]
- Polak, F.; Sikorski, W.; Siodla, K. Location of partial discharges sources using sensor arrays. In Proceedings of the International Conference on High Voltage Engineering and Application, Poznan, Poland, 8–11 September 2014; pp. 1–4. [Google Scholar]
- Huang, J.; Wang, J.; Tan, Y.; Wu, D.; Cao, Y. An Automatic Analog Instrument Reading System Using Computer Vision and Inspection Robot. IEEE Trans. Instrum. Meas. 2020, 69, 6322–6335. [Google Scholar] [CrossRef]
- Cho, K.H.; Kim, H.M.; Jin, Y.H.; Liu, F.; Moon, H.; Koo, J.C.; Choi, H.R. Inspection Robot for Hanger Cable of Suspension Bridge: Mechanism Design and Analysis. IEEE/ASME Trans. Mechatronics 2013, 18, 1665–1674. [Google Scholar] [CrossRef]
- Katrasnik, J.; Pernus, F.; Likar, B. A Survey of Mobile Robots for Distribution Power Line Inspection. IEEE Trans. Power Deliv. 2010, 25, 485–493. [Google Scholar] [CrossRef]
- Lorenz, R.G.; Boyd, S.P. Robust minimum variance beam forming. IEEE Trans. Signal Process. 2005, 53, 1684–1696. [Google Scholar] [CrossRef] [Green Version]
- Richmond, C.D. Capon–Bartlett cross-spectrum and a perspective on robust adaptive filtering. Signal Process. 2020, 171, 107473. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Forster, P.; Ginolhac, G.; Boizard, M. Derivation of the theoretical performance of a Tensor MUSIC algorithm. Signal Process. 2016, 129, 97–105. [Google Scholar] [CrossRef] [Green Version]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 1176, 032001. [Google Scholar] [CrossRef]
- Rao, B.D.; Hari, K.V.S. Performance analysis of Root-Music. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Rangarao, K.V.; Venkatanarasimhan, S. gold-MUSIC: A Variation on MUSIC to Accurately Determine Peaks of the Spectrum. IEEE Trans. Antennas Propag. 2013, 61, 2263–2268. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, J.; Fang, W. Joint estimation of DOA and delay using TST-MUSIC in a wireless channel. IEEE Signal Process. Lett. 2001, 8, 58–60. [Google Scholar] [CrossRef]
- Yan, F.; Jin, M.; Qiao, X. Low-Complexity DOA Estimation Based on Compressed MUSIC and Its Performance Analysis. IEEE Trans. Signal Process. 2013, 61, 1915–1930. [Google Scholar] [CrossRef]
- Lin, J.D.; Fang, W.H.; Wang, Y.Y.; Chen, J.T. FSF MUSIC for Joint DOA and Frequency Estimation and Its Performance Analysis. IEEE Trans. Signal Process. 2006, 54, 4529–4542. [Google Scholar] [CrossRef]
- Gunjal, M.M.; Raj, A.A.B. Improved Direction of Arrival Estimation Using Modified Music Algorithm. In Proceedings of the International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 10–12 June 2020; pp. 249–254. [Google Scholar]
- Liu, Q.; Zhu, M.X.; Wang, Y.B.; Deng, J.B.; Li, Y.; Zhang, G.J.; Zhao, X.F. UHF antenna array arrangement optimization for partial discharge direction finding in air-insulted substation based on phased array theory. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 3657–3668. [Google Scholar] [CrossRef]
- Pang, X.; Wu, H.; Li, X.; Qi, Y.; Jing, H.; Zhang, J.; Xie, Q. Partial discharge ultrasonic detection based on EULER-MUSIC algorithm and conformal array sensor. IET Gener. Transm. Distrib. 2018, 12, 3596–3605. [Google Scholar] [CrossRef]
- Li, Q.; Wang, N.; Yi, D. Numerical Analysis; Tsinghua University Press: Beijing, China, 2001; pp. 52–58. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | 10 | 5 | 0 | −5 | −10 |
|---|---|---|---|---|---|
| Accuracy | 100% | 100% | 100% | 99.17% | 72.78% |
| SNR | 10 | 5 | 0 | −5 | −10 |
|---|---|---|---|---|---|
| Accuracy | 100% | 100% | 98.17% | 85.62% | 47.67% |
| SNR | 10 | 5 | 0 | −5 | −10 |
|---|---|---|---|---|---|
| Accuracy of the proposed method | 100% | 100% | 100% | 99.17% | 72.78% |
| Accuracy of the phase method | 100% | 100% | 97.44% | 76.75% | 39.00% |
| Sample Rate | 1 G | 500 M | 100 M |
|---|---|---|---|
| Accuracy of the proposed method | 100% | 91.64% | 79.97% |
| Accuracy of the phase method | 97.22% | 72.33% | 56.25% |
| Real PD Coordinates | Mean of Calculated Angle | Mean of Angle Error | Standard Deviation of Angle Error |
|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Chen, B.; Li, Y.; Hu, Y.; Li, J.; Zeng, Z. Dir-MUSIC Algorithm for DOA Estimation of Partial Discharge Based on Signal Strength Represented by Antenna Gain Array Manifold. Sensors 2022, 22, 5406. https://doi.org/10.3390/s22145406
Xu W, Chen B, Li Y, Hu Y, Li J, Zeng Z. Dir-MUSIC Algorithm for DOA Estimation of Partial Discharge Based on Signal Strength Represented by Antenna Gain Array Manifold. Sensors. 2022; 22(14):5406. https://doi.org/10.3390/s22145406
Chicago/Turabian StyleXu, Wencong, Bingshu Chen, Yandong Li, Yue Hu, Jianxun Li, and Zijing Zeng. 2022. "Dir-MUSIC Algorithm for DOA Estimation of Partial Discharge Based on Signal Strength Represented by Antenna Gain Array Manifold" Sensors 22, no. 14: 5406. https://doi.org/10.3390/s22145406