1. Introduction
There are various genres of dance around the world, such as ballet, hip hop, and Japanese dance. Like sports, dance is popular for its strong exercise benefit [
1,
2,
3,
4,
5,
6,
7]. Dance also has artistic aspects linked to the culture of a region and country, and it is effective for revitalizing the community of a local region [
8,
9]. To perfect dance techniques, it is essential for a performer to repeatedly practice choreography composed specifically for a song. In general, the performer practices by getting advice on choreography from an instructor and watching sample videos of the choreography [
10,
11]. However, it is challenging to practice face-to-face because of the spread of COVID-19 infection in recent years. In addition, both the number of instructors and the time available for practice are limited. However, information and communication technology (ICT) and artificial intelligence (AI) technologies can now be used to develop techniques to improve the efficiency of dance practice.
The Yosakoi Soran Festival is a typical Japanese dance event held in Hokkaido. This annual event has an economic effect of more than 20 billion yen (around
$173 million USD) because many tourists visit it (
https://app.yosakoi-soran.jp/news/view/324, accessed on 16 March 2022). Since Yosakoi Soran [
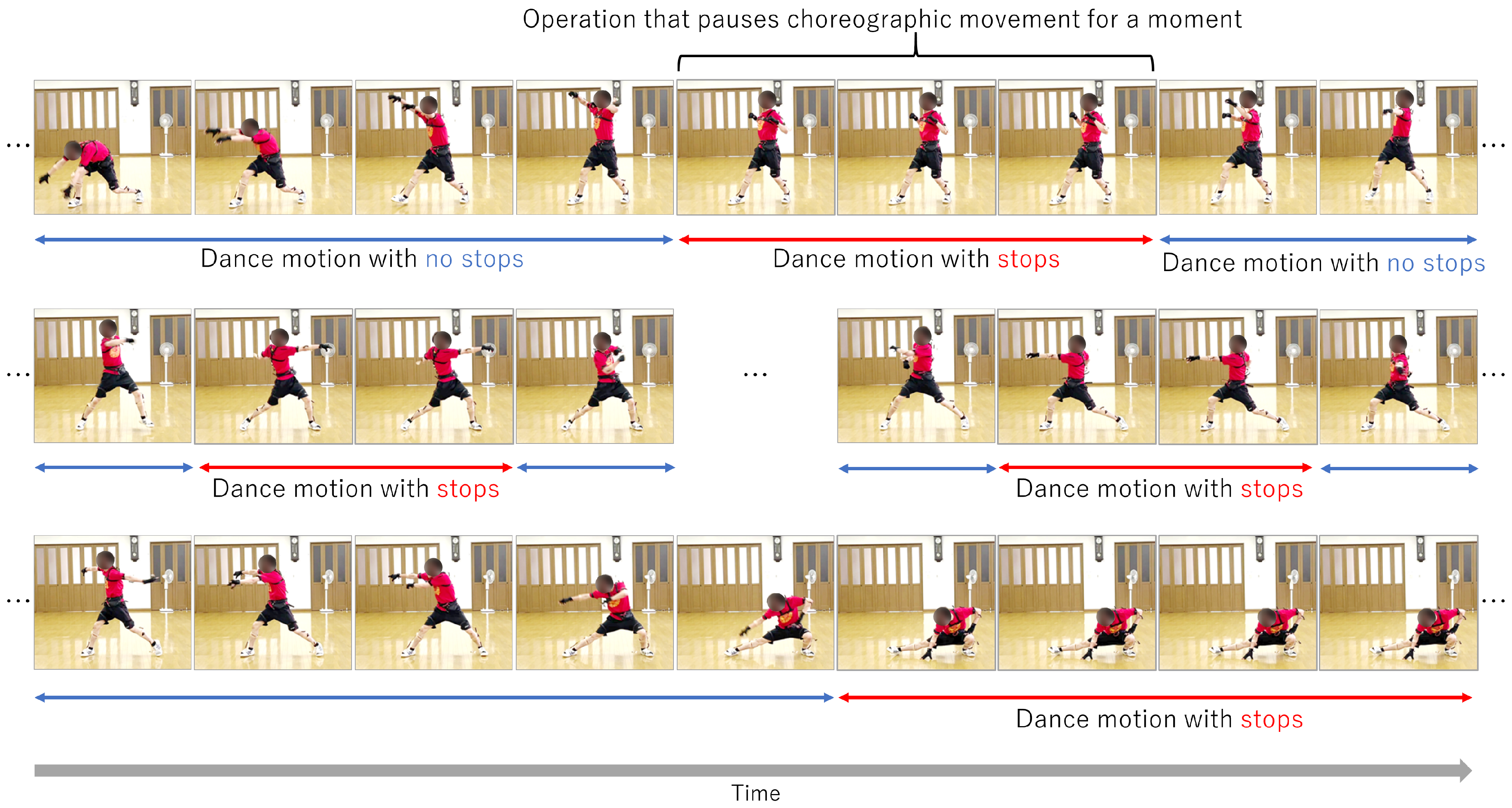
12] is a group dance in which ordinary citizens participate, it is important not only to choreograph individual dances but also to synchronize the troupe members’ movements. In particular, abrupt stops during a dance are important in choreography and are especially important for members of a troupe to synchronize with each other. Abrupt stops are an important component not only of Yosakoi Soran but also in traditional Asian dances in China, India, and elsewhere.
Figure 1 shows how a stop is performed. Although synchronization of stops among troupe members is key to the successful performance of Yosakoi Soran, it is difficult for performers to notice slight differences in timing between themselves and the other performers. Therefore, it is necessary to construct a dance practice system that detects the timing of stops in a remote environment or in an on-demand format. Our proposal supports individual stopping practice and thus can contribute to improving dance skills.
Various researchers have recently proposed analyses of dance movements using motion capture (MoCap) for teaching and training [
13,
14,
15,
16,
17,
18,
19,
20]. Those analyses have focused on the performer’s pose during a dance. In [
13,
14], a dance practice support system using MoCap was developed. MoCap-based systems obtain the dance movements of experts and nonexpert performers, calculate the differences between the two, and feed those differences back to the latter. These studies show the effectiveness of using MoCap to support dance practice. In addition, it has been reported that performers prefer dance practices based on an interactive system rather than conventional practice methods such as watching choreography videos and direct instruction by instructors [
21]. For Yosakoi Soran in particular, an interactive practice system must help performers synchronize their starts and stops with those of the other troupe members. The importance of synchronized stops during a group dance is shown in [
22]. Therefore, it is necessary to analyze the velocities of the joints of a performer during a dance. Moreover, since the choreography of a stop involves the sharpness of movement, analysis focusing on acceleration is also important.
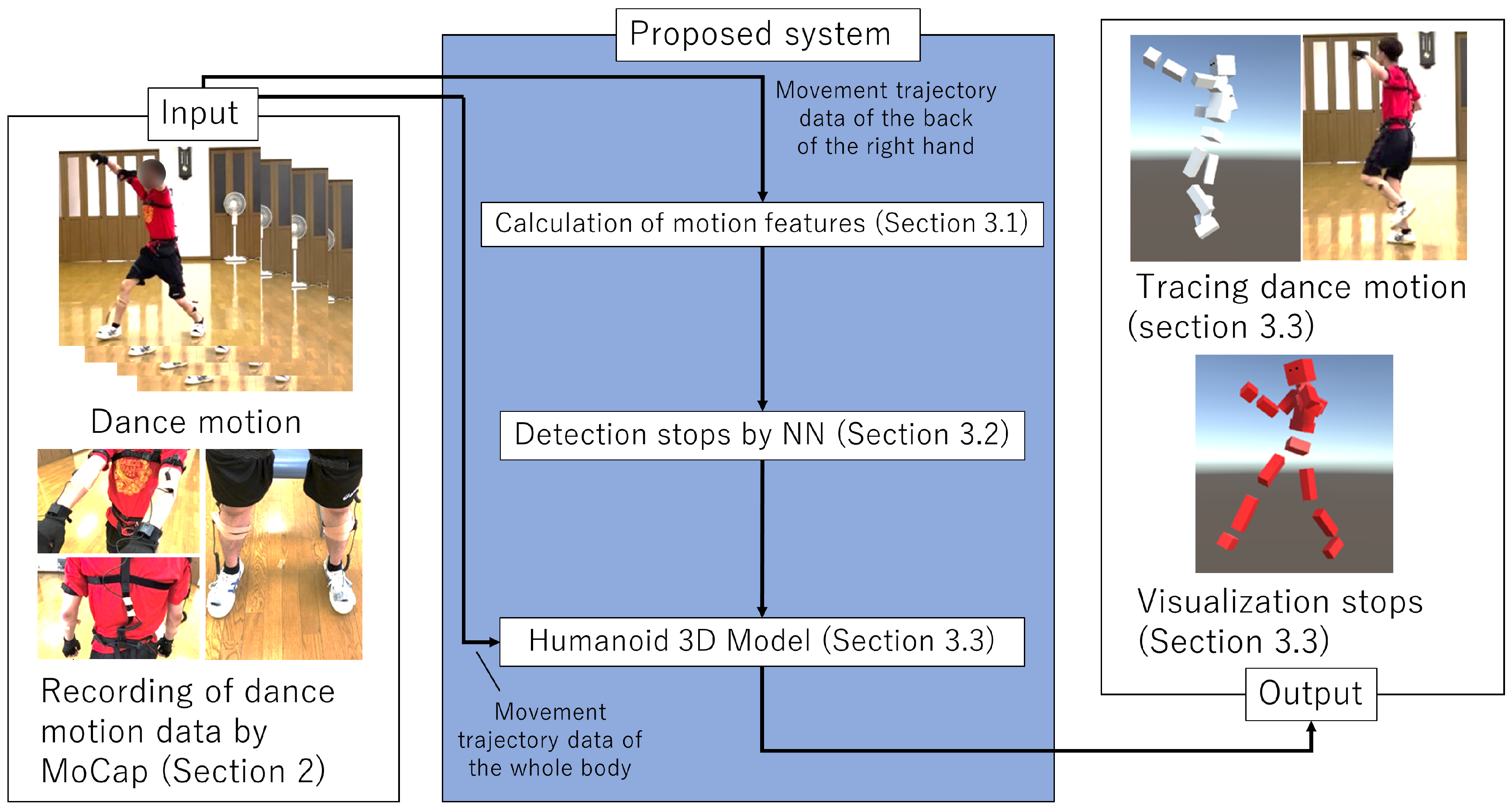
This paper proposes a new stop detection method based on a neural network using a motion sensor’s velocity and the acceleration of joint position. An overview of the proposed method is shown in
Figure 2. First, the motion data of a Yosakoi Soran performer is obtained by using MoCap. Next, motion features based on velocity and acceleration are calculated from the time-series data of the 3D coordinates of the right fist. Then, a stop is detected based on a feedforward neural network (NN) [
23] using those features. Finally, the detected stops are visualized with a 3D humanoid model. The proposed method contributes to the automatic evaluation of Yosakoi Soran movements because it detects the choreographed timing of stops. In addition to streamlining individual repetition practice for Yosakoi Soran, this method is expected to be adapted for various other dance forms that use stops.
This paper is organized as follows. In
Section 2, the measurement method of the dance movement by MoCap is explained. In
Section 3, the proposed method is explained. Specifically, the method for calculating features based on velocity and acceleration from dance motions and the method for visualizing detected stops are described. In
Section 4, the experiments are described. Specifically, the effectiveness of the proposed method is shown by comparing the accuracy of the detection and the visualization of stops between the proposed method and methods for comparison. In
Section 5, the conclusions of this paper and future work are described.
2. Recording of Dance Motion Data by MoCap
In this section, we explain how to record a performer’s motion data by MoCap to detect stops in Yosakoi Soran. Using Perception Neuron 2.0 (
https://www.noitom.com/, accessed on 16 March 2022) (PN), which is NOITOM’s motion capture shown in
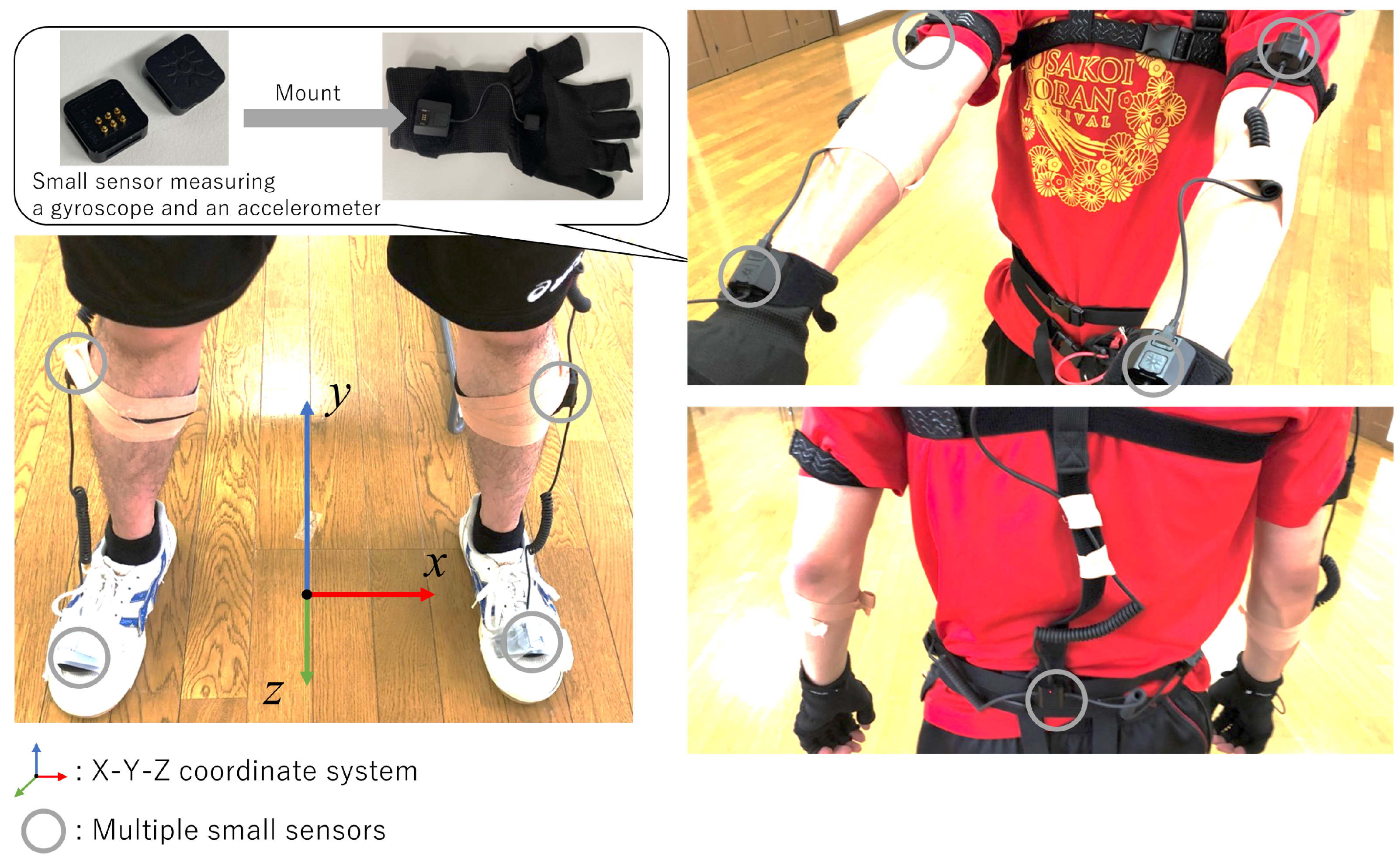
Figure 3, the performer’s dance motion is recorded while the performer wears the MoCap. The MoCap consists of multiple small sensors that measure inertia, such as a gyroscope and an accelerometer. Based on the data acquired from these sensors, the posture and position of the performer are estimated.
There are two main advantages of PN. While PN is less accurate than optical MoCaps in estimating posture and position, PN costs only about 1/100 to 1/1000 the cost of an optical MoCap. From this point of view, the practical application of the proposed system becomes realistic. The other advantage of the proposed system is that it has fewer restrictions on its use. For example, an optical MoCap is highly accurate but requires a dedicated studio with multiple cameras and can measure motion only within a limited area. In contrast, PN can be used anywhere if nearby metal or magnetic objects are kept away. On the other hand, PN has some disadvantages: over a long period, errors in a PN gradually increase due to problems in posture- and position-estimation methods. Moreover, the accuracy of position estimation is low. However, if the PN is calibrated periodically and used in a large space where the influence of electromagnetic waves is minimized, the error can be minimized to the extent possible. Actually, Yosakoi musical pieces are short (about 3–10 min each), so the effect of errors caused by continuous use is considered small. Instead, PN is used to analyze various movements such as surgical simulation [
24] and the analysis of sports movements [
25]. Within this background, we adapt PN for our analysis of dance movement.
In dance, the part of the body that has the widest range of movement is the hand. Therefore, in this study, as shown in
Figure 3, the MoCap is attached to the performer’s hand, and the dance movement, including stops, is recorded. This study describes a method of detecting stops using the movement trajectory data on 3D coordinates of the back of the right hand among the recorded data.
3. Detection and Visualization of Stops by NN Based on Velocity and Acceleration
This section describes the proposed method of detecting stops based on NN and the visualization of detected stops. First, the motion features consist of velocities, and acceleration is calculated using the movement trajectory data of the back of the right hand as recorded by the MoCap.
Section 3.1 describes the method of calculating the motion features of a stop. Then, the detection model is constructed based on NN using those features in
Section 3.2, and
Section 3.3 describes the method of visualizing the detected stops. The details are shown below.
3.1. Calculation of Motion Features
Since stopping is an operation that pauses choreographic movement for a moment, the characteristics of the velocity and acceleration of the hand are calculated. First, we define the movement trajectory data is the number of series of movement loci) of the back of the right hand from MoCap.
3.1.1. Calculation of Velocity
Since the sensor mounted on the MoCap is extremely sensitive, the obtained movement trajectory data contain high-frequency components such as noise. It is desirable to apply smoothing to the movement trajectory data to remove noise in advance because the calculation of velocity and acceleration requires differentiation of the movement trajectory data. Therefore, the moving average processing [
26] is applied to
, as shown in Equation (
1).
where,
n is an arbitrary natural number. Note that
n and the sampling rate of
were empirically set to 5 (i.e., window size being 12) and 60 Hz, respectively, based on prior equipment preparation for data acquisition. Then, the velocity
is calculated by the 5-point approximation formula of the derivative in Equation (
2).
where, although
h is a minute width of differentiation,
is set to obtain the displacement for each frame in this paper. If a high-frequency component is also generated in the calculated velocity
, the velocity
is applied to the subsequent calculation of the acceleration. Therefore, it is necessary to smooth the transition of
. However, the velocity
may change drastically, and if moving average processing is applied, the size characteristics may be impaired. Therefore, the following root mean square
is calculated from the velocity
in Equation (
3).
Then, the one-dimensional velocity
is calculated from the three-dimensional velocity as shown in Equation (
4).
Finally, the change in velocity
is smoothed by reapplying Equation (
2) to the result obtained in Equation (
4). Note that the velocity
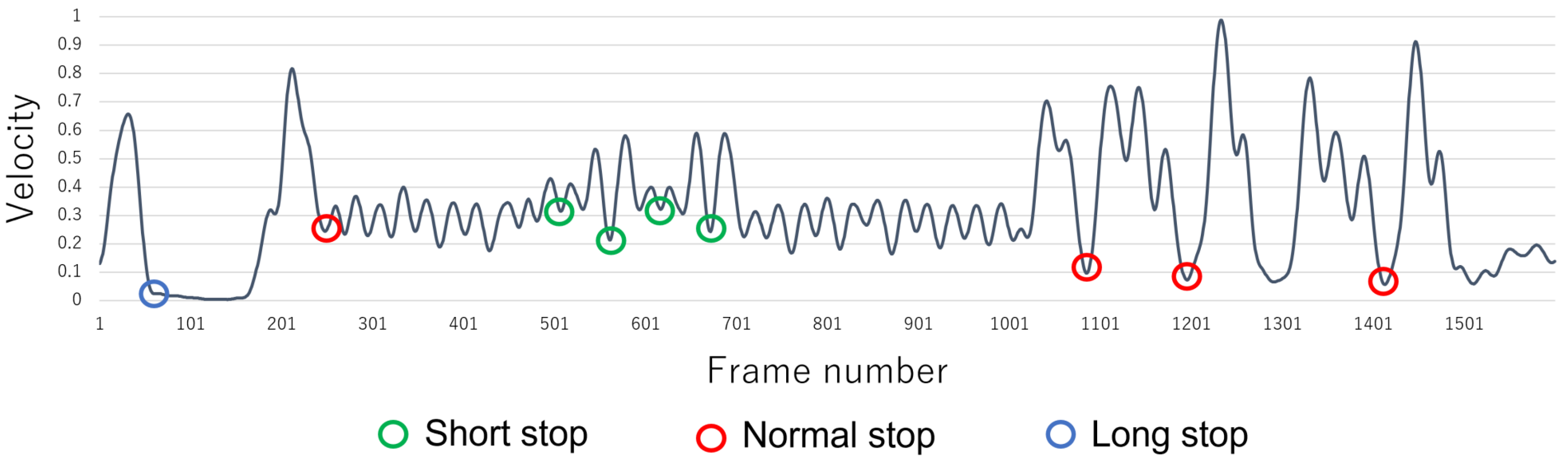
is calculated by normalization in the range of 0 to 1. Moreover, the minimum and maximum values used in normalization are determined independently for each set of motion data acquired from each subject. An example of the calculated velocity
is shown in
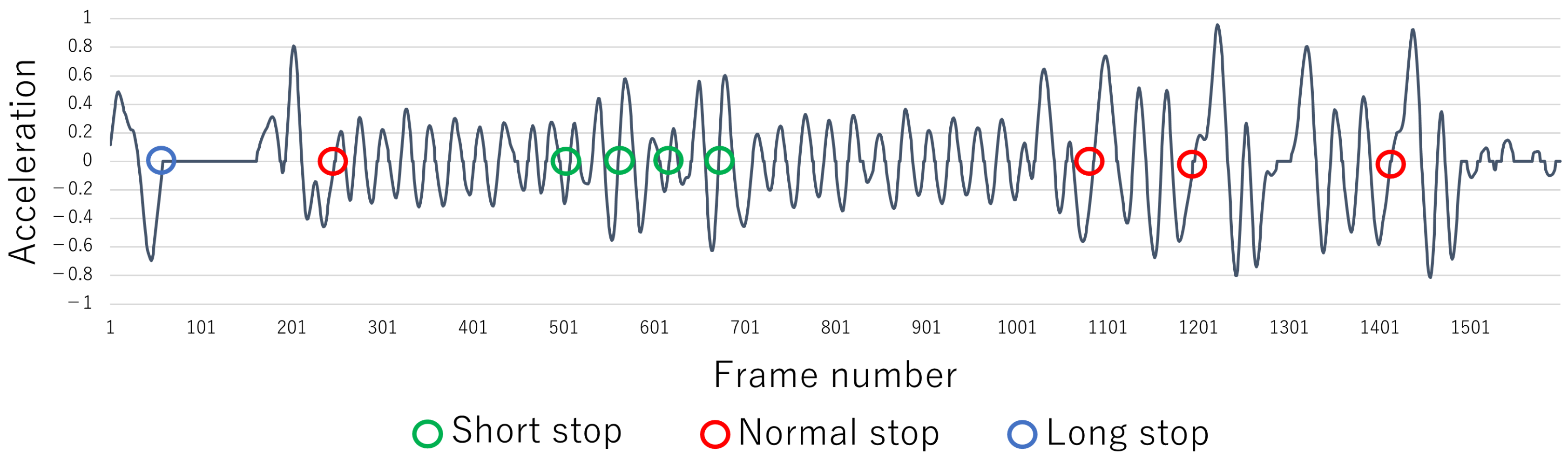
Figure 4. The green, red, and blue circles indicate frames that have been visually confirmed to be stopped. It can be confirmed that some of the frames whose velocities are minimal or approach 0 are stops (frames of stop possibility, i.e., of the possibility of stopped motion). The green, red, and blue circles are defined as short, normal, and long stops, respectively. Moreover, among the stop possibility frames, a frame that shows no stop is defined as no stop.
Table 1 shows the characteristics of each stop. However, since the characteristics of short, normal, and long stops differ, they are labeled separately to improve the NN’s accuracy of stop detection below.
3.1.2. Calculation of Acceleration
To detect stopping, we calculate acceleration, which is strongly related to the sharpness of movements. Specifically, using the calculated velocity
, the first derivative
of the velocity
is calculated by the 5-point approximation formula, as shown in Equation (
5).
where, to obtain the displacement for each frame,
is set in this paper. Then,
is calculated by normalizing the result obtained by Equation (
5) in the range of
to 1, and the minimum and maximum values are determined the same way as the calculation of
. At this time, the frame at the moment when
becomes a value from negative to zero or more is the frame when velocity
becomes the minimum. However, the frame at the moment when the velocity
approaches zero is slightly delayed with this method. Therefore, the acceleration
is calculated from
as shown in Equation (
6).
Note that the threshold (=0.05) is set to suppress minute discrepancies, determined empirically from test data from multiple experiments. By calculating
, it is possible to find all stop possibility frames. An example of the acceleration
is shown in
Figure 5. The green, red, and blue circles are frames whose accelerations change from negative to 0 and which correspond to each stop or stop possibility frame in
Figure 4.
3.1.3. Construction of Training Data Set for Stop Detection
The NN’s training data are constructed by using velocity and acceleration. The frame number of each stop possibility frame in
Figure 4 and
Figure 5 is called
t. In addition, the operation’s stop time tended to be about 25 to 50 frames. Therefore, the characteristics related to before and after the stop possibility frame
t are calculated from Equations (
7)–(
10) by using
and
. As a result, the NN’s training data for four elements
are obtained. These are approximations of the graph area of
Figure 4 and
Figure 5 in the range of 25 frames before and after the
t frame.
3.2. Construction of a Stop Detection Model of the NN
This section describes how to detect a stop by forwarding the propagation type of the NN using the motion features calculated in the previous section. The NN used in the proposed method consists of an input layer, a hidden N-layer, and an output layer. The motion features of each frame calculated in the previous section are used as a vector with
as input data. In the output, the values
of the class indicating the detection result are associated. Let the number of nodes in the input, hidden, and output layers be
and
C, respectively. The bias is set by
. Let the vector of motion features
correspond to
. The following propagation equation is obtained at the node of the
l in the middle layer, as shown in Equation (
11).
where,
is the weight between the input layer and the hidden layer. Note that the rectified linear unit (RELU) function [
27] is used as the activation function
. The linear sum
of the output of the hidden element, including the bias and the weight
between the hidden and output layers, is obtained as shown in Equation (
12).
is the
c-th output value in the output layer.
Moreover, the following
can be obtained as the probability value indicating the class by conversion with Equation (
13) (softmax function [
28]) using all the outputs in the output layer.
In the NN’s training, the weights and biases for each layer that minimize the cross-entropy error [
29] are determined by using the training data set created in the previous section. Finally, the short, normal, long, and no stops are classified by inputting the same test data as the training data format to the trained NN.
3.3. Visualization of a Stop by Human-like 3D Model in Virtual Reality
This section describes the visualization of a stop by the proposed system. The system described below was developed using Unity (
https://unity.com, accessed on 16 March 2022), a virtual reality (VR) development environment. Unity is used to visualize motion analysis research [
20,
30] and is also useful for actual application development. So, we used the development engine of this virtual environment. For effective practice, it is important for the system to visualize the differences in stop timing between the expert and the performer. Our proposed system can easily confirm the detection results, side by side, of stops made by the expert and by the performer. In the following sections, we describe the functions of the visualization system in detail.
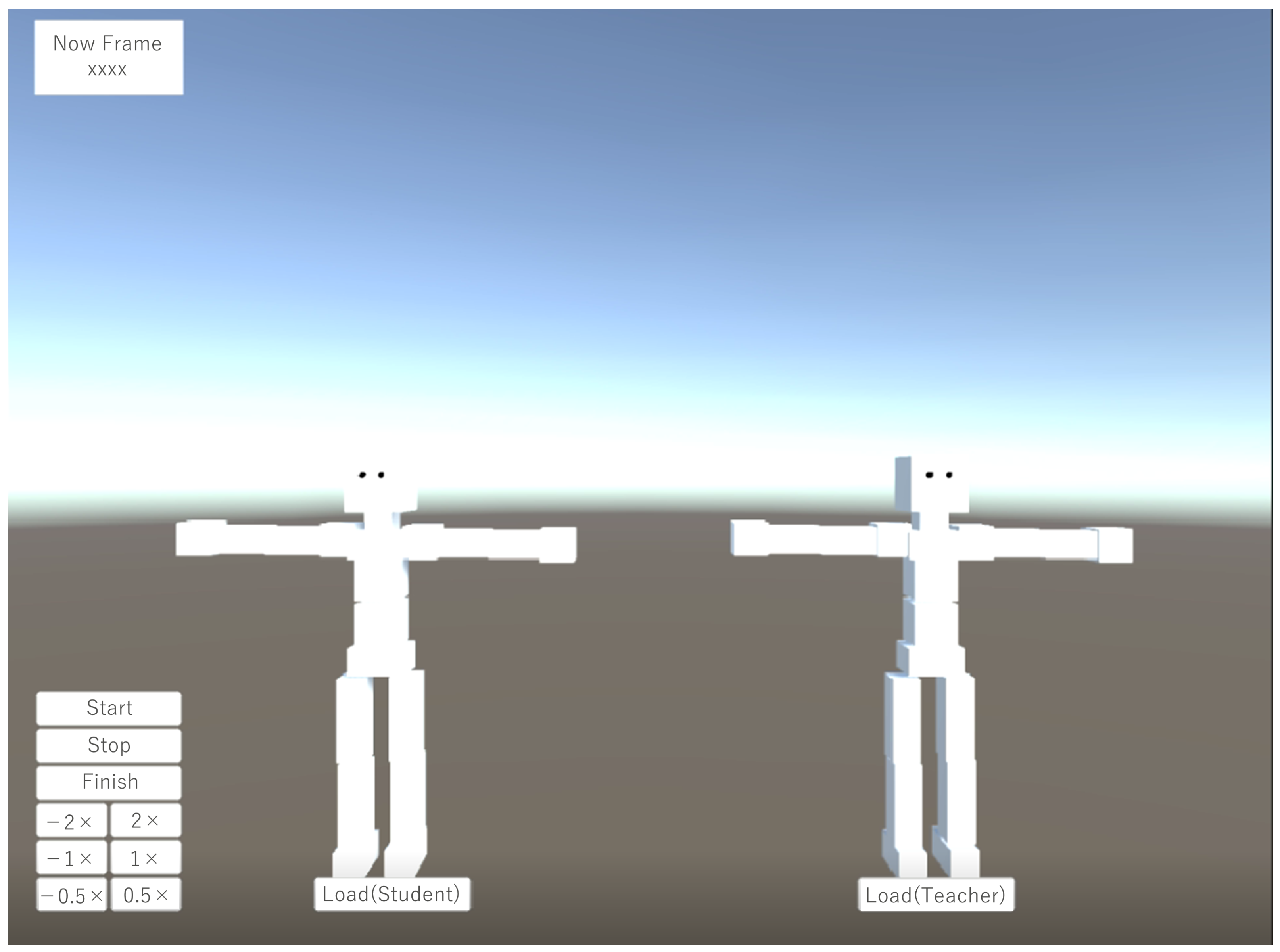
First, using the stop detection model constructed in the previous section, we obtain the stop detection results from the motion data for testing. Next, we prepare the two human 3D models shown in
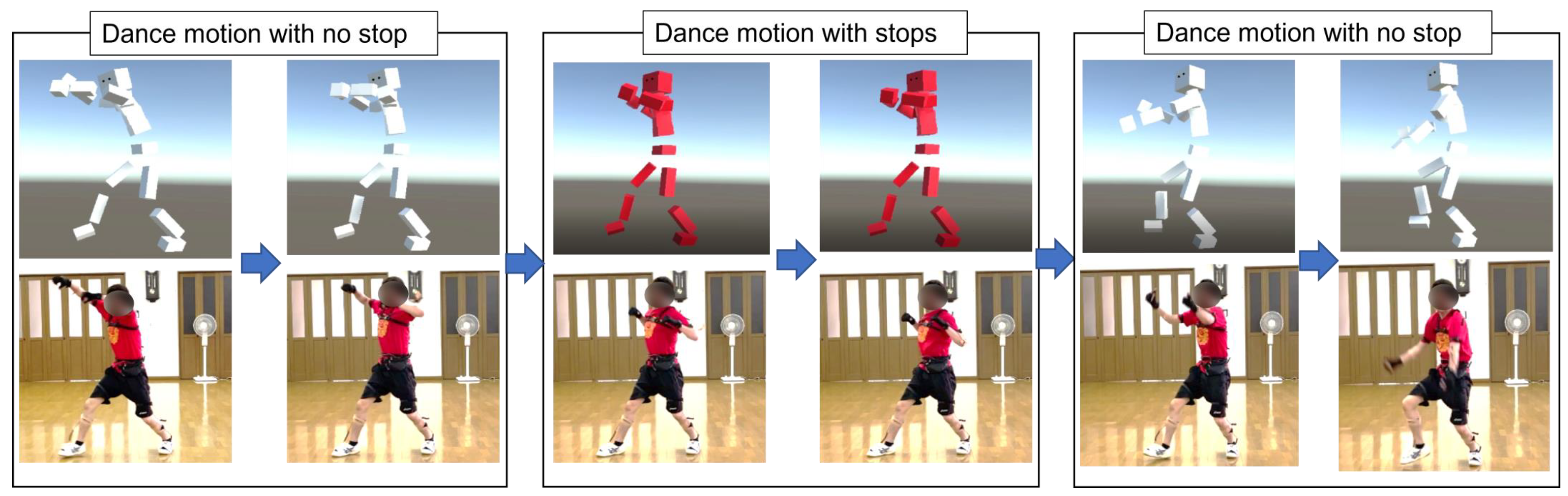
Figure 6 in the VR space and adapt the dance motion. By clicking the Load button below the 3D model, the recorded dance motion is applied to each 3D model. By adopting the dance motion to the human 3D model, the model moves in the same way as the dance motion recorded by motion capture and the color of the model changes to red only when a stop is performed during the dance movement, as shown in
Figure 7. The details of the various user interfaces (UI) of the visualization system are shown in
Table 2. Specifically, the UI allows the user to fast-forward and rewind the motion data at 0.5×, 1×, and 2× speeds. The upper-right corner of the screen displays the current frame number, giving the performer an idea of the timing of the choreography he or she wants to check. One of them is the dance movement of the performer, and the other is the dance movement of the expert. This allows the performer to visually learn the difference in posture and timing of the stops of the performer and the expert.
5. Conclusions
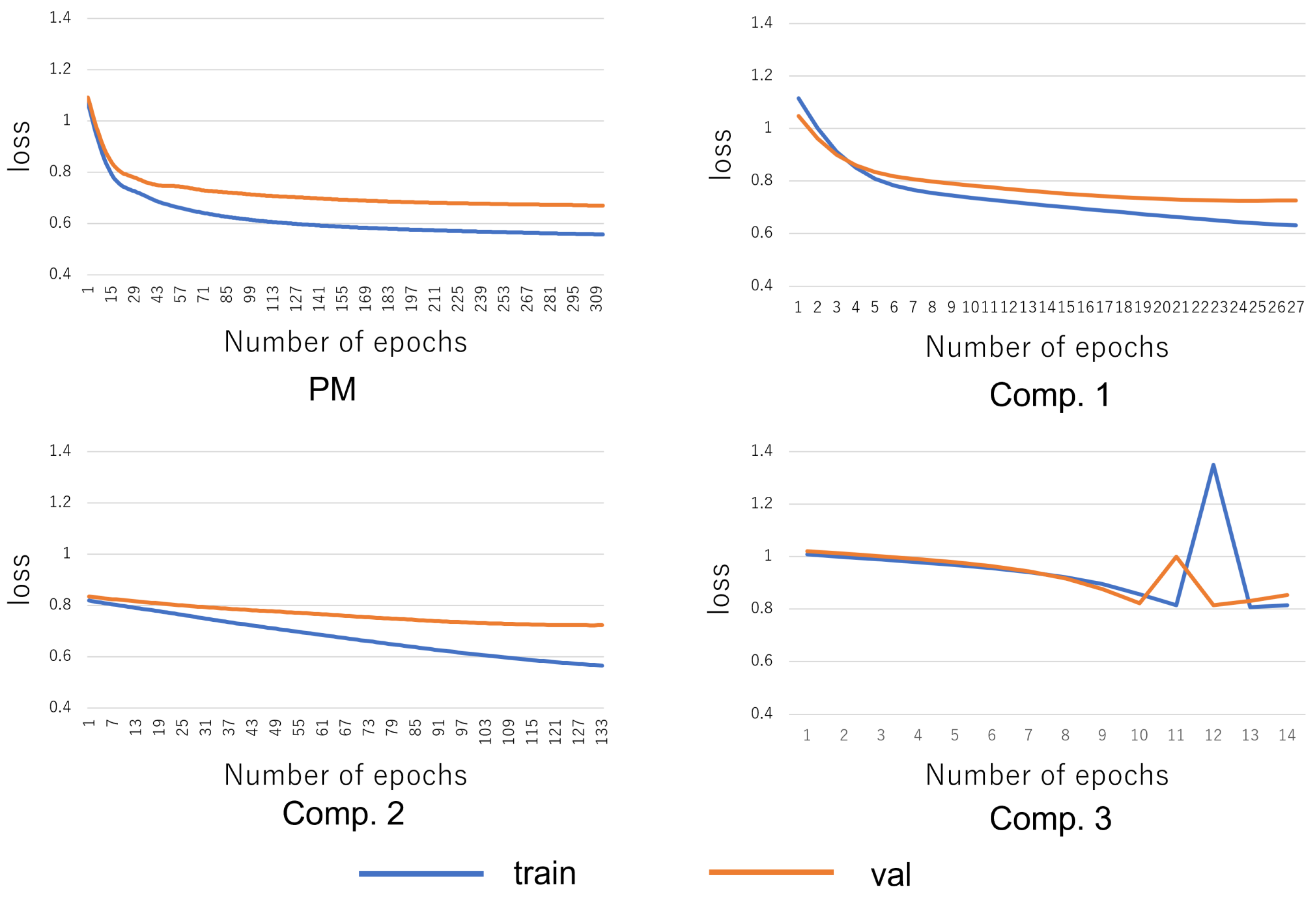
In group dance, stops are important to improve the synchronization of the troupe’s movements. However, due to the effects of COVID-19, school, work, and so on, it is difficult to practice dancing in groups. This study proposes a dance practice support system based on detecting stops in a remote environment. The most accurate stop detection among machine learning methods was achieved by training the NN with velocity and acceleration features. Experiments showed the effectiveness of the proposed method. In addition, the detected stops were visualized using a humanoid 3D model. With these, remote control construction of a future dance practice environment was proposed.
In the experiment, the NN’s detected stops more accurately than comparative methods. On the other hand, the comparative methods also showed relatively high detection results. From this point of view, it can be said that it is possible to detect stops using various models, and it is expected that a system can be developed at low cost and have a direct effect on dance practice. In addition, because stops are an essential technique not only in Yosakoi Soran but also in a wide range of various genres of dance, the proposed system can be easily applied to other forms of dance by obtaining training data sets from other experienced dancers.
It is difficult to estimate 3D human pose with high accuracy, including depth, based on video images. Therefore, although MoCap was used in this study, the proposed method can be used if the coordinate information can be obtained in three dimensions, including depth. If video-based 3D human pose estimation technology including depth [
36,
37,
38] can be put to practical use, a better training environment will be constructed.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}