
MEMS Vibrometer for Structural Health Monitoring Using Guided Ultrasonic Waves

 , , , , , and
, , , , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Concept of MEMS Vibrometer Response
3. Materials and Methods
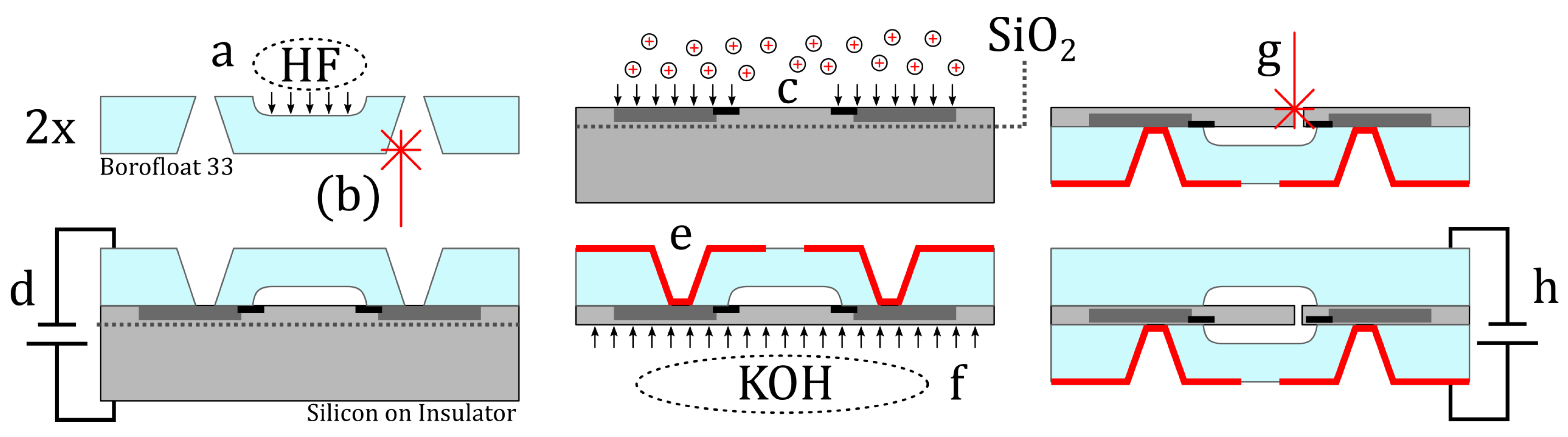
3.1. Resonator Design and Fabrication
3.2. Experimental Modal Analysis of the MEMS
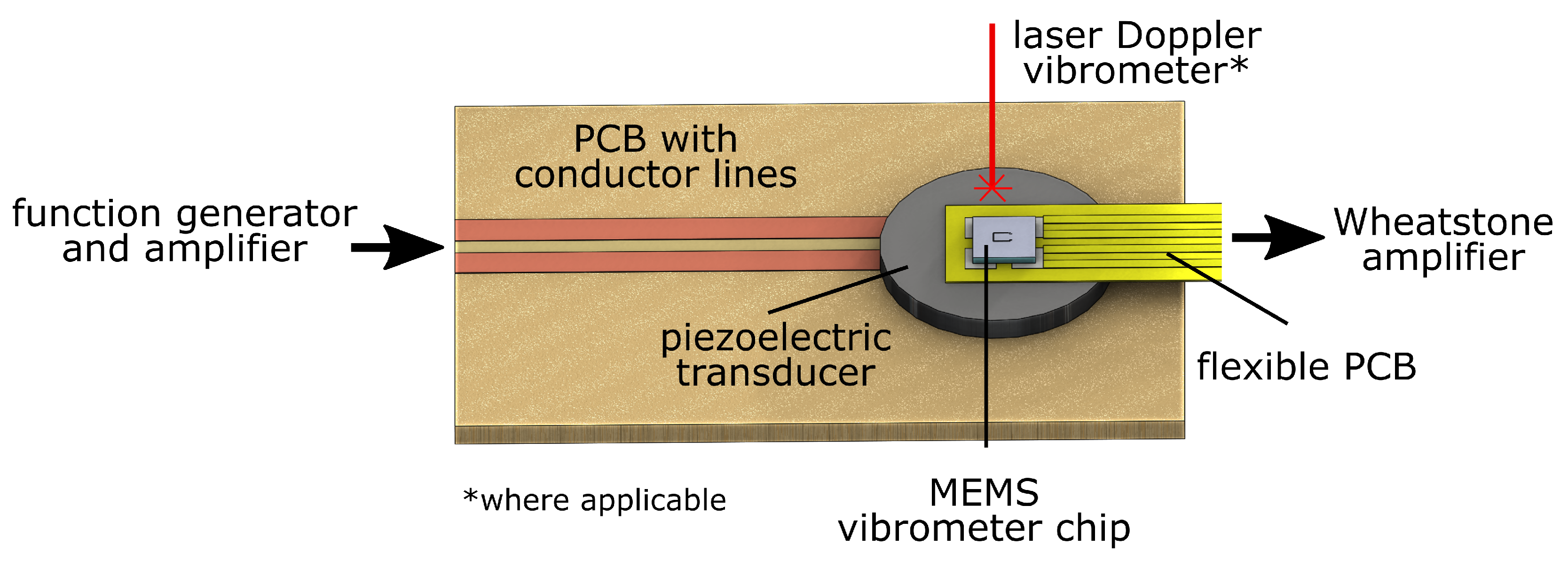
3.3. Setup for Dynamic Sensor Signal Response Characterization
3.4. GUW Setup
4. Results
4.1. Modal Analysis of the Micro Cantilever
4.2. Dynamic MEMS Vibrometer Response
4.3. Detection of GUW
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press/Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Lammering, R.; Gabbert, U.; Sinapius, M.; Schuster, T.; Wierach, P. Lamb-Wave Based Structural Health Monitoring in Polymer Composites; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Kazari, H.; Kabir, M.; Mostavi, A.; Ozevin, D. Multi-Frequency Piezoelectric Micromachined Ultrasonic Transducers. IEEE Sensors J. 2019, 19, 11090–11099. [Google Scholar] [CrossRef]
- Kumar, A.; Prasad, M.; Janyani, V.; Yadav, R.P. Fabrication and Annealing Temperature Optimization for a Piezoelectric ZnO Based MEMS Acoustic Sensor. J. Electron. Mater. 2019, 48, 5693–5701. [Google Scholar] [CrossRef]
- Butaud, P.; Le Moal, P.; Bourbon, G.; Placet, V.; Ramasso, E.; Verdin, B.; Joseph, E. Towards a better understanding of the CMUTs potential for SHM applications. Sens. Actuators A Phys. 2020, 313, 112212. [Google Scholar] [CrossRef]
- Jain, A.; Minajagi, S.; Dange, E.; Bhover, S.U.; Dharanendra, Y. Impact and acoustic emission performance of polyvinylidene fluoride sensor embedded in glass fiber-reinforced polymer composite structure. Polym. Polym. Compos. 2021, 29, 354–361. [Google Scholar] [CrossRef]
- Andreades, C.; Meo, M.; Ciampa, F. Fatigue testing and damage evaluation using smart CFRP composites with embedded PZT transducers. Mater. Today Proc. 2021, 34, 260–265. [Google Scholar] [CrossRef]
- Feng, T.; Aliabadi, M.H.F. Structural Integrity Assessment of Composites Plates with Embedded PZT Transducers for Structural Health Monitoring. Materials 2021, 14, 6148. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Maxwell, L.; Li, F.; Kumar, A.; Ransom, E.; Topac, T.; Lee, S.; Faisal Haider, M.; Dardona, S.; Chang, F.K. Design and Integration of a Wireless Stretchable Multimodal Sensor Network in a Composite Wing. Sensors 2020, 20, 2528. [Google Scholar] [CrossRef] [PubMed]
- Lissenden, C.; Liu, Y.; Choi, G.; Yao, X. Effect of localized microstructure evolution on higher harmonic generation of guided waves. J. Nondestruct. Eval. 2014, 33, 178–186. [Google Scholar] [CrossRef]
- Haus, J.N.; Rittmeier, L.; Roloff, T.; Mikhaylenko, A.; Bornemann, S.; Sinapius, M.; Rauter, N.; Lang, W.; Dietzel, A. Micro-Oscillator as Integrable Sensor for Structure-Borne Ultrasound. Eng. Proc. 2021, 10, 81. [Google Scholar] [CrossRef]
- Analog Devices. 3-Axis, ±2 g/±4 g/±8 g/±16 g Digital Accelerometer. 2022. Rev. G. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ADXL345.pdf (accessed on 14 June 2022).
- STMicroelectronics. MEMS Digital Output Motion Sensor: High-Performance 3-Axis Accelerometer for Automobile Applications. 2021. Rev. 4. Available online: https://www.st.com/resource/en/datasheet/ais2ih.pdf (accessed on 14 June 2022).
- Younis, M.I. MEMS Linear and Nonlinear Statics and Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 20. [Google Scholar]
- Lang, W. Sensors and Measurement Systems; River Publishers: Gistrup, Denmark, 2019. [Google Scholar]
- Inman, D.J.; Singh, R.C. Engineering Vibration; Prentice Hall: Englewood Cliffs, NJ, USA, 1994; Volume 3. [Google Scholar]
- Meirovitch, L. Analytical Methods in Vibrations; McMillan Pub. Co. Inc.: New York, NY, USA, 1967. [Google Scholar]
- Weaver, W., Jr.; Timoshenko, S.P.; Young, D.H. Vibration Problems in Engineering; John Wiley & Sons: Hoboken, NJ, USA, 1991. [Google Scholar]
- Haus, J.N.; Schwerter, M.; Schneider, M.; Gäding, M.; Leester-Schädel, M.; Schmid, U.; Dietzel, A. Robust Pressure Sensor in SOI Technology with Butterfly Wiring for Airfoil Integration. Sensors 2021, 21, 6140. [Google Scholar] [CrossRef] [PubMed]
- Bocchini, P.; Marzani, A.; Viola, E. Graphical user interface for guided acoustic waves. J. Comput. Civ. Eng. 2011, 25, 202–210. [Google Scholar] [CrossRef]
- Rittmeier, L.; Roloff, T.; Haus, J.N.; Dietzel, A.; Sinapius, M. Design of a Characterisation Environment for a MEMS Ultrasound Sensor under Guided Ultrasonic Wave Excitation. Eng. Proc. 2021, 10, 58. [Google Scholar] [CrossRef]
- Bornemann, S.; Lang, W. Experimental Study on Stress Impact during FML Manufacturing on the Functional Conformity of an Embeddable SHM-Sensor-Node. Eng. Proc. 2021, 10, 72. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haus, J.N.; Lang, W.; Roloff, T.; Rittmeier, L.; Bornemann, S.; Sinapius, M.; Dietzel, A. MEMS Vibrometer for Structural Health Monitoring Using Guided Ultrasonic Waves. Sensors 2022, 22, 5368. https://doi.org/10.3390/s22145368
Haus JN, Lang W, Roloff T, Rittmeier L, Bornemann S, Sinapius M, Dietzel A. MEMS Vibrometer for Structural Health Monitoring Using Guided Ultrasonic Waves. Sensors. 2022; 22(14):5368. https://doi.org/10.3390/s22145368
Chicago/Turabian StyleHaus, Jan Niklas, Walter Lang, Thomas Roloff, Liv Rittmeier, Sarah Bornemann, Michael Sinapius, and Andreas Dietzel. 2022. "MEMS Vibrometer for Structural Health Monitoring Using Guided Ultrasonic Waves" Sensors 22, no. 14: 5368. https://doi.org/10.3390/s22145368